2.1. Konvexe Hülle in 2D
|
|
|
- Wilfried Maximilian Baumhauer
- vor 5 Jahren
- Abrufe
Transkript
1 Wir wollen die konvexe Hülle einer Menge von Punkten P = {p 1,..., p n } in der Ebene R 2 bestimmen. y y x x Def. 21: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar das Liniensegment pq in S liegt. p, q, S Def. 22: Die konvexe Hülle CH(S) einer Teilmenge S ist die kleinste konvexe Menge, die S enthält, d. h. CH(S) ist der Schritt aller S enthaltenden konvexen Mengen. F1
2 Als konvexe Hülle ergibt sich ein konvexes Polygon! Dieses wollen wir als Liste von Punkten aus P angeben, die die Eckpunkte von CH(P) im Uhrzeigersinn enthält. Leider ist unsere obige Definition der konvexen Hülle nicht wirklich hilfreich. Daher nutzen wir folgende Aussage über die Eckpunkte der konvexen Hülle. Satz 2.3: Die Kanten pq von CH(P) besitzen zwei Eckpunkte p, q, P und alle Punkte von P liegen rechts von pq. F2
3 F3


4 Dies liefert einen ersten Algorithmus F4
5 Bemerkungen: In Zeile 5 berechnen wir, ob ein Punkt rechts oder links einer Geraden liegt. Eine Implementierung könnte etwa über das Vektorprodukt erfolgen. Abstandsberechnung zu einer Geraden ist eine weiter Variante. Die Operation gelingt in jedem Fall in konstanter Zeit. Wichtig ist, dass man bei einer Implementierung hier vorsichtig ist, da Zeit und Effizienz verloren gehen können Bibliotheken benutzen! In Zeile 8 müssen die Segmente sortiert werden, so dass mit einem beliebigen Segment begonnen wird und dann das daran anschließende (gerichtete) Segment gefunden wird. O n 2 bzw O nlog n ergeben sich als Aufwand. Insgesamt ergeben sich n(n-1) Paare, die gegen n-2 Punkte getestet werden O n 3. Ferner liefert der letzte Schritt O n log n, also insgesamt O n 3. F5
6 Das ist sicher nicht akzeptabel für mehr als 1000 Punkte! Ferner gibt es weitere versteckte Probleme: (1) Wie behandeln wir Punkte, die auf einer Linie liegen? (2) Wie berücksichtigen wir, dass bei fast kollinearen Punkten Rundungsfehler Punkte auf die falsche Seite liegen oder gar keiner von drei Punkten p, q, r rechts von den anderen beiden liegt? F6
7 Zu (1): Wir müssen in Zeile 5 testen, ob r links von pq oder außerhalb der offenen Strecke pq liegt. (Mehrfache Punkte schließen wir hier aus.) Zu (2): Dieses Problem ist wirklich ernst, denn wenn keine Verbindung von p nach q existiert, wird unser Algorithmus in Zeile 8 nicht enden oder das Programm aussteigen. Unserem Algorithumus fehlt Robustheit. F7
8 Um zu einem verbesserten Algorithmus zu gelangen, nutzen wir einen inkrementellen Ansatz, indem wir einen Punkt nach dem anderen zu P hinzufügen und unsere konvexe Hülle jeweils anpassen, sofern nötig. Wir sortieren die Punkte nach aufsteigender x-koordinate und berechnen nur die obere Hälfte der konvexen Hülle. (Die untere Hälfte erhalten wir durch Sortieren nach absteigender x-koordinate). F8
9 Die Idee liegt darin, dass wir entlang der oberen Hülle in einem konvexen Polygon stets nach rechts abbiegen und somit eine Linksbiegung auf einen Fehler im letzten Teilstück der konvexen Hülle hinweist. Beachtet man, dass in diesem Fall auch vorherige Stücke zu testen sind, ist der Algorithmus fertig. F9
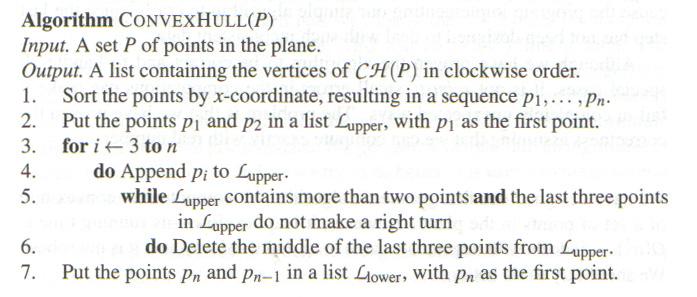
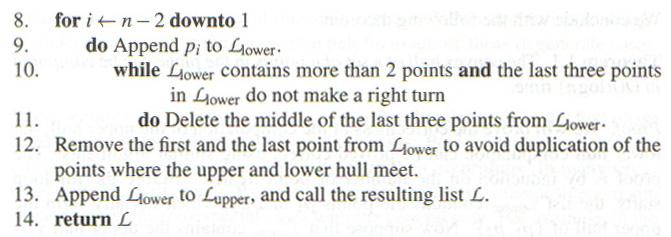
10 F10
11 Bemerkungen: Wenn zwei Punkte die gleiche x-koordinate haben, müssen wir sie anhand der y-koordinate sortieren. Wenn drei Punkte auf einer Geraden liegen, sollte der mittlere entfernt werden. Unser Test sollte also ermittlen, ob eine echte Rechtsdrehung erfolgt. Im Falle von Rundungsfehlern entfernen wir Punkte, die wir nicht entfernen sollten oder wir behalten Punkte, die entfernt werden sollten. Beides führt zu kleinen, vermutlich nicht sichtbaren Fehlern, aber unser Algorithmus arbeitet ordentlich! Das einzige ernste Problem bzgl. Robustheit sind sehr nahe Punkte, was wir durch Zusammenlegen dieser Punkte beseitigen können. F11
12 Theorem 24: Die konvexe Hülle einer Menge von n Punkten in der Ebene kann in Schritten berechnet werden. Beweis: (nur obere Hälfte) Bei zwei verschiedenen Punkten besteht die Hülle aus eben dieser. Sei also nun L die obere Hülle der Punkte { p 1,, p i 1 }. Wenn nun nach der while- Schleife die obere Hülle nur rechte Drehungen macht und die alte obere Hülle unterhalb der neuen liegt, kann ein Punkt nur in dem Bereich rechts von p i-1 oberhalb der neuen Hülle liegen. Da dort aber nur p i liegt und p i stets zur neuen Hülle gehört, gibt es solche Punkte nicht. O n log n Zur Komplexität: Sortieren erfordert O(n log n) Schritte. Die For-Schleife erfordert n Schritte. Die while-schleife löscht stets einen Punkt, wird also insgesamt maximal n-fach ausgeführt. Also erfordert die Hüllenberechnung O(n) Schritte für die obere Hälfte und analog für die untere Hälfte! QED F12
13 Als Regel zur Entwicklung geometrischer Algorithmen seien drei Phasen festgehalten. (1) Ignoriere zunächst alle degenerierten Fälle wie kollineare Punkte oder vertikale Segmente! (2) Betrachte die degenerierten Fälle und versuche sie in den Algorithmus zu integrieren! Zunächst wird man Fallunterscheidungen bevorzugen, aber oft lässt sich eine geschicktere Lösung finden, die viele Fälle vermeidet. (3) Implementiere den Algorithmus durch sorgfältiges Umsetzen der Basisoperationen! Rundungsfehlern gebührt hier große Aufmerksamkeit, da sie oft zu Frustrationen führen. Es ist nicht einfach sie zu vermeiden. Neben exakter Arithmetik hilft nur die genaue Untersuchung möglicher Fälle und eine genaue Spezifikation der Ergebnisse des Algorithmus, sowie der Anforderungen der Anwendungen. (Reicht es letztlich, die richtigen Pixel der konvexen Hüllen zu zeichnen?). F13
14 Literatur: Der Algorithmus stammt aus [A. M. Andrew. Another efficient algorithm for convex hulls in two dimensions. Inform. Process. Letters 9: ,1979] und basiert auf [R.L. Graham. An efficient algorithm for determining the convex hull of a finite set. Inform. Process. Letters 1: ,1972]. Es ist bekannt, dass n log n eine untere Schranke des Problems ist [A. C. Yao. A lower bound to finding convex hulls. J. ACM 28: , 1981]. Danach kann man dies verbessern, wenn man annimmt, dass in der Regel die Anzahl der Punkte h in der konvexen Hülle klein ist. [D.G. Kirkpatrick, R. Seidel. The ultimate planar convex hull algorithm? SIAM J. Computing 15: , 1986.] und die einfachere Variante [T.M.Y. Chan. Output-sensitive results on convex hulls, extreme points, and related problems. In Proc. 11 th Annual ACM Symp. Comput. Geom., 1995, ] erreichen O(n log h)! F14
Übersicht über Informatik und Softwaresystemtechnik WS 99/00, Prof. Dr. Andreas Schwill
 Konvexe Hülle Hierbei handelt es sich um ein klassisches Problem aus der Algorithmischen Geometrie, dem Teilgebiet der Informatik, in dem man für geometrische Probleme effiziente Algorithmen bestimmt.
