Interpolationsverfahren
|
|
|
- Judith Pohl
- vor 7 Jahren
- Abrufe
Transkript
1 Kapitel 3 Interpolationsverfahren Peter-Wolfgang Gräber Systemanalyse in der Wasserwirtschaft

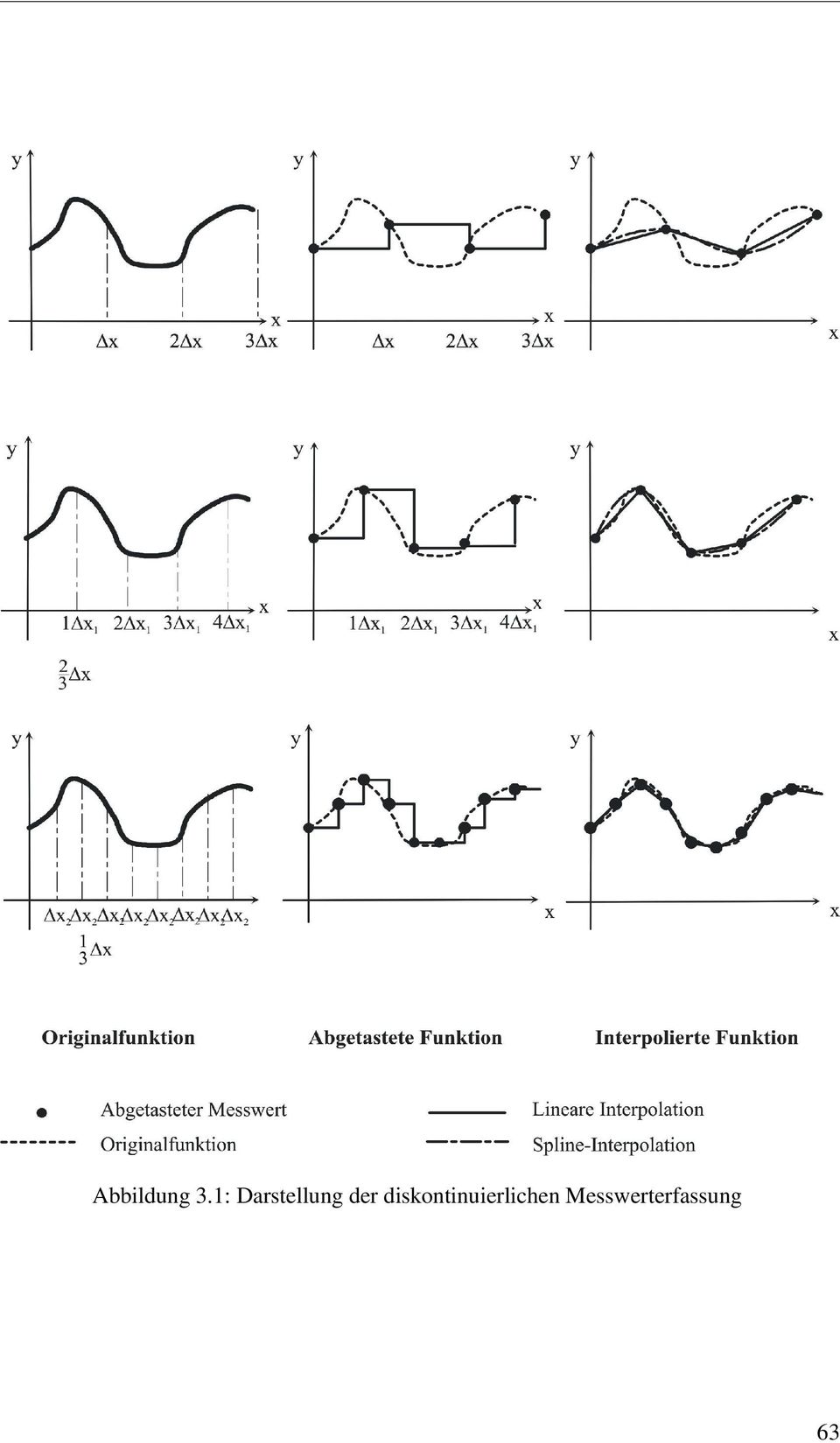
2 KAPITEL 3 INTERPOLATIONSVERFAHREN Problem: Durch Messung sind einige Messwerte (abhängige Variable) in Abhängigkeit von unabhängigen Varibablen im ein-, zwei-, drei- oder vierdimensionalen Raum, der im Allgemeinen durch die drei Raumkoordinaten (je nach Koordinatensystem zb x n y n z n oder r n α n z n oder r n α n ϑ n (siehe Kapitel Vektorrechnung, Seite 47)) und die Zeit t n gebildet wird, bekannt Man hat in diesem Fall diskontinuierliche Wertetabellen Für den eindimensionalen Fall gilt z B: Unabhängige Variable Abhängige Variable x 0 y 0 = f (x 0 ) x 1 y 1 = f (x 1 ) x n y n = f (x n ) Die Stellen x 0 x 1 x n werden als so genannte Stützstellen bezeichnet, die y 0 y 1 y n als Stützwerte Werden Funktionswerte gesucht, deren unabhängige Variable innerhalb des Bereiches (x 0 x n ) liegen, spricht man von Interpolation Sollen dagegen Funktionswerte für unabhängige Variable außerhalb des Bereiches (x 0 x n ) gesucht werden, wird dies Extrapolation genannt Durch die Interpolation bzw Extrapolation wird eine kontinuierliche Ersatzfunktion w = p(x) gesucht, die die Originalfunktion y n = f (x n ) möglichst genau widerspiegelt (siehe Abbildung 31) Dabei ist immer davon auszugehen, dass die Ersatzfunktion nur an den Stützstellen mit der Originalfunktion übereinstimmt Für den dazwischen liegenden Raum hängt die Genauigkeit, dh die Übereinstimmung der beiden Funktionen, von der Anzahl und der Verteilung der Stützstellen ab Entsprechend dem Abtasttheorem nimmt der Quantisierungsfehler proportional zum Anstieg der Funktion zu Beachte: Kein Interpolationsalgorithmus kann als Ersatz für eine Vergrößerung der Messwertdichte benutzt werden Mittels der Interpolationsalgorithmen erhält man immer nur Näherungswerte 6
 Die Stellen x 0 x 1 x n werden als so genannte Stützstellen bezeichnet, die y 0 y 1 y n als Stützwerte Werden Funktionswerte gesucht, deren unabhängige Variable innerhalb des Bereiches (x 0 x n )")
3 Abbildung 31: Darstellung der diskontinuierlichen Messwerterfassung 63
4 KAPITEL 3 INTERPOLATIONSVERFAHREN Beispiel zur Anwendung von Interpolationen: Die Schadstoffkonzentration C(x), die von einer Altlast ausgeht, wird an den Stellen x 0 x 1 x gemessen (siehe Abbildung 3) Die Schadstoffkonzentration, die als Gefahr an der Stelle x F l in den Fluss fließen kann, soll durch Interpolation abgeschätzt werden Dabei soll eine Aussage erfolgen, ob dieser Wert den zulässigen Grenzwert überschreitet Abbildung 3: Darstellung eines Interpolationsproblems x 0 C 0 = f (x 0 ) x 1 C 1 = f (x 1 ) x F l? x C = f (x ) Zur Lösung dieses Problems wird eine Interpolationsfunktion w = p (x) als Ersatz für die Funktion C n = f (x n ) gesucht Diese Funktion soll folgende Voraussetzung erfüllen: dh w i = p (x i ) = C i (31) w 0 = p (x 0 ) = C 0 (3) w 1 = p (x 1 ) = C 1 w n = p (x n ) = C n Dann wird angenommen, dass sich die Zwischenwerte der Funktion w = p (x) den Zwischenwerten der Funktion C n = f (x n ) mit guter Näherung angleichen 64
 Zur Lösung dieses Problems wird eine Interpolationsfunktion w = p (x) als Ersatz für die Funktion C n = f (x n ) gesucht Diese Funktion soll folgende Voraussetzung erfüllen: dh w i = p")
5 Zur Bestimmung der Funktion w = p (x) können verschiedene Interpolationverfahren verwendet werden Man unterscheidet dabei die ein- und die mehrdimensionalen Verfahren Die mehrdimensionalen Verfahren spielen im Zusammenhang mit den Geografischen Informationssystemen (GIS) eine wesentliche Rolle und werden auch oft im Zusammenhang mit den Verfahren der Geostatistik betrachtet Im Folgenden sollen einige der im Zusammenhang mit wasserwirtschaftlichen Fragestellungen benutzten Verfahren vorgestellt werden Polynominterpolation Interpolierende Polynomteilstücke (Spline) Kriging-Verfahren 65
")
6 31 Polynominterpolation Bei diesem Verfahren hat p (x) die Form eines algebraischen Polynoms n-ten Grades: w = p (x) = a 0 + a 1 x + a x + + a n x n (33) Dies weist den Vorteil auf, dass Zwischenwerte möglichst leicht zu berechnen sind Geht man von einer Messwerttabelle mit n + 1 Wertepaaren aus, so lässt sich maximal genau ein Polynom n-ten Grades dazu ermitteln: mit der Eigenschaft: y := p n (x) = y(x i ) p(x i ) = n a k x k (34) k=0 n a k x k i = w i (35) Dieses Polynom ist das Interpolationspolynom zu dem gegebenen System von Interpolationsstützstellen In der Regel werden Polynome niedrigen Grades (n 3) gesucht, die die Wertepaare zumindest stückweise anpassen: p (x) = a 0 + a 1 x lineare Interpolation p (x) = a 0 + a 1 x + a x quadratische Interpolation p (x) = a 0 + a 1 x + a x + a 3 x 3 kubische Interpolation Der Einsatz von Polynomen höheren Grades erschwert die Rechenarbeit und führt zu sehr große Schwankungen Aus den verschiedenen Darstellungsformen für Polynome ergeben sich auch die verschiedenen Interpolationsverfahren zur Bestimmung der Koeffizienten a i des Polynoms n-ten Grades Diese verschiedenen Verfahren führen alle zu dem selben Polynom So werden die Interpolationsformeln unterschieden nach: analytische Potenzfunktion LAGRANGE AIKEN NEWTON k=0 Systemanalyse in der Wasserwirtschaft Peter-Wolfgang Gräber
 gesucht, die die Wertepaare zumindest stückweise anpassen: p (x) = a 0 + a 1 x lineare Interpolation p (x) = a 0 + a 1 x + a x quadratische Interpolation")
7 31 POLYNOMINTERPOLATION 311 Analytische Potenzfunktionen Dieser Polynomansatz geht davon aus, dass das Polynom w = p (x) für jede Stützstelle die Bedingung y(x i ) = p(x i ) erfüllt Man erhält in diesem Fall für die n + 1 Stützstellen n + 1 Gleichungen mit den n + 1 Unbekannten a 0 bis a n a 0 + a 1 x 0 + a x a nx n 0 = y 0 a 0 + a 1 x 1 + a x a nx n 1 = y 1 a 0 + a 1 x n + a x n + + a n x n n = y n (36) Dieses Gleichungssystem kann in gewohnter Weise auch als Matrixgleichung geschrieben werden: X A = Y Mit: 1 x 0 x 0 x n 0 1 x 1 x 1 x n 1 X = 1 x x x n 1 x n x n x n n A = a 0 a 1 a a n Y = y 0 y 1 y y n Dabei ist zu beachten, dass die Matrix X die bekannten Koeffizienten und Y die rechte Seite darstellen, wobei hier die Matrix A den gesuchten Lösungsvektor darstellt Das LGS kann mit allen bekannten Methoden (siehe Abschnitt 13 Lösung von Gleichungssystemen, Seite ) gelöst werden Die Determinante dieses linearen Gleichungssystems (LGS) ist: 1 x 0 x n 0 1 x 1 x n 1 D = = 1 x n x n n und wird als VANDERMONDsche Determinante bezeichnet (x 1 x 0 ) (x x 0 ) (x 3 x 0 ) (x n x 0 ) (x x 1 ) (x 3 x 1 ) (x n x 1 ) (x 3 x ) (x n x ) (x n 1 x n ) (x n x n ) (x n x n 1 ) Da alle Stützstellen verschieden von einander sind (sein müssen), ist D = 0 und das LGS eindeutig lösbar Es existiert genau ein Polynom n-ten Grades, das die Werte y i = f (x i ) annimmt und deren Koeffizienten sich ergeben zu (vgl Abschnitt 13 Determinanten, Seite 19): (37) a 0 = D a 0 D, a 1 = D a 1 D, a n = D an D Mit diesen Koeffizienten erhält man das gesuchte Interpolationspolynom zu: (38) y(x) p(x) = a 0 + a 1 x + a x + + a n x n Der gesuchte Interpolationswert an der Stelle x P ergibt sich damit zu: y(x P ) p(x P ) = a 0 + a 1 x P + a x P + + a n x n P 67

8 KAPITEL 3 INTERPOLATIONSVERFAHREN Obwohl bei diesem Verfahren der Ansatz sehr einfach ist, erfordert die endgültige Bestimmung des Interpolationspolynoms einen erheblichen Rechenaufwand, besonders wenn eine größere Anzahl von Stützwerten zu berücksichtigen ist Beispiel zur Anwendung der Interpolation nach dem Polynomansatz: Gesucht sind ein quadratisches Polynom, das die Werte der folgenden Tabelle annehmen soll, und der Wert y = f 1 an der Stelle x = 1 x 0 1 y Da nur drei Stützstellen vorhanden sind, kann das Polynom nur vom zweiten Grad sein Ein quadratisches Polynom hat die Form: p (x) = a 0 + a 1 x + a x Es muss gelten: y i = p (x i ) y i = a 0 + a 1 x i + a x i p (0) = 0 = a 0 + a a 0 = 0 = a 0 = 0 p (1) = 1 = a 0 + a a 1 = 1 = a 1 + a = 1 p () = 0 = a 0 + a 1 + a = 0 = a 1 + 4a = 0 Aus den drei Gleichungen folgt: Damit lautet das Interpolationspolynom: a 0 = 0 a 1 = a = 1 p (x) = x x Mit dieser Funktion kann der gesuchte Funktionswert an der Stelle x = 1 berechnet werden: 1 1 f p 1 p = f
 = a 0 + a 1 x + a x Es muss gelten: y i = p (x i ) y i = a 0 + a 1 x i + a x i p (0) = 0 = a 0 + a 1 0 + a 0 = 0 = a 0 = 0 p (1) = 1 = a 0 + a 1 1 + a 1 = 1 = a 1 + a = 1 p () = 0 = a 0 +")
9 31 POLYNOMINTERPOLATION 31 Interpolationsformel von LAGRANGE LAGRANGE hat die Interpolationsfunktion in folgender Form geschrieben: y(x P ) p (x P ) = L 0 (x P ) y 0 + L 1 (x P ) y L n (x P ) y n (39) Bei der Interpolation nach LAGRANGE werden keine geschlossenen analytische Funktionen berechnet, sondern nur jeweils einzelne Werte p (x P ) zur Interpolationsstelle x P Dabei sind die Koeffizienten (L i (x) (i = 0 1 n)) der Stützwerte y i Polynome n-ten Grades von x P Diese werden aus den Stützstellen x i berechnet Die LAGRANGEschen Polynome n-ten Grades haben folgende Gestalt: L 0 (x) = (x P x 1 ) (x P x ) (x P x n ) (x 0 x 1 ) (x 0 x ) (x 0 x n ) L 1 (x) = (x P x 0 ) (x P x ) (x P x n ) (x 1 x 0 ) (x 1 x ) (x 1 x n ) L i (x) = (x P x 0 ) (x P x 1 ) (x P x ) (x P x i 1 ) (x P x i+1 ) (x P x n ) (x i x 0 ) (x i x 1 ) (x i x i 1 ) (x i x i+1 ) (x i x n ) L n (x) = (x P x 0 ) (x P x 1 ) (x P x ) (x P x n 1 ) (x n x 0 ) (x n x 1 ) (x n x n 1 ) Damit erhält das Interpolationspolynom von LAGRANGE die Form: (310) y = f(x P ) p (x P ) = L 0 (x P ) y 0 + L 1 (x P ) y L n (x P ) y n (311) = (x P x 1 ) (x P x ) (x P x n ) (x 0 x 1 ) (x 0 x ) (x 0 x n ) y 0 + (x P x 0 ) (x P x ) (x P x n ) (x 1 x 0 ) (x 1 x ) (x 1 x n ) y (x P x 0 ) (x P x 1 ) (x P x ) (x P x n 1 ) y n (x n x 0 ) (x n x 1 ) (x n x n 1 ) Setzt man für x P einen der Werte x 0 x 1 x n 1 x n ein, so wird immer ein Faktor des Zählers gleich Null Damit werden werden alle LAGRANGEschen Polynome außer dem i ten gleich Null Für das i te Polynom wird der Zähler gleich dem Nenner und erhält damit den Werte Eins Damit ist bewiesen: y i = f(x i ) p (x i ) = 1 y i Ein Nachteil des LAGRANGEschen Verfahrens besteht darin, dass bei einer Erhöhung der berücksichtigten Stützstellenzahl, welche mit der Erhöhung des Grades des Interpolationsalgorithmus identisch ist, die Berechnung der LAGRANGEschen Interpolationspolynome erneut durchgeführt werden muss Dies ist zb auch im folgenden Beispiel deutlich zu sehen Beachte: Die Gewichte (Faktoren) L i (x i ) der LANGRANGEschen Interpolationsformel müssen immer neu berechnet werden, wenn sich die Zahl der Stützstellen ändert Die Summe der Gewichte ist immer gleich Eins (zur Kontrolle der Ergebnisse wichtig) Li (x i ) = 1 69
