3: Bewegungen und Ähnlichkeiten:
|
|
|
- Ida Feld
- vor 5 Jahren
- Abrufe
Transkript
 Figuren?")
1 3: Bewegungen und Ähnlichkeiten: Was sind kongruente (bzw. deckungsgleiche) Figuren? [Box2-94]

2 [Kra2-138]


3 [Rei2-173a] [Rei2-173b]
4 Zwei Teilmengen M,M einer Euklidischen Ebene (E,G) heißen kongruent, wenn sie durch eine Bewegung ineinander übergeführt werden; d.h. es gibt eine Bewegung ϕ : E E mit ϕ(m) = M. Satz (4) Es sei (E,G) eine Euklidische Ebene und g G. Dann existiert genau eine Abbildung S g : E E mit folgenden Eigenschaften: GS1) für alle P g gilt: S g (P) = P GS2) für alle P g gilt: ist h G die (eindeutig bestimmte) Gerade mit P h und h g, und ist g h = {S}, so ist S g (P) := P der (eindeutig bestimmte) Punkt P h mit l( PS) = l( P S) und P P. Die Abbildung S g heißt dann die Spiegelung an der Geraden g.
5 I. Synthetischer Zugang Definition (7) (Bewegung I.) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E heißt eine Bewegung, wenn es Geraden g 1,...,g k G gibt, sodass f = S gk S g2 S g1 gilt. Satz (5) Jede Hintereinanderausführung von 4 Geradenspiegelungen lässt sich als Verknüpfung von höchstens 2 Geradenspiegelungen darstellen und ist daher eine Translation oder eine Rotation. Korollar Jede Bewegung (im Sinne von Definition I.) lässt sich als Verknüpfung von höchstens 3 Geradenspiegelungen darstellen und ist daher: eine Geradenspiegelung oder eine Translation oder eine Rotation oder eine Schubspiegelung.
6 I. Synthetischer Zugang Definition (7) (Bewegung I.) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E heißt eine Bewegung, wenn es Geraden g 1,...,g k G gibt, sodass f = S gk S g2 S g1 gilt. Satz (5) Jede Hintereinanderausführung von 4 Geradenspiegelungen lässt sich als Verknüpfung von höchstens 2 Geradenspiegelungen darstellen und ist daher eine Translation oder eine Rotation. Korollar Jede Bewegung (im Sinne von Definition I.) lässt sich als Verknüpfung von höchstens 3 Geradenspiegelungen darstellen und ist daher: eine Geradenspiegelung oder eine Translation oder eine Rotation oder eine Schubspiegelung.
7 I. Synthetischer Zugang Definition (7) (Bewegung I.) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E heißt eine Bewegung, wenn es Geraden g 1,...,g k G gibt, sodass f = S gk S g2 S g1 gilt. Satz (5) Jede Hintereinanderausführung von 4 Geradenspiegelungen lässt sich als Verknüpfung von höchstens 2 Geradenspiegelungen darstellen und ist daher eine Translation oder eine Rotation. Korollar Jede Bewegung (im Sinne von Definition I.) lässt sich als Verknüpfung von höchstens 3 Geradenspiegelungen darstellen und ist daher: eine Geradenspiegelung oder eine Translation oder eine Rotation oder eine Schubspiegelung.
8 II. Längentreue Abbildungen Definition (8) (Bewegung II.) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E heißt eine Bewegung, wenn für alle A,B E gilt: AB) = l( f(a)f(b)), l( d.h.: f ist eine längentreue Abbildung (oder: eine Isometrie). Satz (6) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E ist genau dann eine Bewegung nach Definition I., wenn sie eine Bewegung nach Definition II. ist.
9 II. Längentreue Abbildungen Definition (8) (Bewegung II.) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E heißt eine Bewegung, wenn für alle A,B E gilt: AB) = l( f(a)f(b)), l( d.h.: f ist eine längentreue Abbildung (oder: eine Isometrie). Satz (6) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E ist genau dann eine Bewegung nach Definition I., wenn sie eine Bewegung nach Definition II. ist.
10 III. Orthogonale affine Abbildungen Definition (9) (Bewegung III.) Es sei (E,G) eine Euklidische Ebene, die (mittels eines ON-Koordinatensystems) als 2-dimensionaler affiner Raum über R aufgefasst werde. Eine Bewegung ist eine affine Abbildung f : E E (vgl. Definition 6), deren zugehörige lineare Abbildung ϕ orthogonal ist. Satz (vgl. Lineare Algebra) R n sei mit dem Standardskalarprodukt (und der Euklidischen Norm) versehen. Für eine lineare Abbildung ϕ : R n R n sind folgende Aussagen äquivalent: a) ϕ ist orthogonal. b) Für alle x R n gilt: ϕ(x) = x. c) Für alle x,y R n gilt: ϕ(x) ϕ(y) = x y. d) Bezüglich einer/jeder ON-Basis des R n wird ϕ durch eine orthogonale Matrix beschrieben.
11 III. Orthogonale affine Abbildungen Definition (9) (Bewegung III.) Es sei (E,G) eine Euklidische Ebene, die (mittels eines ON-Koordinatensystems) als 2-dimensionaler affiner Raum über R aufgefasst werde. Eine Bewegung ist eine affine Abbildung f : E E (vgl. Definition 6), deren zugehörige lineare Abbildung ϕ orthogonal ist. Satz (vgl. Lineare Algebra) R n sei mit dem Standardskalarprodukt (und der Euklidischen Norm) versehen. Für eine lineare Abbildung ϕ : R n R n sind folgende Aussagen äquivalent: a) ϕ ist orthogonal. b) Für alle x R n gilt: ϕ(x) = x. c) Für alle x,y R n gilt: ϕ(x) ϕ(y) = x y. d) Bezüglich einer/jeder ON-Basis des R n wird ϕ durch eine orthogonale Matrix beschrieben.


12 Kongruenzsätze in der Schule Was ist ein Dreieck? [Kra2-165] [Kra2-171]
13 [Rei2-188]

14 [Box2-135]
15 [Kra2-173]

16 [Kra2-176]
![[Kra2-177] Was bedeuten die Kongruenzsätze?](/docs-images/93/111457014/images/17-1.jpg "a) Stimmen zwei Dreiecke in den jeweiligen Bestimmungsstücken überein, so sind sie kongruent (und die Bewegung, die sie aufeinander abbildet,")
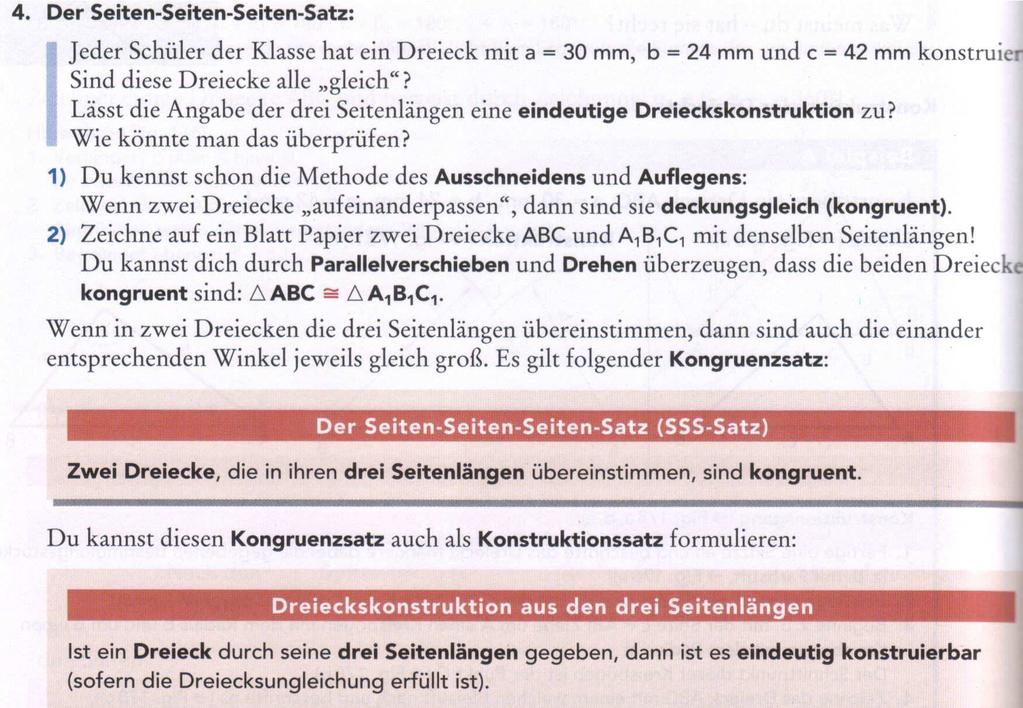
17 [Kra2-177] Was bedeuten die Kongruenzsätze? a) Stimmen zwei Dreiecke in den jeweiligen Bestimmungsstücken überein, so sind sie kongruent (und die Bewegung, die sie aufeinander abbildet, ist eindeutig bestimmt!) b) Mit den jeweiligen Bestimmungsstücken ist ein Dreieck eindeutig gegeben.