Konvexe Hülle Hierbei handelt es sich um ein klassisches Problem aus der Algorithmischen Geometrie, dem Teilgebiet der Informatik, in dem man für geometrische Probleme effiziente Algorithmen bestimmt.
2.2. Schnitte von Liniensegmenten
 Wir wenden uns nun dem Problem (2) aus 1 zu. F15 Aus zwei Mengen S1, S2 von Liniensegmenten möchten wir alle Schnittpunkte der Segmente aus S1 mit denen aus S2 ermitteln. Wir legen fest, dass sich zwei
Wir wenden uns nun dem Problem (2) aus 1 zu. F15 Aus zwei Mengen S1, S2 von Liniensegmenten möchten wir alle Schnittpunkte der Segmente aus S1 mit denen aus S2 ermitteln. Wir legen fest, dass sich zwei
Einführung & Konvexe Hülle
 Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.04.2011 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu
Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.04.2011 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu
Algorithmische Geometrie 3. Schnitte von Liniensegmenten
 Algorithmische Geometrie 3. Schnitte von Liniensegmenten JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten 4.
Algorithmische Geometrie 3. Schnitte von Liniensegmenten JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten 4.
Durchschnitte und Sichtbarkeit
 Durchschnitte und Sichtbarkeit Elmar Langetepe University of Bonn Algorithmische Geometrie Durchschnitte 11.05.15 c Elmar Langetepe SS 15 1 Durchschnitt von Halbgeraden/Konvexe Hülle Algorithmische Geometrie
Durchschnitte und Sichtbarkeit Elmar Langetepe University of Bonn Algorithmische Geometrie Durchschnitte 11.05.15 c Elmar Langetepe SS 15 1 Durchschnitt von Halbgeraden/Konvexe Hülle Algorithmische Geometrie
M. Pester 29. Ein konvexes d-polytop ist eine begrenzte d-dimensionale polyedrale Menge. (d = 3 Polyeder, d = 2 Polygon)
") M. Pester 29 6 Konvexe Hülle 6.1 Begriffe Per Definition ist die konvexe Hülle für eine Menge S von lich vielen Punkten die kleinste konvexe Menge, die S enthölt (z.b. in der Ebene durch ein umspannes
M. Pester 29 6 Konvexe Hülle 6.1 Begriffe Per Definition ist die konvexe Hülle für eine Menge S von lich vielen Punkten die kleinste konvexe Menge, die S enthölt (z.b. in der Ebene durch ein umspannes
Hallo Welt! für Fortgeschrittene. Geometrie I. Philipp Erhardt. 19. Juli Philipp Erhardt Geometrie I 19. Juli / 27
 Hallo Welt! für Fortgeschrittene Geometrie I Philipp Erhardt 19. Juli 2011 Philipp Erhardt Geometrie I 19. Juli 2011 1 / 27 Gliederung 1 Grundlagen 2 CCW 3 Punkt-in-Polygon 4 Pick s Theorem 5 Konvexe Hülle
Hallo Welt! für Fortgeschrittene Geometrie I Philipp Erhardt 19. Juli 2011 Philipp Erhardt Geometrie I 19. Juli 2011 1 / 27 Gliederung 1 Grundlagen 2 CCW 3 Punkt-in-Polygon 4 Pick s Theorem 5 Konvexe Hülle
Voronoi-Diagramme. Dr. Martin Nöllenburg Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 29.05.2011 Das Postamt-Problem b(p, q) = {x R 2 : xp = xq } p q h(p, q) h(q, p) = {x :
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 29.05.2011 Das Postamt-Problem b(p, q) = {x R 2 : xp = xq } p q h(p, q) h(q, p) = {x :
Einführung & Konvexe Hülle
 Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 17.04.2012 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu
Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 17.04.2012 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu
Seminar. Algorithmische Geometrie
 Seminar Algorithmische Geometrie WS 2000/2001 Thema: Konvexe Hülle Mirko Dennler 21439 Inhaltsverzeichnis Konvexe Hülle 1. Problemstellung 3 2. GRAHAMS SCAN 4-5 3. JARVIS' MARCH 5-6 4. QUICK HULL 6-7 5.
Seminar Algorithmische Geometrie WS 2000/2001 Thema: Konvexe Hülle Mirko Dennler 21439 Inhaltsverzeichnis Konvexe Hülle 1. Problemstellung 3 2. GRAHAMS SCAN 4-5 3. JARVIS' MARCH 5-6 4. QUICK HULL 6-7 5.
Algorithmische Techniken für Geometrische Probleme
 Algorithmische Techniken für Geometrische Probleme Berthold Vöcking 14. Juni 2007 Inhaltsverzeichnis 1 Die Sweepline-Technik 2 1.1 Schnitte orthogonaler Liniensegmente............... 2 1.2 Schnitte beliebiger
Algorithmische Techniken für Geometrische Probleme Berthold Vöcking 14. Juni 2007 Inhaltsverzeichnis 1 Die Sweepline-Technik 2 1.1 Schnitte orthogonaler Liniensegmente............... 2 1.2 Schnitte beliebiger
Vorlesung Algorithmische Geometrie Konvexe Hülle im R 3
 Vorlesung Algorithmische Geometrie Konvexe Hülle im R 3 LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Andreas Gemsa 26.06.2012 Prüfung! Termine: 20. Juli 27.
Vorlesung Algorithmische Geometrie Konvexe Hülle im R 3 LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Andreas Gemsa 26.06.2012 Prüfung! Termine: 20. Juli 27.
Es sei P ein einfaches Polygon in der Ebene; P habe n Ecken. Hilfssatz: Zu jedem einfachen Polygon mit mehr als 3 Ecken existiert eine Diagonale.
