Computergrafik 1 2. Teil: Bildverarbeitung
|
|
|
- Kasimir Pohl
- vor 6 Jahren
- Abrufe
Transkript
1 1 Computergrafik 1 2. Teil: Bildverarbeitung Digitalfotografie, Abtastung von Bildern, Konvolution und Korrelation, Fouriertransformation
2 2 Themen heute Bilder aus der Digitalfotografie Kontrastumfang, Histogramme Kurzeinführung Zonensystem High Dynamic Range (HDR) Bilder Abtastung von Bildern Sampling Aliasing Moire Muster Konvolution und Korrelation Fourier-Transformation (Anfang)
3 3 Bilder aus der Digitalfotografie
4 4 Kontrastumfang einer Szene Mitteltöne Lichter Schatten
5 5 Kontrastumfänge versch. Medien Auge: 2 10 ohne Irisanpassung 2 20 mit Irisanpassung Schwarzweißfilm: ca. 2 8 Push-Entwicklung: 2 7 Pull-Entwicklung: 2 9 Moderner Farbnegativfilm: 2 10 Diafilm: 2 5 Digitalkamera: EOS 10D bei 400 ASA: 2 9
6 6 Histogramm eines Bildes Relative Anzahl der Pixel im Bild je Helligkeit Wichtiges Instrument zur Beurteilung der Datenqualität

7 7 Histogramme der Farbkanäle

8 8 Über- und Unterbelichtung

9 9 Kontrastanhebung und -absenkung
![10 Exkurs: Zonensystem (Ansel Adams) Ansel Adams [1902-1984] Landschaftsfotografie in S/W in Perfektion Verwendeter Prozess: S/W Negativfilm (Großformat) Abzug auf S/W Papier](/docs-images/72/67273831/images/10-0.jpg "Komplette Steuerung der Entwicklungsprozesse für Negativ und Positiv Abwedeln und Nachbelichten zur Steuerung lokaler Bildhelligkeit Definition von 10 Zonen für Helligkeiten im")
10 10 Exkurs: Zonensystem (Ansel Adams) Ansel Adams [ ] Landschaftsfotografie in S/W in Perfektion Verwendeter Prozess: S/W Negativfilm (Großformat) Abzug auf S/W Papier Komplette Steuerung der Entwicklungsprozesse für Negativ und Positiv Abwedeln und Nachbelichten zur Steuerung lokaler Bildhelligkeit Definition von 10 Zonen für Helligkeiten im Bild
11 Schwärzungskurve von Filmen 3,0000 2,2500 1,5000 0, X-Achse: Logarithmus der Belichtung (entspr. Blenden- oder Zeitstufen) Y-Achse: Dichte des geschwärzten Films, ebenfalls logarithmische Einheit Kurve best. aus Fuß, linearem Bereich, Schulter LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
12 12 Definition der Zonen Jede Zone entspricht einer Belichtungsstufe, also der Verdopplung der Lichtmenge Durch Wahl der nächstkleineren Blendenzahl Oder durch Verdopplung der Belichtungszeit Durchgezeichneter Bereich Kopierfähiger Bereich Tiefschwarz bis Papierweiss 0 I II III IV V VI VII VIII IX X


13 Definition der Zonen II: tiefe Schatten fast ohne Details III: voll durchgezeichnete Schatten IV: dunkles Laubwerk V: Neutralgrau mit 18% Reflexion VI: mittlere Hauttöne VII: helle Hauttöne, Schneeflächen VIII: noch gezeichnete Lichter IX: fast Papierweiss ohne Details 0 I II III IV V VI VII VIII IX X LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
14 14 Abbildung der Szene in Zonen Bei normalem Kontrastumfang: Schatten in Zone III Lichter <= Zone VIII? Bei zu hohem Kontrastumfang der Szene: Bewusster Verzicht auf Details in Lichtern oder Schatten Verkürzte Filmentwicklung und verlängerte Belichtung Bei zu niedrigem Kontrastumfang: Abzug auf hartes Papier (d.h. mit hohem Kontrast) Verlängerte Filmentwicklung und verkürzte Belichtung Ziel: volle Ausnutzung des Kontrastumfangs des Films, aber überall noch volle Detailzeichnung