 = (x P x 1 ) (x P x ) (x P x n ) (x 0 x 1 ) (x 0 x ) (x 0 x n ) L 1 (x) = (x P x 0 ) (x P x ) (x P x n ) (x 1 x 0 ) (x 1 x ) (x 1 x n ) L i (x) = (x P x 0 ) (x P x 1 ) (x P x ) (x P x i 1 ) (x")
10 KAPITEL 3 INTERPOLATIONSVERFAHREN Beispiel zur Anwendung der LAGRANGEschen Interpolationsfunktion: Für die Funktion y n = f (x n ) sind die Werte an den äquidistanten Stellen x n = x 0 + nh, mit n = 1; 0; 1; (siehe Tabelle) gegeben: n 1 1 x n x 0 h x 0 x 0 + h x 0 + 4h f (x n ) y 1 y 0 y 1 y Gesucht ist ein Näherungswert w = f (x) = f (x 0 + h) für x = 1 Nach den Regeln des Polynomansatzes kann in diesem Fall mit den vier Stützstellen maximal ein Interpolationspolynom dritten Grades entwickelt werden Es ist aber auch möglich, eine stückweise Interpolation durchzuführen Dies hat den Vorteil, dass man den Rechenaufwand reduzieren kann Die Genauigkeit wird dadurch aber verschlechtert Es gilt in diesem Fall, ein Optimum zwischen erforderlicher Genauigkeit und Rechenaufwand zu finden Bei der stückweisen Interpolation werden die Stützstellen benutzt, die dem Interpolationspunkt am nächsten liegen 1 Lineare Interpolation Die Interpolationsfunktion an der Stelle x = 1 wird mit Hilfe der LAGRANGEschen Interpolationsformel folgenderweise geschrieben (siehe Gleichung 39): w 1 = L 0 (x 1 )y 0 + L 1 (x 1 )y 1 Dabei werden die Stützstellen benutzt, zwischen denen der Wert x = 1 liegt, die Werte x = 0 und x = 1 Die Faktoren L 0 und L 1 sind (siehe Gleichung 310): Dann ist der gesuchte Wert: L 0 x 1 = x 1 x 1 = x 0 + h x 0 h = 1 x 0 x 1 x 0 x 0 h L 1 x 1 = x 1 x 0 = x 0 + h x 0 = 1 x 1 x 0 x 0 + h x 0 w 1 = 1 (y 0 + y 1 ) Das Ergebnis der linearen Interpolation ist damit gleich dem arithmetischen Mittel Quadratische Interpolation In diesem Fall ist(siehe Gleichung 39): w 1 = L 0 x 1 y 0 + L 1 x 1 y 1 + L Die entsprechenden Faktoren sind (siehe Gleichung 310): x 1 x 1 x 1 x L 0 x 1 = (x 0 x 1 ) (x 0 x ) L 1 x 1 = L x 1 = x 1 x 0 x 1 x (x 1 x 0 ) (x 1 x ) x 1 = 3 8 y = 3 4 x 1 x 0 x 1 x 1 = 1 (x x 0 ) (x x 1 ) 8 70

11 31 POLYNOMINTERPOLATION und der gesuchte Wert ist: w 1 = 3 8 y y y 3 Kubische Interpolation Auf dieselbe Weise folgt (siehe Gleichung 39): w 1 = L 1 x 1 y 1 + L 0 x 1 y 0 + L 1 x 1 y 1 + L Man erhält folgende LAGRANGEfaktoren (siehe Gleichung 310): x 1 x 0 x 1 x 1 x 1 x L 1 x 1 = (x 1 x 0 ) (x 1 x 1 ) (x 1 x ) = 1 16 L 0 x 1 = L 1 x 1 = L x 1 = Damit lautet der interpolierte Wert: x 1 x 1 x 1 x 1 x 1 x (x 0 x 1 ) (x 0 x 1 ) (x 0 x ) x 1 x 1 x 1 x 0 x 1 x (x 1 x 1 ) (x 1 x 0 ) (x 1 x ) x 1 = 9 16 = 9 16 x 1 x 1 x 1 x 0 x 1 x 1 = 1 (x x 1 ) (x x 0 ) (x x 1 ) 16 w 1 = 1 16 y y y y y 71
 (x 1 x 0 ) (x 1 x ) x 1 = 9 16 = 9 16 x 1 x 1 x 1 x 0 x 1 x 1 = 1 (x x 1 ) (x x 0 ) (x x 1 ) 16 w 1 = 1 16 y 1 + 9 16 y 0 + 9 16 y 1 1 16 y y")
12 KAPITEL 3 INTERPOLATIONSVERFAHREN 313 NEWTONsche Interpolationsformel 3131 Beliebige Stützstellen Der Nachteil des LAGRANGEschen Verfahrens, dass die LAGRANGEschen Polynome neu berechnet werden müssen, wird bei dem NEWTONschen Verfahren vermieden Bei dem NEWTONschen Verfahren wird bei Berücksichtigung weiterer Stützstellen nur ein Zusatzglied addiert Das Verfahren geht von folgenden Ansatz aus: p(x) = b 0 + b 1 (x x 0 ) + b (x x 0 )(x x 1 ) + b 3 (x x 0 )(x x 1 )(x x ) + b n (x x 0 )(x x 1 ) (x x n 1 ) (31) Wenn ein bestimmter Interpolationswert p(x P ) gesucht wird, wird im Polynomausdruck x durch x P ersetzt Die Koeffizienten werden wieder so bestimmt, dass das Polynom die Stützstellen (x n y n ) exakt widerspiegelt Setzt man in den NEWTONschen Ansatz für x P die Werte x 0 x 1 x n ein, so erhält man ein gestaffeltes Gleichungssystem mit n Gleichungen für n Unbekannte, da jeweils die entsprechenden Faktoren ((x P x i ) = 0) Null werden und damit die Polynomglieder wegfallen Dabei muss der Polynomwert p(x i ) den Stützwert y i annehmen y 0 = b 0 + b 1 (x 0 x 0 ) + (313) =0 y 1 = b 0 + b 1 (x 1 x 0 ) + b (x 1 x 0 )(x 1 x 1 ) + =0 y = b 0 + b 1 (x x 0 ) + b (x x 0 )(x x 1 ) y n = b 0 + b 1 (x n x 0 ) + b (x n x 0 )(x n x 1 ) + + b n (x n x 0 )(x n x 1 ) (x n x n 1 ) Das Gleichungssystem lässt sich schrittweise nach b 0 b 1 b b n auflösen Durch Einsetzen der ersten Gleichung in die zweite erhält man b 1 Dieses wiederum in die dritte eingesetzt liefert b In die (n + 1)-te Gleichung werden die zuvor bestimmten b 0 b 1 b b n 1 eingesetzt und liefern dann b n 7
 exakt widerspiegelt Setzt man in den NEWTONschen Ansatz für x P die Werte")
13 31 POLYNOMINTERPOLATION b 0 = y 0 b 1 = (y 1 y 0 ) (x 1 x 0 ) = [x 1x 0 ] b = (y y 0 ) (y 1 y 0 ) (x 1 x 0 ) (x x 0 ) (x x 0 )(x x 1 ) = (y y 1 ) + (y 1 y 0 ) [x 1 x 0 ] (x x 0 ) (x x 0 )(x x 1 ) (y y 1 ) = (x x 0 )(x x 1 ) + (y 1 y 0 ) (x x 0 )(x x 1 ) [x 1x 0 ] (x x 0 ) (x x 0 )(x x 1 ) = [x x 1 ] (x x 0 ) + [x 1x 0 ] (x 1 x 0 ) (x x 0 )(x x 1 ) [x 1x 0 ] (x x 0 ) (x x 0 )(x x 1 ) = [x x 1 ] (x x 0 ) + [x 1x 0 ] (x 1 x 0 ) [x 1 x 0 ] (x x 0 ) (x x 0 )(x x 1 ) = [x x 1 ] (x x 0 ) + [x 1x 0 ] (x x 1 ) (x x 0 )(x x 1 ) b = [x x 1 ] [x 1 x 0 ] = [x x 1 x 0 ] (x x 0 ) Allgemein kann man folgende gekürzte Schreibweise, die als dividierte Differenzen höherer Ordnung bezeichnet werden, einführen: [x k x i ] := (y k y i ) (x k x i ) [x l x k x i ] := [x lx k ] [x k x i ] (x l x i ) [x m x l x k x i ] := [x mx l x k ] [x l x k x i ] (x m x i ) (314) erster und (315) [x n x n 1 x 1 x 0 ] := [x nx n 1 x 1 ] [x n 1 x 1 x 0 ] (x n x 0 ) Damit ergeben sich die gesuchten Koeffizienten zu: b 0 = y 0 (316) b 1 = (y 1 y 0 ) (x 1 x 0 ) = [x 1x 0 ] b = [x x 1 ] [x 1 x 0 ] (x x 0 ) b 3 = [x 3x x 1 ] [x x 1 x 0 ] (x 3 x 0 ) = [x x 1 x 0 ] = [x 3 x x 1 x 0 ] b n = [x nx n 1 x 1 ] [x n 1 x 1 x 0 ] (x n x 0 ) = [x n x n 1 x 1 x 0 ] 73
![(x x 0 ) + [x 1x 0 ] (x 1 x 0 ) [x 1 x 0 ] (x x 0 ) (x x 0 )(x x 1 ) = [x x 1 ] (x x 0 ) + [x 1x 0 ] (x x 1 ) (x x 0 )(x x 1 ) b = [x x 1 ] [x 1 x 0 ] = [x x 1 x 0 ] (x x 0 ) Allgemein kann man](/docs-images/49/19220404/images/page_13.jpg "folgende gekürzte Schreibweise, die als dividierte Differenzen höherer Ordnung bezeichnet werden, einführen: [x k x i ] := (y k y i ) (x k x i ) [x l x k x i ] := [x lx k ] [x k x i ] (x l x i ) [x m")
14 KAPITEL 3 INTERPOLATIONSVERFAHREN Die Koeffizienten lassen sich besonders bequem nach dem folgenden Rechenschema bestimmen (in diesem Beispiel für 5 Stützstellen): x 0 y 0 = b 0 x 1 y 1 x y x 3 y 3 x 4 y 4 (y 1 y 0 ) (x 1 x 0 ) = [x 1x 0 ] = b 1 (y y 1 ) (x x 1 ) = [x x 1 ] (y 3 y ) (x 3 x ) = [x 3x ] (y 4 y 3 ) (x 4 x 3 ) = [x 4x 3 ] [x x 1 x 0 ] = b [x 3 x x 1 ] [x 4 x 3 x ] [x 3 x x 1 x 0 ] = b 3 [x 4 x 3 x x 1 ] [x 4 x 3 x x 1 x 0 ] = b 4 Entsprechend Gleichung 31 ergibt sich der zu interpolierende Wert y an der Stelle x zu: (317) y(x) p(x) = b 0 + b 1 (x x 0 ) (318) + b (x x 0 )(x x 1 ) + b 3 (x x 0 )(x x 1 )(x x ) + b 4 (x x 0 )(x x 1 )(x x )(x x 3 ) Diese Gleichung kann natürlich auch benutzt werden, um den Funktionsverlauf der Interpolationsfunktion w = p(x) zu berechnen und eventuell grafisch darzustellen 313 Äquidistante Stützstellenverteilung Sei die äquidistanten Stützstellenverteilung x 0 x 1 = x 0 + h x n = x 0 + nh (h ist die Schrittweite) gegeben, dann lautet nach NEWTON die Interpolationsfunktion: p (x) = y 0 + Δy 0 h (x x 0)+ Δ y 0 h (x x 0) (x x 1 )++ Δn y 0 n h n (x x 0) (x x n 1 ) (319) Die Elemente Δy 0 Δ y 0 Δ n y 0 werden als finite Differenzen bezeichnet Dabei stellen die Exponenten nicht die Potenzierung, sondern die schrittweise Differenzenbildung dar Vergleicht man diese Gleichung 319 mit der Gleichung 31 auf Seite 7 so erhält man: b 0 y 0 b 1 = y 1 y 0 Δy 0 x 1 x 0 h b = [x x 1 ] [x 1 x 0 ] (x x 0 ) Δ y 0 h (30) 74
![b 3 [x 4 x 3 x x 1 ] [x 4 x 3 x x 1 x 0 ] = b 4 Entsprechend Gleichung 31 ergibt sich der zu interpolierende Wert y an der Stelle x zu: (317) y(x) p(x) = b 0 + b 1 (x x 0 ) (318) + b (x x 0 )(x x 1 )](/docs-images/49/19220404/images/page_14.jpg "+ b 3 (x x 0 )(x x 1 )(x x ) + b 4 (x x 0 )(x x 1 )(x x )(x x 3 ) Diese Gleichung kann natürlich auch benutzt werden, um den Funktionsverlauf der Interpolationsfunktion w = p(x) zu berechnen und")
15 31 POLYNOMINTERPOLATION Diese Differenzen werden nach folgendem Schema berechnet: x 0 y 0 x 1 y 1 x y x n1 x n y n1 y n Δy 0 = y 1 y 0 Δy 1 = y y 1 Δy n = y n1 y n Δy n1 = y n y n1 Δ y 0 = Δy 1 Δy 0 Δ y 1 = Δy Δy 1 Δ y n = Δy n1 Δy n Δ n y 0 = Δ n1 y 1 Δ n1 y 0 Das Schema ist zb für n = 4: x 0 y 0 Δy 0 = y 1 y 0 x 1 y 1 x y x 3 y 3 x 4 y 4 Δy 1 = y y 1 Δy = y 3 y Δy 3 = y 4 y 3 Δ y 0 = Δy 1 Δy 0 Δ y 1 = Δy Δy 1 Δ y = Δy 3 Δy Δ 3 y 0 = Δ y 1 Δ y 0 Δ 3 y 1 = Δ y Δ y 1 Δ 4 y 0 = Δ 3 y 1 Δ 3 y 0 Durch rückwärtiges Einsetzen sieht man, dass jede finite Differenz eine Kombination der y-werte der ersten Spalte ist Es gilt z B : Δ 3 y 0 = y 3 3y + 3y 1 y 0 (31) 3133 Beispiele zur Anwendung des Newtonschen Verfahren 1 Für die Funktion y n = f (x n ) sind die Werte an den äquidistanten Stellen x n = x 0 + nh, n = 1; 0; 1; (siehe Tabelle) gegeben: n 1 1 x n x 0 h x 0 x 0 + h x 0 + 4h f (x n ) y 1 y 0 y 1 y Gesucht ist ein Näherungswert x = 1 für y 1 = f (x 0 + h) Lösen Sie dieses Beispiel mit dem NEWTONschen Verfahren und vergleichen Sie die Ergebnisse mit denen der LANGRANGEschen Interpolationsformel a) Lineare Interpolation: p x 1 In dem Beispiel beträgt Δx = h p x 1 = y 0 + Δy 0 Δx = y 0 + y 1 y 0 h = 1 (y 0 + y 1 ) x 1 x 0 (x 0 + h x 0 ) 75
 3133 Beispiele zur Anwendung des Newtonschen Verfahren 1 Für die Funktion y n = f (x n ) sind die Werte an den äquidistanten Stellen x")
16 KAPITEL 3 INTERPOLATIONSVERFAHREN b) Quadratische Interpolation: p x 1 = y 0 + Δy 0 Δx In dem Beispiel beträgt Δx = h p x 1 = 1 (y 0 + y 1 ) + y y 1 + y 0 (h) = 3 8 y y y x 1 x 0 + Δ y 0 Δx x 1 x 0 x 1 x 1 (x 0 + h x 0 ) (x 0 + h x 0 h) Es gilt: Δ y 0 = Δy 1 Δy 0 = y y 1 (y 1 y 0 ) = y y 1 + y 0 Bemerkung: Der Vorteil des NEWTONschen Verfahrens liegt darin, dass sich die Polynome L i (x) nicht ändern, wenn die Anzahl der Stützstellen verändert wird, dh man braucht jedes Mal nur das zusätzliche Glied der Interpolationsfunktion zu berechnen Gegeben sind folgende Messwerte: x y Bestimmen Sie den Wert y = f ( 5) Wählen Sie dazu ein Polynom geeigneten Grades Wie groß ist die Abweichung, wenn sich der Grad des Polynoms ändert? Zur Berechnung des gesuchten Wertes mittels Polynomen verschiedenen Grades ist das NEW- TONsche Verfahren geeignet Da die gegebenen Stützstellen äquidistant sind (h = 1), ist seine Anwendung möglich Zunächst werden die finiten Differenzen berechnet: x 0 = 0 y 0 = 1 x 1 = 1 y 1 = x = y = 4 x 3 = 3 y 3 = 8 x 4 = 4 y 4 = 15 x 5 = 5 y 5 = 6 Δy 0 = 1 Δy 1 = Δy = 4 Δy 3 = 7 Δy 4 = 11 Δ y 0 = 1 Δ y 1 = Δ y = 3 Δ y 3 = 4 Δ 3 y 0 = 1 Δ 3 y 1 = 1 Δ 3 y = 1 Δ 4 y 0 = 0 Δ 4 y 1 = 0 Δ 5 y 0 = 0 Daraus ist ersichtlich, dass das Interpolationspolynom maximal dritten Grades ist a) Lineare Interpolation Der gesuchte Wert bei x = 5 liegt zwischen x = und x 3 = 3 Deshalb wird die lineare Interpolation nur zwischen diesen beiden Werte durchgeführt p (x) = y + Δy h (x x ) = ( 5 ) 1 p ( 5) = 6 b) Quadratische Interpolation Da der gesuchte Wert bei x = 5 liegt, wird die quadratische Parabel zwischen den 76