 6. Polygontriangulierung: Wie bewacht man eine Kunstgalerie? 6.1. Grundlegendes zu Polygonen Es sei P ein einfaches Polygon in der Ebene; P habe n Ecken. Definition: Hilfssatz: Zu jedem einfachen Polygon
6. Polygontriangulierung: Wie bewacht man eine Kunstgalerie? 6.1. Grundlegendes zu Polygonen Es sei P ein einfaches Polygon in der Ebene; P habe n Ecken. Definition: Hilfssatz: Zu jedem einfachen Polygon
Voronoi-Diagramme INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK. Dr. Martin Nöllenburg Vorlesung Algorithmische Geometrie
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 03.06.2014 1 Das Postamt-Problem b(p, q) = {x 2 R 2 : xp = xq } p q h(p, q) h(q, p) = {x
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 03.06.2014 1 Das Postamt-Problem b(p, q) = {x 2 R 2 : xp = xq } p q h(p, q) h(q, p) = {x
Füllen von Primitiven
 Füllen von Primitiven Basisproblem der 2D-Graphik Anwendung: füllen beliebiger Flächen (Polygone, Freiformkurven) Darstellung von Buchstaben dicke Primitive (Linien, Kreise, Kurven), Teilproblem in der
Füllen von Primitiven Basisproblem der 2D-Graphik Anwendung: füllen beliebiger Flächen (Polygone, Freiformkurven) Darstellung von Buchstaben dicke Primitive (Linien, Kreise, Kurven), Teilproblem in der
Einführung & Konvexe Hülle
 Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 17.04.2012 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu
Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 17.04.2012 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu
Begriffsklärung: Dominanz
 Einführung Begriffsklärung: Dominanz Gegeben: d-dimensionaler Raum, jeder Punkt p im Raum hat d Attribute: (p 1,,p d ) Definition Dominanz: 1 i d : p i p i und 1 i d : p i < p i Begriffsklärung: Dominanz
Einführung Begriffsklärung: Dominanz Gegeben: d-dimensionaler Raum, jeder Punkt p im Raum hat d Attribute: (p 1,,p d ) Definition Dominanz: 1 i d : p i p i und 1 i d : p i < p i Begriffsklärung: Dominanz
2.1. Konvexe Hülle in 2D
 2.1. Konvexe Hülle in 2D Wir wollen die konvexe Hülle einer Menge in der Ebene bestimmen. Def. 2.1: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar p, q S das Liniensegment pq in S liegt. Def.
2.1. Konvexe Hülle in 2D Wir wollen die konvexe Hülle einer Menge in der Ebene bestimmen. Def. 2.1: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar p, q S das Liniensegment pq in S liegt. Def.
2.1. Konvexe Hülle in 2D
 2.1. Konvexe Hülle in 2D Wir wollen die konvexe Hülle einer Menge in der Ebene bestimmen. Def. 2.1: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar p, q S das Liniensegment pq in S liegt. Def.
2.1. Konvexe Hülle in 2D Wir wollen die konvexe Hülle einer Menge in der Ebene bestimmen. Def. 2.1: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar p, q S das Liniensegment pq in S liegt. Def.
Beweis: Annahme: T (n) c n, wobei c = c(m) konstant ist. Die Annahme ist ok, falls T (n)
 c n, wobei c = c(m) konstant ist. Die Annahme ist ok, falls T (n)") Beweis: Annahme: T (n) c n, wobei c = c(m) konstant ist. Die Annahme ist ok, falls T (n) ( ( ) n 3 T + T m ) 4 n n 3 c + m 4 n c + n n + C m + cn; dies gilt, falls m 2 n m C m + n 2 (bis auf, ) c m + 3
Beweis: Annahme: T (n) c n, wobei c = c(m) konstant ist. Die Annahme ist ok, falls T (n) ( ( ) n 3 T + T m ) 4 n n 3 c + m 4 n c + n n + C m + cn; dies gilt, falls m 2 n m C m + n 2 (bis auf, ) c m + 3
Geradenarrangements und Dualität von Punkten und Geraden
 Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Algorithmische Geometrie 4. Schnitte planarer Unterteilungen
 Algorithmische Geometrie 4. Schnitte planarer Unterteilungen JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten
Algorithmische Geometrie 4. Schnitte planarer Unterteilungen JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten
Geradenarrangements und Dualität von Punkten und Geraden
 Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 12.06.2012 Dualitätsabbildung Bisher haben wir Dualität für planare
Geradenarrangements und Dualität von Punkten und Geraden
 Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 17.06.2014 1 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie von Punkten und Geraden INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 17.06.2014 1 Dualitätsabbildung Bisher haben wir Dualität für planare
Vorlesung Algorithmische Geometrie Konvexe Hülle in R 3
 Vorlesung Algorithmische Geometrie Konvexe Hülle in R 3 INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 15.07.2014 1 Wdh: Konvexe Hülle in R 2 (VL1) Def: Eine Menge S R 2
Vorlesung Algorithmische Geometrie Konvexe Hülle in R 3 INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 15.07.2014 1 Wdh: Konvexe Hülle in R 2 (VL1) Def: Eine Menge S R 2
Einführung & Konvexe Hülle
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 14.04.2014 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu Raum 319 Sprechzeiten:
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 14.04.2014 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu Raum 319 Sprechzeiten:
Abgabe: (vor der Vorlesung) Aufgabe 2.1 (P) O-Notation Beweisen Sie die folgenden Aussagen für positive Funktionen f und g:
 Aufgabe 2.1 (P) O-Notation Beweisen Sie die folgenden Aussagen für positive Funktionen f und g:") TECHNISCHE UNIVERSITÄT MÜNCHEN FAKULTÄT FÜR INFORMATIK Lehrstuhl für Sprachen und Beschreibungsstrukturen SS 2009 Grundlagen: Algorithmen und Datenstrukturen Übungsblatt 2 Prof. Dr. Helmut Seidl, S. Pott,
TECHNISCHE UNIVERSITÄT MÜNCHEN FAKULTÄT FÜR INFORMATIK Lehrstuhl für Sprachen und Beschreibungsstrukturen SS 2009 Grundlagen: Algorithmen und Datenstrukturen Übungsblatt 2 Prof. Dr. Helmut Seidl, S. Pott,
Hallo Welt für Fortgeschrittene
 Hallo Welt für Fortgeschrittene Geometrie I Markus Götze Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Gliederung Grundlagen Polygone ccw Pick's Theorem Konvexe Hülle Hallo Welt für Fortgeschrittene
Hallo Welt für Fortgeschrittene Geometrie I Markus Götze Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Gliederung Grundlagen Polygone ccw Pick's Theorem Konvexe Hülle Hallo Welt für Fortgeschrittene
Die Geometrie der Tischlerei
 - Sommersemester 2009 Benjamin Bortfeldt Die Geometrie der Tischlerei 1 Worum geht es? Problem: Wir wollen ein einfaches Polygon P aus einer oder mehreren Holzplatten aussägen und dürfen dazu nur eine
- Sommersemester 2009 Benjamin Bortfeldt Die Geometrie der Tischlerei 1 Worum geht es? Problem: Wir wollen ein einfaches Polygon P aus einer oder mehreren Holzplatten aussägen und dürfen dazu nur eine
Algorithmische Geometrie, SoSe 2005 Skriptmitschrift vom 29. April 2005
 Algorithmische Geometrie, SoSe 2005 Skriptmitschrift vom 29. April 2005 Antonia Wittmers Igor Savchenko Konvexe Hüllen Inkrementeller Algorithmus für die konvexe Hülle Dabei heißt inkrementeller Algorithmus,
Algorithmische Geometrie, SoSe 2005 Skriptmitschrift vom 29. April 2005 Antonia Wittmers Igor Savchenko Konvexe Hüllen Inkrementeller Algorithmus für die konvexe Hülle Dabei heißt inkrementeller Algorithmus,
? P = NP Die 1 Million $ Frage. Prof. Dr. Hans Jürgen Ohlbach P =? NP
 ? P = NP Die 1 Million $ Frage Prof. Dr. Hans Jürgen Ohlbach 1 Historie 23 Hilbertsche Probleme aus dem Jahr 1900 Derzeit 10 gelöst 5 ungelöst 8 unklar formuliert oder teilweise gelöst David Hilbert 1886