15 15 Abbildung der Szene in Zonen

16 16 Auswirkung am Histogramm
17 17 Übertragung auf digitale Fotografie Bewusste Steuerung der Helligkeit durch Spotmessung auf mittleres Grau Digitale Bildsensoren kritisch in den Lichtern Warnfunktion mancher Kameras benutzen Im Zweifel eher knapper belichten Wenn Zeit genug: Belichtungsreihe Aufhellblitz zur Kontrastreduktion Reduktion vom Bildsensor (12 Bit) auf JPEG (8 Bit) findet schon in der Kamera statt RAW Format verwenden, um Details in Lichtern und Schatten zu erhalten Kontrastanpassung später am Histogramm

18 18 High Dynamic Range (HDR) Bilder Ziel: Kontrastumfang der Natur adäquat darstellen (z.b ) 1. Problem: beschränkter Dynamikumfang der Aufnahmesensoren 2. Problem: Bildformate haben nur 8 oder 16 Bit Dynamikumfang je Farbkanal Bildquelle: (Auch folgende n)
19 19 Repräsentation von HDR im Rechner Einfacher Trick: Pixelwerte nicht als 8 oder 16 Bit Integers, sondern 32 oder 48 Bit Integer 16 Bit Floats 32 Bit Floats Verschiedene Formate vorgeschlagen Portable Float maps (PFM, wie PPM) floating point TIFF



20 20 Erzeugung von HDR Bildern Spezielle HDR Kameras Raytracing bzw. Rendering Belichtungsreihe und Kombination mittels Photoshop oder HDRshop
 (Quelle http://www.brightsidetech.")
21 21 Anzeige von HDR Bildern Bis vor kurzem garnicht ;-) Heute HDR-Displays, Kontrastumfang bis 1: (2 18 ) (Quelle Grundidee: Hintergrundbeleuchtung aus einzelnen weißen LEDs Kann je Pixelgruppe Hell oder Dunkel sein

22 22 Konvertierung auf LDR Verfahren: Tone mapping z.b. manuell in Photoshop mittels dodge and burn Automatisch: aktuelles Forschungsgebiet

23 23 Tone mapping mit lokalen Mittelwerten

24 24 Tone mapping mit lokalen Mittelwerten
25 25 Tone mapping am Histogramm Kernidee: ignoriere leere Stellen im Histogramm Schiebe restliche Bildteile im Histogramm zusammen

26 26

27 27
28 28 Linksammlung resources.html
29 29 Abtastung Digitaler Bilder
 Entspricht mathematisch der Multiplikation mit einer Impulsfolge (Summe verschobener Impulsfunktionen) Impulsfunktion δ (oder Dirac-")
30 30 Abtastung einer Szene Bildhelligkeit wird nicht für beliebige x,y kontinuierlich gemessen Messung nur an bestimmten Stellen, bzw. Integration über bestimmte Bereiche (Pixel) Entspricht mathematisch der Multiplikation mit einer Impulsfolge (Summe verschobener Impulsfunktionen) Impulsfunktion δ (oder Dirac- Funktion):

31 31 Abtasttheorem von Nyquist-Shannon Ein digitales Signal mit maximalem Frequenzanteil f max muss mit mehr als der doppelten Frequenz 2 f max abgetastet werden
32 Aliasing Durch Unterabtastung (f abtast < 2 f max ) entstehendes falsches Signal Frequenz des Aliasing-Signals = Differenz aus Original- und Abtastsignal Schwebungstöne beim Stimmen einer Gitarre LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS



33 33 Aliasing in digitalen Bildern Film-Beispiel
34 34 Moiree Muster
35 35 Verhinderung von Aliasing-Effekten Begrenzung der maximalen Signalfrequenz Bei Digitalkameras: unscharfe Optik Weichzeichner vor dem Bildsensor Supersampling mit höherer Samplingfrequenz und dann tiefpassfiltern Beispiel: Antialisaing durch Supersampling beim Zeichnen von Linien in einen Framebuffer (siehe 3DCG Teil dieser Vorlesung)
36 36 Konvolution, Korrelation
37 37 Lineare Operatoren auf Bildern Seien f, g abgetastete Bilder, a,b, Skalare O ist ein linearer Operator, falls gilt: Beispiel: Bild abdunkeln: O(f(i,j)) = 0.5 f(i,j)
38 38 Hintereinanderschreiben von Pixeln 2-dimensionales Bild wird zu einem langen 1- dimensionalen Vektor
39 39 Linearer Operator als Matrix O lässt sich auch als Matrix ausdrücken: Seien x,y die hintereinandergeschriebenen Pixel zweier Bilder, dann ist Wobei A quadratisch mit Rang der Pixelanzahl und jeder Eintrag A i,j gibt an, mit welchem Gewicht Pixel j aus x auf Pixel i in y abgebildet wird
40 40 Verschiebungsinvariante Operatoren sind lineare Operatoren, deren Wirkung unabhängig vom Ort ist: Beispiel: gleichmäßige Unschärfe im Bild durch Bewegung der Kamera
41 41 Konvolution (Faltung) Seien f, g abgetastete Bilder mit unendlicher Größe, m,n, Skalare Heißt Konvolution der Funktion f mit g g heißt die Konvolutionsfunktion Funktioniert so nur für unendlich große Bilder
42 42 Eigenschaften der Konvolution Linear & verschiebungsinvariant Kommutativ & assoziativ D.h. wir können mehrere Konvolutionen vorab kombinieren und dann gemeinsam anwenden
43 43 Konvolution vereinfacht Hat die Konvolutionsfunktion g nur einen begrenzten Bereich, in dem g!= 0, dann heisst dieser Bereich Kern von g (kernel)
44 44 Konvolution anschaulich

45 45 Verwendung der Konvolution * =
46 46 Punktantwort (point spread function, PSF) Faltung eines einzelnen Dirac-Impulses Bild mit einem einzigen schwarzen Pixel Abgetastetes Bild = Folge von Dirac- Impulsen * Pixelhelligkeiten Gesamtwirkung durch PSF vollständig beschrieben falls PSF umkehrbar, kann Wirkung theoretisch rückgängig gemacht werden scheitert praktisch an Numerik PSF kann experimentell bestimmt werden
47 47 Korrelation Seien f, g abgetastete Bilder mit unendlicher Größe, m,n, Skalare Heißt Korrelation der Funktion f mit g g heißt die Korrelationsfunktion Funktioniert so nur für unendlich große Bilder Vereinfachung siehe Konvolution

")


48 Verwendung der Korrelation Ausgangsbild (f) Korrelationsfunktion (g) Ergebnis (g*f) LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009..normalisiert 48
49 49 Unterschiede Konvolution/Korrelation Nur verschieden in der Reihenfolge der Anwendung von g Gleich, falls der Kern von g symmetrisch unter 180 Rotation Beispiele: 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 Tiefpass Hochpass
50 50 Tiefpass: Wirkung 1/9 1/9 1/9 * 1/9 1/9 1/9 = 1/9 1/9 1/9 Nützlich z.b. gegen Rauschen und Alias-Effekte

51 51 Hochpass: Wirkung * = Nützlich zum Scharfzeichnen und Kanten finden
52 52 Fouriertransformation