18 Ähnlichkeiten [Rei3-191]

19 [Rei3-200]
20 [Kra3-152]
21 Definition (10) Es sei (E, G) eine Euklidische Ebene. Eine Abbildung f : E E heißt eine Ähnlichkeit, wenn für alle A, B, C E gilt: ABC = f(a)f(b)f(c). Äquivalent dazu ist: Wenn es eine positive Konstante c > 0 gibt, sodass für alle A,B E gilt: l( f(a)f(b)) = c l( AB). (c heißt der Streckungsfaktor der Ähnlichkeit f.)

22 Teilung einer Strecke in gleich lange Teile [Kra3-156]
23 [Rei3-195a]

24 Der Strahlensatz [Box3-174]

25 Weiter: diese Sätze gelten auch, wenn die Parallelen g und h auf zwei verschiedenen Seiten von S liegen. [Kra3-157]
26 [Rei3-195b]

27 Vergrößern, Verkleinern, Maßstab [Kra3-163]
28 [Box3-169]
2. Isometrien oder Kongruenzabbildungen
 6 2. Isometrien oder Kongruenzabbildungen 2.1 Einführende Überlegungen Kongruente Figuren sind deckungsgleiche Figuren. Eine Figur wird so bewegt, dass sie mit einer anderen Figur zur Deckung gebracht
6 2. Isometrien oder Kongruenzabbildungen 2.1 Einführende Überlegungen Kongruente Figuren sind deckungsgleiche Figuren. Eine Figur wird so bewegt, dass sie mit einer anderen Figur zur Deckung gebracht
Aufgaben und Lösungen zur Klausur Lineare Algebra im Frühjahr 2009
 I. (4 Punkte) Gegeben sei die Menge Aufgaben und Lösungen zur Klausur Lineare Algebra im Frühjahr 9 G := { a c b a, b, c R }. (a) Zeigen Sie, dass G zusammen mit der Matrizenmultiplikation eine Gruppe
I. (4 Punkte) Gegeben sei die Menge Aufgaben und Lösungen zur Klausur Lineare Algebra im Frühjahr 9 G := { a c b a, b, c R }. (a) Zeigen Sie, dass G zusammen mit der Matrizenmultiplikation eine Gruppe
3. Ähnlichkeitsabbildungen
 3. Ähnlichkeitsabbildungen 3.1 Definitionen: Ähnlichkeitsabbildungen, Dilatationen Bis jetzt haben wir Isometrien (Kongruenzabbildungen) betrachtet. Diese bbildungen wurden aufgebaut aus den Geradenspiegelungen.
3. Ähnlichkeitsabbildungen 3.1 Definitionen: Ähnlichkeitsabbildungen, Dilatationen Bis jetzt haben wir Isometrien (Kongruenzabbildungen) betrachtet. Diese bbildungen wurden aufgebaut aus den Geradenspiegelungen.
37 II.1. Abbildungen
 37 II.1. Abbildungen "Abbildung" und "Funktion" sind verschiedene Namen für denselben Begriff, der charakterisiert ist durch die Angabe der Definitionsmenge ("Was wird abgebildet?"), der Wertemenge ("Wohin
37 II.1. Abbildungen "Abbildung" und "Funktion" sind verschiedene Namen für denselben Begriff, der charakterisiert ist durch die Angabe der Definitionsmenge ("Was wird abgebildet?"), der Wertemenge ("Wohin
Klausurenkurs zum Staatsexamen (WS 2015/16): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 5/6): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 5/6): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung
 Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung Def. Eine Gleitspiegelung ist eine Spiegelung an einer Geraden (Spiegelachse) verknüpft mit einer Translation parallel zu dieser
Gleitspiegelung und Verkettungen von Spiegelung und Parallelverschiebung Def. Eine Gleitspiegelung ist eine Spiegelung an einer Geraden (Spiegelachse) verknüpft mit einer Translation parallel zu dieser
5.4 Affine Abbildungen in C 2 und R 2
 5.4 Affine Abbildungen in C 2 und R 2 Notation. Wir erinnern an die affine Ähnlichkeit von Matrizen (5.3.(ii)): L, L n (K). Dann: L a L 2 falls C AGL n (K) mit C L 2 C = L. Die aus 3.2.9 bekannte übliche
5.4 Affine Abbildungen in C 2 und R 2 Notation. Wir erinnern an die affine Ähnlichkeit von Matrizen (5.3.(ii)): L, L n (K). Dann: L a L 2 falls C AGL n (K) mit C L 2 C = L. Die aus 3.2.9 bekannte übliche
Klausurenkurs zum Staatsexamen (WS 2016/17): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 6/7): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 6/7): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Klausurenkurs zum Staatsexamen (SS 2015): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 5): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema, Aufgabe 4) Im R seien die beiden Ebenen E : 6 x + 4 y z = und E : + s + t 4 gegeben.
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 5): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema, Aufgabe 4) Im R seien die beiden Ebenen E : 6 x + 4 y z = und E : + s + t 4 gegeben.
Geometrie (4b) Wintersemester 2015/16. Kapitel 2. Abbildungsgeometrie. Teil 2
 Wintersemester 2015/16. Kapitel 2. Abbildungsgeometrie. Teil 2") Kapitel 2 Abbildungsgeometrie Teil 2 1 Maximilian Geier, Institut für Mathematik, Campus Landau, Universität Koblenz Landau Kapitel 2 Abbildungsgeometrie 2.1 2,3,4 Geradenspiegelungen 2.2 Sinn & Orientierung
Kapitel 2 Abbildungsgeometrie Teil 2 1 Maximilian Geier, Institut für Mathematik, Campus Landau, Universität Koblenz Landau Kapitel 2 Abbildungsgeometrie 2.1 2,3,4 Geradenspiegelungen 2.2 Sinn & Orientierung
Lineare Algebra II 8. Übungsblatt
 Lineare Algebra II 8. Übungsblatt Fachbereich Mathematik SS 11 Prof. Dr. Kollross 1./9. Juni 11 Susanne Kürsten Tristan Alex Gruppenübung Aufgabe G1 (Minitest) Sei V ein euklidischer oder unitärer Vektorraum.
Lineare Algebra II 8. Übungsblatt Fachbereich Mathematik SS 11 Prof. Dr. Kollross 1./9. Juni 11 Susanne Kürsten Tristan Alex Gruppenübung Aufgabe G1 (Minitest) Sei V ein euklidischer oder unitärer Vektorraum.
Klausurenkurs zum Staatsexamen (WS 2013/14): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 3/4): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 gegeben.
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 3/4): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 gegeben.
Elementare Geometrie Vorlesung 17
 Elementare Geometrie Vorlesung 17 Thomas Zink 21.6.2017 1.Ähnlichkeiten Definition Eine Ähnlichkeit f : E E ist eine bijektive Abbildung, so dass (1) Wenn a E eine Gerade ist, so ist auch f(a) eine Gerade.
Elementare Geometrie Vorlesung 17 Thomas Zink 21.6.2017 1.Ähnlichkeiten Definition Eine Ähnlichkeit f : E E ist eine bijektive Abbildung, so dass (1) Wenn a E eine Gerade ist, so ist auch f(a) eine Gerade.