? P = NP Die 1 Million $ Frage Prof. Dr. Hans Jürgen Ohlbach 1 Historie 23 Hilbertsche Probleme aus dem Jahr 1900 Derzeit 10 gelöst 5 ungelöst 8 unklar formuliert oder teilweise gelöst David Hilbert 1886
2.4. Triangulierung von Polygonen
 Als drittes Problem haben wir in Kapitel 1 die Triangulierung von Polygonen identifiziert, die etwa bei der Überwachung eines Museums durch Kameras auftritt. F70 F71 Definition und Theorie: Definition
Als drittes Problem haben wir in Kapitel 1 die Triangulierung von Polygonen identifiziert, die etwa bei der Überwachung eines Museums durch Kameras auftritt. F70 F71 Definition und Theorie: Definition
2.1. Konvexe Hülle in 2D
 2.1. Konvexe Hülle in 2D Wir wollen die konvexe Hülle einer Menge in der Ebene bestimmen. Def. 21: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar p, q, S das Liniensegment pqins liegt. Def. 22:
2.1. Konvexe Hülle in 2D Wir wollen die konvexe Hülle einer Menge in der Ebene bestimmen. Def. 21: Eine Teilmenge S der Ebene ist konvex gdw für jedes Paar p, q, S das Liniensegment pqins liegt. Def. 22:
Geometrie I. Sebastian Redinger Informatik 2 Programmiersysteme Martensstraße Erlangen
 Geometrie I Sebastian Redinger 01.07.2015 Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Gliederung Grundlagen CCW Polygone Picks Theorem Konvexe Hülle - Graham Scan - Jarvis March 2 Gliederung
Geometrie I Sebastian Redinger 01.07.2015 Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Gliederung Grundlagen CCW Polygone Picks Theorem Konvexe Hülle - Graham Scan - Jarvis March 2 Gliederung
Algorithmische Geometrie Mitschrift /
 Einleitung Algorithmische Geometrie beschäftigt sich mit dem Entwurf und der Analyse von effizienten Algorithmen für geometrische Probleme. Eingabedaten sind dabei geometrische Objekte, wie - Punkte -
Einleitung Algorithmische Geometrie beschäftigt sich mit dem Entwurf und der Analyse von effizienten Algorithmen für geometrische Probleme. Eingabedaten sind dabei geometrische Objekte, wie - Punkte -
Geometrische Algorithmen Einige einfache Definitionen: Ist ein Punkt in einem Polygon? Punkt-in-Polygon-Problem. Das Punkt-in-Polygon-Problem
 Geometrische Algorithmen Einige einfache Definitionen: Punkt: im n-dimensionalen Raum ist ein n-tupel (n Koordinaten) Gerade: definiert durch zwei beliebige Punkte auf ihr Strecke: definiert durch ihre
Geometrische Algorithmen Einige einfache Definitionen: Punkt: im n-dimensionalen Raum ist ein n-tupel (n Koordinaten) Gerade: definiert durch zwei beliebige Punkte auf ihr Strecke: definiert durch ihre
Geometrische Algorithmen Segmentschnitt. Lernmodul 7: Geo-Algorithmen und -Datenstrukturen - Segmentschnitt
 Folie 1 von 37 Geometrische Algorithmen Segmentschnitt Folie 2 von 37 Segmentschnitt Übersicht Zwei Segmente Lage zweier Segmente Prüfung auf Schnittfreiheit Formeln zum Geradenschnitt Feststellen des
Folie 1 von 37 Geometrische Algorithmen Segmentschnitt Folie 2 von 37 Segmentschnitt Übersicht Zwei Segmente Lage zweier Segmente Prüfung auf Schnittfreiheit Formeln zum Geradenschnitt Feststellen des
Grundlagen zur Delaunay-Triangulierung und zur konvexen Hülle. zum Begriff des Voronoi-Diagramms (vgl. auch Vorlesung "Algorithmische Geometrie"):
:") Grundlagen zur Delaunay-Triangulierung und zur konvexen Hülle zum Begriff des Voronoi-Diagramms (vgl. auch Vorlesung "Algorithmische Geometrie"): 1 Erzeugung des Voronoi-Diagramms (siehe Vorlesung "Algorithmische
Grundlagen zur Delaunay-Triangulierung und zur konvexen Hülle zum Begriff des Voronoi-Diagramms (vgl. auch Vorlesung "Algorithmische Geometrie"): 1 Erzeugung des Voronoi-Diagramms (siehe Vorlesung "Algorithmische
Algorithmische Geometrie: Delaunay Triangulierung (Teil 2)
") Algorithmische Geometrie: Delaunay Triangulierung (Teil 2) Nico Düvelmeyer WS 2009/2010, 2.2.2010 Überblick 1 Delaunay Triangulierungen 2 Berechnung der Delaunay Triangulierung Randomisiert inkrementeller
Algorithmische Geometrie: Delaunay Triangulierung (Teil 2) Nico Düvelmeyer WS 2009/2010, 2.2.2010 Überblick 1 Delaunay Triangulierungen 2 Berechnung der Delaunay Triangulierung Randomisiert inkrementeller
Geometrische Algorithmen
 Geometrische Algorithmen Thomas Röfer Motivation Scan-line-Prinzip Konvexe Hülle Distanzprobleme Voronoi-Diagramm Rückblick Manipulation von Mengen Vorrangwarteschlange Heap HeapSort swap(a, 0, 4) 1 5
Geometrische Algorithmen Thomas Röfer Motivation Scan-line-Prinzip Konvexe Hülle Distanzprobleme Voronoi-Diagramm Rückblick Manipulation von Mengen Vorrangwarteschlange Heap HeapSort swap(a, 0, 4) 1 5
Algorithmen und Datenstrukturen 2. Stefan Florian Palkovits, BSc Juni 2016
 Algorithmen und Datenstrukturen 2 Übung 1 Stefan Florian Palkovits, BSc 0926364 e0926364@student.tuwien.ac.at 12. Juni 2016 Aufgabe 1: Es existiert eine Reduktion von Problem A auf Problem B in O(n 3 +
Algorithmen und Datenstrukturen 2 Übung 1 Stefan Florian Palkovits, BSc 0926364 e0926364@student.tuwien.ac.at 12. Juni 2016 Aufgabe 1: Es existiert eine Reduktion von Problem A auf Problem B in O(n 3 +
Geometrische Algorithmen Segmentschnitt
 Folie 1 von 36 Geometrische Algorithmen Segmentschnitt Folie 2 von 36 Segmentschnitt Übersicht Zwei Segmente Lage zweier Segmente Prüfung auf Schnittfreiheit Formeln zum Geradenschnitt Feststellen des
Folie 1 von 36 Geometrische Algorithmen Segmentschnitt Folie 2 von 36 Segmentschnitt Übersicht Zwei Segmente Lage zweier Segmente Prüfung auf Schnittfreiheit Formeln zum Geradenschnitt Feststellen des
Geometrische Algorithmen Segmentschnitt
 Folie 1 von 36 Geometrische Algorithmen Segmentschnitt Folie 2 von 36 Segmentschnitt Übersicht Zwei Segmente! Lage zweier Segmente! Prüfung auf Schnittfreiheit! Formeln zum Geradenschnitt! Feststellen
Folie 1 von 36 Geometrische Algorithmen Segmentschnitt Folie 2 von 36 Segmentschnitt Übersicht Zwei Segmente! Lage zweier Segmente! Prüfung auf Schnittfreiheit! Formeln zum Geradenschnitt! Feststellen
Geometrie. Hallo Welt! für Fortgeschrittene Simon Kuhnle. 11. Juli
 Geometrie Hallo Welt! für Fortgeschrittene 2008 Simon Kuhnle sisikuhn@stud.informatik.uni-erlangen.de 11. Juli 2008 Simon Kuhnle Geometrie 11.07.2008 1 / 33 Übersicht Übersicht 1 Grundlagen 2 ccw 3 Konvexe
Geometrie Hallo Welt! für Fortgeschrittene 2008 Simon Kuhnle sisikuhn@stud.informatik.uni-erlangen.de 11. Juli 2008 Simon Kuhnle Geometrie 11.07.2008 1 / 33 Übersicht Übersicht 1 Grundlagen 2 ccw 3 Konvexe
Konvexe Hülle. Konvexe Hülle. Mathematik. Konvexe Hülle: Definition. Mathematik. Konvexe Hülle: Eigenschaften. AK der Algorithmik 5, SS 2005 Hu Bin
 Konvexe Hülle Konvexe Hülle AK der Algorithmik 5, SS 2005 Hu Bin Anwendung: Computergraphik Boundary Kalkulationen Geometrische Optimierungsaufgaben Konvexe Hülle: Definition Mathematik Konvex: Linie zwischen
Konvexe Hülle Konvexe Hülle AK der Algorithmik 5, SS 2005 Hu Bin Anwendung: Computergraphik Boundary Kalkulationen Geometrische Optimierungsaufgaben Konvexe Hülle: Definition Mathematik Konvex: Linie zwischen
Parallele Algorithmen in der Bildverarbeitung
 Seminar über Algorithmen - SoSe 2009 Parallele Algorithmen in der Bildverarbeitung von Christopher Keiner 1 Allgemeines 1.1 Einleitung Parallele Algorithmen gewinnen immer stärker an Bedeutung. Es existieren
