Das Kontrollnetz von Zyklidenstücken
|
|
|
- Ilse Schulz
- vor 5 Jahren
- Abrufe
Transkript
1 Das Kontrollnetz von Zyklidenstücken Hans-Peter Schröcker Arbeitsbereich für Geometrie und CAD Universität Innsbruck Dresden, 9. Juni 2009

2
3 Übersicht Dupinsche Zykliden und Superzykliden Das Kontrollnetz eines Zyklidenstückes Stückweise Zyklidenparametrisierungen Diskretisierung von Krümmungslinien



4 Dupinsche Zykliden Inversion von Torus, Drehkegel, Drehzylinder Krümmungslinien sind Kreise in Ebenenbüscheln Berührkugel, Berührkegel längs Krümmungslinien algebraisch vom Grad vier, rational vom Bi-Grad (2, 2)

5 Zyklidenstücke als rationale Bézierflächen
 projektiv transformierte")

6 Superzykliden (E. Blutel, W. Degen) projektiv transformierte Dupinsche Zyklide (im Wesentlichen) konjugiertes Netz aus Kegelschnitten berührende Tangentialkegel
7 Zykliden im CAGD Flächenapproximation (Martin, de Pont, Sharrock 1986) Übergangsflächen (Böhm, Degen, Dutta, Pratt,...; 1990er) Vorteile: reiche geometrische Struktur geringer algebraischer Grad rationale Parametrisierung vom Bi-Grad (2, 2): Krümmungslinien (oder konjugierte Kurven) Kreise (oder Kegelschnitte) Dupinsche Zykliden: Parallelflächen sind wieder Dupinsche Zykliden Quadratwurzelparametrisierung für Bisektorflächen
8 Zykliden im CAGD Flächenapproximation (Martin, de Pont, Sharrock 1986) Übergangsflächen (Böhm, Degen, Dutta, Pratt,...; 1990er) Vorteile: reiche geometrische Struktur geringer algebraischer Grad rationale Parametrisierung vom Bi-Grad (2, 2): Krümmungslinien (oder konjugierte Kurven) Kreise (oder Kegelschnitte) Dupinsche Zykliden: Parallelflächen sind wieder Dupinsche Zykliden Quadratwurzelparametrisierung für Bisektorflächen Allgemeine Auffassung: Zykliden sind nicht flexibel genug für Freiformmodellierung.
9 Rationale Parametrisierung (Dupinsche Zykliden) Trigonometrische Parametrisierung (Forsyth; 1912) Φ(θ, ψ) = µ(c a cos θ cos ψ) + b 1 2 cos θ b sin θ(a µ cos ψ) a c cos θ cos ψ b sin ψ(c cos θ µ) a, c, µ R; b = a 2 c 2 Darstellung als rationale Bézierfläche 1. θ = 2 arctan u, ψ = 2 arctan v 2. u α u + β γ u + δ, v α v + β γ v + δ 3. Umrechnung in Bernsteinbasis Problem: Konstruktion ohne bekannte Parametrisierung?
10 Rationale Parametrisierung (Superzykliden) Gegeben: vier Punkte A, B, C, D P 3 drei quadratische Formen f, a, b in u drei quadratische Formen g, c, d in v Parametrisierung nach Degen: Σ(u, v) = g(v) ( a(u)a + b(u)b ) +f (u) ( c(v)c + d(v)d ) Problem: Konstruktion ohne bekannte Parametrisierung?
11 Zykliden als Tensorprodukt-Bézierflächen Jedes Zyklidenstück kann als rationale Tensorprodukt-Bézierfläche vom Bi-Grad (2, 2) dargestellt werden: Φ(u, v) = 2 2 i=0 j=0 B2 i (u)b2 j (v)w ijp ij 2 2 i=0 j=0 w ij, B n k (t) = ( n k ) (1 t) n k t k Ziele: elementare Konstruktion der Kontrollpunkte p ij geometrische Eigenschaften des Kontrollnetzes elementare Konstruktion der Gewichte w ij Anwendung in CAGD und diskreter Differentialgeometrie
12 Konstruktion der Kontrollpunkte von Dupinschen Zyklidenstücken

13 Die Eckpunkte 1. Die vier Eckpunkte p 00, p 02, p 20 und p 22 liegen auf einem Kreis. Begründung
14 Die fehlenden Randpunkte 2.a Die fehlenden Randpunkte p 01, p 10, p 12, p 21 liegen in den Symmetrieebenen ihrer Eckpunkte. 2.b Ein Paar von orthogonalen Ecktangenten kann beliebig gewählt werden. Begründung Hintereinanderausführung der Spiegelungen an Seitensymmetralen eines Kreisvierecks ergibt die Identität. p 20 p 21 p 22 p 12 p 02 p 10 y p 00 x p 01
15 Der zentrale Kontrollpunkt 3. Der zentrale Kontrollpunkt p 11 liegt in den vier Ecktangentialebenen. Begründung Φ(u, v) konjugierte Flächenparametrisierung Φ u, Φ v und Φ uv linear abhängig p 22 Die Vierecke p 00 p 01 p 10 p 11, p 01 p 02 p 12 p 11, p 10 p 20 p 21 p 10, p 12 p 21 p 22 p 11 sind eben. p 20 p 21 p 11 p 10 y x p 00 p 12 p 01 p 02
16 Offensichtliche Eigenschaften des Kontrollnetzes Kopunktale Geraden: Koaxiale Ebenen: p 00 p 10, p 00 p 10 p 20, p 01 p 11, p 01 p 11 p 21, p 02 p 12. p 02 p 12 p 22.
17 Einschub: Paare orthogonaler Oktaeder Entsprechende Seiten des»x-achsen Tetreaders«und des»y-achsen Tetreaders«sind orthogonal. Gibt es eine Charakterisierung und/oder Untersuchung von Paaren orthogonaler Tetraeder?
18 Das Kontrollnetz als diskretes Koenigs-Netz Komplanare Diagonalpunkte: (p 00 p 11 ) (p 01 p 10 ), (p 01 p 12 ) (p 02 p 11 ), (p 10 p 21 ) (p 11 p 20 ), (p 11 p 22 ) (p 12 p 21 ). Koaxiale Ebenen: p 00 p 11 p 02, p 10 p 11 p 12, p 20 p 11 p 22. Netz aus dualen Vierseiten existiert
19 p 22 s 10 s 01 p 21 p 12 p 02 p 20 p 11 p 10 p 01 s 21 s 12 p 00

20 Ein Hilfssatz die Punkte d 0, d 1, d 2 und d 3 liegen koplanar die vier schattierten Ebenen sind kopunktal
21 Das Kontrollnetz der Parallelfläche
22 Das Kontrollnetz der Parallelfläche Punktabstandsnetz (zirkuläres Netz) Flächenabstandsnetz (konisches Netz die vier Ecktangentialebenen umhüllen einen Drehkegel). Ecktangenten in einer Netzrichtung haben konstanten Abstands
23 Die Gewichte Berechnung der Gewichte (Dupinsche Zykliden) Verwendung einer Parametrisierung indirekte Berechnung über Längenrelationen gefolgt von Unterteilung (Kaps 1990) Berechnung einer Parametrisierung mittels Lie-Geometrie (Bobenko, Huhnen-Venedey 2008) Berechnung der Gewichte (Superzykliden) Verwendung einer Parametrisierung
24 Die Gewichtspunkte benachbarte Kontrollpunkte p i, p j Gewichte w i, w j Gewichtspunkt (Farin Punkt) g ij = w ip i + w j p j w i + w j p 1, w 1 = sin α 2α g 01 g 21 p 0, w 0 = 1 p 2, w 2 = 1
25 Die Gewichtspunkte Eigenschaften der Gewichtspunkte Gewichtspunkte einer Netzmasche sind koplanar. Sie treten als Punkte der ersten Iterationsstufe im Algorithmus von de Casteljau auf. Sie erlauben die Rekonstruktion der Gewichtsverhältnisse. p 1, w 1 = sin α 2α g 01 g 21 p 0, w 0 = 1 p 2, w 2 = 1
26 Gewichtspunkte auf Zyklidenstücken p 22 s 10 s 01 p 21 p 12 p 20 p 11 p 02 p 10 p 01 s 21 s 12 p 00 Algorithmus von de Casteljau = Gewichtspunkte benachbarter Netzfäden liegen perspektiv.