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 10.12.2013 Alexander Lytchak 1 / 15 Motivation Für das Verständis affiner Teilräume eines Vektorraums sind Translationen
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 10.12.2013 Alexander Lytchak 1 / 15 Motivation Für das Verständis affiner Teilräume eines Vektorraums sind Translationen
Analytische Geometrie
 21 Vorlesungen über Analytische Geometrie für Lehramtstudierende der Schulformen Grund-, Mittel- und Realschule Jens Jordan Universität Würzburg, Wintersemster 2015/16 Hier kommt noch ein schönes Bildchen
21 Vorlesungen über Analytische Geometrie für Lehramtstudierende der Schulformen Grund-, Mittel- und Realschule Jens Jordan Universität Würzburg, Wintersemster 2015/16 Hier kommt noch ein schönes Bildchen
3 Das n-dimensionale Integral
 3 Das n-dimensionale Integral Ziel: Wir wollen die Integrationstheorie für f : D R n R entwickeln. Wir wollen den Inhalt (beziehungsweise das Maß ) M einer Punktmenge des R n definieren für eine möglichst
3 Das n-dimensionale Integral Ziel: Wir wollen die Integrationstheorie für f : D R n R entwickeln. Wir wollen den Inhalt (beziehungsweise das Maß ) M einer Punktmenge des R n definieren für eine möglichst
Affine Eigenschaften ( stets K = R)
") Affine Eigenschaften ( stets K = R) Def. 15 Sei M eine Teilmenge eines affinen Raums A über V (über K). Eine Eigenschaft der Menge M heißt affin, wenn für jede Affinität F : A A 1 die Bildmenge {F(a)wobei
Affine Eigenschaften ( stets K = R) Def. 15 Sei M eine Teilmenge eines affinen Raums A über V (über K). Eine Eigenschaft der Menge M heißt affin, wenn für jede Affinität F : A A 1 die Bildmenge {F(a)wobei
Klausur (Modulprüfung) zum Lehrerweiterbildungskurs Geometrie WiSe 2014/2015 am
 zum Lehrerweiterbildungskurs Geometrie WiSe 2014/2015 am") Klausur (Modulprüfung) zum Lehrerweiterbildungskurs Geometrie WiSe 2014/2015 am 23.1.2015 Bearbeiten Sie bitte zwei der drei folgenden Aufgaben! Falls Sie alle drei Aufgaben bearbeitet haben sollten, kennzeichnen
Klausur (Modulprüfung) zum Lehrerweiterbildungskurs Geometrie WiSe 2014/2015 am 23.1.2015 Bearbeiten Sie bitte zwei der drei folgenden Aufgaben! Falls Sie alle drei Aufgaben bearbeitet haben sollten, kennzeichnen
Modulprüfung zum Lehrerweiterbildungskurs Geometrie am
 Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 28.6.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden Aufgaben!
Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 28.6.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden Aufgaben!
1.5 Kongruenz und Ähnlichkeit
 19 1.5 Kongruenz und Ähnlichkeit Definition Sei A n der affine Standardraum zum Vektorraum R n. Eine Abbildung F : A n A n heißt Isometrie, falls d(f (X), F (Y )) = d(x, Y ) für alle X, Y A n gilt. Es
19 1.5 Kongruenz und Ähnlichkeit Definition Sei A n der affine Standardraum zum Vektorraum R n. Eine Abbildung F : A n A n heißt Isometrie, falls d(f (X), F (Y )) = d(x, Y ) für alle X, Y A n gilt. Es
Modulteilprüfung Geometrie (BaM-GS, L3M-RF)
") Modulteilprüfung Geometrie (BaM-GS, L3M-RF) Prof. Dr. Martin Möller SoSe 2011 // 05. Juli 2011 Kontrollieren Sie, ob Sie alle Blätter (12 einschließlich zweier Deckblätter) erhalten haben, und geben Sie
Modulteilprüfung Geometrie (BaM-GS, L3M-RF) Prof. Dr. Martin Möller SoSe 2011 // 05. Juli 2011 Kontrollieren Sie, ob Sie alle Blätter (12 einschließlich zweier Deckblätter) erhalten haben, und geben Sie
Kapitel 2. Abbildungsgeometrie
 Kapitel 2 Abbildungsgeometrie 1 Maximilian Geier, Institut für Mathematik, Campus Landau, Universität Koblenz Landau Kapitel 2 Abbildungsgeometrie 2.1 2,3,4 Geradenspiegelungen 2.2 Sinn & Orientierung
Kapitel 2 Abbildungsgeometrie 1 Maximilian Geier, Institut für Mathematik, Campus Landau, Universität Koblenz Landau Kapitel 2 Abbildungsgeometrie 2.1 2,3,4 Geradenspiegelungen 2.2 Sinn & Orientierung
γ(a, γ(b, c)) = γ(γ(a, b), c)). γ(e, x) = γ(x, e) = x.
) = γ(γ(a, b), c)). γ(e, x) = γ(x, e) = x.") Algebraische Strukturen, insbesondere Gruppen 1 Verknüpfungen M sei eine Menge. Dann heißt jede Abbildung γ : M M M eine Verknüpfung (jedem Paar von Elementen aus M wird auf eindeutige Weise ein Element
Algebraische Strukturen, insbesondere Gruppen 1 Verknüpfungen M sei eine Menge. Dann heißt jede Abbildung γ : M M M eine Verknüpfung (jedem Paar von Elementen aus M wird auf eindeutige Weise ein Element
-dimensionale Darstellungen
 1.9 2 1 2 -dimensionale Darstellungen Auf einer Fläche F (2 dimensional) wird eine Operation ausgeführt Zum Beispiel wir eine Verschiebung um den Vektor t durchgeführt. Gemeint ist der Körper, der überstrichen
1.9 2 1 2 -dimensionale Darstellungen Auf einer Fläche F (2 dimensional) wird eine Operation ausgeführt Zum Beispiel wir eine Verschiebung um den Vektor t durchgeführt. Gemeint ist der Körper, der überstrichen
Prüfung Lineare Algebra 2
 1. Überprüfen Sie die folgenden Aussagen: (1) Zwei reelle symmetrische Matrizen sind genau dann ähnlich, wenn sie die gleiche Signatur haben. (2) Jede symmetrische Matrix ist kongruent zu einer Diagonalmatrix,
1. Überprüfen Sie die folgenden Aussagen: (1) Zwei reelle symmetrische Matrizen sind genau dann ähnlich, wenn sie die gleiche Signatur haben. (2) Jede symmetrische Matrix ist kongruent zu einer Diagonalmatrix,
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.44 2018/05/17 14:11:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.6 Bewegungen und Kongruenzbegriffe Wir untersuchen gerade die Spiegelung an einer Hyperebene h R d. Ist ein
$Id: vektor.tex,v 1.44 2018/05/17 14:11:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.6 Bewegungen und Kongruenzbegriffe Wir untersuchen gerade die Spiegelung an einer Hyperebene h R d. Ist ein
Unterlagen zur Vorlesung Algebra und Geometrie in der Schule: Grundwissen über Affine Geometrie. Sommersemester Franz Pauer
 Unterlagen zur Vorlesung Algebra und Geometrie in der Schule: Grundwissen über Affine Geometrie Sommersemester 2009 Franz Pauer INSTITUT FÜR MATHEMATIK, UNIVERSITÄT INNSBRUCK, TECHNIKERSTRASSE 13, 6020
Unterlagen zur Vorlesung Algebra und Geometrie in der Schule: Grundwissen über Affine Geometrie Sommersemester 2009 Franz Pauer INSTITUT FÜR MATHEMATIK, UNIVERSITÄT INNSBRUCK, TECHNIKERSTRASSE 13, 6020
4 Orthogonale Endormorphismen
 4 Orthogonale Endormorphismen Frage: Bei welchen Abbildungen R R bzw. R 3 R 3 bleibt der Abstand zwischen zwei Punkten erhalten? Für α R setzen wir cosα sin α D(α) = und S(α) := sin α cosα ( cos α sin
4 Orthogonale Endormorphismen Frage: Bei welchen Abbildungen R R bzw. R 3 R 3 bleibt der Abstand zwischen zwei Punkten erhalten? Für α R setzen wir cosα sin α D(α) = und S(α) := sin α cosα ( cos α sin
8 1. GEOMETRIE DIFFERENZIERBARER MANNIGFALTIGKEITEN
 8 1. GEOMETRIE DIFFERENZIERBARER MANNIGFALTIGKEITEN (vi) Konvergenz von Folgen ist in topologischen Räumen folgendermaßen definiert: Ist (a n ) M eine Folge, so heißt sie konvergent gegen a M, wenn es