Seminar über Algorithmen - SoSe 2009 Parallele Algorithmen in der Bildverarbeitung von Christopher Keiner 1 Allgemeines 1.1 Einleitung Parallele Algorithmen gewinnen immer stärker an Bedeutung. Es existieren
3.2 Generischer minimaler Spannbaum-Algorithmus
 3.2 Generischer minimaler Spannbaum-Algorithmus Initialisiere Wald F von Bäumen, jeder Baum ist ein singulärer Knoten (jedes v V bildet einen Baum) while Wald F mehr als einen Baum enthält do wähle einen
3.2 Generischer minimaler Spannbaum-Algorithmus Initialisiere Wald F von Bäumen, jeder Baum ist ein singulärer Knoten (jedes v V bildet einen Baum) while Wald F mehr als einen Baum enthält do wähle einen
Algorithmische Geometrie: Voronoi Diagramme (Teil 2)
") Algorithmische Geometrie: Voronoi Diagramme (Teil 2) Nico Düvelmeyer WS 2009/2010, 12.1.2010 Überblick 1 Definition und grundlegende Eigenschaften (Wied.) 2 Bestimmung des Voronoi Diagramms Gleitebenenverfahren
Algorithmische Geometrie: Voronoi Diagramme (Teil 2) Nico Düvelmeyer WS 2009/2010, 12.1.2010 Überblick 1 Definition und grundlegende Eigenschaften (Wied.) 2 Bestimmung des Voronoi Diagramms Gleitebenenverfahren
5. Bäume und Minimalgerüste
 5. Bäume und Minimalgerüste Charakterisierung von Minimalgerüsten 5. Bäume und Minimalgerüste Definition 5.1. Es ein G = (V, E) ein zusammenhängender Graph. H = (V,E ) heißt Gerüst von G gdw. wenn H ein
5. Bäume und Minimalgerüste Charakterisierung von Minimalgerüsten 5. Bäume und Minimalgerüste Definition 5.1. Es ein G = (V, E) ein zusammenhängender Graph. H = (V,E ) heißt Gerüst von G gdw. wenn H ein
Was bisher geschah. 1. Zerlegung in monotone Polygone 2. Triangulierung der monotonen Teilpolygone
 Was bisher geschah Motivation, Beispiele geometrische Objekte im R 2 : Punkt, Gerade, Halbebene, Strecke, Polygon, ebene Zerlegung in Regionen (planare Graphen) maschinelle Repräsentation geometrischer
Was bisher geschah Motivation, Beispiele geometrische Objekte im R 2 : Punkt, Gerade, Halbebene, Strecke, Polygon, ebene Zerlegung in Regionen (planare Graphen) maschinelle Repräsentation geometrischer
Definition 77 Sei n N. Der Median (das mittlere Element) einer total geordneten Menge von n Elementen ist deren i-kleinstes Element, wobei n i =.
 einer total geordneten Menge von n Elementen ist deren i-kleinstes Element, wobei n i =.") 2. Der Blum-Floyd-Pratt-Rivest-Tarjan Selektions-Algorithmus Definition 77 Sei n N. Der Median (das mittlere Element) einer total geordneten Menge von n Elementen ist deren i-kleinstes Element, wobei n
2. Der Blum-Floyd-Pratt-Rivest-Tarjan Selektions-Algorithmus Definition 77 Sei n N. Der Median (das mittlere Element) einer total geordneten Menge von n Elementen ist deren i-kleinstes Element, wobei n
Geometrische Algorithmen Voronoi-Diagramme. Lernmodul 7: Geo-Algorithmen und -Datenstrukturen - Voronoi-Diagramme
 Folie 1 von 32 Geometrische Algorithmen Voronoi-Diagramme Folie 2 von 32 Voronoi-Diagramme Übersicht Problemstellung Animation zur Konstruktion eines Voronoi-Diagramms Definition, Eigenschaften eines Voronoi-Diagramms
Folie 1 von 32 Geometrische Algorithmen Voronoi-Diagramme Folie 2 von 32 Voronoi-Diagramme Übersicht Problemstellung Animation zur Konstruktion eines Voronoi-Diagramms Definition, Eigenschaften eines Voronoi-Diagramms
Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1
 Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1 Aufgabe 1. / 16 P Instruktionen: 1) In dieser Aufgabe sollen Sie nur die Ergebnisse angeben. Diese können Sie direkt bei den Aufgaben notieren. 2) Sofern
Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1 Aufgabe 1. / 16 P Instruktionen: 1) In dieser Aufgabe sollen Sie nur die Ergebnisse angeben. Diese können Sie direkt bei den Aufgaben notieren. 2) Sofern
Geometrie 1. Roman Sommer. Informatik 2 Programmiersysteme Martensstraße Erlangen
 Geometrie 1 Roman Sommer Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Grundlagen Punkte, Vektoren Schreibweise: Skalar: Vektor: Komponente: Punkt: (spitzer) Winkel zw. zwei Vektoren:
Geometrie 1 Roman Sommer Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Grundlagen Punkte, Vektoren Schreibweise: Skalar: Vektor: Komponente: Punkt: (spitzer) Winkel zw. zwei Vektoren:
13 Berechenbarkeit und Aufwandsabschätzung
 13 Berechenbarkeit und Aufwandsabschätzung 13.1 Berechenbarkeit Frage: Gibt es für jede Funktion, die mathematisch spezifiziert werden kann, ein Programm, das diese Funktion berechnet? Antwort: Nein! [Turing
13 Berechenbarkeit und Aufwandsabschätzung 13.1 Berechenbarkeit Frage: Gibt es für jede Funktion, die mathematisch spezifiziert werden kann, ein Programm, das diese Funktion berechnet? Antwort: Nein! [Turing
Algorithmische Geometrie. Prof. Dr. Thomas Ottmann. Mitarbeit: PD Dr. Sven Schuierer Dr. Stefan Edelkamp
 Algorithmische Geometrie Prof. Dr. Thomas Ottmann Mitarbeit: PD Dr. Sven Schuierer Dr. Stefan Edelkamp Literatur: M. de Berg, M. van Krefeld, M. Overmars O. Schwarzkopf: Computational Geometry (Algorithms
Algorithmische Geometrie Prof. Dr. Thomas Ottmann Mitarbeit: PD Dr. Sven Schuierer Dr. Stefan Edelkamp Literatur: M. de Berg, M. van Krefeld, M. Overmars O. Schwarzkopf: Computational Geometry (Algorithms
Geometrie 1. Christian Bay Christian Bay Geometrie / 46
 Geometrie 1 Christian Bay 02.07.2013 Christian Bay Geometrie 1 02.07.2013 1 / 46 Inhaltsverzeichnis Grundlagen CCW Polygone Picks Theorem Konvexe Hülle Christian Bay Geometrie 1 02.07.2013 2 / 46 Geometrie
Geometrie 1 Christian Bay 02.07.2013 Christian Bay Geometrie 1 02.07.2013 1 / 46 Inhaltsverzeichnis Grundlagen CCW Polygone Picks Theorem Konvexe Hülle Christian Bay Geometrie 1 02.07.2013 2 / 46 Geometrie
Algorithmische Geometrie Thema: Konvexe Hüllen
 Algorithmische Geometrie Thema: Konvexe Hüllen Christoph Hermes Hermes@hausmilbe.de 17. Juni 2003 Ausblick auf den Vortrag 1/32 1 Was sind konvexe Hüllen? Wozu braucht man sie? Wie kann man sie berechnen
Algorithmische Geometrie Thema: Konvexe Hüllen Christoph Hermes Hermes@hausmilbe.de 17. Juni 2003 Ausblick auf den Vortrag 1/32 1 Was sind konvexe Hüllen? Wozu braucht man sie? Wie kann man sie berechnen
Einführung & Konvexe Hülle
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 14.04.2014 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu Raum 319 Sprechzeiten:
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 14.04.2014 AlgoGeom-Team Dozent Martin Nöllenburg noellenburg@kit.edu Raum 319 Sprechzeiten:
1 Rotating Calipers. 2 Antipodal und Copodal. 3 Distanzen Rechtecke Eigenschaften
 1 Rotating Calipers 2 3 Rotating Calipers - Algorithmus Konvexes Polygon mit parallelen Stützgeraden Rotating Calipers - Finder Shamos lässt 1978 zwei Stützgeraden um ein Polygon rotieren Zwei Stützgeraden
1 Rotating Calipers 2 3 Rotating Calipers - Algorithmus Konvexes Polygon mit parallelen Stützgeraden Rotating Calipers - Finder Shamos lässt 1978 zwei Stützgeraden um ein Polygon rotieren Zwei Stützgeraden
Algorithmische Geometrie 5. Triangulierung von Polygonen
 Algorithmische Geometrie 5. Triangulierung von Polygonen JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten 4.