 Wählen Sie dazu ein Polynom geeigneten Grades Wie groß ist die Abweichung, wenn sich der Grad des Polynoms ändert?")
17 31 POLYNOMINTERPOLATION Werten x 1 x, und x 3 aufgespannt p (x) = y + Δy h (x x ) + Δ y h (x x ) (x x 3 ) = ( 5 ) + ( 5 ) ( 5 3) = 4 + p ( 5) = 5 65 c) Kubische Interpolation Die kubische Interpolationsformel benötigt vier Stützstellen p (x) = y 1 + Δy 1 h (x x 1) + Δ y 1 h (x x 1) (x x ) + Δ3 y 1 3h 3 (x x 1)(x x )(x x 3 ) = + ( 5 1) + ( 5 1)( 5 ) ( 5 1)( 5 )( 5 3) 6 1 = p ( 5) = Für das zweite Tripel ergibt sich: p (x) = y + Δy h (x x ) + Δ y h (x x ) (x x 3 ) + Δ3 y 3h 3 (x x ) (x x 3 ) (x x 4 ) = ( 5 ) + ( 5 ) ( 5 3) ( 5 ) ( 5 3) ( 5 4) = p ( 5) = Die Abweichung zwischen dem linearen und dem quadratischen Ergebnis ist = 6 7% während die Abweichung zwischen dem quadratischen und dem kubischen Ergebnis nur = 1 1% beträgt Um die Ergebnisse zu beurteilen, können die gegebenen Punkte graphisch dargestellt werden (siehe Abbildung 33) 77
 ( 5 3) ( 5 4) 6 1 0 75 = 4 + + 0 065 p ( 5) = 5 6875 Die Abweichung zwischen dem linearen und dem quadratischen Ergebnis ist 5 65 6 5 65 = 6 7% während die Abweichung zwischen dem quadratischen und")
18 KAPITEL 3 INTERPOLATIONSVERFAHREN Abbildung 33: Darstellung der Messwerte und des interpolierten Wertes Die graphische Darstellung zeigt, dass der gesuchte Wert tatsächlich zwischen 5 und 6 liegen soll Es wird auch deutlich, dass die lineare Interpolation in diesem Fall kein gutes Ergebnis liefern kann Aus diesem Grund ist es sinnvoll, gegebene Punkte graphisch darzustellen und den gesuchten Wert einzuschätzen Im Fall eines realen Versuches ist es wichtig, genug Punkte zu haben, um die Form der Funktion mit guter Näherung zu bekommen Dies kann festgestellt werden, wenn zusätzliche Punkte dazugenommen werden und sich die Form der Funktion nicht wesentlich ändert 78

19 3 Interpolierende Polynomteilstücke (Spline) Zur Darstellung einer gegebenen Funktion in einem Intervall kann man an Stelle eines einzigen Polynoms mit hohem Grad Abschnitte mehrerer Polynome niedrigeren Grades miteinander verknüpfen Das klassische Beispiel sind Geradenstücke in Teilintervallen (siehe Abbildung 34) Dabei wird angenommen, dass die Funktion zwischen zwei Stützstellen fast linear ist Dieses gilt vor allem, wenn die Stützstellen eng genug bei einander liegen Derartige Approximationen sind zwar stetig, die er- Abbildung 34: Darstellung von linearen Spline-Kurven ste Ableitung ist aber unstetig, dh es treten Ecken beim Übergang vom einem Intervall zum anderen auf Im Folgenden wird ein Weg beschrieben, die Methode der Spline-Interpolation, bei dem kubische Parabelbögen so zusammengesetzt werden, dass die Ecken gerundet sind, die erste und zweite Ableitung der Approximation stetig ist Polynome höheren Grades werden in der Regel nicht verwendet, da sie stark oszillieren Ein gegebenes Intervall I = (a b) wird durch die x-werte x 0 = a x 1 x x n = b in n Teilintervalle aufgeteilt Die kubischen Parabelbögen werden so in jedes dieser Teilintervalle eingepasst, indem vorgegebene y-werte y i an den Stellen x i angenommen werden An den Übergangsstellen zwischen den Teilintervallen müssen die links- und rechtsseitige erste und zweite Ableitung übereinstimmen (siehe Abbildung 35) Die Stützstellen (x i y i ) werden die Knoten des Splines (das Wort Spline bezeichnete ursprünglich ein flexibles Kurvenlineal) genannt Abbildung 35: Darstellung von Spline-Kurven für ein kubisches System Peter-Wolfgang Gräber Systemanalyse in der Wasserwirtschaft

20 KAPITEL 3 INTERPOLATIONSVERFAHREN Ein kubisches Polynom dritten Grades hat vier Koeffizienten Allgemein lautet der Ansatz: p i (x) = c 0i + c 1i x + c i x + c 3i x 3 (3) Die Spline-Funktion ist demnach folgendermaßen definiert: 1 S(x) ist im Bereich [a b] zweimal stetig differenzierbar S (x) ist in jedem Intervall [x i x i+1 ] durch ein kubisches Polynom p i (x) gegeben S(x) p i (x) p i (x) := a i + b i (x x i ) + c i (x x i ) + d i (x x i ) 3 (33) 3 S (x) erfüllt die Interpolationsbedingungen S (x i ) = y i für alle i von [1 n] im Gebiet [a b] 4 Je nach Gestaltung der Anschlussbedingungen unterscheidet man verschiedene Arten von Spline-Funtionen So erhält man folgende spezielle kubische Spline-Funktionen Anschlussbedingung Bezeichnung Bemerkung S (x 0 ) = S (x 0 ) = 0 S (x S (x n ) = S natürlich 0 ) und S (x n ) ist die Tangente (x n ) = 0 an den Graphen von S (x) S (x 0 ) = αs (x n ) = β verallgemeinert S (x 0 ) = αs (x n ) = β vorgegeben erste Ableitung am Rand S (x 0 ) = αs (x n ) = β vorgegeben dritte Ableitung am Rand S (x 0 ) = S (x n ) S (x 0 ) = S (x n ) periodisch S (x 0 ) = S (x n ) p 0 (x) = p l (x) p n (x) = p n 1 (x) not-a-knot S (x l ) und S (x n ) sind stetig Bei n Segmenten ergeben sich 4n Koeffizienten Entscheidend ist, dass 4n Bedingungen für die 4n Koeffizienten erwartet werden Es gibt 4 Bedingungen an jedem Knoten (x i y i ) für i = 1 n 1 (y-wert und Übereinstimmung der Ableitungen) Dieses liefert 4n 4 Bedingungen An den Endpunkten muss der y-wert angenommen werden, und damit sind 4n Bedingungen gefunden, dh die Spline-Kurve ist nicht vollständig definiert; zwei Freiheitsgrade bleiben p i (x i ) = y i i = 0; 1; n Interpolationsbedingungen p i (x i ) = p i 1 (x i ) p i (x i) = p i 1 (x i) p i (x i) = p i 1 (x i = 1; n 1 Anschlussbedingungen (34) der Polynome p i an p i 1 i) Man kann die zweite Ableitung an den Endpunkten Null setzen und erhält so eine natürliche Splinekurve p n (x n ) = a n S (x 0 ) und S (x n ) ist die Tangente p (35) n(x n ) = c n an den Graphen von S (x) Alternativ kann die erste Ableitung an den Endpunkten vorgegeben werden, um eine Funktion zu approximieren So ergibt sich ein Gleichungssystem mit 4n Gleichungen für 4n + Unbekannte Die fehlenden beiden Gleichungen werden durch Vorgabe der Randbedingen abgedeckt p 0 (x 0) = 0 p n(x n ) = 0 Randbedingungen (36) 80
![:= a i + b i (x x i ) + c i (x x i ) + d i (x x i ) 3 (33) 3 S (x) erfüllt die Interpolationsbedingungen S (x i ) = y i für alle i von [1 n] im Gebiet [a b] 4 Je nach Gestaltung der](/docs-images/49/19220404/images/page_20.jpg "Anschlussbedingungen unterscheidet man verschiedene Arten von Spline-Funtionen So erhält man folgende spezielle kubische Spline-Funktionen Anschlussbedingung Bezeichnung Bemerkung S (x 0 ) = S (x 0 )")
21 3 INTERPOLIERENDE POLYNOMTEILSTÜCKE (SPLINE) Dieses Gleichungssystem kann nach den bekannten Methoden gelöst werden In der Regel ist die Lösung dieses Gleichungssystems aufwendig, so dass nicht nur Gesamtschritt- sondern auch iterative Verfahren (siehe Abschnitt 13 Lösungsmethoden von Gleichungssystemen, Seite ) angewandt werden müssen Wie unten gezeigt wird, kann aber bei Benutzung eines bestimmten Schemas ein tridiagonales Gleichungssystem erzeugt werden, welches mit wenig Aufwand gelöst werden kann Rechenschema Sind n + 1 Stützstellen x i mit i = 0; 1; n mit den Schrittweiten h i = x i+1 x i und den n + 1 Stützwerten y i mit i = 0; 1; n gegeben (zb als Messwertreihe), so kann zur Interpolation mittels kubischer Spline-Funktionen n 1 S(x) p i (x) i=0 p i (x) = a i + b i (x x i ) + c i (x x i ) + d i (x x i ) 3 (37) mit n Teilfunktionen für die Geltungsbereichen x i x x i+1 folgendes Berechnungsschema (siehe Gleichungen 34 bis 36) verwendet werden Schritt Berechnung Gültigkeitsbereich 1 a i = y i i = 0 1 n c 0 = c n = 0 3 h i 1 c i 1 +(h i 1 + h i )c i + h i c i+1 = 3 h i (a i1 a i ) 3 h i1 (a i a i 1 ) i = 1 n Bemerkung Aus Gleichung 34 Interpolationsbedingung p i (x i ) = y i, für alle Stützstellen Für natürliche Splines gilt S (x 0 ) = S (x n ) = 0 p (x) = c i + 6d i (x x i ) p (x 0 ) = c 0 = 0 p (x n ) = c n = 0 Aus Gleichung 34 Anschlussbedingungen p i+1 (x i+1 ) = p i (x i+1 ) 4 b i = 1 h i (a i1 a i ) h i 3 (c i1 c i ) i = 0 1 n p i+1 (x i+1) = p i (x i+1) 5 d i = 1 3h i (c i+1 c i ) i = 0 1 n p i+1 (x i+1) = p i (x i+1) Die Gleichung im 3 Schritt der Tabelle stellt ein lineares Gleichungssystem von n 1 Gleichungen für die Unbekannten c 1 ; c ; c n 1 dar In der Matrixschreibweise besitzt es die Form: A C = R (38) 81
22 KAPITEL 3 INTERPOLATIONSVERFAHREN (h 0 + h 1 ) h 1 h 1 (h 1 + h ) h h (h + h 3 ) h 3 A = h n 3 (h n 3 + h n ) h n h n (h n + h n 1 ) (39) 3 (a a 1 ) 3 (a 1 a 0 ) h 1 h 0 3 (a 3 a ) 3 (a a 1 ) h h 1 3 (a R = 4 a 3 ) 3 (a 3 a ) h 3 h 3 (a n 1 a n ) 3 (a n a n 3 ) h n h n 3 3 (a n a n 1 ) 3 (a n 1 a n ) h n 1 h n C = c 1 c c 3 c n c n 1 (330) (331) Die Matrix A ist tridiagonal, symmetrisch, diagonaldominant, positiv definit und besitzt nur positive Elemente Damit ist diese Matrix stets invertierbar und stets eindeutig lösbar Als Lösungsmethode kann vorteilhafter Weise der GAUSSsche Algorithmus für tridiagonale Matrizen (siehe Abschnitt 131 Lösungen von Gleichungssystemen, GAUSSscher Algorithmus, Seite 4) benutzt werden 8
23 3 INTERPOLIERENDE POLYNOMTEILSTÜCKE (SPLINE) Beispiel zur Anwendung der Splinefunktion: Folgende Messwerte sind als Stützstellen und -werte gegeben i x i y i Für diese 5 Wertepaare soll eine natürliche kubische Spline-Funktion gefunden werden Nach der Definition der Spline-Funktionen werden durch die 5 Wertepaare 4 Teilfunktionen i = 1; ; 3; 4 p i (x) = a i + b i (x x i ) + c i (x x i ) + d i (x x i ) 3 mit einem jeweiligen Geltungsbereich von x i x x i+1 gesucht Entsprechend des Rechenschemas werden folgende fünf Schritte ausgeführt Schritt Berechnung Ergebnis 1 a i = y i c 0 = c 4 = 0 (h 0 + h 1 ) h 1 0 c 1 h 1 (h 1 + h ) h c 0 h (h + h 3 ) c 3 3 (a a 1 ) 3 (a 1 a 0 ) h 1 h 0 3 = (a 3 a ) 3 (a a 1 ) h h 1 3 (a 4 a 3 ) 3 (a 3 a ) 3 h 3 h ( ) ( ) ( ) 3 3 ( ) ( ) = ( ) ( ) ( ) ( ) b i = 1 h i (a i+1 a i ) h i 3 (c i+1 c i ) 5 d i = 1 3h i (c i+1 c i ) c 1 c c 3 a 0 = 0 5 a 1 = 0 8 a = 1 0 a 3 = 0 8 a 4 = 0 5 c 0 = 0 c 4 = 0 c 1 = c = 1 09 c 3 = b 0 = b 1 = b = b 3 = d 0 = d 1 = d = d 3 =