8 1. GEOMETRIE DIFFERENZIERBARER MANNIGFALTIGKEITEN (vi) Konvergenz von Folgen ist in topologischen Räumen folgendermaßen definiert: Ist (a n ) M eine Folge, so heißt sie konvergent gegen a M, wenn es
Prüfung EM1 28. Jänner 2008 A :=
 1. Die Menge der Eigenwerte der Matrix ist Prüfung EM1 28. Jänner 2008 A := ( 0 1 ) 0 1 A. {1, 0} B. { 1} C. {0} D. {0, 1, 1} E. {0, 1} 2. Es seien V ein n-dimensionaler reeller Vektorraum, ein Skalarprodukt
1. Die Menge der Eigenwerte der Matrix ist Prüfung EM1 28. Jänner 2008 A := ( 0 1 ) 0 1 A. {1, 0} B. { 1} C. {0} D. {0, 1, 1} E. {0, 1} 2. Es seien V ein n-dimensionaler reeller Vektorraum, ein Skalarprodukt
Plan für Heute/Morgen
 Plan für Heute/Morgen Kongruenzsätze: aus der Schule wissen wir die SSS, SWS, und SSW Kongruenzsätze für Dreiecke: Wir wollen diese Sätze im Rahmen unseres Modells (wenn Punkte die 2 Tupel von reellen
Plan für Heute/Morgen Kongruenzsätze: aus der Schule wissen wir die SSS, SWS, und SSW Kongruenzsätze für Dreiecke: Wir wollen diese Sätze im Rahmen unseres Modells (wenn Punkte die 2 Tupel von reellen
Übersicht zur Vorlesung
 Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
Lineare Algebra und analytische Geometrie II
 Prof. Dr. H. Brenner Osnabrück SS 06 Lineare Algebra analytische Geometrie II Vorlesung 35 Winkeltreue Abbildungen Definition 35.. Eine lineare Abbildung ϕ: V W zwischen euklidischen Vektorräumen V W heißt
Prof. Dr. H. Brenner Osnabrück SS 06 Lineare Algebra analytische Geometrie II Vorlesung 35 Winkeltreue Abbildungen Definition 35.. Eine lineare Abbildung ϕ: V W zwischen euklidischen Vektorräumen V W heißt
Universität Bielefeld. Elementare Geometrie. Sommersemester Grundlagen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
5.1 Affine Räume und affine Abbildungen
 402 LinAlg II Version 1.2 21. Juli 2006 c Rudolf Scharlau 5.1 Affine Räume und affine Abbildungen Ein affiner Raum besteht aus zwei Mengen P und G zusammen mit einer Relation der Inzidenz zwischen ihnen.
402 LinAlg II Version 1.2 21. Juli 2006 c Rudolf Scharlau 5.1 Affine Räume und affine Abbildungen Ein affiner Raum besteht aus zwei Mengen P und G zusammen mit einer Relation der Inzidenz zwischen ihnen.
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 06.12.2013 Alexander Lytchak 1 / 16 Wiederholung Ist V ein Vektorraum, so heißen Abbildungen T v : V V der Form w w
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 06.12.2013 Alexander Lytchak 1 / 16 Wiederholung Ist V ein Vektorraum, so heißen Abbildungen T v : V V der Form w w
Kapitel II Lineare Algebra und analytische Geometrie Stand 9. Januar 2011
 Kapitel II Lineare Algebra und analytische Geometrie Stand 9 Januar 011 7 Bewegungen Wir betrachten jetzt Affinitäten in n unter Einbeziehung der Abstandsmessung Die Abstandsmessung in n beruht auf einem
Kapitel II Lineare Algebra und analytische Geometrie Stand 9 Januar 011 7 Bewegungen Wir betrachten jetzt Affinitäten in n unter Einbeziehung der Abstandsmessung Die Abstandsmessung in n beruht auf einem
4.3 Bilinearformen. 312 LinAlg II Version Juni 2006 c Rudolf Scharlau
 312 LinAlg II Version 0 20. Juni 2006 c Rudolf Scharlau 4.3 Bilinearformen Bilinearformen wurden bereits im Abschnitt 2.8 eingeführt; siehe die Definition 2.8.1. Die dort behandelten Skalarprodukte sind
312 LinAlg II Version 0 20. Juni 2006 c Rudolf Scharlau 4.3 Bilinearformen Bilinearformen wurden bereits im Abschnitt 2.8 eingeführt; siehe die Definition 2.8.1. Die dort behandelten Skalarprodukte sind
6. Normale Abbildungen
 SKALARPRODUKE 1 6 Normale Abbildungen 61 Erinnerung Sei V ein n-dimensionaler prä-hilbertraum, also ein n-dimensionaler Vektorraum über K (R oder C) versehen auch mit einer Skalarprodukt, ra K Die euklidische
SKALARPRODUKE 1 6 Normale Abbildungen 61 Erinnerung Sei V ein n-dimensionaler prä-hilbertraum, also ein n-dimensionaler Vektorraum über K (R oder C) versehen auch mit einer Skalarprodukt, ra K Die euklidische
MAA = MAB + B AA = B CA + CAA BA A Nun sehen wir mit Proposition 10.7 aus dem Skript, dass A M AB gelten muss.
 1. Konvexität in der absoluten Ebene In einem Dreieck in der Euklidischen Ebene hat die Strecke zwischen zwei Seitenmittelpunkten die halbe Länge der dritten Seite. In der absoluten Ebene hat man eine
1. Konvexität in der absoluten Ebene In einem Dreieck in der Euklidischen Ebene hat die Strecke zwischen zwei Seitenmittelpunkten die halbe Länge der dritten Seite. In der absoluten Ebene hat man eine
Körper- und Galoistheorie
 Prof. Dr. H. Brenner Osnabrück SS 2011 Körper- und Galoistheorie Vorlesung 8 Erzeugte Algebra und erzeugter Körper Satz 8.1. Sei K L eine Körpererweiterung und sei f L ein algebraisches Element. Dann ist
Prof. Dr. H. Brenner Osnabrück SS 2011 Körper- und Galoistheorie Vorlesung 8 Erzeugte Algebra und erzeugter Körper Satz 8.1. Sei K L eine Körpererweiterung und sei f L ein algebraisches Element. Dann ist
Modulteilprüfung Geometrie (BaM-GS), Probeklausur
, Probeklausur") HRZ-Benutzername: Modulteilprüfung Geometrie (BaM-GS), Probeklausur Dr. Patrik Hubschmid // SoSe 2013, 4. Juli 2013 Kontrollieren Sie, ob Sie alle Blätter (7 einschließlich zweier Deckblätter) erhalten
HRZ-Benutzername: Modulteilprüfung Geometrie (BaM-GS), Probeklausur Dr. Patrik Hubschmid // SoSe 2013, 4. Juli 2013 Kontrollieren Sie, ob Sie alle Blätter (7 einschließlich zweier Deckblätter) erhalten
2 Spiegelungen. d(f(p), f(q)) = d(p, q) für alle p, q R n
, f(q)) = d(p, q) für alle p, q R n") 2 Siegelungen Definition: f : R n R n heißt Bewegung (Isometrie), wenn f Abstände erhält, dh wenn d(f(), f(q)) = d(, q) für alle, q R n Kaitel IV, Satz 32: f ist genau dann eine Bewegung, wenn es eine
2 Siegelungen Definition: f : R n R n heißt Bewegung (Isometrie), wenn f Abstände erhält, dh wenn d(f(), f(q)) = d(, q) für alle, q R n Kaitel IV, Satz 32: f ist genau dann eine Bewegung, wenn es eine
Lineare Algebra und analytische Geometrie II
 Prof. Dr. H. Brenner Osnabrück SS 2016 Lineare Algebra und analytische Geometrie II Vorlesung 36 Dreiecke In dieser und der nächsten Vorlesung stehen Dreiecke im Mittelpunkt. Unter einem Dreieck verstehen
Prof. Dr. H. Brenner Osnabrück SS 2016 Lineare Algebra und analytische Geometrie II Vorlesung 36 Dreiecke In dieser und der nächsten Vorlesung stehen Dreiecke im Mittelpunkt. Unter einem Dreieck verstehen
1.2 Gitter: Grundlegende Konzepte
 Gitter und Codes c Rudolf Scharlau 16. April 2009 5 1.2 Gitter: Grundlegende Konzepte Es sei V ein n-dimensionaler R-Vektorraum. Auf V sei ein Skalarprodukt gegeben, dessen Werte mit x, y R, dabei x, y
Gitter und Codes c Rudolf Scharlau 16. April 2009 5 1.2 Gitter: Grundlegende Konzepte Es sei V ein n-dimensionaler R-Vektorraum. Auf V sei ein Skalarprodukt gegeben, dessen Werte mit x, y R, dabei x, y
Hinweis: Die Klausur Lineare Algebra 2 für die Fachrichtung Informatik besteht aus den Aufgaben 2.1 bis 2.4.