Algorithmische Geometrie 5. Triangulierung von Polygonen JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten 4.
Algorithmische Geometrie 7. Punktsuche (Teil 2)
") Algorithmische Geometrie 7. Punktsuche (Teil 2) JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten 4. Schnitte
Algorithmische Geometrie 7. Punktsuche (Teil 2) JProf. Dr. Heike Leitte Computergraphik und Visualisierung Inhaltsverzeichnis 1. Einführung 2. Konvexe Hülle 3. Schnitte von Liniensegmenten 4. Schnitte
Algorithmische Geometrie: Lineare Optimierung (I)
") Algorithmische Geometrie: Lineare Optimierung (I) Nico Düvelmeyer WS 2009/2010, 17.11.2009 Überblick 1 Geometrie von Gießformen 2 Durchschnitte von Halbebenen 3 Inkrementeller Algorithmus Überblick 1 Geometrie
Algorithmische Geometrie: Lineare Optimierung (I) Nico Düvelmeyer WS 2009/2010, 17.11.2009 Überblick 1 Geometrie von Gießformen 2 Durchschnitte von Halbebenen 3 Inkrementeller Algorithmus Überblick 1 Geometrie
Stefan Schmid TU Berlin & T-Labs, Berlin, Germany. Reduktionen in der Berechenbarkeitstheorie
 Stefan Schmid TU Berlin & T-Labs, Berlin, Germany Reduktionen in der Berechenbarkeitstheorie Problem: Wie komme ich von hier zum Hamburger Hbf? 2 Beispiel P1 Wie komme ich von hier zum Hamburger Hbf? kann
Stefan Schmid TU Berlin & T-Labs, Berlin, Germany Reduktionen in der Berechenbarkeitstheorie Problem: Wie komme ich von hier zum Hamburger Hbf? 2 Beispiel P1 Wie komme ich von hier zum Hamburger Hbf? kann
Algorithmische Geometrie
 Algorithmische Geometrie Martin Peternell TU Wien 31. Fortbildungstagung für Geometrie 2010, Strobl 1 Themen der Algorithmische Geometrie Entwurf von Algorithmen für geometrische Fragestellungen betreffend
Algorithmische Geometrie Martin Peternell TU Wien 31. Fortbildungstagung für Geometrie 2010, Strobl 1 Themen der Algorithmische Geometrie Entwurf von Algorithmen für geometrische Fragestellungen betreffend
Pfadgenerierung/Polygone/Polygonoffsetting
 Pfadgenerierung/Polygone/Polygonoffsetting Jan Stenzel 17. Juni 2015 Proseminar: 3D-Druck-Verfahren 1 / 42 Gliederung I 1 Polygone Definition konkav, konvex und überschlagen 2 Clipping Was kann passieren?
Pfadgenerierung/Polygone/Polygonoffsetting Jan Stenzel 17. Juni 2015 Proseminar: 3D-Druck-Verfahren 1 / 42 Gliederung I 1 Polygone Definition konkav, konvex und überschlagen 2 Clipping Was kann passieren?
Komplexität von Algorithmen:
 Komplexität von Algorithmen: Ansatz: Beschreiben/erfassen der Komplexität über eine Funktion, zur Abschätzung des Rechenaufwandes abhängig von der Größe der Eingabe n Uns interessiert: (1) Wie sieht eine
Komplexität von Algorithmen: Ansatz: Beschreiben/erfassen der Komplexität über eine Funktion, zur Abschätzung des Rechenaufwandes abhängig von der Größe der Eingabe n Uns interessiert: (1) Wie sieht eine
n t(2k + 1) in den P k s r = n t(2k + 1) Rest
 in den P k s r = n t(2k + 1) Rest") Kette von P k s: Gesamtzahl der Elemente: top P k bottom P k P k }{{} t n t(2k + 1) in den P k s r = n t(2k + 1) Rest EADS 4 Schönhage/Paterson/Pippenger-Median-Algorithmus 365/530 Wenn r < t 1, dann wissen
Kette von P k s: Gesamtzahl der Elemente: top P k bottom P k P k }{{} t n t(2k + 1) in den P k s r = n t(2k + 1) Rest EADS 4 Schönhage/Paterson/Pippenger-Median-Algorithmus 365/530 Wenn r < t 1, dann wissen
Datenstrukturen und Algorithmen
 Joost-Pieter Katoen Datenstrukturen und Algorithmen 1/36 Datenstrukturen und Algorithmen Vorlesung 20: (K33) Joost-Pieter Katoen Lehrstuhl für Informatik 2 Software Modeling and Verification Group http://moves.rwth-aachen.de/teaching/ss-15/dsal/
Joost-Pieter Katoen Datenstrukturen und Algorithmen 1/36 Datenstrukturen und Algorithmen Vorlesung 20: (K33) Joost-Pieter Katoen Lehrstuhl für Informatik 2 Software Modeling and Verification Group http://moves.rwth-aachen.de/teaching/ss-15/dsal/
Kapitel 9 Algorithm. Geometrie. Kürzeste Abstände Konvexe Hülle
 Kapitel 9 Algorithm. Geometrie Kürzeste Abstände Konvexe Hülle Überblick Teilgebiet der Informatik, in dem es um die Entwicklung effizienter Algorithmen und die Bestimmung der algorithmischen Komplexität
Kapitel 9 Algorithm. Geometrie Kürzeste Abstände Konvexe Hülle Überblick Teilgebiet der Informatik, in dem es um die Entwicklung effizienter Algorithmen und die Bestimmung der algorithmischen Komplexität
Datenstrukturen und Algorithmen. Christian Sohler FG Algorithmen & Komplexität
 Datenstrukturen und Algorithmen Christian Sohler FG Algorithmen & Komplexität 1 Geometrisches Problem: Problem: Nächstes Paar Eingabe: n Punkte in der Ebene Ausgabe: Das Paar q,r mit geringstem Abstand
Datenstrukturen und Algorithmen Christian Sohler FG Algorithmen & Komplexität 1 Geometrisches Problem: Problem: Nächstes Paar Eingabe: n Punkte in der Ebene Ausgabe: Das Paar q,r mit geringstem Abstand
Kapitel III Selektieren und Sortieren
 Kapitel III Selektieren und Sortieren 1. Einleitung Gegeben: Menge S von n Elementen aus einem total geordneten Universum U, i N, 1 i n. Gesucht: i-kleinstes Element in S. Die Fälle i = 1 bzw. i = n entsprechen
Kapitel III Selektieren und Sortieren 1. Einleitung Gegeben: Menge S von n Elementen aus einem total geordneten Universum U, i N, 1 i n. Gesucht: i-kleinstes Element in S. Die Fälle i = 1 bzw. i = n entsprechen
Das Voronoi Diagramm. 1. Definition. 2. Eigenschaften. 3. Größe und Speicherung. 4. Konstruktion. 5. Verwendung
 Das Voronoi Diagramm 1. Definition 2. Eigenschaften 3. Größe und Speicherung 4. Konstruktion 5. Verwendung Das Voronoi- Diagramm Voronoi Regionen Euklidische Distanz: d(p,q) = (px-qx)^2+(py-qy)^2 Das Voronoi-Diagramm
Das Voronoi Diagramm 1. Definition 2. Eigenschaften 3. Größe und Speicherung 4. Konstruktion 5. Verwendung Das Voronoi- Diagramm Voronoi Regionen Euklidische Distanz: d(p,q) = (px-qx)^2+(py-qy)^2 Das Voronoi-Diagramm
Numerisches Programmieren, Übungen
 Technische Universität München SoSe 3 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Jürgen Bräckle Numerisches Programmieren, Übungen Musterlösung 3. Übungsblatt:
Technische Universität München SoSe 3 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Jürgen Bräckle Numerisches Programmieren, Übungen Musterlösung 3. Übungsblatt:
Konvexe Hülle. Abbildung: [Wikipedia]: Nicht-konvexe Menge (links), konvexe Menge (rechts) KIT Institut für Theoretische Informatik 510
![Konvexe Hülle. Abbildung: [Wikipedia]: Nicht-konvexe Menge (links), konvexe Menge (rechts) KIT Institut für Theoretische Informatik 510](/thumbs/72/66802198.jpg "Konvexe Hülle. Abbildung: [Wikipedia]: Nicht-konvexe Menge (links), konvexe Menge (rechts) KIT Institut für Theoretische Informatik 510") Konvexe Hülle Definition konvexe Menge: Für je zwei beliebige Punkte, die zur Menge gehören, liegt auch stets deren Verbindungsstrecke ganz in der Menge. Abbildung: [Wikipedia]: Nicht-konvexe Menge (links),
Konvexe Hülle Definition konvexe Menge: Für je zwei beliebige Punkte, die zur Menge gehören, liegt auch stets deren Verbindungsstrecke ganz in der Menge. Abbildung: [Wikipedia]: Nicht-konvexe Menge (links),
Uberblick 1. Kurzeste Wege 2. Sichtbarkeitsgraphen 3. Berechnung des Sichtbarkeitsgraphen 4. Kurzeste Wege fur polygonale Roboter 1
 Vorlesung Geometrische Algorithmen Sichtbarkeitsgraphen und kurzeste Wege Sven Schuierer Uberblick 1. Kurzeste Wege 2. Sichtbarkeitsgraphen 3. Berechnung des Sichtbarkeitsgraphen 4. Kurzeste Wege fur polygonale
Vorlesung Geometrische Algorithmen Sichtbarkeitsgraphen und kurzeste Wege Sven Schuierer Uberblick 1. Kurzeste Wege 2. Sichtbarkeitsgraphen 3. Berechnung des Sichtbarkeitsgraphen 4. Kurzeste Wege fur polygonale
Programmieren und Problemlösen
 Dennis Komm Programmieren und Problemlösen Komplexität von Algorithmen Frühling 2019 27. Februar 2019 Komplexität von Algorithmen Aufgabe Primzahltest Schreibe ein Programm, das eine ganze Zahl x als Eingabe
Dennis Komm Programmieren und Problemlösen Komplexität von Algorithmen Frühling 2019 27. Februar 2019 Komplexität von Algorithmen Aufgabe Primzahltest Schreibe ein Programm, das eine ganze Zahl x als Eingabe
Das Divide - and - Conquer Prinzip. Quicksort Formulierung und Analyse des Prinzips Geometrisches Divide and Conquer - Closest-Pair - Segmentschnitt
 Divide and Conquer Das Divide - and - Conquer Prinzip Quicksort Formulierung und Analyse des Prinzips Geometrisches Divide and Conquer - Closest-Pair - Segmentschnitt 2 Quicksort: Sortieren durch Teilen
Divide and Conquer Das Divide - and - Conquer Prinzip Quicksort Formulierung und Analyse des Prinzips Geometrisches Divide and Conquer - Closest-Pair - Segmentschnitt 2 Quicksort: Sortieren durch Teilen
3. Minimale Spannbäume. Definition 99 T heißt minimaler Spannbaum (MSB, MST) von G, falls T Spannbaum von G ist und gilt:
 von G, falls T Spannbaum von G ist und gilt:") 3. Minimale Spannbäume Sei G = (V, E) ein einfacher ungerichteter Graph, der o.b.d.a. zusammenhängend ist. Sei weiter w : E R eine Gewichtsfunktion auf den Kanten von G. Wir setzen E E: w(e ) = e E w(e),
3. Minimale Spannbäume Sei G = (V, E) ein einfacher ungerichteter Graph, der o.b.d.a. zusammenhängend ist. Sei weiter w : E R eine Gewichtsfunktion auf den Kanten von G. Wir setzen E E: w(e ) = e E w(e),
t(2k + 1) in den P k s r = n t(2k + 1) Rest
 in den P k s r = n t(2k + 1) Rest") Kette von P k s: top bottom P k Gesamtzahl der Elemente: n P k P k } {{ } t t(k + 1) in den P k s r = n t(k + 1) Rest EADS 4 Schönhage/Paterson/Pippenger-Median-Algorithmus 365/600 Wenn r < t 1, dann wissen
Kette von P k s: top bottom P k Gesamtzahl der Elemente: n P k P k } {{ } t t(k + 1) in den P k s r = n t(k + 1) Rest EADS 4 Schönhage/Paterson/Pippenger-Median-Algorithmus 365/600 Wenn r < t 1, dann wissen
Liniensegmentschnitt. Doppelt verkettete Kantenliste. Überlagerung von 2 ebenen Graphen. Boolsche Operatoren für einfache Polygone (LEDA)
") Liniensegmentschnitt Motivation, Überlagerung von Karten, Problemformulierung Ein einfaches Problem und dessen Lösung mit Hilfe des Sweep-Line Prinzips Output-sensitiver Liniensegmentschnittalgorithmus
Liniensegmentschnitt Motivation, Überlagerung von Karten, Problemformulierung Ein einfaches Problem und dessen Lösung mit Hilfe des Sweep-Line Prinzips Output-sensitiver Liniensegmentschnittalgorithmus
Geometrie I. Tobias Langer Tobias Langer Geometrie I / 59
 Geometrie I Tobias Langer 02.07.2010 Tobias Langer Geometrie I 02.07.2010 1 / 59 1 Schulgeometrie Punkte & Geraden Dreieck Kreis Polygon 2 Schnitt von Geraden und Strecken 3 Punkt in Polygon Tobias Langer
Geometrie I Tobias Langer 02.07.2010 Tobias Langer Geometrie I 02.07.2010 1 / 59 1 Schulgeometrie Punkte & Geraden Dreieck Kreis Polygon 2 Schnitt von Geraden und Strecken 3 Punkt in Polygon Tobias Langer
Kombinatorische Optimierung
 Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 16 Programm: Einführung
Juniorprof. Dr. Henning Meyerhenke 1 Henning Meyerhenke: KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Vorlesung 16 Programm: Einführung
Algorithmische Anwendungen. Algorithmen zur Berechnung konvexer Hüllen von Punkten
 Algorithmische Anwendungen Algorithmen zur Berechnung konvexer Hüllen von Punkten Gruppe: C Team: lila Benz Andreas Matrikel-Nr.: 11036930 Radke Eugen Matrikel-Nr.: 11037089 Inhaltsverzeichnis 1. Einführung...3
Algorithmische Anwendungen Algorithmen zur Berechnung konvexer Hüllen von Punkten Gruppe: C Team: lila Benz Andreas Matrikel-Nr.: 11036930 Radke Eugen Matrikel-Nr.: 11037089 Inhaltsverzeichnis 1. Einführung...3
Geometrie I. Polygone. Dominik Huber Hallo Welt! für Fortgeschrittene. Informatik 2 Programmiersysteme Martensstraße Erlangen
 Geometrie I Polygone Dominik Huber 28.5.2018 Hallo Welt! für Fortgeschrittene Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Gliederung Wiederholung Analytische Geometrie Abstand Punkt