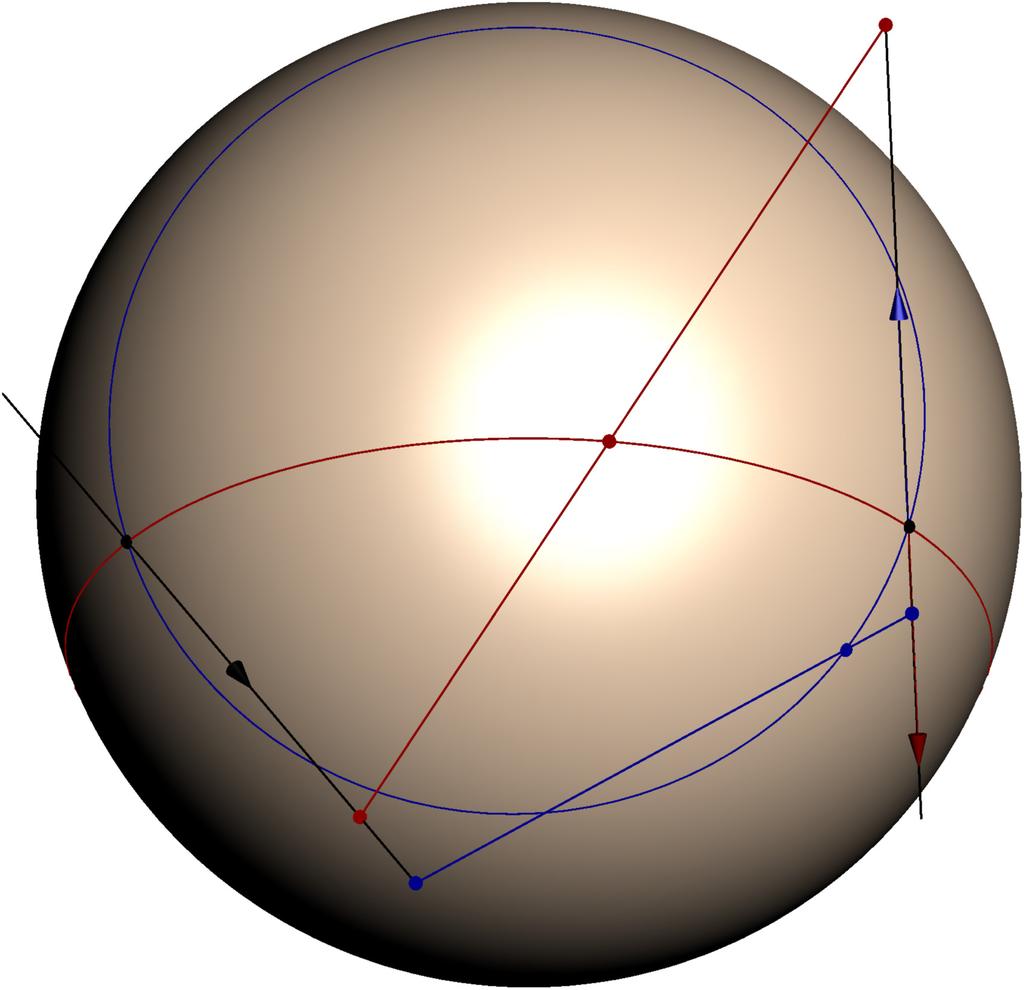
27 Gewichtspunkte auf Zyklidenstücken p 22 s 10 s 01 p 21 p 12 p 20 p 11 p 02 p 10 p 01 s 21 s 12 p 00 Dupinsche Zykliden: Ein blauer und ein roter Gewichtspunkt können beliebig vorgegeben werden.
28 Gewichtspunkte auf Zyklidenstücken p 22 s 10 s 01 p 21 p 12 p 20 p 11 p 02 p 10 p 01 s 21 s 12 p 00 Superzykliden: Zwei blaue und zwei rote Gewichtspunkte auf verschiedenen Facetten können beliebig vorgegeben werden.
29 Konstruktion von zusammengesetzten Flächen
30 Bestimmung des Kontrollnetzes aus Randfäden Gegeben: zwei Randstreifen (Kontrollpunkte, Gewichte, Berührkegelscheitel) fehlender Eckpunkt s 21 s 12 p 21 p 22 p 12 p 20 p 11 p 02 p 10 p 01 p 00 s 10 s 01
31 Netzparametrisierung mit Zyklidenstücken Gegeben: zirkuläres Netz oder Vierseitnetz mit ebenen Maschen ein Dupinsches Zyklidenpatch oder ein Superzyklidenpatch zu einer Netzmasche Konsistente Übertragung der Kontroll- und Gewichtspunkte auf alle Netzmaschen ist möglich! = differenzierbare Parametrisierung zirkulärer Netze mit Dupinschen Zyklidenstücken (Bobenko und Huhnen-Venedey, 2008) = differenzierbare Parametrisierung von Vierseitnetzen mit ebenen Maschen durch Superzyklidenstücke

32 Bemerkungen nur Netze mit Rechteckstopologie zweiparametrige Schar von Parametrisierungen duales konisches Netz wird mitparametrisiert Liesche Geraden-Kugeltransformation = Asymptotenlinenparametrisierung von Vierseitnetzen mit ebenem Eckenstern durch Hyperboloidstücke
33 Anwendungen im CAGD Netzinterpolation durch Zyklidenstücke ist wünschenswert Beschränkung auf zirkuläre oder ebene Vierseitnetze ist störend Vorschlag: Interpolation durch k l Verbände von Dupinschen Zyklidenstücken (Martin, de Pont, Sharrock 1986) k l Freiheitsgrade bei Vorgabe zweier Randstreifen = 2 2 Verbände zur Interpolation beliebiger Vierseitnetze = 3 3 Verbände zur Interpolation beliebiger Vierseitnetze mit vorgegebenen Normalen
34 2 2 Dupinsche Zyklidenstücke a b h K c d 1. Wahl von h 2. Treffgerade zweier Kreisachsen in Symmetrieebene von h und d

35 Ein Hilfssatz Gegeben: Zwei Kreise K 1 und K 2. Gesucht: Kreise, die K 1 und K 2 zweimal schneiden.
36 3 3 Dupinsche Zyklidenstücke a b f g h k K c d 1. Wahl von f, g, h, k 2. Drehkreis K für Berührelement (k, κ) und (d, δ) 3. zweifache Treffkreise zweier Kreise durch zwei bekannte Punkte
37 Diskrete konjugierte Kurvennetze Konjugiertes Kurvennetz Φ u, Φ v und Φ uv sind linear abhängig. Benachbarte u-tangenten in Φ(u, v), Φ(u + du, v) schneiden sich. Benachbarte u-tangenten in Φ(u, v), Φ(u, v + dv) schneiden sich. Mögliche Diskretisierungen ebenes Vierseitnetz (beide Kurvenscharen) duales ebenes Vierseitnetz (beide Kurvenscharen) diskrete Geradenkongruenz (eine Kurvenschar)
38 Diskrete Krümmungsnetze Krümmungsnetz konjugiertes Netz benachbarte Normalen schneiden sich Mögliche Diskretisierungen zirkuläres Netz (punktbasiert) konisches Netz (flächenbasiert; Liu et al., 2006) orientierte diskrete Geradenkongruenz mit Elementarvierseiten auf Drehhyperboloid (linienbasiert;»hr-kongruenz«)
39 HR-Kongruenzen l: Z 2 L 3, (i, j) l i,j benachbarte Geraden l i,j und l i,j+1 beziehungsweise l i,j und l i+1,j schneiden sich. l i,j, l i+1,j, l i+1,j+1, l i,j+1 liegen auf einem Drehhyperboloid H. Orientierung so, dass Symmetrieebenen benachbarter Strahlen die Achse von H enthalten ( = benachbarte Drehachsen schneiden sich).

40 HR-Kongruenzen als»x-achsen Kongruenz«
41 Eigenschaften der HR-Kongruenzen Es gibt HR-Kongruenzen in konstantem Abstand (nicht charakteristisch). Es gibt orthogonale HR-Kongruenzen als Diskretisierung der zweiten Schar von Krümmungslinien (»y-achsen«kongruenz). Es gibt zirkuläre und konische Netze mit inzidenten Elementen. Eine natürliche Parametrisierung durch Stücke von Dupinschen Zykliden ist möglich. Die Kantenabstandsnetze ( EO-nets ) von Pottmann et al. (2007) treten als Grenzfall mit»flachen«hyperboloiden auf.
42 Diskrete Abstandskongruenzen
43 Zusammenfassung und Ausblick Zusammenfassung gemeinsamer Zugang zu diskretisierten Krümmungslinien über Dupinsche Zyklidenstücke einfache und intuitive Konstruktion von Dupinschen Zyklidenstücken und Superzyklidenstücken mit Anwendungen im CAGD linienbasierte Krümmungsliniendiskretisierung Ausblick Erzeugung durch Spiegelungen mit σ 4 σ 3 σ 2 σ 1 = id. Erzeugung durch Drehungen/Schraubungen mit τ 4 τ 3 τ 2 τ 1 = id. Netzparametrisierung bei ungenauen Daten (fast zirkulär, fast eben)
Computergrafik Inhalt Achtung! Kapitel ist relevant für CG-2!