24 KAPITEL 3 INTERPOLATIONSVERFAHREN Damit ergeben sich nach Gleichung 33 folgende Teil-Spline-Funktionen: p i (x) := a i + b i (x x i ) + c i (x x i ) + d i (x x i ) 3 Teil-Spline-Funktion p 0 (x) = (x + 1) (x + 1) 3 p 1 (x) = (x + 0 5) 0 043(x + 0 5) (x + 0 5) 3 p (x) = x 1 09x x 3 p 3 (x) = (x 0 5) 0 043(x 0 5) (x 0 5) 3 Die Teil-Spline-Funktionen gelten jeweils auf dem Intervall x i x x i+1 Die grafische Darstellung des Splines zeigt Abbildung 36: Abbildung 36: Interpolierte Spline-Funktion Man erkennt, dass der Spline die ursprüngliche analytische Funktion y = 1 x + 1 sehr gut nachbildet Die maximale Abweichung zur analytischen Lösung beträgt ; dies entspricht 1 68% 84
25 33 Kriging-Verfahren Mit Kriging wird eine Familie spezieller Interpolationsverfahren bezeichnet, die auf folgendes Problem zielt: Die Probenahme an einem Ort liefert Informationen für bestimmte raumbezogene Punkte Es ist aber dadurch nicht bekannt, welche Werte für die zumessenden Variablen zwischen diesen Punkten vorliegen Kriging ist ein Verfahren, das ermöglicht, die Werte an Zwischenpunkten oder den Durchschnitt über einen gesamten Block zu berechnen Die verschiedenen Spezialverfahren basieren dabei alle auf der Bildung gewichteter Mittelwerte der raumbezogenen Variablen Blockschätzungen sind vorwiegend im Bergbau notwendig, während Punktschätzungen für Kartendarstellungen eingesetzt werden, was im Folgenden erläutert wird Die einzelnen Kriging-Verfahren unterscheiden sich entweder in der Art der zu schätzenden Zielgrößen oder in ihrer methodischen Erweiterung zur Einbeziehung zusätzlicher Informationen Zusätzliche Informationen über das räumliche Verhalten einer ortsabhängigen Variablen bestehen in der Kenntnis andere Messgrößen, die in Beziehung zu der betrachtenden Variablen stehen Bekannt in der hydrogeologischen Praxis sind zb korrelierende Wasserinhaltsstoffe oder zeitliche Wiederholungsmessungen von Grundwasserdruckhöhen Gemeinsam sind allen Kriging-Verfahren die folgenden Vorteile gegenüber anderen Interpolationsverfahren: Kriging liefert den besten Schätzwert Kriging bezieht die Kenntnis der räumlichen Struktur der Variablen, das Variogramm, in die Schätzung mit ein Die individuelle räumliche Anordnung des Messstellennetzes im Bezug auf das Interpolationsgitter wird berücksichtigt Die Zuverlässigkeit der Ergebnisse wird für jeden Schätzpunkt in Form des Kriging-Fehlers angegeben Beachte: Auch bei den Kriging-Verfahren muss beachtet werden, dass durch die mathematischen Verfahren keine Informationensgewinn erreicht werden kann Es wird nur der Informationsgehalt der Messwerte (Stützwerte) verarbeitet Dabei können durchaus Interpolationsergebnisse entstehen, die physikalischen Gesetzen widersprechen (z B Grundwasserisohypsen durch Vorfluter) Will man physikalisch korrekte Interpolationen erhalten, so ist eine feinquantisierte Simulation mittels physikalischer Modelle (z B Grundwasserströmungsmodelle) notwendig und sinnvoll Deshalb bieten derartige Simulationsprogramme interne Grafikroutinen zur Isolinienerzeugung an Peter-Wolfgang Gräber Systemanalyse in der Wasserwirtschaft
26 KAPITEL 3 INTERPOLATIONSVERFAHREN Abbildung 37: Darstellung des Kriging-Problems Um die Kriging-Verfahren zu verstehen, müssen folgende Begriffe aus der Geostatistik bekannt sein: 1 n Mittelwert m = Z a n a=1 z p (z) dz = m, Erwartungswert E [Z] = wobei p (z) die Dichtefunktion ist Varianz var (Z) = σ = E (Z E [Z]) = E (Z m) Kovarianz zweier Zufallsvariablen cov (Z i Z j ) = E [(Z i m i ) (Z j m j )] = σ ij Z i Z j Korrelationskoeffizient Variogramm ρ ij = h γ = σ ij 1 E σ i σ j Z x + h Z ( x ) Z ist eine ortsabhängige Zufallsvariable mit n bekannten Messwerten Z a Die Dichtefunktion p (z) ist ein Maß dafür, mit welcher Wahrscheinlichkeit Z den Wert z i annimmt Das Variogramm ist ein Maß für die Variabilität einer Zufallsfunktion, durch Berechnung der Ungleichheit zweier Werte, die Punkten mit Abstand den Vektor h entsprechen Dann kann das Kriging-Problem entsprechend Abbildung 37 dargestellt werden: Wir haben eine Anzahl von Messwerten Z ( x a ), wobei Z eine Zufallsvariable und x a die Messstellen eines Bereiches D sind Wir nehmen dann an, dass Z ( x a ) eine Untermenge der Zufallsfunktion Z ( x ) ist, die folgende Eigenschaften hat: 86
27 33 KRIGING-VERFAHREN Sie ist eine stationäre Funktion Ordnung, dh 1 der Erwartungwert ist konstant über dem Bereich D E Z x + h = E [Z ( x )] die Kovarianz zwischen zwei Punkten ist nur vom Vektor h abhängig, der diese Punkte verbindet: cov Z x + h Z ( h x ) = C Auf Grund dieser Annahmen wollen wir ein gewichtetes Mittel berechnen, um einen Schätzwert für die Stelle x 0 zu bekommen Der Kriging-Schätzer Z ( x 0 ) stellt eine Linearkombination gewichteter Probenwerte Z i und n benachbarter Punkte dar: Z ( n x 0 ) = λ i Z ( x i ) (33) i=1 Die Gewichte λ i sind so zu bestimmen, dass der Schätzwert Z ( x 0 ) des unbekannten wahren Wertes die folgenden Bedingungen erfüllt: 1 Z ( x 0 ) sei erwartungstreu, dh E [Z ( x 0 ) Z ( x 0 )] = 0 Der mittlere quadratische Fehler E [Z ( x 0 ) Z ( x 0 )] sei ein Minimum Unter der Annahme der Stationarität ist der Erwartungswert E [Z ( x i )] = m und Z ( x 0 ) = m Die Bedingung 1 (Erwartungstreue) liefert somit: n E λ i Z ( x i ) Z ( n n x 0 ) = λ i m m = m λ i 1 = 0 (333) i=1 i=1 Hieraus folgt, dass die Summe der Gewichte 1 sein muss Mit Hilfe des Variogramms kann der Erwartungswert des quadratischen Fehlers ausgedrückt werden: E [Z ( x 0 ) Z ( x 0 )] = var (Z ( x 0 ) Z ( x 0 )) (334) n = λ i γ ( x i n n x 0 ) λ i λ j ( x i x j ) γ ( x 0 x 0 ) i=1 i=1 j=1 n Um die Fehlervarianz unter der Nebenbedingung 1 λ i = 1 zu minimieren, wird ein LAGRANi=1 GE-Multiplikator µ eingeführt Dann wird folgende Funktion minimiert: n ϕ = var (Z ( x 0 ) Z ( x 0 )) µ λ i 1 Das Minimum erhält man durch Null-Setzen der partiellen Ableitungen φ (i = 1 n) und φ λ i µ Dies führt zu dem linearen Kriging-Gleichungssystem (KGS) mit n + 1 Gleichungen: n λ j γ ( x i x j ) + µ = γ ( x i x 0 ) für i = 1 n j=1 n λ j = 1 j=1 i=1 i=1 87
28 KAPITEL 3 INTERPOLATIONSVERFAHREN In Matrixform wird das KGS wie folgt geschrieben: γ ( x 1 x 1 ) γ ( x 1 x ) γ ( x 1 x n ) 1 γ ( x x 1 ) γ ( x x ) γ ( x x n ) 1 γ ( xn x 1 ) γ ( x n x ) γ ( x n x n ) λ 1 λ λ n µ = γ ( x 1 x 0 ) γ ( x x 0 ) γ ( x n x 0 ) 1 Dabei ist im Fall von Punktschätzungen γ ( x i x i ) = γ (0) = 0, dh die Diagonale ist mit Null besetzt h h h Da im stationären Fall die Beziehung γ = C (0) C gilt, kann γ im KGS durch die h Kovarianz C ersetzt werden Dadurch erhält die Diagonale der Matrix die größten Elemente In numerischer Hinsicht ist sie vorzuziehen und daher in den meisten Programmen verwirklicht Die Kriging-Schätzvarianz σk für Punktschätzungen ergibt sich aus obigen Gleichungen: σ K = var (Z ( x 0 ) Z ( x 0 )) = µ + n λ i γ ( x i x 0 ) (335) In einem Sonderfall, bei dem keine räumliche Abhängigkeit der Daten existiert, erhält man für die Gewichte λ i = 1 Der Kriging-Schätzer ist jetzt das einfache arithmetische Mittel der benachbarten n Proben Folgende Eigenschaften zeichnen den Kriging-Schätzer aus: Das KGS ist nur lösbar, wenn die Determinante der Matrix (γ ij ) = 0 ist Praktisch bedeutet dies, dass eine Probe nicht doppelt auftreten darf (dh mit identischen Koordinaten) Kriging liefert einen exakten Interpolator h h Das KGS hängt nur von γ bzw C ab, nicht jedoch von den Werten der Variablen Z in den Probenpunkten x i Bei identischer Datenkonfiguration braucht das KGS nur ein Mal gelöst zu werden Mit Hilfe des Schätzfehlers σ K können Vertauungsgrenzen der Schätzung angegeben werden In der Praxis ist eine Reihe von Kriging-Verfahren entwickelt und angewandt worden, die komplexere Situationen betrachten, zb instationäre Variablen, Raum-Zeit-Abhängigkeit usw i=1 88
29 34 Aufgaben Aufgaben zu 3: Interpolieren Sie die Aufgaben 1 und mittels der Verfahren: a) analytische Potenzfunktion b) LAGRANGEsche Interpolationsformel c) NEWTONsche Interpolationsformel d) Spline-Funktion 1 Für die Funktion der Normalverteilung y(x) = ex π, die auszugsweise tabelliert ist: x y(x) = ex π wird der Wert y(x) für x = 1 5 gesucht Interpolieren Sie die Funktion y= x für die Werte x = 1 03 und x = 1 6 an Hand der Tabelle x y = x Durch die drei Stützpunkte (1 ), ( 3), (3 1), ist eine ganze rationale Funktion möglichst niedrigen Grades zu legen Wie ändert sich diese Interpolationsfunktion, wenn man auch noch den Stützpunkt (4 4) dazunimmt? Peter-Wolfgang Gräber Systemanalyse in der Wasserwirtschaft
30 KAPITEL 3 INTERPOLATIONSVERFAHREN 90
5 Interpolation und Approximation
 5 Interpolation und Approximation Problemstellung: Es soll eine Funktion f(x) approximiert werden, von der die Funktionswerte nur an diskreten Stellen bekannt sind. 5. Das Interpolationspolynom y y = P(x)
5 Interpolation und Approximation Problemstellung: Es soll eine Funktion f(x) approximiert werden, von der die Funktionswerte nur an diskreten Stellen bekannt sind. 5. Das Interpolationspolynom y y = P(x)
Approximation durch Polynome
 durch n Anwendungen: zur Vereinfachung einer gegebenen Funktion durch einen Polynomausdruck. Dann sind übliche Rechenoperation +,,, / möglich. zur Interpolation von Daten einer Tabelle n Beispiel Trotz
durch n Anwendungen: zur Vereinfachung einer gegebenen Funktion durch einen Polynomausdruck. Dann sind übliche Rechenoperation +,,, / möglich. zur Interpolation von Daten einer Tabelle n Beispiel Trotz
H.J. Oberle Analysis II SoSe Interpolation
 HJ Oberle Analysis II SoSe 2012 7 Interpolation 71 Allgemeine Problemstellung Interpolation ist die Kunst, zwischen den Zeilen einer Tabelle zu lesen (Rutishauser) Von f : R R seien Funktionswerte (x j,
HJ Oberle Analysis II SoSe 2012 7 Interpolation 71 Allgemeine Problemstellung Interpolation ist die Kunst, zwischen den Zeilen einer Tabelle zu lesen (Rutishauser) Von f : R R seien Funktionswerte (x j,
Interpolation und Approximation von Funktionen
 Kapitel 6 Interpolation und Approximation von Funktionen Bei ökonomischen Anwendungen tritt oft das Problem auf, dass eine analytisch nicht verwendbare (oder auch unbekannte) Funktion f durch eine numerisch
Kapitel 6 Interpolation und Approximation von Funktionen Bei ökonomischen Anwendungen tritt oft das Problem auf, dass eine analytisch nicht verwendbare (oder auch unbekannte) Funktion f durch eine numerisch
6. Polynom-Interpolation
 6. Polynom-Interpolation 1 6.1. Klassische Polynom-Interpolation 2 6.2. Lösung mit Hilfe Lagrange scher Basisfunktionen 3 6.3. Lösung mit Hilfe Newton scher Basisfunktionen 4 6.4. Fehlerabschätzung für
6. Polynom-Interpolation 1 6.1. Klassische Polynom-Interpolation 2 6.2. Lösung mit Hilfe Lagrange scher Basisfunktionen 3 6.3. Lösung mit Hilfe Newton scher Basisfunktionen 4 6.4. Fehlerabschätzung für
Klassische Polynom Interpolation.