 Hinweis: Die Klausur Lineare Algebra 2 für die Fachrichtung Informatik besteht aus den Aufgaben 2.1 bis 2.4. Aufgabe 2.1 (8 Punkte) Es sei K ein Körper, n N, V ein 2n-dimensionaler K -Vektorraum und U
Hinweis: Die Klausur Lineare Algebra 2 für die Fachrichtung Informatik besteht aus den Aufgaben 2.1 bis 2.4. Aufgabe 2.1 (8 Punkte) Es sei K ein Körper, n N, V ein 2n-dimensionaler K -Vektorraum und U
HM II Tutorium 1. Lucas Kunz. 24. April 2018
 HM II Tutorium 1 Lucas Kunz 24. April 2018 Inhaltsverzeichnis 1 Theorie 2 1.1 Körper...................................... 2 1.2 Gruppen..................................... 2 1.3 Vektorraum...................................
HM II Tutorium 1 Lucas Kunz 24. April 2018 Inhaltsverzeichnis 1 Theorie 2 1.1 Körper...................................... 2 1.2 Gruppen..................................... 2 1.3 Vektorraum...................................
Grundlegende Definitionen aus HM I
 Grundlegende Definitionen aus HM I Lucas Kunz. März 206 Inhaltsverzeichnis Vektorraum 2 2 Untervektorraum 2 Lineare Abhängigkeit 2 4 Lineare Hülle und Basis 5 Skalarprodukt 6 Norm 7 Lineare Abbildungen
Grundlegende Definitionen aus HM I Lucas Kunz. März 206 Inhaltsverzeichnis Vektorraum 2 2 Untervektorraum 2 Lineare Abhängigkeit 2 4 Lineare Hülle und Basis 5 Skalarprodukt 6 Norm 7 Lineare Abbildungen
Vektorräume und Lineare Abbildungen
 Vektorräume und Lineare Abbildungen Patricia Doll, Selmar Binder, Lukas Bischoff, Claude Denier ETHZ D-MATL SS 07 11.04.2007 1 Vektorräume 1.1 Definition des Vektorraumes (VR) 1.1.1 Grundoperationen Um
Vektorräume und Lineare Abbildungen Patricia Doll, Selmar Binder, Lukas Bischoff, Claude Denier ETHZ D-MATL SS 07 11.04.2007 1 Vektorräume 1.1 Definition des Vektorraumes (VR) 1.1.1 Grundoperationen Um
5 Analytische Geometrie
 5 Analytische Geometrie Die Grundidee der analytischen Geometrie ist es, geometrische Objekte in Räumen mittels linearer Algebra zu beschreiben 51 Affine Räume Definition 511 Ein affiner Raum (AR) über
5 Analytische Geometrie Die Grundidee der analytischen Geometrie ist es, geometrische Objekte in Räumen mittels linearer Algebra zu beschreiben 51 Affine Räume Definition 511 Ein affiner Raum (AR) über
Lineare Algebra I 14. Tutorium Lineare Abbildungen und Matrizen
 Lineare Algebra I 4 Tutorium Lineare Abbildungen und Matrizen Fachbereich Mathematik WS / Prof Dr Kollross 7 Februar Dr Le Roux Dipl-Math Susanne Kürsten Aufgaben Aufgabe G (Bewegungen im ) Als Bewegung
Lineare Algebra I 4 Tutorium Lineare Abbildungen und Matrizen Fachbereich Mathematik WS / Prof Dr Kollross 7 Februar Dr Le Roux Dipl-Math Susanne Kürsten Aufgaben Aufgabe G (Bewegungen im ) Als Bewegung
a b Q = b a 0 ) existiert ein Element p Q, so dass gilt: q 1 q 2 = 2 b 1 b 2 a 1 b 2 a 2 b 1 a 1 a 2 b 1 b 2 a 1 b 2 a 2 b 1 a b p = 1 det(q) C 2 2,
 existiert ein Element p Q, so dass gilt: q 1 q 2 = 2 b 1 b 2 a 1 b 2 a 2 b 1 a 1 a 2 b 1 b 2 a 1 b 2 a 2 b 1 a b p = 1 det(q) C 2 2,") Aufgabe I Es sei Q die folgende Teilmenge von C 2 2 : { ( ) a b Q a, b C b a Hier bezeichnet der Querstrich die komplexe Konjugation Zeigen Sie: (a) Mit den üblichen Verknüpfungen + und für Matrizen ist
Aufgabe I Es sei Q die folgende Teilmenge von C 2 2 : { ( ) a b Q a, b C b a Hier bezeichnet der Querstrich die komplexe Konjugation Zeigen Sie: (a) Mit den üblichen Verknüpfungen + und für Matrizen ist
Geometrie Modul 4b WS 2015/16 Mi HS 1
 Geometrie Modul 4b WS 2015/16 Mi 10-12 HS 1 Benötigte Materialien: Geometrieheft DIN-A-4 blanco weiß, quadratisches Faltpapier/Zettelblock, rundes Faltpapier; Zirkel, Geometriedreieck, Klebstoff, Schere
Geometrie Modul 4b WS 2015/16 Mi 10-12 HS 1 Benötigte Materialien: Geometrieheft DIN-A-4 blanco weiß, quadratisches Faltpapier/Zettelblock, rundes Faltpapier; Zirkel, Geometriedreieck, Klebstoff, Schere
Geometrische Abbildungen der Ebene
 Geometrische Abbildungen der Ebene Dr. Elke Warmuth Sommersemester 2018 1 / 29 Bezeichnungen Kongruenzabbildungen Spiegelungen Klassifikation aller Kongruenzabbildungen 2 / 29 Abbildung, Funktion, Transformation
Geometrische Abbildungen der Ebene Dr. Elke Warmuth Sommersemester 2018 1 / 29 Bezeichnungen Kongruenzabbildungen Spiegelungen Klassifikation aller Kongruenzabbildungen 2 / 29 Abbildung, Funktion, Transformation
4.3 Affine Punkträume
 4.3. AFFINE PUNKTRÄUME 185 4.3 Affine Punkträume Es wird jetzt der Übergang von der linearen Algebra zur analytischen Geometrie beschrieben. 4.3.1 Definition (affiner Punktraum) Sei V ein K-Vektorraum,
4.3. AFFINE PUNKTRÄUME 185 4.3 Affine Punkträume Es wird jetzt der Übergang von der linearen Algebra zur analytischen Geometrie beschrieben. 4.3.1 Definition (affiner Punktraum) Sei V ein K-Vektorraum,
GEOMETRIE (4a) Kurzskript
 Kurzskript") GEOMETRIE (4a) Kurzskript Dieses Kurzskript ist vor allem eine Sammlung von Sätzen und Definitionen und sollte ausdrücklich nur mit weiteren Erläuterungen in der Veranstaltung genutzt werden. Fehler sind
GEOMETRIE (4a) Kurzskript Dieses Kurzskript ist vor allem eine Sammlung von Sätzen und Definitionen und sollte ausdrücklich nur mit weiteren Erläuterungen in der Veranstaltung genutzt werden. Fehler sind
Klausurenkurs zum Staatsexamen (WS 2012/13): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS /3): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 a)
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS /3): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 a)
Zusammenfassung Analysis 2
 Zusammenfassung Analysis 2 1.2 Metrische Räume Die Grundlage metrischer Räume bildet der Begriff des Abstandes (Metrik). Definition 1.1 Ein metrischer Raum ist ein Paar (X, d), bestehend aus einer Menge