 Coputergrafik Inhalt Achtung! Kapitel ist relevant für CG-2! 1 2 3 4 5 6 7 8 Historie, Überblick, Beispiele Begriffe und Grundlagen Objekttransforationen Objektrepräsentation und -Modellierung Sichttransforationen
Coputergrafik Inhalt Achtung! Kapitel ist relevant für CG-2! 1 2 3 4 5 6 7 8 Historie, Überblick, Beispiele Begriffe und Grundlagen Objekttransforationen Objektrepräsentation und -Modellierung Sichttransforationen
Polynome im Einsatz: Bézier-Kurven im CAD
 Polynome im Einsatz: Bézier-Kurven im CAD Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 25 Kurven im Raum Eine Kurve im
Polynome im Einsatz: Bézier-Kurven im CAD Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 25 Kurven im Raum Eine Kurve im
3 Geometrische Klassifikation der Bewegungen im R 2 und R 3
 3 Geometrische Klassifikation der Bewegungen im R 2 und R 3 Sei f : R n R n eine Bewegung Sie kann beschrieben werden in der Form Dabei ist T (f)(x) = A x f(x) = Ax + b mit A O(n) und b R n Definition:
3 Geometrische Klassifikation der Bewegungen im R 2 und R 3 Sei f : R n R n eine Bewegung Sie kann beschrieben werden in der Form Dabei ist T (f)(x) = A x f(x) = Ax + b mit A O(n) und b R n Definition:
Universität Bielefeld. Elementare Geometrie. Sommersemester Rückblick. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Rückblick Stefan Witzel Outline Grundlagen, Axiome Euklid I Bewegungen Verhältnisse, Ähnlichkeiten Kreise Fundamentale Objekte und Eigenschaften
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Rückblick Stefan Witzel Outline Grundlagen, Axiome Euklid I Bewegungen Verhältnisse, Ähnlichkeiten Kreise Fundamentale Objekte und Eigenschaften
Universität Bielefeld. Elementare Geometrie. Sommersemester Rückblick. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Rückblick Stefan Witzel Outline Grundlagen, Axiome Euklid I Bewegungen Verhältnisse, Ähnlichkeiten Kreise Fundamentale Objekte und Eigenschaften
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Rückblick Stefan Witzel Outline Grundlagen, Axiome Euklid I Bewegungen Verhältnisse, Ähnlichkeiten Kreise Fundamentale Objekte und Eigenschaften
Universität Bielefeld. Elementare Geometrie. Sommersemester Rückblick. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Rückblick Stefan Witzel Outline Grundlagen, Axiome Euklid I Bewegungen Verhältnisse, Ähnlichkeiten Kreise Fundamentale Objekte und Eigenschaften
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Rückblick Stefan Witzel Outline Grundlagen, Axiome Euklid I Bewegungen Verhältnisse, Ähnlichkeiten Kreise Fundamentale Objekte und Eigenschaften
Teil 2: Kurven und Flächen. Kurven und Flächen. Kurven. Parametrische Objekte. Kurven: 1D-Objekte Flächen: 2D-Objekte, basierend auf Kurven
 Parametrische Objekte Kurven und Flächen Kurven: 1D-Objekte Flächen: 2D-Objekte, basierend auf Kurven Kurven Welche Form der Darstellung? Beispiel: 2D-Linie Explizit: y = k x + d x = (x, y) T Implzit:
Parametrische Objekte Kurven und Flächen Kurven: 1D-Objekte Flächen: 2D-Objekte, basierend auf Kurven Kurven Welche Form der Darstellung? Beispiel: 2D-Linie Explizit: y = k x + d x = (x, y) T Implzit:
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.43 2018/05/15 16:07:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel Am Ende der letzten Sitzung hatten wir begonnen zwei weitere Aussagen über Winkel zu beweisen,
$Id: vektor.tex,v 1.43 2018/05/15 16:07:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel Am Ende der letzten Sitzung hatten wir begonnen zwei weitere Aussagen über Winkel zu beweisen,
Differentialgeometrische Eigenschaften von Kurven und Flächen
 Kapitel 5 Differentialgeometrische Eigenschaften von Kurven und Flächen Ziel dieses Abschnittes ist es, eine kurze Einführung in die Anfangsgründe der mathematischen Theorie der Raumkurven und Flächen
Kapitel 5 Differentialgeometrische Eigenschaften von Kurven und Flächen Ziel dieses Abschnittes ist es, eine kurze Einführung in die Anfangsgründe der mathematischen Theorie der Raumkurven und Flächen
κ Κα π Κ α α Κ Α
 κ Κα π Κ α α Κ Α Ζ Μ Κ κ Ε Φ π Α Γ Κ Μ Ν Ξ λ Γ Ξ Ν Μ Ν Ξ Ξ Τ κ ζ Ν Ν ψ Υ α α α Κ α π α ψ Κ α α α α α Α Κ Ε α α α α α α α Α α α α α η Ε α α α Ξ α α Γ Α Κ Κ Κ Ε λ Ε Ν Ε θ Ξ κ Ε Ν Κ Μ Ν Τ μ Υ Γ φ Ε Κ Τ θ
κ Κα π Κ α α Κ Α Ζ Μ Κ κ Ε Φ π Α Γ Κ Μ Ν Ξ λ Γ Ξ Ν Μ Ν Ξ Ξ Τ κ ζ Ν Ν ψ Υ α α α Κ α π α ψ Κ α α α α α Α Κ Ε α α α α α α α Α α α α α η Ε α α α Ξ α α Γ Α Κ Κ Κ Ε λ Ε Ν Ε θ Ξ κ Ε Ν Κ Μ Ν Τ μ Υ Γ φ Ε Κ Τ θ
Krummlinige Koordinaten
 Krummlinige Koordinaten Einige Koordinatensysteme im R 3 haben wir bereits kennengelernt : x, x 2, x 3... kartesische Koordinaten r, φ, x 3... Zylinderkoordinaten r, φ, ϑ... Kugelkoordinaten Sind andere
Krummlinige Koordinaten Einige Koordinatensysteme im R 3 haben wir bereits kennengelernt : x, x 2, x 3... kartesische Koordinaten r, φ, x 3... Zylinderkoordinaten r, φ, ϑ... Kugelkoordinaten Sind andere
Computational Geometry, MU Leoben
 Computational Geometry, MU Leoben www.unileoben.ac.at Computational Geometry Lehrveranstaltung: Darstellende Geometrie I, Übungen SS 2011 http://institute.unileoben.ac.at/anggeom/dg1 Übungsleiterin: S.
Computational Geometry, MU Leoben www.unileoben.ac.at Computational Geometry Lehrveranstaltung: Darstellende Geometrie I, Übungen SS 2011 http://institute.unileoben.ac.at/anggeom/dg1 Übungsleiterin: S.
Differentialgeometrie von Kurven und Flächen
 Differentialgeometrie von Kurven und Flächen Inhaltsverzeichnis:. Hilfsmittel Fritzsche 2. Parametrisierte Kurven Ballnus, 29.0. 3. Ebene Krümmung Ballnus, 05.. 4. Raumkurven Stergiou, 2.. 5. Globale Eigenschaften
Differentialgeometrie von Kurven und Flächen Inhaltsverzeichnis:. Hilfsmittel Fritzsche 2. Parametrisierte Kurven Ballnus, 29.0. 3. Ebene Krümmung Ballnus, 05.. 4. Raumkurven Stergiou, 2.. 5. Globale Eigenschaften
Approximationsverfahren für die Kurvendarstellung
 Approximationsverfahren für die Kurvendarstellung (a) Bézier-Kurven spezielle Form polynomialer Kurven spezifiziert durch n+1 Kontrollpunkte P 0, P 1,..., P n Kurve läuft nicht durch alle Kontrollpunkte,
Approximationsverfahren für die Kurvendarstellung (a) Bézier-Kurven spezielle Form polynomialer Kurven spezifiziert durch n+1 Kontrollpunkte P 0, P 1,..., P n Kurve läuft nicht durch alle Kontrollpunkte,
Angewandte Geometrie Semestralprüfung am 5. Juli 2005, Uhr
 Technische Universität München SS 2005 Zentrum Mathematik Blatt 7 apl. Prof. Dr. J. Hartl Angewandte Geometrie Semestralprüfung am 5. Juli 2005, 12.00-1.0 Uhr 1. In einem dreidimensionalen euklidischen
Technische Universität München SS 2005 Zentrum Mathematik Blatt 7 apl. Prof. Dr. J. Hartl Angewandte Geometrie Semestralprüfung am 5. Juli 2005, 12.00-1.0 Uhr 1. In einem dreidimensionalen euklidischen
1. Elementare Dreiecksgeometrie
 1. Elementare Dreiecksgeometrie Die Menge s A1B 2 der Punkte, die von zwei Punkten A und B gleich weit entfernt sind, bilden die Streckensymmetrale der Punkte A und B. Ist A B, so ist dies eine Gerade.
1. Elementare Dreiecksgeometrie Die Menge s A1B 2 der Punkte, die von zwei Punkten A und B gleich weit entfernt sind, bilden die Streckensymmetrale der Punkte A und B. Ist A B, so ist dies eine Gerade.
Lösungsvorschläge für die Geometrie-Klausur vom 28.7.
 Lösungsvorschläge für die Geometrie-Klausur vom 28.7. Aufgabe 1: (a) Die beiden Punkte liegen offensichtlich auf der hyperbolischen Geraden g = {z H R(z) = 1}. Die beiden idealen Punkte sind a = 1, b =.