Geometrie I Polygone Dominik Huber 28.5.2018 Hallo Welt! für Fortgeschrittene Informatik 2 Programmiersysteme Martensstraße 3 91058 Erlangen Gliederung Wiederholung Analytische Geometrie Abstand Punkt
Automatische Bestimmung der konvexen Hülle einer endlichen Punktmenge in der Ebene
 Automatische Bestimmung der konvexen Hülle einer endlichen Punktmenge in der Ebene Martin Rheinländer Fachbereich Mathematik & Statistik, Universität Konstanz Seminarvortrag 18. Mai 2005 Was ist eine konvexe
Automatische Bestimmung der konvexen Hülle einer endlichen Punktmenge in der Ebene Martin Rheinländer Fachbereich Mathematik & Statistik, Universität Konstanz Seminarvortrag 18. Mai 2005 Was ist eine konvexe
Komplexität von Algorithmen
 Komplexität von Algorithmen Prof. Dr. Christian Böhm WS 07/08 in Zusammenarbeit mit Gefei Zhang http://www.dbs.informatik.uni-muenchen.de/lehre/nfinfosw Ressourcenbedarf - Größenordnungen Prozesse verbrauchen
Komplexität von Algorithmen Prof. Dr. Christian Böhm WS 07/08 in Zusammenarbeit mit Gefei Zhang http://www.dbs.informatik.uni-muenchen.de/lehre/nfinfosw Ressourcenbedarf - Größenordnungen Prozesse verbrauchen
Von Labyrinthen zu. Algorithmen
 Von Labyrinthen zu 4 Gerald Futschek Charakterisierung Algorithmus Ein Algorithmus ist ein schrittweises Verfahren ist exakt beschrieben liefert nach endlich vielen Schritten das Ergebnis (terminiert)
Von Labyrinthen zu 4 Gerald Futschek Charakterisierung Algorithmus Ein Algorithmus ist ein schrittweises Verfahren ist exakt beschrieben liefert nach endlich vielen Schritten das Ergebnis (terminiert)
Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1
 Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1 Aufgabe 1. / 15 P Hinweise: 1) In dieser Aufgabe sollen Sie nur die Ergebnisse angeben. Diese können Sie direkt bei den Aufgaben notieren. 2) Sofern
Stud.-Nummer: Datenstrukturen & Algorithmen Seite 1 Aufgabe 1. / 15 P Hinweise: 1) In dieser Aufgabe sollen Sie nur die Ergebnisse angeben. Diese können Sie direkt bei den Aufgaben notieren. 2) Sofern
Kapitel 6: Algorithmen der Computer-Geometrie
 LUDWIG- MAXIMILIANS- UNIVERSITY MUNICH DEPARTMENT INSTITUTE FOR INFORMATICS Kapitel 6: Algorithmen der Computer-Geometrie Skript zur Vorlesung Geo-Informationssysteme Wintersemester 2015/16 Ludwig-Maximilians-Universität
LUDWIG- MAXIMILIANS- UNIVERSITY MUNICH DEPARTMENT INSTITUTE FOR INFORMATICS Kapitel 6: Algorithmen der Computer-Geometrie Skript zur Vorlesung Geo-Informationssysteme Wintersemester 2015/16 Ludwig-Maximilians-Universität
Punktlokalisierung. Dr. Martin Nöllenburg Vorlesung Algorithmische Geometrie
 Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 24.05.2011 Motivation Gegeben eine Position p = (p x, p y )
Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 24.05.2011 Motivation Gegeben eine Position p = (p x, p y )
Suchen und Sortieren
 Suchen und Sortieren Suchen Sortieren Mischen Zeitmessungen Bewertung von Sortier-Verfahren Seite 1 Suchverfahren Begriffe Suchen = Bestimmen der Position (Adresse) eines Wertes in einer Datenfolge Sequentielles
Suchen und Sortieren Suchen Sortieren Mischen Zeitmessungen Bewertung von Sortier-Verfahren Seite 1 Suchverfahren Begriffe Suchen = Bestimmen der Position (Adresse) eines Wertes in einer Datenfolge Sequentielles
Geometrie 2. Julian Fischer Julian Fischer Geometrie / 30
 Geometrie 2 Julian Fischer 6.7.2009 Julian Fischer Geometrie 2 6.7.2009 1 / 30 Themen 1 Bereichssuche und kd-bäume 1 Bereichssuche 2 kd-bäume 2 Divide and Conquer 1 Closest pair 2 Beispiel: Points (IOI
Geometrie 2 Julian Fischer 6.7.2009 Julian Fischer Geometrie 2 6.7.2009 1 / 30 Themen 1 Bereichssuche und kd-bäume 1 Bereichssuche 2 kd-bäume 2 Divide and Conquer 1 Closest pair 2 Beispiel: Points (IOI
Polygontriangulierung
 Übung Algorithmische Geometrie Polygontriangulierung LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Benjamin Niedermann 07.05.204 Ablauf Vergabe der Projekte Übungsblatt
Übung Algorithmische Geometrie Polygontriangulierung LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Benjamin Niedermann 07.05.204 Ablauf Vergabe der Projekte Übungsblatt
Algorithmische Kryptographie
 Algorithmische Kryptographie Walter Unger Lehrstuhl für Informatik I 16. Februar 2007 Public-Key-Systeme: Rabin 1 Das System nach Rabin 2 Grundlagen Körper Endliche Körper F(q) Definitionen Quadratwurzel
Algorithmische Kryptographie Walter Unger Lehrstuhl für Informatik I 16. Februar 2007 Public-Key-Systeme: Rabin 1 Das System nach Rabin 2 Grundlagen Körper Endliche Körper F(q) Definitionen Quadratwurzel
Punktlokalisierung. Dr. Martin Nöllenburg Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 22.05.2012 Nachtrag: Dynamische Bereichsabfragen Letzte Woche: kd-trees und Range-Trees
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 22.05.2012 Nachtrag: Dynamische Bereichsabfragen Letzte Woche: kd-trees und Range-Trees
Übungen zur Vorlesung Algorithmische Geometrie
 Prof. Dr. E. Wanke Düsseldorf, 22. Juni 2016 S. Hoffmann, M.Sc. Übungen zur Vorlesung Algorithmische Geometrie Hinweise Programmieraufgaben: Alle vorgeschlagenen Programmieraufgaben können Sie in einer
Prof. Dr. E. Wanke Düsseldorf, 22. Juni 2016 S. Hoffmann, M.Sc. Übungen zur Vorlesung Algorithmische Geometrie Hinweise Programmieraufgaben: Alle vorgeschlagenen Programmieraufgaben können Sie in einer
Schematisierung von Karten
 Vorlesung Algorithmische Kartografie Schematisierung von (Straßen-)Karten LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 30.04.2013 Schematische
Vorlesung Algorithmische Kartografie Schematisierung von (Straßen-)Karten LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 30.04.2013 Schematische
Polygontriangulierung
 Vorlesung Algorithmische Geometrie Polygone triangulieren LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 26.04.2011 Das Kunstgalerie-Problem
Vorlesung Algorithmische Geometrie Polygone triangulieren LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 26.04.2011 Das Kunstgalerie-Problem