Zusammenfassung Analysis 2 1.2 Metrische Räume Die Grundlage metrischer Räume bildet der Begriff des Abstandes (Metrik). Definition 1.1 Ein metrischer Raum ist ein Paar (X, d), bestehend aus einer Menge
Algebra & Zahlentheorie. Letztes Tutorium. David Müßig. muessig[at]mi.fu-berlin.de WiSe 12/13
![Algebra & Zahlentheorie. Letztes Tutorium. David Müßig. muessig[at]mi.fu-berlin.de WiSe 12/13](/thumbs/64/50579031.jpg "Algebra & Zahlentheorie. Letztes Tutorium. David Müßig. muessig[at]mi.fu-berlin.de WiSe 12/13") Letztes Tutorium David Müßig muessig[at]mi.fu-berlin.de http://page.mi.fu-berlin.de/def/tutorium/ WiSe 12/13 1 Beispiele 1.1 e-te Wurzeln in Z/nZ Bemerkung. Dies ist ein Beispiel zur Bestimmung von e x
Letztes Tutorium David Müßig muessig[at]mi.fu-berlin.de http://page.mi.fu-berlin.de/def/tutorium/ WiSe 12/13 1 Beispiele 1.1 e-te Wurzeln in Z/nZ Bemerkung. Dies ist ein Beispiel zur Bestimmung von e x
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.43 2018/05/15 16:07:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel Am Ende der letzten Sitzung hatten wir begonnen zwei weitere Aussagen über Winkel zu beweisen,
$Id: vektor.tex,v 1.43 2018/05/15 16:07:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel Am Ende der letzten Sitzung hatten wir begonnen zwei weitere Aussagen über Winkel zu beweisen,
1.1 Geradenspiegelungen
 1.1 Geradenspiegelungen 1.1.1 Eigenschaften Definition 1.1 Eine Abbildung der Ebene ist eine Vorschrift, die jedem Punkt P der Ebene einen Bildpunkt P zuordnet. Beispiel 1.1 Zentrische Streckung mit Zentrum
1.1 Geradenspiegelungen 1.1.1 Eigenschaften Definition 1.1 Eine Abbildung der Ebene ist eine Vorschrift, die jedem Punkt P der Ebene einen Bildpunkt P zuordnet. Beispiel 1.1 Zentrische Streckung mit Zentrum
Lösungsvorschläge für die Geometrie-Klausur vom 28.7.
 Lösungsvorschläge für die Geometrie-Klausur vom 28.7. Aufgabe 1: (a) Die beiden Punkte liegen offensichtlich auf der hyperbolischen Geraden g = {z H R(z) = 1}. Die beiden idealen Punkte sind a = 1, b =.
Lösungsvorschläge für die Geometrie-Klausur vom 28.7. Aufgabe 1: (a) Die beiden Punkte liegen offensichtlich auf der hyperbolischen Geraden g = {z H R(z) = 1}. Die beiden idealen Punkte sind a = 1, b =.
Mathematik für Anwender II
 Prof Dr H Brenner Osnabrück SS 22 Mathematik für Anwender II Vorlesung Euklidische Vektorräume Im Anschauungsraum kann man nicht nur Vektoren addieren und skalieren, sondern ein Vektor hat auch eine Länge,
Prof Dr H Brenner Osnabrück SS 22 Mathematik für Anwender II Vorlesung Euklidische Vektorräume Im Anschauungsraum kann man nicht nur Vektoren addieren und skalieren, sondern ein Vektor hat auch eine Länge,
Aufgabe I.1 (4 Punkte) Gegeben seien die Matrix H := und die Menge L := {A R 4 4 A HA = H} Zeigen Sie:
 Gegeben seien die Matrix H := und die Menge L := {A R 4 4 A HA = H} Zeigen Sie:") Aufgabe I (4 Punkte Gegeben seien die Matrix und die Menge Zeigen Sie: H := L := {A R 4 4 A HA = H} a L ist bezüglich der Matrizenmultiplikation eine Gruppe b Die Matrizen der Form ( E O, O B wobei E R
Aufgabe I (4 Punkte Gegeben seien die Matrix und die Menge Zeigen Sie: H := L := {A R 4 4 A HA = H} a L ist bezüglich der Matrizenmultiplikation eine Gruppe b Die Matrizen der Form ( E O, O B wobei E R
Serie 3: Gruppen, Ringe und Körper
 D-MATH Lineare Algebra I HS 2017 Dr. Meike Akveld Serie 3: Gruppen, Ringe und Körper 1. Im Folgenden sei n N und Z/nZ bezeichne die Menge der Äquivalenzklassen von Z bezüglich der Relation: k n l n k l
D-MATH Lineare Algebra I HS 2017 Dr. Meike Akveld Serie 3: Gruppen, Ringe und Körper 1. Im Folgenden sei n N und Z/nZ bezeichne die Menge der Äquivalenzklassen von Z bezüglich der Relation: k n l n k l
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 29.11.2013 Alexander Lytchak 1 / 13 Wiederholung Der Rang einer linearen Abbildung ist gleich dem Spaltenrang der darstellenden
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 29.11.2013 Alexander Lytchak 1 / 13 Wiederholung Der Rang einer linearen Abbildung ist gleich dem Spaltenrang der darstellenden
2. Dezember Lineare Algebra II. Christian Ebert & Fritz Hamm. Skalarprodukt, Norm, Metrik. Matrizen. Lineare Abbildungen
 Algebra und Algebra 2. Dezember 2011 Übersicht Algebra und Algebra I Gruppen & Körper Vektorräume, Basis & Dimension Algebra Norm & Metrik Abbildung & Algebra I Eigenwerte, Eigenwertzerlegung Singulärwertzerlegung
Algebra und Algebra 2. Dezember 2011 Übersicht Algebra und Algebra I Gruppen & Körper Vektorräume, Basis & Dimension Algebra Norm & Metrik Abbildung & Algebra I Eigenwerte, Eigenwertzerlegung Singulärwertzerlegung
Strahlensätze und Ähnliches
 Strahlensätze und Ähnliches Dr. Elke Warmuth Sommersemester 2018 1 / 27 Zentrische Streckung Strahlensätze Ähnliche Figuren 2 / 27 Was ist hier passiert? 3 / 27 Zentrische Streckung mit Streckungszentrum
Strahlensätze und Ähnliches Dr. Elke Warmuth Sommersemester 2018 1 / 27 Zentrische Streckung Strahlensätze Ähnliche Figuren 2 / 27 Was ist hier passiert? 3 / 27 Zentrische Streckung mit Streckungszentrum
1 Eingebettete Untermannigfaltigkeiten des R d
 $Id: unter.tex,v 1.2 2014/04/14 13:19:35 hk Exp hk $ 1 Eingebettete Untermannigfaltigkeiten des R d In diesem einleitenden Paragraphen wollen wir Untermannigfaltigkeiten des R d studieren, diese sind die
$Id: unter.tex,v 1.2 2014/04/14 13:19:35 hk Exp hk $ 1 Eingebettete Untermannigfaltigkeiten des R d In diesem einleitenden Paragraphen wollen wir Untermannigfaltigkeiten des R d studieren, diese sind die
Vorlesung 27. Der projektive Raum. Wir werden den projektiven Raum zunehmend mit mehr Strukturen versehen.