Lösungsvorschläge für die Geometrie-Klausur vom 28.7. Aufgabe 1: (a) Die beiden Punkte liegen offensichtlich auf der hyperbolischen Geraden g = {z H R(z) = 1}. Die beiden idealen Punkte sind a = 1, b =.
Perspektive Vertiefung
 Perspektive Vertiefung Hans-Peter Schröcker Arbeitsbereich Geometrie und CAD, Universität Innsbruck Wintersemester 2007/08 Teil I Einleitung Organisatorisches Perspektive Vertiefung Seminar, 2 Std. Donnerstag,
Perspektive Vertiefung Hans-Peter Schröcker Arbeitsbereich Geometrie und CAD, Universität Innsbruck Wintersemester 2007/08 Teil I Einleitung Organisatorisches Perspektive Vertiefung Seminar, 2 Std. Donnerstag,
Übungen zur Vorlesung Differentialgeometrie I
 Sommersemester 2005 Blatt 12 1) Liouvillesche Flächen sind per definitionem solche, deren erste Fundamentalform sich in der Form E = G = U + V, F = 0, schreiben lassen, wobei U = U (u) bzw. V = V (v) in
Sommersemester 2005 Blatt 12 1) Liouvillesche Flächen sind per definitionem solche, deren erste Fundamentalform sich in der Form E = G = U + V, F = 0, schreiben lassen, wobei U = U (u) bzw. V = V (v) in
INGENIEURMATHEMATIK. 11. Differentialgeometrie. Sommersemester Prof. Dr. Gunar Matthies
 Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik INGENIEURMATHEMATIK 11. Differentialgeometrie Prof. Dr. Gunar Matthies Sommersemester 2016 G. Matthies Ingenieurmathematik
Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik INGENIEURMATHEMATIK 11. Differentialgeometrie Prof. Dr. Gunar Matthies Sommersemester 2016 G. Matthies Ingenieurmathematik
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 5 Punkte Ebenen im Raum Dualismus im Raum Die unendlich ferne Ebene Parametrische Darstellung (Span) Die Gerade im Raum -
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 5 Punkte Ebenen im Raum Dualismus im Raum Die unendlich ferne Ebene Parametrische Darstellung (Span) Die Gerade im Raum -
10.5 Differentialgeometrie ebener Kurven Tangente, Normale
 1.5 1.5 Differentialgeometrie ebener Kurven 1.5.1 Tangente, Normale Gegeben: Kurve C C := C := { (x { (x y) } y = f(x), a x b y ) x = ϕ(t) y = ψ(t), t 1 t t } oder C heißt glatte Kurve, wenn f stetig differenzierbar
1.5 1.5 Differentialgeometrie ebener Kurven 1.5.1 Tangente, Normale Gegeben: Kurve C C := C := { (x { (x y) } y = f(x), a x b y ) x = ϕ(t) y = ψ(t), t 1 t t } oder C heißt glatte Kurve, wenn f stetig differenzierbar
Universität Bielefeld. Elementare Geometrie. Sommersemester Gruppen, Bewegungen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Gruppen Eine Menge G von Bijektionen X X ist eine Gruppe, wenn 1. die Identität id: X X in G liegt, 2. für
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Gruppen, Bewegungen Stefan Witzel Gruppen Eine Menge G von Bijektionen X X ist eine Gruppe, wenn 1. die Identität id: X X in G liegt, 2. für
Die Abbildung (x 1 ;x 2 ) 7! (x 1 ;x 2 ; 1) ist eine Einbettung von R 2 in P 2 (als Mengen). Punkte mit z 6= 0 sind endliche" Punkte mit inhomogenen K
 7! (x 1 ;x 2 ; 1) ist eine Einbettung von R 2 in P 2 (als Mengen). Punkte mit z 6= 0 sind endliche Punkte mit inhomogenen K") Kapitel IV Projektive Geometrie In diesem Kapitel wird eine kurze Einführung in die projektive Geometrie gegeben. Es sollen unendlich ferne Punkte mit Hilfe von homogene Koordinaten eingeführt werden und
Kapitel IV Projektive Geometrie In diesem Kapitel wird eine kurze Einführung in die projektive Geometrie gegeben. Es sollen unendlich ferne Punkte mit Hilfe von homogene Koordinaten eingeführt werden und
Computational Geometry, MU Leoben
 Computational Geometry, MU Leoben www.unileoben.ac.at Computational Geometry Lehrveranstaltung: Darstellende Geometrie I, Übungen SS 2011 http://institute.unileoben.ac.at/anggeom/dg1 Übungsleiterin: S.
Computational Geometry, MU Leoben www.unileoben.ac.at Computational Geometry Lehrveranstaltung: Darstellende Geometrie I, Übungen SS 2011 http://institute.unileoben.ac.at/anggeom/dg1 Übungsleiterin: S.
Kapitel VI. Euklidische Geometrie
 Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
5.4 Affine Abbildungen in C 2 und R 2
 5.4 Affine Abbildungen in C 2 und R 2 Notation. Wir erinnern an die affine Ähnlichkeit von Matrizen (5.3.(ii)): L, L n (K). Dann: L a L 2 falls C AGL n (K) mit C L 2 C = L. Die aus 3.2.9 bekannte übliche
5.4 Affine Abbildungen in C 2 und R 2 Notation. Wir erinnern an die affine Ähnlichkeit von Matrizen (5.3.(ii)): L, L n (K). Dann: L a L 2 falls C AGL n (K) mit C L 2 C = L. Die aus 3.2.9 bekannte übliche
Unterteilungskurven und -flächen
 Unterteilungskurven und -flächen Martin Peternell TU Wien 30. Fortbildungstagung für Geometrie 2009, Strobl 1 Unterteilungskurven Allgemein Das wiederholte Unterteilen eines Polygons erzeugt in der Grenze
Unterteilungskurven und -flächen Martin Peternell TU Wien 30. Fortbildungstagung für Geometrie 2009, Strobl 1 Unterteilungskurven Allgemein Das wiederholte Unterteilen eines Polygons erzeugt in der Grenze
4. Geodätische Linien
 Gegeben ist eine Riemann sche Mannigfaltigkeit (M,, ) mit Levi-Civita-Zusammenhang D. Das Ziel ist es, ein Analogon für Geraden zu finden. Mögliche Charakterisierung von Geraden in der Euklidischen Geometrie
Gegeben ist eine Riemann sche Mannigfaltigkeit (M,, ) mit Levi-Civita-Zusammenhang D. Das Ziel ist es, ein Analogon für Geraden zu finden. Mögliche Charakterisierung von Geraden in der Euklidischen Geometrie
Klausurenkurs zum Staatsexamen (WS 2014/15): Differential und Integralrechnung 6
: Differential und Integralrechnung 6") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 204/5): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 204/5): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
1 Ableitungen. Definition: Eine Kurve ist eine Abbildung γ : I R R n, γ besteht also aus seinen Komponentenfunktionen. a 1 + tx 1. eine Kurve.