 Klassische Polynom Interpolation. Bestimme ein Polynom (höchstens) n ten Grades p n (x) = a 0 + a 1 x + a 2 x 2 +... + a n x n, das die gegebenen Daten interpoliert, d.h. p n (x i ) = f i, 0 i n. Erster
Klassische Polynom Interpolation. Bestimme ein Polynom (höchstens) n ten Grades p n (x) = a 0 + a 1 x + a 2 x 2 +... + a n x n, das die gegebenen Daten interpoliert, d.h. p n (x i ) = f i, 0 i n. Erster
Polynominterpolation
 Polynominterpolation In der numerischen Mathematik versteht man unter Polynominterpolation die Suche nach einem Polynom, welches exakt durch vorgegebene Punkte (z. B. aus einer Messreihe) verläuft. Dieses
Polynominterpolation In der numerischen Mathematik versteht man unter Polynominterpolation die Suche nach einem Polynom, welches exakt durch vorgegebene Punkte (z. B. aus einer Messreihe) verläuft. Dieses
Übungen zu Splines Lösungen zu Übung 20
 Übungen zu Splines Lösungen zu Übung 20 20.1 Gegeben seien in der (x, y)-ebene die 1 Punkte: x i 6 5 4 2 1 0 1 2 4 5 6 y i 1 1 1 1 1 + 5 1 + 8 4 1 + 8 1 + 5 1 1 1 1 (a) Skizzieren Sie diese Punkte. (b)
Übungen zu Splines Lösungen zu Übung 20 20.1 Gegeben seien in der (x, y)-ebene die 1 Punkte: x i 6 5 4 2 1 0 1 2 4 5 6 y i 1 1 1 1 1 + 5 1 + 8 4 1 + 8 1 + 5 1 1 1 1 (a) Skizzieren Sie diese Punkte. (b)
HTL Kapfenberg SPLINE Interpolation Seite 1 von 7.
 HTL Kapfenberg SPLINE Interpolation Seite von 7 Roland Pichler roland.pichler@htl-kapfenberg.ac.at SPLINE Interpolation Mathematische / Fachliche Inhalte in Stichworten: Polynome, Gleichungssysteme, Differenzialrechnung
HTL Kapfenberg SPLINE Interpolation Seite von 7 Roland Pichler roland.pichler@htl-kapfenberg.ac.at SPLINE Interpolation Mathematische / Fachliche Inhalte in Stichworten: Polynome, Gleichungssysteme, Differenzialrechnung
1 2 x x x x x x2 + 83
 Polynominterpolation Aufgabe 1 Gegeben sei die Wertetabelle i 0 1 2 3 x i 0 1 2 4 f i 3 1 2 7 a) Bestimmen Sie das Interpolationspolynom von Lagrange durch die obigen Wertepaare. b) Interpolieren Sie die
Polynominterpolation Aufgabe 1 Gegeben sei die Wertetabelle i 0 1 2 3 x i 0 1 2 4 f i 3 1 2 7 a) Bestimmen Sie das Interpolationspolynom von Lagrange durch die obigen Wertepaare. b) Interpolieren Sie die
Interpolation, numerische Integration
 Interpolation, numerische Integration 8. Vorlesung 170 004 Numerische Methoden I Clemens Brand und Erika Hausenblas Montanuniversität Leoben 8. Mai 2014 Gliederung 1 Interpolation polynomial Spline 2 Numerische
Interpolation, numerische Integration 8. Vorlesung 170 004 Numerische Methoden I Clemens Brand und Erika Hausenblas Montanuniversität Leoben 8. Mai 2014 Gliederung 1 Interpolation polynomial Spline 2 Numerische
Optimieren unter Nebenbedingungen
 Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
KLAUSUR zur Numerik I mit Lösungen. Aufgabe 1: (10 Punkte) [ wahr falsch ] 1. Die maximale Ordnung einer s-stufigen Quadraturformel ist s 2.
![KLAUSUR zur Numerik I mit Lösungen. Aufgabe 1: (10 Punkte) [ wahr falsch ] 1. Die maximale Ordnung einer s-stufigen Quadraturformel ist s 2.](/thumbs/71/65292107.jpg "KLAUSUR zur Numerik I mit Lösungen. Aufgabe 1: (10 Punkte) [ wahr falsch ] 1. Die maximale Ordnung einer s-stufigen Quadraturformel ist s 2.") MATHEMATISCHES INSTITUT PROF. DR. ACHIM SCHÄDLE 9.8.7 KLAUSUR zur Numerik I mit Lösungen Aufgabe : ( Punkte) [ wahr falsch ]. Die maximale Ordnung einer s-stufigen Quadraturformel ist s. [ ]. Der Clenshaw
MATHEMATISCHES INSTITUT PROF. DR. ACHIM SCHÄDLE 9.8.7 KLAUSUR zur Numerik I mit Lösungen Aufgabe : ( Punkte) [ wahr falsch ]. Die maximale Ordnung einer s-stufigen Quadraturformel ist s. [ ]. Der Clenshaw
5 Numerische Mathematik
 6 5 Numerische Mathematik Die Numerische Mathematik setzt sich aus mehreren Einzelmodulen zusammen Für alle Studierenden ist das Modul Numerische Mathematik I: Grundlagen verpflichtend In diesem Modul
6 5 Numerische Mathematik Die Numerische Mathematik setzt sich aus mehreren Einzelmodulen zusammen Für alle Studierenden ist das Modul Numerische Mathematik I: Grundlagen verpflichtend In diesem Modul
1. Anhang: Spline-Funktionen
 C:\D\DOKU\NUM KURS\SPLINE.TEX C:\UG\.AI 20. Juli 1998 Vorbemerkung: Wenn der Satz stimmt, daß jede Formel eines Textes die Leserzahl halbiert, dann brauche ich bei grob geschätzt 40 Formeln etwa 2 40 =
C:\D\DOKU\NUM KURS\SPLINE.TEX C:\UG\.AI 20. Juli 1998 Vorbemerkung: Wenn der Satz stimmt, daß jede Formel eines Textes die Leserzahl halbiert, dann brauche ich bei grob geschätzt 40 Formeln etwa 2 40 =
Anwendungen der Differentialrechnung
 KAPITEL 3 Anwendungen der Differentialrechnung 3.1 Lokale Maxima und Minima Definition 16: Sei f : D R eine Funktion von n Veränderlichen. Ein Punkt x heißt lokale oder relative Maximalstelle bzw. Minimalstelle
KAPITEL 3 Anwendungen der Differentialrechnung 3.1 Lokale Maxima und Minima Definition 16: Sei f : D R eine Funktion von n Veränderlichen. Ein Punkt x heißt lokale oder relative Maximalstelle bzw. Minimalstelle
Polynominterpolation mit Matlab.
 Polynominterpolation mit Matlab. Die Matlab-Funktion polyfit a = polyfit(x,f,n-1); berechnet die Koeffizienten a = (a(1),a(2),...,a(n)); des Interpolationspolynoms p(x) = a(1)*x^(n-1) + a(2)*x^(n-2) +...
Polynominterpolation mit Matlab. Die Matlab-Funktion polyfit a = polyfit(x,f,n-1); berechnet die Koeffizienten a = (a(1),a(2),...,a(n)); des Interpolationspolynoms p(x) = a(1)*x^(n-1) + a(2)*x^(n-2) +...
Interpolation. Heinrich Voss. TUHH Heinrich Voss Kapitel / 49.
 Heinrich Voss voss@tu-harburg.de Hamburg University of Technology Institute for Numerical Simulation TUHH Heinrich Voss Kapitel 2 2010 1 / 49 Interpolationsproblem Gegeben seien eine Funktion Φ (x; a 1,...,
Heinrich Voss voss@tu-harburg.de Hamburg University of Technology Institute for Numerical Simulation TUHH Heinrich Voss Kapitel 2 2010 1 / 49 Interpolationsproblem Gegeben seien eine Funktion Φ (x; a 1,...,
In der Praxis werden wir häufig mit relativ komplexen Funktionen konfrontiert. y
 Approximationen In der Praxis werden wir häufig mit relativ komplexen Funktionen konfrontiert. y y = f (x) x Um das Arbeiten mit einer komplizierten Funktion zu vermeiden, können wir versuchen, diese Funktion
Approximationen In der Praxis werden wir häufig mit relativ komplexen Funktionen konfrontiert. y y = f (x) x Um das Arbeiten mit einer komplizierten Funktion zu vermeiden, können wir versuchen, diese Funktion
ANGEWANDTE MATHEMATIK POLYNOMFUNKTIONEN. Autor: Wolfgang Kugler
 Autor: Wolfgang Kugler Inhaltsverzeichnis Definition Nullstellen und Linearfaktorzerlegung 5. Einfache reelle Nullstellen 5. Reelle Nullstellen mit höherer Vielfachheit 7.3 Komplee Nullstellen. Zusammenfassung
Autor: Wolfgang Kugler Inhaltsverzeichnis Definition Nullstellen und Linearfaktorzerlegung 5. Einfache reelle Nullstellen 5. Reelle Nullstellen mit höherer Vielfachheit 7.3 Komplee Nullstellen. Zusammenfassung
6 Polynominterpolation
 Vorlesungsskript HM-Numerik (SS 2014): Kapitel 6 Version: 1 Juli 2014 6 Polynominterpolation Gegeben: Wertepaare { (x i,f i ) R 2 i = 0,,n } Gesucht: Einfache Funktion g : R R mit g(x i ) = f i i {0,1,,n}
Vorlesungsskript HM-Numerik (SS 2014): Kapitel 6 Version: 1 Juli 2014 6 Polynominterpolation Gegeben: Wertepaare { (x i,f i ) R 2 i = 0,,n } Gesucht: Einfache Funktion g : R R mit g(x i ) = f i i {0,1,,n}
Numerik für Ingenieure I Wintersemester 2008
 1 / 32 Numerik für Ingenieure I Wintersemester 2008 J. Michael Fried Lehrstuhl Angewandte Mathematik III 23.1.2009 2 / 32 Wiederholung Stückweise Polynominterpolation Stückweise lineare Interpolierende
1 / 32 Numerik für Ingenieure I Wintersemester 2008 J. Michael Fried Lehrstuhl Angewandte Mathematik III 23.1.2009 2 / 32 Wiederholung Stückweise Polynominterpolation Stückweise lineare Interpolierende
Ausgleichsproblem. Definition (1.0.3)
") Ausgleichsproblem Definition (1.0.3) Gegeben sind n Wertepaare (x i, y i ), i = 1,..., n mit x i x j für i j. Gesucht ist eine stetige Funktion f, die die Wertepaare bestmöglich annähert, d.h. dass möglichst
Ausgleichsproblem Definition (1.0.3) Gegeben sind n Wertepaare (x i, y i ), i = 1,..., n mit x i x j für i j. Gesucht ist eine stetige Funktion f, die die Wertepaare bestmöglich annähert, d.h. dass möglichst
Klausur Numerische Mathematik (für Elektrotechniker), 24. Februar 2016
, 24. Februar 2016") Verständnisfragen-Teil ( Punkte) Jeder der Verständnisfragenblöcke besteht aus Verständnisfragen. Werden alle Fragen in einem Verständnisfragenblock richtig beantwortet, so gibt es für diesen Block Punkte.