 Vorlesung 27 Der projektive Raum Definition 1. Sei K ein Körper. Der projektive n-dimensionale Raum P n K besteht aus allen Geraden des A n+1 K durch den Nullpunkt, wobei diese Geraden als Punkte aufgefasst
Vorlesung 27 Der projektive Raum Definition 1. Sei K ein Körper. Der projektive n-dimensionale Raum P n K besteht aus allen Geraden des A n+1 K durch den Nullpunkt, wobei diese Geraden als Punkte aufgefasst
Satz 2.8 V sei ein endlichdimensionaler euklidischer Vektorraum. Für jeden Unterraum
 Orthogonalität 123 Dienstag, 27. April 04 Satz 2.8 V sei ein endlichdimensionaler euklidischer Vektorraum. Für jeden Unterraum U von V gilt dann (a) U + U = V, U U = {0}, U, U = 0. (b) (U ) = U. Wir sagen
Orthogonalität 123 Dienstag, 27. April 04 Satz 2.8 V sei ein endlichdimensionaler euklidischer Vektorraum. Für jeden Unterraum U von V gilt dann (a) U + U = V, U U = {0}, U, U = 0. (b) (U ) = U. Wir sagen
Geometrie. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 5.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 5.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Geometrie 5.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 5.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren Weg.
 30 Jetzt soll der Begriff der Kongruenz bzw. Euklids vage Vorstellung vom Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren
30 Jetzt soll der Begriff der Kongruenz bzw. Euklids vage Vorstellung vom Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren
Vorlesung Winter 2009/2010 Elementare Geometrie
 Vorlesung Winter 2009/2010 Elementare Geometrie 1 Homothetien Es sei Z E ein Punkt der Ebene. Es sei λ 0 eine reelle Zahl. Die zentrale Homothetie mit dem Zentrum Z und dem Streckungsfaktor λ ist folgende
Vorlesung Winter 2009/2010 Elementare Geometrie 1 Homothetien Es sei Z E ein Punkt der Ebene. Es sei λ 0 eine reelle Zahl. Die zentrale Homothetie mit dem Zentrum Z und dem Streckungsfaktor λ ist folgende
Mathematische Grundlagen der Computerlinguistik Algebren
 Mathematische Grundlagen der Computerlinguistik Algebren Dozentin: Wiebke Petersen 5. Foliensatz Wiebke Petersen math. Grundlagen 116 Algebren (algebraische Strukturen) Eine Algebra A ist eine Menge A
Mathematische Grundlagen der Computerlinguistik Algebren Dozentin: Wiebke Petersen 5. Foliensatz Wiebke Petersen math. Grundlagen 116 Algebren (algebraische Strukturen) Eine Algebra A ist eine Menge A
Der n-dimensionale Raum
 Der n-dimensionale Raum Mittels R kann nur eine Größe beschrieben werden. Um den Ort eines Teilchens im Raum festzulegen, werden schon drei Größen benötigt. Interessiert man sich für den Bewegungszustand
Der n-dimensionale Raum Mittels R kann nur eine Größe beschrieben werden. Um den Ort eines Teilchens im Raum festzulegen, werden schon drei Größen benötigt. Interessiert man sich für den Bewegungszustand
D-Math/Phys Lineare Algebra II FS 2017 Dr. Meike Akveld. Clicker Fragen
 D-Math/Phys Lineare Algebra II FS 2017 Dr. Meike Akveld Clicker Fragen Frage 1 Wenn eine reelle Matrix einen Eigenvektor hat, so hat es unendlich viele Eigenvektoren Sei u K n einen Eigenvektor von A M
D-Math/Phys Lineare Algebra II FS 2017 Dr. Meike Akveld Clicker Fragen Frage 1 Wenn eine reelle Matrix einen Eigenvektor hat, so hat es unendlich viele Eigenvektoren Sei u K n einen Eigenvektor von A M
Lineare Algebra und analytische Geometrie II
 Prof. Dr. H. Brenner Osnabrück SS 206 Lineare Algebra und analytische Geometrie II Vorlesung 33 Das Kreuzprodukt Eine Besonderheit im R 3 ist das sogenannte Kreuzprodukt, das zu zwei gegebenen Vektoren
Prof. Dr. H. Brenner Osnabrück SS 206 Lineare Algebra und analytische Geometrie II Vorlesung 33 Das Kreuzprodukt Eine Besonderheit im R 3 ist das sogenannte Kreuzprodukt, das zu zwei gegebenen Vektoren
1. Winkel (Kapitel 3)
") 1. Winkel (Kapitel 3) 1.1 Winkel Einführung 1.2 Winkel an Geraden bjak 1 1.3 Winkel am Dreieck bjak 2 1.4 Winkel am Kreis bjak 3 bjak 4 2. Dreiecke (Kapitel 3) 2.1 Linien am Dreieck bjak 5 2.2 Flächeninhalt
1. Winkel (Kapitel 3) 1.1 Winkel Einführung 1.2 Winkel an Geraden bjak 1 1.3 Winkel am Dreieck bjak 2 1.4 Winkel am Kreis bjak 3 bjak 4 2. Dreiecke (Kapitel 3) 2.1 Linien am Dreieck bjak 5 2.2 Flächeninhalt
Vorlesung 6: Gruppen und Homomorphismen
 Vorlesung 6: Gruppen und Homomorphismen Gabriele Link 11.11.2013 Gabriele Link Vorlesung 6: Gruppen und Homomorphismen 1 Erinnerung: Verknüpfung Gegeben sei eine Menge M. Eine (innere) Verknüpfung auf
Vorlesung 6: Gruppen und Homomorphismen Gabriele Link 11.11.2013 Gabriele Link Vorlesung 6: Gruppen und Homomorphismen 1 Erinnerung: Verknüpfung Gegeben sei eine Menge M. Eine (innere) Verknüpfung auf
3 Lineare Abbildungen und Matrizen
 3 Lineare Abbildungen und Matrizen Definition 3.1. Es seien V und W zwei Vektorräume über demselben Zahlkörper k. Eine Abbildung heisst linear, falls gilt i) [ λ k ] [ v V ] [ f (λ v) = λ f ( v) ] ii)
3 Lineare Abbildungen und Matrizen Definition 3.1. Es seien V und W zwei Vektorräume über demselben Zahlkörper k. Eine Abbildung heisst linear, falls gilt i) [ λ k ] [ v V ] [ f (λ v) = λ f ( v) ] ii)
Musterlösung zur Klausur Lineare Algebra II für Lehramt 30.07.2012
 Musterlösung zur Klausur Lineare Algebra II für Lehramt 30.07.0 Aufgabe : Entscheiden Sie in dieser Aufgabe, ob die Aussagen wahr oder falsch sind. Begründungen sind nicht erforderlich. Ein korrekt gesetztes
Musterlösung zur Klausur Lineare Algebra II für Lehramt 30.07.0 Aufgabe : Entscheiden Sie in dieser Aufgabe, ob die Aussagen wahr oder falsch sind. Begründungen sind nicht erforderlich. Ein korrekt gesetztes
Invariantentheorie. Vorlesung 2. Gruppenoperationen
 Prof. Dr. H. Brenner Osnabrück WS 2012/2013 Invariantentheorie Vorlesung 2 Gruppenoperationen In den beiden Beispielen der ersten Vorlesung operiert eine Gruppe auf einer Menge: Die Kongruenzabbildungen
Prof. Dr. H. Brenner Osnabrück WS 2012/2013 Invariantentheorie Vorlesung 2 Gruppenoperationen In den beiden Beispielen der ersten Vorlesung operiert eine Gruppe auf einer Menge: Die Kongruenzabbildungen
Symmetrische Figuren von Prof. Dr. Frank
 Symmetrische Figuren von Prof. Dr. Frank Eckhard Großmann November 3, 2009 1 Mathematische Formeln und Darstellungen vorweggegriffen Dieses Kapitel soll nochmal alle notwendigen mathematischen Grundlagen
Symmetrische Figuren von Prof. Dr. Frank Eckhard Großmann November 3, 2009 1 Mathematische Formeln und Darstellungen vorweggegriffen Dieses Kapitel soll nochmal alle notwendigen mathematischen Grundlagen
Prüfung Lineare Algebra Sei V ein n-dimensionaler euklidischer Raum. Welche der folgenden Aussagen ist wahr?