 1 Ableitungen Definition: Eine Kurve ist eine Abbildung γ : I R R n, γ besteht also aus seinen Komponentenfunktionen γ 1 (t) γ(t) = γ n (t) Bild(γ) = {γ(t) t I} heißt auch die Spur der Kurve Beispiel:1)
1 Ableitungen Definition: Eine Kurve ist eine Abbildung γ : I R R n, γ besteht also aus seinen Komponentenfunktionen γ 1 (t) γ(t) = γ n (t) Bild(γ) = {γ(t) t I} heißt auch die Spur der Kurve Beispiel:1)
11. Darstellung von Kurven und Flächen
 H.J. Oberle Approximation WS 23/4. Darstellung von Kurven und Flächen Bézier Kurven. Unser Ziel ist es, polynomiale Kurven auf dem Rechner möglichst effizient darzustellen. Hierzu nutzen wir die Basisdarstellung
H.J. Oberle Approximation WS 23/4. Darstellung von Kurven und Flächen Bézier Kurven. Unser Ziel ist es, polynomiale Kurven auf dem Rechner möglichst effizient darzustellen. Hierzu nutzen wir die Basisdarstellung
Technische Universität München Fakultät für Mathematik. Klausur. Geometriekalküle. Modul MA März 2018, 16:00 17:00 Uhr
 Technische Universität München Fakultät für Mathematik Klausur Geometriekalküle Modul MA2203 1. März 2018, 16:00 17:00 Uhr Prof. Dr. Dr. Jürgen Richter-Gebert Musterlösung Aufgabe 1. Kegelschnitt mit Parameter
Technische Universität München Fakultät für Mathematik Klausur Geometriekalküle Modul MA2203 1. März 2018, 16:00 17:00 Uhr Prof. Dr. Dr. Jürgen Richter-Gebert Musterlösung Aufgabe 1. Kegelschnitt mit Parameter
gekrümmte Flächen / Freiformflächen (analog zur Kurvendarstellung)
") 7. Modelle für Flächen gekrümmte Flächen / Freiformflächen (analog zur Kurvendarstellung) man unterscheidet 2 Typen: finite Interpolationen / Approximationen: endliche Zahl von Stützstellen / Kontrollpunkten
7. Modelle für Flächen gekrümmte Flächen / Freiformflächen (analog zur Kurvendarstellung) man unterscheidet 2 Typen: finite Interpolationen / Approximationen: endliche Zahl von Stützstellen / Kontrollpunkten
Affine Koordinatentransformationen
 Affine Koordinatentransformationen Medieninformatik IL Andreas Unterweger Vertiefung Medieninformatik Studiengang ITS FH Salzburg Wintersemester 017/18 Andreas Unterweger (FH Salzburg) Affine Koordinatentransformationen
Affine Koordinatentransformationen Medieninformatik IL Andreas Unterweger Vertiefung Medieninformatik Studiengang ITS FH Salzburg Wintersemester 017/18 Andreas Unterweger (FH Salzburg) Affine Koordinatentransformationen
Vektorräume und lineare Abbildungen
 Kapitel 11. Vektorräume und lineare Abbildungen 1 11.1 Vektorräume Sei K ein Körper. Definition. Ein Vektorraum über K (K-Vektorraum) ist eine Menge V zusammen mit einer binären Operation + einem ausgezeichneten
Kapitel 11. Vektorräume und lineare Abbildungen 1 11.1 Vektorräume Sei K ein Körper. Definition. Ein Vektorraum über K (K-Vektorraum) ist eine Menge V zusammen mit einer binären Operation + einem ausgezeichneten
0.1 Modellierung von Kurven und Flächen mittels B-Splines
 Vorlesung vom 28.04.06 Skript erstellt von Antonia Wittmers und Maria Gensel 0.1 Modellierung von Kurven und Flächen mittels B-Splines Das Wort Spline, übersetzt mit längliches, dünnes Stück Holz oder
Vorlesung vom 28.04.06 Skript erstellt von Antonia Wittmers und Maria Gensel 0.1 Modellierung von Kurven und Flächen mittels B-Splines Das Wort Spline, übersetzt mit längliches, dünnes Stück Holz oder
Mathematische Probleme, SS 2015 Montag $Id: quadratisch.tex,v /06/22 12:08:41 hk Exp $
 Mathematische Probleme, SS 15 Montag 6 $Id: quadratischtex,v 111 15/06/ 1:08:41 hk Exp $ 4 Kegelschnitte 41 Quadratische Gleichungen In der letzten Sitzung hatten wir die Normalform (1 ɛ )x + y pɛx p =
Mathematische Probleme, SS 15 Montag 6 $Id: quadratischtex,v 111 15/06/ 1:08:41 hk Exp $ 4 Kegelschnitte 41 Quadratische Gleichungen In der letzten Sitzung hatten wir die Normalform (1 ɛ )x + y pɛx p =
7. Wie lautet die Inverse der Verkettung zweier linearer Abbildungen? 9. Wie kann die Matrixdarstellung einer linearen Abbildung aufgestellt werden?
 Kapitel Lineare Abbildungen Verständnisfragen Sachfragen Was ist eine lineare Abbildung? Erläutern Sie den Zusammenhang zwischen Unterräumen, linearer Unabhängigkeit und linearen Abbildungen! 3 Was ist
Kapitel Lineare Abbildungen Verständnisfragen Sachfragen Was ist eine lineare Abbildung? Erläutern Sie den Zusammenhang zwischen Unterräumen, linearer Unabhängigkeit und linearen Abbildungen! 3 Was ist
[ ] (1) ( ) ( ) ( ) π 2, π 2 ( )
![[ ] (1) ( ) ( ) ( ) π 2, π 2 ( )](/thumbs/72/66438745.jpg "[ ] (1) ( ) ( ) ( ) π 2, π 2 ( )") Hans Walser, [20170718] Kosinusspindel Indirekte Anregung: F. H., B. 1 Worum geht es? Rotationsfläche mit einer Kosinuskurve als Meridian. 2 Parameterdarstellungen 2.1 Einheitskugel Wir gehen aus von der
Hans Walser, [20170718] Kosinusspindel Indirekte Anregung: F. H., B. 1 Worum geht es? Rotationsfläche mit einer Kosinuskurve als Meridian. 2 Parameterdarstellungen 2.1 Einheitskugel Wir gehen aus von der
Universität Bielefeld. Elementare Geometrie. Sommersemester Grundlagen. Stefan Witzel
 Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Universität Bielefeld Elementare Geometrie Sommersemester 2018 Grundlagen Stefan Witzel Punkte, Abstand Die Euklidische Ebene E 2 besteht aus Punkten. Zwei Punkte P, Q E 2 haben einen Abstand PQ 0. Axiome
Thema: Das Dreieck und seine Kreise. (Kapitel IV aus: Koecher, Krieg; Ebene Geometrie Seite )
") Universität Paderborn Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Mathematik Seminar zur Geometrie PD Dr. Martin Ekenhans Wintersemester 005/006 Thema: Das Dreieck und seine Kreise
Universität Paderborn Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Mathematik Seminar zur Geometrie PD Dr. Martin Ekenhans Wintersemester 005/006 Thema: Das Dreieck und seine Kreise
DARSTELLENDE GEOMETRIE I
 DARSTELLENDE GEOMETRIE I VON DR. RUDOLF BEREIS Professor und Direktor des Instituts für Geometrie an der Technischen Universität Dresden Mit 361 Abbildungen AKADEMIE-VERLAG BERLIN 1964 h. INHALT Hinweise
DARSTELLENDE GEOMETRIE I VON DR. RUDOLF BEREIS Professor und Direktor des Instituts für Geometrie an der Technischen Universität Dresden Mit 361 Abbildungen AKADEMIE-VERLAG BERLIN 1964 h. INHALT Hinweise
2 Die Dimension eines Vektorraums
 2 Die Dimension eines Vektorraums Sei V ein K Vektorraum und v 1,..., v r V. Definition: v V heißt Linearkombination der Vektoren v 1,..., v r falls es Elemente λ 1,..., λ r K gibt, so dass v = λ 1 v 1
2 Die Dimension eines Vektorraums Sei V ein K Vektorraum und v 1,..., v r V. Definition: v V heißt Linearkombination der Vektoren v 1,..., v r falls es Elemente λ 1,..., λ r K gibt, so dass v = λ 1 v 1
entspricht der Länge des Vektorpfeils. Im R 2 : x =
 Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
Proseminar HS Ebene algebraische Kurven Vortrag I.6. Duale Kurven. David Bürge 4. November 2010
 Proseminar HS 010 - Ebene algebraische Kurven Vortrag I.6 Duale Kurven David Bürge 4. November 010 1 1 1 1 Eine nierenförmige Kleinsche Quartik und ihre duale Kurve in R INHALTSVERZEICHNIS Inhaltsverzeichnis
Proseminar HS 010 - Ebene algebraische Kurven Vortrag I.6 Duale Kurven David Bürge 4. November 010 1 1 1 1 Eine nierenförmige Kleinsche Quartik und ihre duale Kurve in R INHALTSVERZEICHNIS Inhaltsverzeichnis
Implizite Funktionen. Ist für eine stetig differenzierbare Funktion f : R n R m R n. so lässt sich das Gleichungssystem
 Implizite Funktionen Ist für eine stetig differenzierbare Funktion f : R n R m R n f (x, y ) = (0,..., 0) t, det f x (x, y ) 0, so lässt sich das Gleichungssystem f k (x 1,..., x n, y 1,..., y m ) = 0,
Implizite Funktionen Ist für eine stetig differenzierbare Funktion f : R n R m R n f (x, y ) = (0,..., 0) t, det f x (x, y ) 0, so lässt sich das Gleichungssystem f k (x 1,..., x n, y 1,..., y m ) = 0,
Compressed Sensing für Signale aus Vereinigungen von Unterräumen
 Compressed Sensing für Signale aus Vereinigungen von Unterräumen Nadine Pawlitta 21. Januar 2011 Nadine Pawlitta () CS auf Vereinigungen von Unterräumen 21. Januar 2011 1 / 28 Übersicht 1 Grundprinzip
Compressed Sensing für Signale aus Vereinigungen von Unterräumen Nadine Pawlitta 21. Januar 2011 Nadine Pawlitta () CS auf Vereinigungen von Unterräumen 21. Januar 2011 1 / 28 Übersicht 1 Grundprinzip