Verständnisfragen-Teil ( Punkte) Jeder der Verständnisfragenblöcke besteht aus Verständnisfragen. Werden alle Fragen in einem Verständnisfragenblock richtig beantwortet, so gibt es für diesen Block Punkte.
Interpolation und Integration mit Polynomen
 Interpolation und Integration mit Polynomen Philipp Andrea Zardo Universität Kassel 23. Februar 2006 / Kassel Outline 1 Einleitung Was ist numerische Mathematik? Die eulersche e-funktion Ein Wurzelalgorithmus
Interpolation und Integration mit Polynomen Philipp Andrea Zardo Universität Kassel 23. Februar 2006 / Kassel Outline 1 Einleitung Was ist numerische Mathematik? Die eulersche e-funktion Ein Wurzelalgorithmus
Interpolation, numerische Integration, Eigenwerte
 Neunte Vorlesung, 29. Mai 2008, Inhalt Interpolation, numerische Integration, Eigenwerte Polynomiale Interpolation (Lagrange, Newton, Neville) Splines und weitere Interpolationsverfahren numerische Integration
Neunte Vorlesung, 29. Mai 2008, Inhalt Interpolation, numerische Integration, Eigenwerte Polynomiale Interpolation (Lagrange, Newton, Neville) Splines und weitere Interpolationsverfahren numerische Integration
(x x j ) R m [x] (3) x x j x k x j. R m [x]. (4)
![(x x j ) R m [x] (3) x x j x k x j. R m [x]. (4)](/thumbs/67/57224748.jpg "(x x j ) R m [x] (3) x x j x k x j. R m [x]. (4)") 33 Interpolation 147 33 Interpolation In vielen praktischen Anwendungen der Mathematik treten Funktionen f auf, deren Werte nur näherungsweise berechnet werden können oder sogar nur auf gewissen endlichen
33 Interpolation 147 33 Interpolation In vielen praktischen Anwendungen der Mathematik treten Funktionen f auf, deren Werte nur näherungsweise berechnet werden können oder sogar nur auf gewissen endlichen
Kapitel 4: Interpolation Sei U eine Klasse von einfach strukturierten Funktionen, z.b.
 Kapitel 4: Interpolation Sei U eine Klasse von einfach strukturierten Funktionen, z.b. - Polynome, - rationale Funktionen, - trigonometrische Polynome, - Splines. Interpolationsproblem 4: Sei f : [a,b]
Kapitel 4: Interpolation Sei U eine Klasse von einfach strukturierten Funktionen, z.b. - Polynome, - rationale Funktionen, - trigonometrische Polynome, - Splines. Interpolationsproblem 4: Sei f : [a,b]
KAPITEL 9 Splinefunktionen
 KAPITEL 9 Splinefunktionen 9.1 Splineräume und Approximationsgüte Bei der Behandlung von Splines ist es bequemer, statt mit dem Grad von Polynomen, mit der Ordnung k := Grad + 1 zu arbeiten. Für eine Knotenmenge
KAPITEL 9 Splinefunktionen 9.1 Splineräume und Approximationsgüte Bei der Behandlung von Splines ist es bequemer, statt mit dem Grad von Polynomen, mit der Ordnung k := Grad + 1 zu arbeiten. Für eine Knotenmenge
Eine zweidimensionale Stichprobe
 Eine zweidimensionale Stichprobe liegt vor, wenn zwei qualitative Merkmale gleichzeitig betrachtet werden. Eine Urliste besteht dann aus Wertepaaren (x i, y i ) R 2 und hat die Form (x 1, y 1 ), (x 2,
Eine zweidimensionale Stichprobe liegt vor, wenn zwei qualitative Merkmale gleichzeitig betrachtet werden. Eine Urliste besteht dann aus Wertepaaren (x i, y i ) R 2 und hat die Form (x 1, y 1 ), (x 2,
Mischungsverhältnisse: Nehmen wir an, es stehen zwei Substanzen (zum Beispiel Flüssigkeiten) mit spezifischen Gewicht a = 2 kg/l bzw.
 mit spezifischen Gewicht a = 2 kg/l bzw.") Kapitel 5 Lineare Algebra 51 Lineare Gleichungssysteme und Matrizen Man begegnet Systemen von linearen Gleichungen in sehr vielen verschiedenen Zusammenhängen, etwa bei Mischungsverhältnissen von Substanzen
Kapitel 5 Lineare Algebra 51 Lineare Gleichungssysteme und Matrizen Man begegnet Systemen von linearen Gleichungen in sehr vielen verschiedenen Zusammenhängen, etwa bei Mischungsverhältnissen von Substanzen
QUASI-SPLINE-INTERPOLATION BEZÜGLICH GLEICHMÄSSIGER UNTERTEILUNGEN
 QUASI-SPLINE-INTERPOLATION BEZÜGLICH GLEICHMÄSSIGER UNTERTEILUNGEN IRYNA FEUERSTEIN Es wir ein Verfahren zur Konstruktion einer quasiinterpolierenden Funktion auf gleichmäßig verteilten Konten vorgestellt.
QUASI-SPLINE-INTERPOLATION BEZÜGLICH GLEICHMÄSSIGER UNTERTEILUNGEN IRYNA FEUERSTEIN Es wir ein Verfahren zur Konstruktion einer quasiinterpolierenden Funktion auf gleichmäßig verteilten Konten vorgestellt.
Numerische Verfahren
 Numerische Verfahren Interpolation Prof Dr-Ing K Warendorf, Prof Dr-Ing P Wolfsteiner Hochschule für Angewandte Wissenschaften München Fakultät 03 WS 13/14 Prof Dr-Ing K Warendorf (Fakultät 03) Numerische
Numerische Verfahren Interpolation Prof Dr-Ing K Warendorf, Prof Dr-Ing P Wolfsteiner Hochschule für Angewandte Wissenschaften München Fakultät 03 WS 13/14 Prof Dr-Ing K Warendorf (Fakultät 03) Numerische
KAPITEL 8. Interpolation
 KAPITEL 8. Interpolation 8.2 Lagrange-Interpolationsaufgabe für Polynome Wir beschränken uns auf die Lagrange-Interpolation mit Polynomen. Der Raum der Polynome vom Grad n: Stützstellen: Π n = { n j=0
KAPITEL 8. Interpolation 8.2 Lagrange-Interpolationsaufgabe für Polynome Wir beschränken uns auf die Lagrange-Interpolation mit Polynomen. Der Raum der Polynome vom Grad n: Stützstellen: Π n = { n j=0
(d) das zu Grunde liegende Problem gut konditioniert ist.
 das zu Grunde liegende Problem gut konditioniert ist.") Aufgabe 0: (6 Punkte) Bitte kreuzen Sie die richtige Lösung an. Es ist jeweils genau eine Antwort korrekt. Für jede richtige Antwort erhalten Sie einen Punkt, für jede falsche Antwort wird Ihnen ein Punkt
Aufgabe 0: (6 Punkte) Bitte kreuzen Sie die richtige Lösung an. Es ist jeweils genau eine Antwort korrekt. Für jede richtige Antwort erhalten Sie einen Punkt, für jede falsche Antwort wird Ihnen ein Punkt
Polynominterpolation. Allgemeines Problem: Beispiel 1 (Teil 1):
:") . Großübung Polynominterpolation Allgemeines Problem: Aufgrund gegebener Messwerte (Paare aus Werten i und Funktionswerten f( i )) soll ein Funktionsverlauf rekonstruiert bzw. zumeist angenähert werden.
. Großübung Polynominterpolation Allgemeines Problem: Aufgrund gegebener Messwerte (Paare aus Werten i und Funktionswerten f( i )) soll ein Funktionsverlauf rekonstruiert bzw. zumeist angenähert werden.
13 Mehrdimensionale Zufallsvariablen Zufallsvektoren
 3 Mehrdimensionale Zufallsvariablen Zufallsvektoren Bisher haben wir uns ausschließlich mit Zufallsexperimenten beschäftigt, bei denen die Beobachtung eines einzigen Merkmals im Vordergrund stand. In diesem
3 Mehrdimensionale Zufallsvariablen Zufallsvektoren Bisher haben wir uns ausschließlich mit Zufallsexperimenten beschäftigt, bei denen die Beobachtung eines einzigen Merkmals im Vordergrund stand. In diesem
D-MAVT Lineare Algebra I HS 2018 Prof. Dr. N. Hungerbühler. Lösungen = A 4 3 6
 D-MAVT Lineare Algebra I HS 28 Prof. Dr. N. Hungerbühler Lösungen. Gegeben seien die Matrizen A := ( 2 3 3 ), B := Welche der folgenden Aussagen sind richtig? (a) (AB) T = A T B T. 5 3 2 6 Die Formel (AB)
D-MAVT Lineare Algebra I HS 28 Prof. Dr. N. Hungerbühler Lösungen. Gegeben seien die Matrizen A := ( 2 3 3 ), B := Welche der folgenden Aussagen sind richtig? (a) (AB) T = A T B T. 5 3 2 6 Die Formel (AB)
9. Parametrische Kurven und Flächen
 9. Parametrische Kurven und Flächen Polylinien bzw. Polygone sind stückweise lineare Approximationen für Kurven bzw. Flächen Nachteile: hohe Zahl von Eckpunkten für genaue Repräsentation erforderlich interaktive
9. Parametrische Kurven und Flächen Polylinien bzw. Polygone sind stückweise lineare Approximationen für Kurven bzw. Flächen Nachteile: hohe Zahl von Eckpunkten für genaue Repräsentation erforderlich interaktive
Numerisches Programmieren, Übungen
 Technische Universität München SoSe 20 Institut für Informatik Prof Dr Thomas Huckle Dipl-Inf Christoph Riesinger Dipl-Math Jürgen Bräckle Numerisches Programmieren, Übungen Musterlösung 6 Übungsblatt:
Technische Universität München SoSe 20 Institut für Informatik Prof Dr Thomas Huckle Dipl-Inf Christoph Riesinger Dipl-Math Jürgen Bräckle Numerisches Programmieren, Übungen Musterlösung 6 Übungsblatt:
5. Spezielle stetige Verteilungen
 5. Spezielle stetige Verteilungen 5.1 Stetige Gleichverteilung Eine Zufallsvariable X folgt einer stetigen Gleichverteilung mit den Parametern a und b, wenn für die Dichtefunktion von X gilt: f x = 1 für
5. Spezielle stetige Verteilungen 5.1 Stetige Gleichverteilung Eine Zufallsvariable X folgt einer stetigen Gleichverteilung mit den Parametern a und b, wenn für die Dichtefunktion von X gilt: f x = 1 für
Numerische Methoden I Schriftliche Prüfung Gruppe A 23. Jan :00-14:00 (120 min)
") Lehrstuhl für Angewandte Mathematik Montanuniversität Leoben 70 004 Numerische Methoden I Schriftliche Prüfung Gruppe A 23. Jan. 207 2:00-4:00 (20 min) Name Matrikelnummer Mündliche Prüfung: Bitte markieren
Lehrstuhl für Angewandte Mathematik Montanuniversität Leoben 70 004 Numerische Methoden I Schriftliche Prüfung Gruppe A 23. Jan. 207 2:00-4:00 (20 min) Name Matrikelnummer Mündliche Prüfung: Bitte markieren
Verarbeitung von Messdaten
 HTL Steyr Verarbeitung von Messdaten Seite von 8 Bernhard Nietrost, HTL Steyr Verarbeitung von Messdaten Mathematische / Fachliche Inhalte in Stichworten: Regression, Polynominterpolation, Extremwertberechnung,
HTL Steyr Verarbeitung von Messdaten Seite von 8 Bernhard Nietrost, HTL Steyr Verarbeitung von Messdaten Mathematische / Fachliche Inhalte in Stichworten: Regression, Polynominterpolation, Extremwertberechnung,
Bestimmte Zufallsvariablen sind von Natur aus normalverteilt. - naturwissenschaftliche Variablen: originär z.b. Intelligenz, Körpergröße, Messfehler
 6.6 Normalverteilung Die Normalverteilung kann als das wichtigste Verteilungsmodell der Statistik angesehen werden. Sie wird nach ihrem Entdecker auch Gaußsche Glockenkurve genannt. Die herausragende Stellung
6.6 Normalverteilung Die Normalverteilung kann als das wichtigste Verteilungsmodell der Statistik angesehen werden. Sie wird nach ihrem Entdecker auch Gaußsche Glockenkurve genannt. Die herausragende Stellung
Lineare Gleichungssystem
 Lineare Gleichungssystem 8. Juli 07 Inhaltsverzeichnis Einleitung Der Gauß-Algorithmus 4 3 Lösbarkeit von Gleichungssystemen 6 Einleitung Wir haben uns bisher hauptsächlich mit dem Finden von Nullstellen
Lineare Gleichungssystem 8. Juli 07 Inhaltsverzeichnis Einleitung Der Gauß-Algorithmus 4 3 Lösbarkeit von Gleichungssystemen 6 Einleitung Wir haben uns bisher hauptsächlich mit dem Finden von Nullstellen
1 Umkehrfunktionen und implizite Funktionen
 Mathematik für Physiker III WS 2012/2013 Freitag 211 $Id: implizittexv 18 2012/11/01 20:18:36 hk Exp $ $Id: lagrangetexv 13 2012/11/01 1:24:3 hk Exp hk $ 1 Umkehrfunktionen und implizite Funktionen 13
Mathematik für Physiker III WS 2012/2013 Freitag 211 $Id: implizittexv 18 2012/11/01 20:18:36 hk Exp $ $Id: lagrangetexv 13 2012/11/01 1:24:3 hk Exp hk $ 1 Umkehrfunktionen und implizite Funktionen 13
Stetige Verteilungen. A: Beispiele Beispiel 1: a) In den folgenden Abbildungen sind die Dichtefunktionen von drei bekannten Verteilungen graphisch
 In den folgenden Abbildungen sind die Dichtefunktionen von drei bekannten Verteilungen graphisch") 6 Stetige Verteilungen 1 Kapitel 6: Stetige Verteilungen A: Beispiele Beispiel 1: a) In den folgenden Abbildungen sind die Dichtefunktionen von drei bekannten Verteilungen graphisch dargestellt. 0.2 6
6 Stetige Verteilungen 1 Kapitel 6: Stetige Verteilungen A: Beispiele Beispiel 1: a) In den folgenden Abbildungen sind die Dichtefunktionen von drei bekannten Verteilungen graphisch dargestellt. 0.2 6
19. Januar Universität Erlangen-Nürnberg Department Mathematik PD Dr. Markus Bause. . Danach liefert die Gauss-Elinination. .