 1. Sei V ein n-dimensionaler euklidischer Raum. Welche der folgenden Aussagen ist wahr? A. Wenn n = 3 ist, sind mindestens zwei der drei Euler-Winkel einer Drehung kleiner oder gleich π. B. Wenn n = 2
1. Sei V ein n-dimensionaler euklidischer Raum. Welche der folgenden Aussagen ist wahr? A. Wenn n = 3 ist, sind mindestens zwei der drei Euler-Winkel einer Drehung kleiner oder gleich π. B. Wenn n = 2
Klausur zur Mathematik II (Modul: Lineare Algebra II)
") Technische Universität Hamburg-Harburg Institut für Mathematik Prof. Dr. Wolfgang Mackens Wintersemester 0/04 Klausur zur Mathematik II (Modul: Lineare Algebra II) 05.0.04 Sie haben 60 Minuten Zeit zum
Technische Universität Hamburg-Harburg Institut für Mathematik Prof. Dr. Wolfgang Mackens Wintersemester 0/04 Klausur zur Mathematik II (Modul: Lineare Algebra II) 05.0.04 Sie haben 60 Minuten Zeit zum
Modulteilprüfung Geometrie (BaM-GS), Probeklausur
, Probeklausur") HRZ-Benutzername: Modulteilprüfung Geometrie (BaM-GS), Probeklausur Dr. Patrik Hubschmid // SoSe 2013, 4. Juli 2013 Kontrollieren Sie, ob Sie alle Blätter (8 einschlieÿlich zweier Deckblätter) erhalten
HRZ-Benutzername: Modulteilprüfung Geometrie (BaM-GS), Probeklausur Dr. Patrik Hubschmid // SoSe 2013, 4. Juli 2013 Kontrollieren Sie, ob Sie alle Blätter (8 einschlieÿlich zweier Deckblätter) erhalten
zur Modulprüfung zum Lehrerweiterbildungskurs Geometrie am
 Nachklausur zur Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 12.7.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden
Nachklausur zur Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 12.7.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden
Seminar Einführung in die Kunst mathematischer Ungleichungen
 Seminar Einführung in die Kunst mathematischer Ungleichungen Geometrie und die Summe von Quadraten Clara Brünn 25. April 2016 Inhaltsverzeichnis 1 Einleitung 2 1.1 Geometrie allgemein.................................
Seminar Einführung in die Kunst mathematischer Ungleichungen Geometrie und die Summe von Quadraten Clara Brünn 25. April 2016 Inhaltsverzeichnis 1 Einleitung 2 1.1 Geometrie allgemein.................................
1 Euklidische und unitäre Vektorräume
 1 Euklidische und unitäre Vektorräume In diesem Abschnitt betrachten wir reelle und komplexe Vektorräume mit Skalarprodukt. Dieses erlaubt uns die Länge eines Vektors zu definieren und (im Fall eines reellen
1 Euklidische und unitäre Vektorräume In diesem Abschnitt betrachten wir reelle und komplexe Vektorräume mit Skalarprodukt. Dieses erlaubt uns die Länge eines Vektors zu definieren und (im Fall eines reellen
V. Lineare Algebra. 35 Lineare Abbildungen und Matrizen. 156 V. Lineare Algebra
 156 V. Lineare Algebra V. Lineare Algebra 35. Lineare Abbildungen und Matrizen 156 36. Eigenwerte und Eigenvektoren 161 37. Hauptvektoren 165 38. Normen und Neumannsche Reihe 168 39. Numerische Anwendungen
156 V. Lineare Algebra V. Lineare Algebra 35. Lineare Abbildungen und Matrizen 156 36. Eigenwerte und Eigenvektoren 161 37. Hauptvektoren 165 38. Normen und Neumannsche Reihe 168 39. Numerische Anwendungen
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 03.12.2013 Alexander Lytchak 1 / 16 Wiederholung und Beispiele Der Spaltenrang einer Matrix ist gleich ihrem Zeilenrang.
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 03.12.2013 Alexander Lytchak 1 / 16 Wiederholung und Beispiele Der Spaltenrang einer Matrix ist gleich ihrem Zeilenrang.
4 Differenzierbarkeit einer konjugierten Funktion
 4 Differenzierbarkeit einer konjugierten Funktion (Eingereicht von Corinna Vits) 4.1 Differenzierbarkeit 1.Ordnung Theorem 4.1.1: Sei f ConvR n strikt konvex. Dann ist int dom und f ist stetig differenzierbar
4 Differenzierbarkeit einer konjugierten Funktion (Eingereicht von Corinna Vits) 4.1 Differenzierbarkeit 1.Ordnung Theorem 4.1.1: Sei f ConvR n strikt konvex. Dann ist int dom und f ist stetig differenzierbar
Elementare Geometrie Vorlesung 10
 Elementare Geometrie Vorlesung 10 Thomas Zink 24.5.2017 1.Kongruenz von Dreiecken Es sei E eine Ebene. Wir verstehen in dieser Vorlesung unter einem Dreieck eine Folge von drei Punkten ABC in E, die nicht
Elementare Geometrie Vorlesung 10 Thomas Zink 24.5.2017 1.Kongruenz von Dreiecken Es sei E eine Ebene. Wir verstehen in dieser Vorlesung unter einem Dreieck eine Folge von drei Punkten ABC in E, die nicht
Proseminar zur Linearen Algebra und Elementargeometrie
 Proseminar zur Linearen Algebra und Elementargeometrie Bewegungen der hyperbolischen Ebene Wintersemester 016/17 Markus Schulze markus.schulze@tu-dortmund.de Prof. Dr. L. Schwachhöfer Technische Universität
Proseminar zur Linearen Algebra und Elementargeometrie Bewegungen der hyperbolischen Ebene Wintersemester 016/17 Markus Schulze markus.schulze@tu-dortmund.de Prof. Dr. L. Schwachhöfer Technische Universität
6 Metrische Klassifikation der Quadriken
 6 Metrische Klassifikation der Quadriken A Wiederholung von Kap V, 5 Sei A = (a ij ) eine symmetrische n n Matrix. n x 1 q(x) := x t Ax = a ij x i x j, x =. i,j=1 ist dann ein quadratisches Polynom in
6 Metrische Klassifikation der Quadriken A Wiederholung von Kap V, 5 Sei A = (a ij ) eine symmetrische n n Matrix. n x 1 q(x) := x t Ax = a ij x i x j, x =. i,j=1 ist dann ein quadratisches Polynom in
Bild, Faser, Kern. Stefan Ruzika. 23. Mai Mathematisches Institut Universität Koblenz-Landau Campus Koblenz
 Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 23. Mai 2016 Stefan Ruzika 7: Bild, Faser, Kern 23. Mai 2016 1 / 11 Gliederung 1 Schulstoff 2 Körper 3 Vektorräume 4 Basis
Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 23. Mai 2016 Stefan Ruzika 7: Bild, Faser, Kern 23. Mai 2016 1 / 11 Gliederung 1 Schulstoff 2 Körper 3 Vektorräume 4 Basis
Ähnlichkeit. GEOMETRIE Kapitel 1 NProfil - Mittelstufe KZN. Ronald Balestra CH Zürich Name: Vorname:
 Ähnlichkeit GEOMETRIE Kapitel 1 NProfil - Mittelstufe KZN Ronald Balestra CH - 8046 Zürich www.ronaldbalestra.ch Name: Vorname: 6. März 2016 Inhaltsverzeichnis 1 Aehnlichkeit 1 1.1 Definition & Eigenschaften.....................
Ähnlichkeit GEOMETRIE Kapitel 1 NProfil - Mittelstufe KZN Ronald Balestra CH - 8046 Zürich www.ronaldbalestra.ch Name: Vorname: 6. März 2016 Inhaltsverzeichnis 1 Aehnlichkeit 1 1.1 Definition & Eigenschaften.....................