15.5 Stetige Zufallsvariablen
 5.5 Stetige Zufallsvariablen Es gibt auch Zufallsvariable, bei denen jedes Elementarereignis die Wahrscheinlich keit hat. Beispiel: Lebensdauer eines radioaktiven Atoms Die Lebensdauer eines radioaktiven
5.5 Stetige Zufallsvariablen Es gibt auch Zufallsvariable, bei denen jedes Elementarereignis die Wahrscheinlich keit hat. Beispiel: Lebensdauer eines radioaktiven Atoms Die Lebensdauer eines radioaktiven
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.44 2018/05/17 14:11:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.6 Bewegungen und Kongruenzbegriffe Wir untersuchen gerade die Spiegelung an einer Hyperebene h R d. Ist ein
$Id: vektor.tex,v 1.44 2018/05/17 14:11:13 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.6 Bewegungen und Kongruenzbegriffe Wir untersuchen gerade die Spiegelung an einer Hyperebene h R d. Ist ein
Mathematische Grundlagen für die Vorlesung. Differentialgeometrie
 Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
6.4 Oberflächenintegrale 1. und 2. Art
 6.4 Oberflächenintegrale. und. Art 6.4. Integration über Flächen im Raum Es gibt verschiedene Möglichkeiten der arstellung von Flächen im Raum:. explizite arstellung als Graph z = f(x, y), was aber eigentlich
6.4 Oberflächenintegrale. und. Art 6.4. Integration über Flächen im Raum Es gibt verschiedene Möglichkeiten der arstellung von Flächen im Raum:. explizite arstellung als Graph z = f(x, y), was aber eigentlich
Block I: Integration und Taylorentwicklung in 1D
 Wiederholungsübungen zur Ingenieur-Mathematik III WS 5/6 Blatt 3..6 Block I: Integration und Taylorentwicklung in D Aufgabe : Berechnen Sie die Integrale: a) π sin x cos x dx b) ( x) +x dx c) x e x dx
Wiederholungsübungen zur Ingenieur-Mathematik III WS 5/6 Blatt 3..6 Block I: Integration und Taylorentwicklung in D Aufgabe : Berechnen Sie die Integrale: a) π sin x cos x dx b) ( x) +x dx c) x e x dx
Seite 1. sin 2 x dx. b) Berechnen Sie das Integral. e (t s)2 ds. (Nur Leibniz-Formel) c) Differenzieren Sie die Funktion f(t) = t. d dx ln(x + x3 ) dx
 Berechnen Sie das Integral. e (t s)2 ds. (Nur Leibniz-Formel) c) Differenzieren Sie die Funktion f(t) = t. d dx ln(x + x3 ) dx") Seite Aufgabe : a Berechnen Sie das Integral b Berechnen Sie das Integral +x x+x dx. π sin x dx. c Differenzieren Sie die Funktion ft = t e t s ds. Nur Leibniz-Formel a + x x + x dx = d dx lnx + x dx =
Seite Aufgabe : a Berechnen Sie das Integral b Berechnen Sie das Integral +x x+x dx. π sin x dx. c Differenzieren Sie die Funktion ft = t e t s ds. Nur Leibniz-Formel a + x x + x dx = d dx lnx + x dx =
2 Spiegelungen. d(f(p), f(q)) = d(p, q) für alle p, q R n
, f(q)) = d(p, q) für alle p, q R n") 2 Siegelungen Definition: f : R n R n heißt Bewegung (Isometrie), wenn f Abstände erhält, dh wenn d(f(), f(q)) = d(, q) für alle, q R n Kaitel IV, Satz 32: f ist genau dann eine Bewegung, wenn es eine
2 Siegelungen Definition: f : R n R n heißt Bewegung (Isometrie), wenn f Abstände erhält, dh wenn d(f(), f(q)) = d(, q) für alle, q R n Kaitel IV, Satz 32: f ist genau dann eine Bewegung, wenn es eine
1. und 2. Fundamentalform
 1. und 2. Fundamentalform regulärer Flächen Proseminar Differentialgeometrie Von Daniel Schliebner Herausgabe: 05. Dezember 2007 Daniel Schliebner 1. und 2. Fundamentalform regulärer Flächen Seite 1 6.1
1. und 2. Fundamentalform regulärer Flächen Proseminar Differentialgeometrie Von Daniel Schliebner Herausgabe: 05. Dezember 2007 Daniel Schliebner 1. und 2. Fundamentalform regulärer Flächen Seite 1 6.1
(u, v) z(u, v) u Φ(u, v) (v = const.) Parameterlinie v = const. v Φ(u, v) (u = const.) Parameterlinie u = const.
 z(u, v) u Φ(u, v) (v = const.) Parameterlinie v = const. v Φ(u, v) (u = const.) Parameterlinie u = const.") 13 Flächenintegrale 64 13 Flächenintegrale Im letzten Abschnitt haben wir Integrale über Kurven betrachtet. Wir wollen uns nun mit Integralen über Flächen beschäftigen. Wir haben bisher zwei verschiedene
13 Flächenintegrale 64 13 Flächenintegrale Im letzten Abschnitt haben wir Integrale über Kurven betrachtet. Wir wollen uns nun mit Integralen über Flächen beschäftigen. Wir haben bisher zwei verschiedene
47 Singulärwertzerlegung
 47 Singulärwertzerlegung 47.1 Motivation Wir haben gesehen, dass symmetrische Matrizen vollständig mithilfe ihrer Eigenwerte und Eigenvektoren beschrieben werden können. Diese Darstellung kann unmittelbar
47 Singulärwertzerlegung 47.1 Motivation Wir haben gesehen, dass symmetrische Matrizen vollständig mithilfe ihrer Eigenwerte und Eigenvektoren beschrieben werden können. Diese Darstellung kann unmittelbar
Grundzüge der Vektoranalysis
 KAPITEL 7 Grundzüge der Vektoranalysis 7. Satz von Green................................... 2 7.2 Satz von Stokes................................... 22 7.2. Zirkulation und Wirbelstärke..........................
KAPITEL 7 Grundzüge der Vektoranalysis 7. Satz von Green................................... 2 7.2 Satz von Stokes................................... 22 7.2. Zirkulation und Wirbelstärke..........................
3 Der Körper der komplexen Zahlen
 3 Der Körper der kompleen Zahlen Nicht jede quadratische Gleichung hat eine reelle Lösung + p + q = (p, q R) Beispiel: Für alle R ist und daher + 1 Abhilfe: Man erweitert R zu einem größerem Körper C,
3 Der Körper der kompleen Zahlen Nicht jede quadratische Gleichung hat eine reelle Lösung + p + q = (p, q R) Beispiel: Für alle R ist und daher + 1 Abhilfe: Man erweitert R zu einem größerem Körper C,
Berechnung von Formfaktoren
 Berechnung von Formfaktoren Oliver Deussen Formfaktorberechnung 1 Formfaktor ist eine Funktion in Abhängigkeit der Geometrie ist unabhängig von reflektierenden oder emittierenden Eigenschaften (ρ) der
Berechnung von Formfaktoren Oliver Deussen Formfaktorberechnung 1 Formfaktor ist eine Funktion in Abhängigkeit der Geometrie ist unabhängig von reflektierenden oder emittierenden Eigenschaften (ρ) der
Proseminar Bernsteinpolynome Bézier-Flächen. Dana Eckhardt Matr.-Nr:
 Proseminar Bernsteinpolynome Bézier-Flächen Dana Eckhardt Matr.-Nr: 4291637 Inhaltsverzeichnis 1 Einführung 2 1.1 Grundidee und Darstellung....................... 2 1.2 Satz 3.20.................................
Proseminar Bernsteinpolynome Bézier-Flächen Dana Eckhardt Matr.-Nr: 4291637 Inhaltsverzeichnis 1 Einführung 2 1.1 Grundidee und Darstellung....................... 2 1.2 Satz 3.20.................................
Lehrbuch der Konstruktiven Geometrie
 H. Brauner Lehrbuch der Konstruktiven Geometrie Springer-Verlag Wien New York Inhaltsverzeichnis Abbildungsverfahren der Darstellenden Geometrie 1. Elementargeometrische Grundlagen 1.1. Grundbegriffe 12
H. Brauner Lehrbuch der Konstruktiven Geometrie Springer-Verlag Wien New York Inhaltsverzeichnis Abbildungsverfahren der Darstellenden Geometrie 1. Elementargeometrische Grundlagen 1.1. Grundbegriffe 12
Splines. Bézier-Kurven. Beispiel zur Approximation. Interpolation & Approximation. Schiffbau Automobilbau Architektur. f(x) f(x) =
 f(x) =") Institut für Geometrie Abteilung für Geometrie im Bauwesen und im Scientific Computing Prof. Dr. H. Pottmann Interpolation & Approximation Splines Geg: Menge von Punkten Ges: Kurve, welche die Punkte interpoliert
Institut für Geometrie Abteilung für Geometrie im Bauwesen und im Scientific Computing Prof. Dr. H. Pottmann Interpolation & Approximation Splines Geg: Menge von Punkten Ges: Kurve, welche die Punkte interpoliert
Weitere Beispiele zur Raumgeometrie
 Weitere Beispiele zur GeoGebra kann mit Vektoren und Matrizen rechnen, z.b. über ein Lineares Gleichungssystem den Schnitt Gerade-Ebene oder über das Vektorprodukt der Richtungen die Normale einer Ebene
Weitere Beispiele zur GeoGebra kann mit Vektoren und Matrizen rechnen, z.b. über ein Lineares Gleichungssystem den Schnitt Gerade-Ebene oder über das Vektorprodukt der Richtungen die Normale einer Ebene
Klausur zu Analysis II - Lösungen
 Mathematisches Institut der Heinrich-Heine-Universität Düsseldorf Dr. Axel Grünrock WS 1/11 11..11 Klausur zu Analysis II - Lösungen 1. Entscheiden Sie, ob die folgenden Aussagen richtig oder falsch sind.