 Universität Erlangen-Nürnberg Department Mathematik PD Dr Markus Bause Numerik I 9 Januar A Gegeben sei die Matrix A = a Führen Sie eine Zeilenskalierung der Matrix durch Klausur b Bestimmen Sie mit Hilfe
Universität Erlangen-Nürnberg Department Mathematik PD Dr Markus Bause Numerik I 9 Januar A Gegeben sei die Matrix A = a Führen Sie eine Zeilenskalierung der Matrix durch Klausur b Bestimmen Sie mit Hilfe
Numerisches Programmieren, Übungen
 Technische Universität München WiSe 07 / 08 Institut für Informatik Univ-Prof Dr Hans-Joachim Bungartz Michael Obersteiner Philipp Samfass Numerisches Programmieren, Übungen Musterlösung 3 Übungsblatt:
Technische Universität München WiSe 07 / 08 Institut für Informatik Univ-Prof Dr Hans-Joachim Bungartz Michael Obersteiner Philipp Samfass Numerisches Programmieren, Übungen Musterlösung 3 Übungsblatt:
Konfidenzintervalle Grundlegendes Prinzip Erwartungswert Bekannte Varianz Unbekannte Varianz Anteilswert Differenzen von Erwartungswert Anteilswert
 Konfidenzintervalle Grundlegendes Prinzip Erwartungswert Bekannte Varianz Unbekannte Varianz Anteilswert Differenzen von Erwartungswert Anteilswert Beispiel für Konfidenzintervall Im Prinzip haben wir
Konfidenzintervalle Grundlegendes Prinzip Erwartungswert Bekannte Varianz Unbekannte Varianz Anteilswert Differenzen von Erwartungswert Anteilswert Beispiel für Konfidenzintervall Im Prinzip haben wir
Kapitel 7. Interpolation und Approximation II. Inhalt: 7.1 Spline-Interpolation 7.2 Trigonometrische Interpolation 7.3 Tschebyscheff-Approximation
 Kapitel 7. Interpolation und Approximation II Inhalt: 7.1 Spline-Interpolation 7.2 Trigonometrische Interpolation 7.3 Tschebyscheff-Approximation Numerische Mathematik I 275 Interpolation als lineares
Kapitel 7. Interpolation und Approximation II Inhalt: 7.1 Spline-Interpolation 7.2 Trigonometrische Interpolation 7.3 Tschebyscheff-Approximation Numerische Mathematik I 275 Interpolation als lineares
Klausurlösung Einführung in Numerische Methoden und FEM Universität Siegen, Department Maschinenbau,
 Universität Siegen, Department Maschinenbau, 7.7. Aufgabe y 3 l 3 3 F l l x Das dargestellte Fachwerk soll statisch mit Hilfe der FEM untersucht werden. Die Knoten und Elemente sind in der Abbildung nummeriert.
Universität Siegen, Department Maschinenbau, 7.7. Aufgabe y 3 l 3 3 F l l x Das dargestellte Fachwerk soll statisch mit Hilfe der FEM untersucht werden. Die Knoten und Elemente sind in der Abbildung nummeriert.
Nichtlineare Gleichungssysteme
 Kapitel 5 Nichtlineare Gleichungssysteme 51 Einführung Wir betrachten in diesem Kapitel Verfahren zur Lösung von nichtlinearen Gleichungssystemen Nichtlineares Gleichungssystem: Gesucht ist eine Lösung
Kapitel 5 Nichtlineare Gleichungssysteme 51 Einführung Wir betrachten in diesem Kapitel Verfahren zur Lösung von nichtlinearen Gleichungssystemen Nichtlineares Gleichungssystem: Gesucht ist eine Lösung
Merksatz Begriff der Funktion
 Der Begriff Funktion Um uns klar zu machen, was eine Funktion (lateinisch functio) ist, betrachten wir uns die Gegenüberstellung nachfolgender Situationen. Die Temperatur eines Gewässers wird in verschiedenen
Der Begriff Funktion Um uns klar zu machen, was eine Funktion (lateinisch functio) ist, betrachten wir uns die Gegenüberstellung nachfolgender Situationen. Die Temperatur eines Gewässers wird in verschiedenen
VF-2: 2. Es seien x = 1 3 und y = π Bei der Berechnung von sin(x) sin(y) in M(10, 12, 99, 99) tritt. Auslöschung auf.
 sin(y) in M(10, 12, 99, 99) tritt. Auslöschung auf.") IGPM RWTH Aachen Verständnisfragen-Teil NumaMB H11 (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Es müssen mindestens zwei
IGPM RWTH Aachen Verständnisfragen-Teil NumaMB H11 (24 Punkte) Es gibt zu jeder der 12 Aufgaben vier Teilaufgaben. Diese sind mit wahr bzw. falsch zu kennzeichnen (hinschreiben). Es müssen mindestens zwei
Musterlösungen zur Leistungsnachweisklausur vom Studiengang Informatik, Ingenieurinformatik, Lehramt
 TU ILMENAU Institut für Mathematik Numerische Mathematik PD Dr. W. Neundorf Musterlösungen zur Leistungsnachweisklausur vom.0.006 Studiengang Informatik, Ingenieurinformatik, Lehramt 1. Lineare Algebra
TU ILMENAU Institut für Mathematik Numerische Mathematik PD Dr. W. Neundorf Musterlösungen zur Leistungsnachweisklausur vom.0.006 Studiengang Informatik, Ingenieurinformatik, Lehramt 1. Lineare Algebra
Integraldarstellung des Restgliedes; Lagrangesche Restgliedformel;
 Kapitel Der Satz von Taylor. Taylor-Formel und Taylor-Reihe (Taylor-Polynom; Restglied; Integraldarstellung des Restgliedes; Lagrangesche Restgliedformel; die Klasse C ; reell analytische Funktionen) In
Kapitel Der Satz von Taylor. Taylor-Formel und Taylor-Reihe (Taylor-Polynom; Restglied; Integraldarstellung des Restgliedes; Lagrangesche Restgliedformel; die Klasse C ; reell analytische Funktionen) In
Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II. x 2
 Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II Wiederholungsblatt: Analysis Sommersemester 2011 W. Werner, F. Springer erstellt von: Max Brinkmann Aufgabe 1: Untersuchen Sie, ob die
Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II Wiederholungsblatt: Analysis Sommersemester 2011 W. Werner, F. Springer erstellt von: Max Brinkmann Aufgabe 1: Untersuchen Sie, ob die
Extremwerte von Funktionen mehrerer reeller Variabler
 Extremwerte von Funktionen mehrerer reeller Variabler Bei der Bestimmung der Extrema von (differenzierbaren) Funktionen f : R n R ist es sinnvoll, zuerst jene Stellen zu bestimmen, an denen überhaupt ein
Extremwerte von Funktionen mehrerer reeller Variabler Bei der Bestimmung der Extrema von (differenzierbaren) Funktionen f : R n R ist es sinnvoll, zuerst jene Stellen zu bestimmen, an denen überhaupt ein
3.6 Eigenwerte und Eigenvektoren
 3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
Optimierung. Optimierung. Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren. 2013 Thomas Brox, Fabian Kuhn
 Optimierung Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren 1 Minimierung ohne Nebenbedingung Ein Optimierungsproblem besteht aus einer zulässigen Menge und einer Zielfunktion Minimum
Optimierung Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren 1 Minimierung ohne Nebenbedingung Ein Optimierungsproblem besteht aus einer zulässigen Menge und einer Zielfunktion Minimum
Beispiel für eine periodische Spline-Interpolationsfunktion: Wir betrachten f(x) = sin(πx) und geben die folgenden Stützstellen und Stützwerte vor:
 = sin(πx) und geben die folgenden Stützstellen und Stützwerte vor:") 5 Splineinterpolation Beispiel für eine periodische Spline-Interpolationsfunktion: Wir betrachten f(x) sin(πx) und geben die folgenden Stützstellen und Stützwerte vor: x i 3 f i Damit ist n 5, h Forderung
5 Splineinterpolation Beispiel für eine periodische Spline-Interpolationsfunktion: Wir betrachten f(x) sin(πx) und geben die folgenden Stützstellen und Stützwerte vor: x i 3 f i Damit ist n 5, h Forderung
Mathematik für Bauingenieure
 Mathematik für Bauingenieure von Kerstin Rjasanowa 1. Auflage Mathematik für Bauingenieure Rjasanowa schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG Hanser München 2006 Verlag C.H.
Mathematik für Bauingenieure von Kerstin Rjasanowa 1. Auflage Mathematik für Bauingenieure Rjasanowa schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG Hanser München 2006 Verlag C.H.
3.1.3 Newtonsche Interpolationsformel / Dividierte Differenzen
 KAPITEL 3 INTERPOLATION UND APPROXIMATION 4 33 Newtonsche Interpolationsformel / Dividierte Differenzen Das Verfahren von Neville ist unpraktisch, wenn man das Polynom selbst sucht oder das Polynom an
KAPITEL 3 INTERPOLATION UND APPROXIMATION 4 33 Newtonsche Interpolationsformel / Dividierte Differenzen Das Verfahren von Neville ist unpraktisch, wenn man das Polynom selbst sucht oder das Polynom an
T n (1) = 1 T n (cos π n )= 1. deg T n q n 1.
 = 1 T n (cos π n )= 1. deg T n q n 1.") KAPITEL 3. INTERPOLATION UND APPROXIMATION 47 Beweis: Wir nehmen an qx) für alle x [, ] und führen diese Annahme zu einem Widerspruch. Es gilt nach Folgerung ii) T n ) T n cos π n ). Wir betrachten die
KAPITEL 3. INTERPOLATION UND APPROXIMATION 47 Beweis: Wir nehmen an qx) für alle x [, ] und führen diese Annahme zu einem Widerspruch. Es gilt nach Folgerung ii) T n ) T n cos π n ). Wir betrachten die
2. Spezielle anwendungsrelevante Funktionen
 2. Spezielle anwendungsrelevante Funktionen (1) Affin-lineare Funktionen Eine Funktion f : R R heißt konstant, wenn ein c R mit f (x) = c für alle x R existiert linear, wenn es ein a R mit f (x) = ax für
2. Spezielle anwendungsrelevante Funktionen (1) Affin-lineare Funktionen Eine Funktion f : R R heißt konstant, wenn ein c R mit f (x) = c für alle x R existiert linear, wenn es ein a R mit f (x) = ax für
KAPITEL 10. Numerische Integration
 KAPITEL 10. Numerische Integration 10.1 Einleitung Sei Es gilt I Ĩ = b I = b a a f(x) f(x) dx f(x) dx, Ĩ = b b a f(x) dx. a f(x) f(x) dx (b a) f f. I Ĩ I (b a) f f b a f(x) dx = ba f dx b a f(x) dx f f
KAPITEL 10. Numerische Integration 10.1 Einleitung Sei Es gilt I Ĩ = b I = b a a f(x) f(x) dx f(x) dx, Ĩ = b b a f(x) dx. a f(x) f(x) dx (b a) f f. I Ĩ I (b a) f f b a f(x) dx = ba f dx b a f(x) dx f f
Spline-Interpolation
 Spline-Interpolation Tim Schmölzer 20 November 2009 Tim Schmölzer Spline-Interpolation 20 November 2009 1 / 38 Übersicht 1 Vorbemerkungen 2 Lösbarkeit des Interpolationsproblems 3 Stabilität der Interpolation
Spline-Interpolation Tim Schmölzer 20 November 2009 Tim Schmölzer Spline-Interpolation 20 November 2009 1 / 38 Übersicht 1 Vorbemerkungen 2 Lösbarkeit des Interpolationsproblems 3 Stabilität der Interpolation
Wenn man den Kreis mit Radius 1 um (0, 0) beschreiben möchte, dann ist. (x, y) ; x 2 + y 2 = 1 }
 beschreiben möchte, dann ist. (x, y) ; x 2 + y 2 = 1 }") A Analsis, Woche Implizite Funktionen A Implizite Funktionen in D A3 Wenn man den Kreis mit Radius um, beschreiben möchte, dann ist { x, ; x + = } eine Möglichkeit Oft ist es bequemer, so eine Figur oder
A Analsis, Woche Implizite Funktionen A Implizite Funktionen in D A3 Wenn man den Kreis mit Radius um, beschreiben möchte, dann ist { x, ; x + = } eine Möglichkeit Oft ist es bequemer, so eine Figur oder
1 Singulärwertzerlegung und Pseudoinverse
 Singulärwertzerlegung und Pseudoinverse Singulärwertzerlegung A sei eine Matrix mit n Spalten und m Zeilen. Zunächst sei n m. Bilde B = A A. Dies ist eine n n-matrix. Berechne die Eigenwerte von B. Diese
Singulärwertzerlegung und Pseudoinverse Singulärwertzerlegung A sei eine Matrix mit n Spalten und m Zeilen. Zunächst sei n m. Bilde B = A A. Dies ist eine n n-matrix. Berechne die Eigenwerte von B. Diese
Systeme von Differentialgleichungen. Beispiel 1: Chemische Reaktionssysteme. Beispiel 2. System aus n Differentialgleichungen 1. Ordnung: y 1.
 Systeme von Differentialgleichungen Beispiel : Chemische Reaktionssysteme System aus n Differentialgleichungen Ordnung: y (x = f (x, y (x,, y n (x Kurzschreibweise: y y 2 (x = f 2(x, y (x,, y n (x y n(x
Systeme von Differentialgleichungen Beispiel : Chemische Reaktionssysteme System aus n Differentialgleichungen Ordnung: y (x = f (x, y (x,, y n (x Kurzschreibweise: y y 2 (x = f 2(x, y (x,, y n (x y n(x
7 Integralrechnung für Funktionen einer Variablen
 7 Integralrechnung für Funktionen einer Variablen In diesem Kapitel sei stets D R, und I R ein Intervall. 7. Das unbestimmte Integral (Stammfunktion) Es sei f : I R eine Funktion. Eine differenzierbare
7 Integralrechnung für Funktionen einer Variablen In diesem Kapitel sei stets D R, und I R ein Intervall. 7. Das unbestimmte Integral (Stammfunktion) Es sei f : I R eine Funktion. Eine differenzierbare
Übungen mit dem Applet Interpolationspolynome
 Interpolationspolynome 1 Übungen mit dem Applet Interpolationspolynome 1 Ziele des Applets... 2 2 Übungen mit dem Applet... 2 2.1 Punkte... 3 2.2 y=sin(x)... 3 2.3 y=exp(x)... 4 2.4 y=x 4 x 3 +2x 2 +x...
Interpolationspolynome 1 Übungen mit dem Applet Interpolationspolynome 1 Ziele des Applets... 2 2 Übungen mit dem Applet... 2 2.1 Punkte... 3 2.2 y=sin(x)... 3 2.3 y=exp(x)... 4 2.4 y=x 4 x 3 +2x 2 +x...