Mathematisches Institut der Heinrich-Heine-Universität Düsseldorf Dr. Axel Grünrock WS 1/11 11..11 Klausur zu Analysis II - Lösungen 1. Entscheiden Sie, ob die folgenden Aussagen richtig oder falsch sind.
K A N T O N S S C H U L E I M L E E MATHEMATIK. Grafiktaschenrechner ohne CAS, beliebige Formelsammlung
 K A N T O N S S C H U L E I M L E E W I N T E R T H U R MATURITÄTSPRÜFUNGEN 06 Klasse: 4g Profil: MN Lehrperson: Rolf Kleiner MATHEMATIK Zeit: 3 Stunden Erlaubte Hilfsmittel: Grafiktaschenrechner ohne
K A N T O N S S C H U L E I M L E E W I N T E R T H U R MATURITÄTSPRÜFUNGEN 06 Klasse: 4g Profil: MN Lehrperson: Rolf Kleiner MATHEMATIK Zeit: 3 Stunden Erlaubte Hilfsmittel: Grafiktaschenrechner ohne
Klausurenkurs zum Staatsexamen (SS 2015): Differential und Integralrechnung 6
: Differential und Integralrechnung 6") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 205): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 205): Differential und Integralrechnung 6 6. (Frühjahr 2009, Thema, Aufgabe 3) Sei r > 0. Berechnen Sie die Punkte auf der Parabel y = x 2 mit dem
Normalengleichungen. Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b,
 Normalengleichungen Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b, Normalengleichungen 1-1 Normalengleichungen Für eine beliebige
Normalengleichungen Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b, Normalengleichungen 1-1 Normalengleichungen Für eine beliebige
Prüfungsklausur Mathematik I für Bauingenieure am
 HTWD, Fakultät Informatik/Mathematik Prof. Dr. M. Voigt Prüfungsklausur Mathematik I für Bauingenieure am 9.02.204 B Name, Vorname Matr. Nr. Sem. gr. Aufgabe 2 3 4 6 7 8 9 0 gesamt erreichbare P. 8 0 3
HTWD, Fakultät Informatik/Mathematik Prof. Dr. M. Voigt Prüfungsklausur Mathematik I für Bauingenieure am 9.02.204 B Name, Vorname Matr. Nr. Sem. gr. Aufgabe 2 3 4 6 7 8 9 0 gesamt erreichbare P. 8 0 3
Aufgabe 1. Die Determinante ist eine lineare Abbildung von C n n nach C? Nein (außer für n = 1). Es gilt det(λa) = (λ) n det(a).
. Es gilt det(λa) = (λ) n det(a).") Aufgabe Die Determinante ist eine lineare Abbildung von C n n nach C? Nein (außer für n = Es gilt det(λa = (λ n det(a det I n = n? Nein (außer für n = Es gilt deti n = det(ab = det A det B? Ja det(a =
Aufgabe Die Determinante ist eine lineare Abbildung von C n n nach C? Nein (außer für n = Es gilt det(λa = (λ n det(a det I n = n? Nein (außer für n = Es gilt deti n = det(ab = det A det B? Ja det(a =
Transformation mehrdimensionaler Integrale
 Transformation mehrdimensionaler Integrale Für eine bijektive, stetig differenzierbare Transformation g eines regulären Bereiches U R n mit det g (x), x U, gilt für stetige Funktionen f : f g det g du
Transformation mehrdimensionaler Integrale Für eine bijektive, stetig differenzierbare Transformation g eines regulären Bereiches U R n mit det g (x), x U, gilt für stetige Funktionen f : f g det g du
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 3 Der Axiator Eigenschaften des Axiators Bestimmung des Kegelschnitts Geometrische Betrachtungen Dualer Kegelschnitt Pol-Polare
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 3 Der Axiator Eigenschaften des Axiators Bestimmung des Kegelschnitts Geometrische Betrachtungen Dualer Kegelschnitt Pol-Polare
Computergraphik I. Freiformkurven. aus: Farin Curven und Flächen im CAGD. Oliver Deussen Freiformkurven 1
 Freiformkurven aus: Farin Curven und Flächen im CAGD Oliver Deussen Freiformkurven 1 Definition für gebogene Kurven und Flächen Anwendungen: CAD: Automobil-, Flugzeug-, Schiffsbau Computergraphik: Objektmodellierung
Freiformkurven aus: Farin Curven und Flächen im CAGD Oliver Deussen Freiformkurven 1 Definition für gebogene Kurven und Flächen Anwendungen: CAD: Automobil-, Flugzeug-, Schiffsbau Computergraphik: Objektmodellierung
Lineare Algebra und analytische Geometrie
 Lineare Algebra und analytische Geometrie von Günther Eisenreich Mit 107 Abbildungen und 2 Tabellen 3., erweiterte und berichtigte Auflage Akademie Verlag Inhaltsverzeichnis A. Allgemeine Vorbemerkungen
Lineare Algebra und analytische Geometrie von Günther Eisenreich Mit 107 Abbildungen und 2 Tabellen 3., erweiterte und berichtigte Auflage Akademie Verlag Inhaltsverzeichnis A. Allgemeine Vorbemerkungen
WS 2010/ Januar Mathematisches Institut der Universität München Prof. Dr. Rudolf Fritsch
 Mathematisches Institut der Universität München Prof. Dr. Rudolf Fritsch WS 2010/2011 14. Januar 2011 Geometrie mit Übungen Übungsblatt 9, Musterlösungen Aufgabe 33. Es werden Kreise in der Euklidischen
Mathematisches Institut der Universität München Prof. Dr. Rudolf Fritsch WS 2010/2011 14. Januar 2011 Geometrie mit Übungen Übungsblatt 9, Musterlösungen Aufgabe 33. Es werden Kreise in der Euklidischen
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.21 2017/05/13 16:28:55 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
$Id: vektor.tex,v 1.21 2017/05/13 16:28:55 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
Das Gleichlauf-Kugelgelenk ein Beispiel zum anwendungsorientierten Unterricht in Darstellender Geometrie
 Proceedings SDG Symposium Darstellende Geometrie, Dresden 15.-17.6.2000 (ISBN 3-86005-258-6), 151 156 Das Gleichlauf-Kugelgelenk ein Beispiel zum anwendungsorientierten Unterricht in Darstellender Geometrie
Proceedings SDG Symposium Darstellende Geometrie, Dresden 15.-17.6.2000 (ISBN 3-86005-258-6), 151 156 Das Gleichlauf-Kugelgelenk ein Beispiel zum anwendungsorientierten Unterricht in Darstellender Geometrie
Lineare Algebra: Determinanten und Eigenwerte
 : und Eigenwerte 16. Dezember 2011 der Ordnung 2 I Im Folgenden: quadratische Matrizen Sei ( a b A = c d eine 2 2-Matrix. Die Determinante D(A (bzw. det(a oder Det(A von A ist gleich ad bc. Det(A = a b
: und Eigenwerte 16. Dezember 2011 der Ordnung 2 I Im Folgenden: quadratische Matrizen Sei ( a b A = c d eine 2 2-Matrix. Die Determinante D(A (bzw. det(a oder Det(A von A ist gleich ad bc. Det(A = a b
Darstellung von Kurven und Flächen
 Darstellung von Kurven und Flächen Technische Universität Dresden Fakultät Informatik Institut für Software- und Multimediatechnik Dozent: Dr. Mascolous Referent: Gliederung / Einleitung 1 / 25 1. Kurven
Darstellung von Kurven und Flächen Technische Universität Dresden Fakultät Informatik Institut für Software- und Multimediatechnik Dozent: Dr. Mascolous Referent: Gliederung / Einleitung 1 / 25 1. Kurven
7 Die Hamilton-Jacobi-Theorie
 7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
13 Lineare Abbildungen
 13 Lineare Abbildungen Grob gesprochen sind lineare Abbildungen bei Vektorräumen dasselbe wie Homomorphismen bei Gruppen, nämlich strukturerhaltende Abbildungen. Auch in diesem Kapitel seien V, W Vektorräume.
13 Lineare Abbildungen Grob gesprochen sind lineare Abbildungen bei Vektorräumen dasselbe wie Homomorphismen bei Gruppen, nämlich strukturerhaltende Abbildungen. Auch in diesem Kapitel seien V, W Vektorräume.