5 Differenzialrechnung für Funktionen einer Variablen
 5 Differenzialrechnung für Funktionen einer Variablen Ist f eine ökonomische Funktion, so ist oft wichtig zu wissen, wie sich die Funktion bei kleinen Änderungen verhält. Beschreibt etwa f einen Wachstumsprozess,
5 Differenzialrechnung für Funktionen einer Variablen Ist f eine ökonomische Funktion, so ist oft wichtig zu wissen, wie sich die Funktion bei kleinen Änderungen verhält. Beschreibt etwa f einen Wachstumsprozess,
Musterlösung zum Übungsblatt Interpolation nach Newton, Nevill, Lagrange.
 Angewandte Mathematik Ing.-Wiss., HTWdS Dipl.-Math. Dm. Ovrutskiy Musterlösung zum Übungsblatt Interpolation nach Newton, Nevill, Lagrange. Aufgabe 1 Approximieren Sie cos(x) auf [ /, /] an drei Stützstellen
Angewandte Mathematik Ing.-Wiss., HTWdS Dipl.-Math. Dm. Ovrutskiy Musterlösung zum Übungsblatt Interpolation nach Newton, Nevill, Lagrange. Aufgabe 1 Approximieren Sie cos(x) auf [ /, /] an drei Stützstellen
4 Lineare Algebra (Teil 2): Quadratische Matrizen
: Quadratische Matrizen") 4 Lineare Algebra (Teil : Quadratische Matrizen Def.: Eine (n n-matrix, die also ebensoviele Zeilen wie Spalten hat, heißt quadratisch. Hat sie außerdem den Rang n, sind also ihre n Spalten linear unabhängig,
4 Lineare Algebra (Teil : Quadratische Matrizen Def.: Eine (n n-matrix, die also ebensoviele Zeilen wie Spalten hat, heißt quadratisch. Hat sie außerdem den Rang n, sind also ihre n Spalten linear unabhängig,
Klausur Mathematik, 1. Oktober 2012, A
 Klausur, Mathematik, Oktober 2012, Lösungen, A 1 Klausur Mathematik, 1. Oktober 2012, A Die Klausureinsicht ist Do, 8.11.2012 um 18:00 in MZG 8.136. Die Klausur ist mit 30 Punkten bestanden. Falls Sie
Klausur, Mathematik, Oktober 2012, Lösungen, A 1 Klausur Mathematik, 1. Oktober 2012, A Die Klausureinsicht ist Do, 8.11.2012 um 18:00 in MZG 8.136. Die Klausur ist mit 30 Punkten bestanden. Falls Sie
Kapitel 9: Lineare Gleichungssysteme
 Kapitel 9: Lineare Gleichungssysteme Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz Stefan Ruzika (KO) Kapitel 9: Lineare Gleichungssysteme 1 / 15 Gliederung 1 Grundbegriffe
Kapitel 9: Lineare Gleichungssysteme Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz Stefan Ruzika (KO) Kapitel 9: Lineare Gleichungssysteme 1 / 15 Gliederung 1 Grundbegriffe
Übungsblatt 1 Musterlösung
 Numerik gewöhnlicher Differentialgleichungen MA234 - SS6 Übungsblatt Musterlösung Aufgabe (Interpolationspolynom) a) Bestimmen Sie die Hilfspolynome L i, i =,,2, für x =, x = 2 und x 2 = 3 nach der Formel
Numerik gewöhnlicher Differentialgleichungen MA234 - SS6 Übungsblatt Musterlösung Aufgabe (Interpolationspolynom) a) Bestimmen Sie die Hilfspolynome L i, i =,,2, für x =, x = 2 und x 2 = 3 nach der Formel
A2.3 Lineare Gleichungssysteme
 A2.3 Lineare Gleichungssysteme Schnittpunkte von Graphen Bereits weiter oben wurden die Schnittpunkte von Funktionsgraphen mit den Koordinatenachsen besprochen. Wenn sich zwei Geraden schneiden, dann müssen
A2.3 Lineare Gleichungssysteme Schnittpunkte von Graphen Bereits weiter oben wurden die Schnittpunkte von Funktionsgraphen mit den Koordinatenachsen besprochen. Wenn sich zwei Geraden schneiden, dann müssen
Numerische Verfahren
 Numerische Verfahren Jens-Peter M. Zemke zemke@tu-harburg.de Institut für Numerische Simulation Technische Universität Hamburg-Harburg 08.04.2008 TUHH Jens-Peter M. Zemke Numerische Verfahren 1 / 68 Übersicht
Numerische Verfahren Jens-Peter M. Zemke zemke@tu-harburg.de Institut für Numerische Simulation Technische Universität Hamburg-Harburg 08.04.2008 TUHH Jens-Peter M. Zemke Numerische Verfahren 1 / 68 Übersicht
Kevin Caldwell. 18.April 2012
 im Rahmen des Proseminars Numerische Lineare Algebra von Prof.Dr.Sven Beuchler 18.April 2012 Gliederung 1 2 3 Mathematische Beschreibung von naturwissenschaftlich-technischen Problemstellungen führt häufig
im Rahmen des Proseminars Numerische Lineare Algebra von Prof.Dr.Sven Beuchler 18.April 2012 Gliederung 1 2 3 Mathematische Beschreibung von naturwissenschaftlich-technischen Problemstellungen führt häufig
[5], [0] v 4 = + λ 3
![[5], [0] v 4 = + λ 3](/thumbs/62/48038195.jpg "[5], [0] v 4 = + λ 3") Aufgabe 9. Basen von Untervektorräumen. Bestimmen Sie Basen von den folgenden Untervektorräumen U K des K :. K = R und U R = span,,,,,.. K = C und U C = span + i, 6, i. i i + 0. K = Z/7Z und U Z/7Z = span
Aufgabe 9. Basen von Untervektorräumen. Bestimmen Sie Basen von den folgenden Untervektorräumen U K des K :. K = R und U R = span,,,,,.. K = C und U C = span + i, 6, i. i i + 0. K = Z/7Z und U Z/7Z = span
Mathematik für Naturwissenschaftler II SS 2010
 Mathematik für Naturwissenschaftler II SS 2010 Lektion 12 8. Juni 2010 Kapitel 10. Lineare Gleichungssysteme (Fortsetzung) Umformung auf obere Dreiecksgestalt Determinantenberechnung mit dem Gauß-Verfahren
Mathematik für Naturwissenschaftler II SS 2010 Lektion 12 8. Juni 2010 Kapitel 10. Lineare Gleichungssysteme (Fortsetzung) Umformung auf obere Dreiecksgestalt Determinantenberechnung mit dem Gauß-Verfahren
Numerisches Programmieren, Übungen
 Technische Universität München SS 2011 Institut für Informatik Prof Dr Thomas Huckle Dipl-Inf Christoph Riesinger Dr Slobodan Ilic Numerisches Programmieren, Übungen 6 Übungsblatt: Stückweise Interpolation
Technische Universität München SS 2011 Institut für Informatik Prof Dr Thomas Huckle Dipl-Inf Christoph Riesinger Dr Slobodan Ilic Numerisches Programmieren, Übungen 6 Übungsblatt: Stückweise Interpolation
$Id: lgs.tex,v /11/26 08:24:56 hk Exp hk $ Definition 5.1: Ein lineares Gleichungssystem besteht aus m linearen Gleichungen
 $Id: lgs.tex,v 1.2 2008/11/26 08:24:56 hk Exp hk $ II. Lineare Algebra 5 Lineare Gleichungssysteme Definition 5.1: Ein lineares Gleichungssystem besteht aus m linearen Gleichungen a 11 x 1 + a 12 x 2 +
$Id: lgs.tex,v 1.2 2008/11/26 08:24:56 hk Exp hk $ II. Lineare Algebra 5 Lineare Gleichungssysteme Definition 5.1: Ein lineares Gleichungssystem besteht aus m linearen Gleichungen a 11 x 1 + a 12 x 2 +
7.1 Matrizen und Vektore
 7.1 Matrizen und Vektore Lineare Gleichungssysteme bestehen aus einer Gruppe von Gleichungen, in denen alle Variablen nur in der 1. Potenz vorkommen. Beispiel Seite 340 oben: 6 x 2 = -1 + 3x 2 = 4 mit
7.1 Matrizen und Vektore Lineare Gleichungssysteme bestehen aus einer Gruppe von Gleichungen, in denen alle Variablen nur in der 1. Potenz vorkommen. Beispiel Seite 340 oben: 6 x 2 = -1 + 3x 2 = 4 mit
8 Interpolation. 8.1 Problemstellung. Gegeben: Diskrete Werte einer Funktion f : R R an n + 1 Stützstellen. x 0 < x 1 <... < x n.
 8 Interpolation 81 Problemstellung Gegeben: Diskrete Werte einer Funktion f : R R an n + 1 Stützstellen x 0 < x 1 < < x n Eingabedaten: (x 0, f 0 ),(x 1, f 1 ),,(x n, f n ) Gegebene Daten (x j, f j ) Analysis
8 Interpolation 81 Problemstellung Gegeben: Diskrete Werte einer Funktion f : R R an n + 1 Stützstellen x 0 < x 1 < < x n Eingabedaten: (x 0, f 0 ),(x 1, f 1 ),,(x n, f n ) Gegebene Daten (x j, f j ) Analysis
Interpolation und Approximation
 Interpolation und Approximation Fakultät Grundlagen Mai 2006 Fakultät Grundlagen Interpolation und Approximation Übersicht 1 Problemstellung Polynominterpolation 2 Kubische Fakultät Grundlagen Interpolation
Interpolation und Approximation Fakultät Grundlagen Mai 2006 Fakultät Grundlagen Interpolation und Approximation Übersicht 1 Problemstellung Polynominterpolation 2 Kubische Fakultät Grundlagen Interpolation
6.1 Welche Matrix gehört zu der Abbildung?
 Kapitel 6 Gleichungssysteme Bisher haben wir nur für spezielle Fälle (Drehungen, Spiegelungen ) die zu einer bekannten Abbildung gehörende Matrix gesucht. Da uns die Abbildung in allen Einzelheiten bekannt
Kapitel 6 Gleichungssysteme Bisher haben wir nur für spezielle Fälle (Drehungen, Spiegelungen ) die zu einer bekannten Abbildung gehörende Matrix gesucht. Da uns die Abbildung in allen Einzelheiten bekannt
5 Eigenwerte und die Jordansche Normalform
 Mathematik für Ingenieure II, SS 9 Freitag 6 $Id: jordantex,v 7 9/6/ :8:5 hk Exp $ 5 Eigenwerte und die Jordansche Normalform 5 Die Jordansche Normalform Nachdem wir bisher das Vorgehen zur Berechnung
Mathematik für Ingenieure II, SS 9 Freitag 6 $Id: jordantex,v 7 9/6/ :8:5 hk Exp $ 5 Eigenwerte und die Jordansche Normalform 5 Die Jordansche Normalform Nachdem wir bisher das Vorgehen zur Berechnung
Statistik III. Walter Zucchini Fred Böker Andreas Stadie
 Statistik III Walter Zucchini Fred Böker Andreas Stadie Inhaltsverzeichnis 1 Zufallsvariablen und ihre Verteilung 1 1.1 Diskrete Zufallsvariablen........................... 1 1.2 Stetige Zufallsvariablen............................
Statistik III Walter Zucchini Fred Böker Andreas Stadie Inhaltsverzeichnis 1 Zufallsvariablen und ihre Verteilung 1 1.1 Diskrete Zufallsvariablen........................... 1 1.2 Stetige Zufallsvariablen............................
Klausur,,Algorithmische Mathematik II
 Institut für angewandte Mathematik Sommersemester 017 Andreas Eberle, Matthias Erbar / Behrend Heeren Klausur,,Algorithmische Mathematik II Musterlösung 1 (Unabhängige Zufallsvariablen) a) Wir bezeichnen
Institut für angewandte Mathematik Sommersemester 017 Andreas Eberle, Matthias Erbar / Behrend Heeren Klausur,,Algorithmische Mathematik II Musterlösung 1 (Unabhängige Zufallsvariablen) a) Wir bezeichnen
gekrümmte Flächen / Freiformflächen (analog zur Kurvendarstellung)
") 7. Modelle für Flächen gekrümmte Flächen / Freiformflächen (analog zur Kurvendarstellung) man unterscheidet 2 Typen: finite Interpolationen / Approximationen: endliche Zahl von Stützstellen / Kontrollpunkten
7. Modelle für Flächen gekrümmte Flächen / Freiformflächen (analog zur Kurvendarstellung) man unterscheidet 2 Typen: finite Interpolationen / Approximationen: endliche Zahl von Stützstellen / Kontrollpunkten
Diagonalisierbarkeit symmetrischer Matrizen
 ¾ Diagonalisierbarkeit symmetrischer Matrizen a) Eigenwerte und Eigenvektoren Die Matrix einer linearen Abbildung ³: Î Î bezüglich einer Basis ( Ò ) ist genau dann eine Diagonalmatrix wenn jeder der Basisvektoren
¾ Diagonalisierbarkeit symmetrischer Matrizen a) Eigenwerte und Eigenvektoren Die Matrix einer linearen Abbildung ³: Î Î bezüglich einer Basis ( Ò ) ist genau dann eine Diagonalmatrix wenn jeder der Basisvektoren
GMA. Grundlagen Mathematik und Analysis. Nullstellen und Fixpunkte Reelle Funktionen 3. Christian Cenker Gabriele Uchida
 GMA Grundlagen Mathematik und Analysis Reelle Funktionen 3 Christian Cenker Gabriele Uchida Data Analytics and Computing Nullstellen cos log : 0, 0,? 1 Fixpunkte Beispiel 1 Beispiel 2 1 0 0 und 1 1sin,?
GMA Grundlagen Mathematik und Analysis Reelle Funktionen 3 Christian Cenker Gabriele Uchida Data Analytics and Computing Nullstellen cos log : 0, 0,? 1 Fixpunkte Beispiel 1 Beispiel 2 1 0 0 und 1 1sin,?
Fehler- und Ausgleichsrechnung
 Fehler- und Ausgleichsrechnung Daniel Gerth Daniel Gerth (JKU) Fehler- und Ausgleichsrechnung 1 / 12 Überblick Fehler- und Ausgleichsrechnung Dieses Kapitel erklärt: Wie man Ausgleichsrechnung betreibt
Fehler- und Ausgleichsrechnung Daniel Gerth Daniel Gerth (JKU) Fehler- und Ausgleichsrechnung 1 / 12 Überblick Fehler- und Ausgleichsrechnung Dieses Kapitel erklärt: Wie man Ausgleichsrechnung betreibt