6. Polynom-Interpolation
 6. Polynom-Interpolation 1 6.1. Klassische Polynom-Interpolation 2 6.2. Lösung mit Hilfe Lagrange scher Basisfunktionen 3 6.3. Lösung mit Hilfe Newton scher Basisfunktionen 4 6.4. Fehlerabschätzung für
6. Polynom-Interpolation 1 6.1. Klassische Polynom-Interpolation 2 6.2. Lösung mit Hilfe Lagrange scher Basisfunktionen 3 6.3. Lösung mit Hilfe Newton scher Basisfunktionen 4 6.4. Fehlerabschätzung für
Lineare Algebra und Numerische Mathematik für D-BAUG
 P Grohs T Welti F Weber Herbstsemester 215 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 12 Aufgabe 121 Matrixpotenzen und Eigenwerte Diese Aufgabe ist
P Grohs T Welti F Weber Herbstsemester 215 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 12 Aufgabe 121 Matrixpotenzen und Eigenwerte Diese Aufgabe ist
4 Lineare Abbildungen und Matrizen
 Mathematik I für inf/swt, Wintersemester /, Seite 8 4 Lineare Abbildungen und Matrizen 4 Kern und Injektivität 4 Definition: Sei : V W linear Kern : {v V : v } ist linearer eilraum von V Ü68 und heißt
Mathematik I für inf/swt, Wintersemester /, Seite 8 4 Lineare Abbildungen und Matrizen 4 Kern und Injektivität 4 Definition: Sei : V W linear Kern : {v V : v } ist linearer eilraum von V Ü68 und heißt
Abbildung 10.1: Das Bild zu Beispiel 10.1
 Analysis 3, Woche Mannigfaltigkeiten I. Definition einer Mannigfaltigkeit Die Definition einer Mannigfaltigkeit braucht den Begriff Diffeomorphismus, den wir in Definition 9.5 festgelegt haben. Seien U,
Analysis 3, Woche Mannigfaltigkeiten I. Definition einer Mannigfaltigkeit Die Definition einer Mannigfaltigkeit braucht den Begriff Diffeomorphismus, den wir in Definition 9.5 festgelegt haben. Seien U,
Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Mayr)
") WS 2011/12 Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Mayr) Dr. Werner Meixner Fakultät für Informatik TU München http://www14.in.tum.de/lehre/2011ws/ds/uebung/ 18. Januar 2012 ZÜ DS ZÜ XII
WS 2011/12 Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Mayr) Dr. Werner Meixner Fakultät für Informatik TU München http://www14.in.tum.de/lehre/2011ws/ds/uebung/ 18. Januar 2012 ZÜ DS ZÜ XII
1.5 Kongruenz und Ähnlichkeit
 19 1.5 Kongruenz und Ähnlichkeit Definition Sei A n der affine Standardraum zum Vektorraum R n. Eine Abbildung F : A n A n heißt Isometrie, falls d(f (X), F (Y )) = d(x, Y ) für alle X, Y A n gilt. Es
19 1.5 Kongruenz und Ähnlichkeit Definition Sei A n der affine Standardraum zum Vektorraum R n. Eine Abbildung F : A n A n heißt Isometrie, falls d(f (X), F (Y )) = d(x, Y ) für alle X, Y A n gilt. Es
Die Lösungen einer autonomen Differentialgleichung zweiter Ordnung,
 Phasenebene Die Lösungen einer autonomen Differentialgleichung zweiter Ordnung, können als Kurven u = f (u, u ), t (u(t), v(t)), v = u, in der sogenannten Phasenebene visualisiert werden. Dabei verläuft
Phasenebene Die Lösungen einer autonomen Differentialgleichung zweiter Ordnung, können als Kurven u = f (u, u ), t (u(t), v(t)), v = u, in der sogenannten Phasenebene visualisiert werden. Dabei verläuft
Lemniskaten und eine Strophoide des Dreiecks
 Lemniskaten und eine Strophoide des Dreiecks Eckart Schmidt Spiegelt man Umkegelschnitte eines Dreiecks am Umkreis, so erhält man im allgemeinen Kurven vierter Ordnung. Hier werden nur gleichseitige Umhyperbeln
Lemniskaten und eine Strophoide des Dreiecks Eckart Schmidt Spiegelt man Umkegelschnitte eines Dreiecks am Umkreis, so erhält man im allgemeinen Kurven vierter Ordnung. Hier werden nur gleichseitige Umhyperbeln
Brückenkurs Mathematik. Mittwoch Freitag
 Brückenkurs Mathematik Mittwoch 5.10. - Freitag 14.10.2016 Vorlesung 4 Dreiecke, Vektoren, Matrizen, lineare Gleichungssysteme Kai Rothe Technische Universität Hamburg-Harburg Montag 10.10.2016 0 Brückenkurs
Brückenkurs Mathematik Mittwoch 5.10. - Freitag 14.10.2016 Vorlesung 4 Dreiecke, Vektoren, Matrizen, lineare Gleichungssysteme Kai Rothe Technische Universität Hamburg-Harburg Montag 10.10.2016 0 Brückenkurs
Geometrie Herbstsemester 2013
 Geometrie Herbstsemester 203 D-MATH Prof. Felder Lösungen 3 ) (a) Wir verwenden die Zykelschreibweise für die Elemente von S n, so dass S 3 = {(), (2), (3), (23), (23), (32)} Die Gruppe besteht also aus
Geometrie Herbstsemester 203 D-MATH Prof. Felder Lösungen 3 ) (a) Wir verwenden die Zykelschreibweise für die Elemente von S n, so dass S 3 = {(), (2), (3), (23), (23), (32)} Die Gruppe besteht also aus
1. Grundlagen der ebenen Kinematik
 Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Weitere geometrische Abbildungen
 Weitere geometrische Abbildungen Anna Wegener, Matthias Wegen, Daniel Kretschmer 15.01.2015 1 / 38 Affinitätsabbildungen - Motivation Kongruenzabbildungen Ähnlichkeitsabbildungen Affinitätsabbildungen
Weitere geometrische Abbildungen Anna Wegener, Matthias Wegen, Daniel Kretschmer 15.01.2015 1 / 38 Affinitätsabbildungen - Motivation Kongruenzabbildungen Ähnlichkeitsabbildungen Affinitätsabbildungen
Billard auf polygonförmigen Tischen
 Billard auf polygonförmigen Tischen Myriam Freidinger 1 Der Fagnano Billardstrahl im Dreieck Lemma 1. Sei ABC ein spitzwinkliges Dreieck und P,Q und R die Basispunkte der Höhen von A,B und C, dann beschreibt
Billard auf polygonförmigen Tischen Myriam Freidinger 1 Der Fagnano Billardstrahl im Dreieck Lemma 1. Sei ABC ein spitzwinkliges Dreieck und P,Q und R die Basispunkte der Höhen von A,B und C, dann beschreibt
Elementare Geometrie Vorlesung 4
 Elementare Geometrie Vorlesung 4 Thomas Zink 3.5.2017 1. Der Drehwinkel zwischen zwei Strahlen Es seien s und t zwei Strahlen in der Ebene mit dem gleichen Anfangspunkt A. Man legt ein Ziffernblatt um
Elementare Geometrie Vorlesung 4 Thomas Zink 3.5.2017 1. Der Drehwinkel zwischen zwei Strahlen Es seien s und t zwei Strahlen in der Ebene mit dem gleichen Anfangspunkt A. Man legt ein Ziffernblatt um
Parametrisierung und Integralsätze
 Parametrisierung und Integralsätze 2. März 2 Integration in der Ebene. Defintion: eien w,..., w n stückweise reguläre, einfach geschlossene Kurven in R 2, seien W,..., W n die von diesen Wegen umschlossene
Parametrisierung und Integralsätze 2. März 2 Integration in der Ebene. Defintion: eien w,..., w n stückweise reguläre, einfach geschlossene Kurven in R 2, seien W,..., W n die von diesen Wegen umschlossene
Mathematische Kurven sind uns aus den verschiedensten Zusammenhängen vertraut. Wir stellen hier kurz die wichtigsten Begriffe zusammen.
 10.1. Ebene Kurven Mathematische Kurven sind uns aus den verschiedensten Zusammenhängen vertraut. Wir stellen hier kurz die wichtigsten Begriffe zusammen. Parameterdarstellungen einer Kurve sind stetige
10.1. Ebene Kurven Mathematische Kurven sind uns aus den verschiedensten Zusammenhängen vertraut. Wir stellen hier kurz die wichtigsten Begriffe zusammen. Parameterdarstellungen einer Kurve sind stetige
Abitur 2016 Mathematik Geometrie V
 Seite http://www.abiturloesung.de/ Seite Abitur Mathematik Geometrie V Betrachtet wird der abgebildete Würfel A B C D E F G H. Die Eckpunkte D, E, F und H dieses Würfels besitzen in einem kartesischen
Seite http://www.abiturloesung.de/ Seite Abitur Mathematik Geometrie V Betrachtet wird der abgebildete Würfel A B C D E F G H. Die Eckpunkte D, E, F und H dieses Würfels besitzen in einem kartesischen
solche Permutationen. Für n von 1 bis 8 ergeben sich folgende Zahlen: [ ]
![solche Permutationen. Für n von 1 bis 8 ergeben sich folgende Zahlen: [ ]](/thumbs/78/78326180.jpg "solche Permutationen. Für n von 1 bis 8 ergeben sich folgende Zahlen: [ ]") 5A Permutationen Symmetrien geometrischer Figuren beschreibt man mathematisch durch Vertauschungen einer gewissen Anzahl von Punten, welche die Gesamtfigur unverändert lassen Beispiel : Drehungen und Spiegelungen
5A Permutationen Symmetrien geometrischer Figuren beschreibt man mathematisch durch Vertauschungen einer gewissen Anzahl von Punten, welche die Gesamtfigur unverändert lassen Beispiel : Drehungen und Spiegelungen