53 Fourier Jean Baptiste Jposeph Fourier ( ) Französischer Physiker und Mathematiker Erfinder der Fouriertransformation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
54 54 Fouriertransformation: Grundidee Beschreibe beliebige Funktion als gewichtete Summe periodischer Grundfunktionen (Basisfunktionen) mit untersch. Frequenz
55 55 Periodische Funktionen
56 56 Fouriers Theorem Jede beliebige periodische Funktion läßt sich darstellen als Summe von cos und sin Funktionen unterschiedlicher Frequenzen. 1. Ist die Funktion nicht periodisch, aber auf einen bestimmten Definitionsbereich beschränkt, so kann man diesen Bereich einfach kopieren (periodisch fortsetzen) und hat damit wieder eine periodische Funktion. 2. Ein Bild kann man als Zeilen und Spalten von nichtperiodischen Funktionen auffassen. Man kann also auch ein Bild fouriertransformieren.
57 57 Motivation (1) Manche Operationen sind im Ortsraum (d.h. auf den Pixeln des Bildes) schwer Herausfiltern bestimmter Frequenzen Beseitigung störender Details Konvolution, Korrelation Ziel: übertrage Bild in einen Raum, in dem diese Operationen leichter sind z.b. Zerlegung des Bildes in Frequenzen Rückweg muss möglich sein! Verschiedene Möglichkeiten, gleiches Prinzip

58 Motivation (2) Bisher: Darstellung des Bildes im Ortsraum durch den Grauwert an einem bestimmten Ort Jetzt: Darstellung im Frequenzraum durch cos und sin Funktionen verschiedener Frequenzen Ein Bild kann eindeutig und vollständig in beiden Räumen dargestellt werden. LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
59 59 Fouriertransformation: Eigenschaften Transformation: verändert eine Funktion nicht, sondern stellt sie nur anders dar Transformation ist umkehrbar inverse Fouriertransformation Analog zum Basiswechsel in der Vektorrechnung
60 60 Exkurs: Vektorrechnung bilden eine Basis b 1 des R 3 sind paarweise orthogonal haben Länge 1 bilden ebenfalls eine Basis b 2 des R 3 sind ebenfalls paarweise orthogonal Haben ebenfalls Länge 1 Ist orthogonal und normiert (d.h. M T = M -1 ) Ist Basiswechselmatrix von b 1 nach b 2
61 61 Anschaulich: Basisvektoren eines Bildes = 1 * + 0 * + 1 * + 0 * bilden eine Basis des R 4 sind paarweise orthogonal haben Länge 1 Wahl anderer Basisvektoren Transformation mittels Basiswechsel Basiswechselmatrix vom Rang der Pixelanzahl
62 Orthogonale Funktionen Seien f 1 und f 2 Funktionen, die an N Stellen abgetastet sind (also N-dim. Vektoren) f 1 und f 2 sind orthogonal, falls gilt: D.h. das Skalarprodukt der zugehörigen Vektoren ist 0 N paarweise orthogonale Funktionen f 1 f N bilden damit eine orthogonale Basis des N-dim. Raums Transformationen zwischen orthogonalen Basen sind immer umkehrbar LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
63 63 Orthogonale Funktionen
64 Orthogonale Funktionstransformationen Betrachte abgetastete Funktionen wie Vektoren Finde neue geeignete orthogonalen Basis Üblicherweise Basisfunktionen, die eine Bedeutung bzgl. der betrachteten Eigenschaft haben Fourier-Basis: komplexe, periodische Funktionen Kosinusbasis: Kosinusfunktionen Transformiere Bild in diese Basis Betrachte es dort Transformiere zurück LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
65 65 Die Fourierbasis (1) Ausgangspunkt: Bildzeile mit N Pixeln 1. Versuch: wähle Kosinusfunktionen Wobei u 1 u N ganzzahlige Vielfache von u 0 = 2π/N
66 Fourierbasis (2) N=5, u i = 1, u j = 4 = N u i Problem: falls u i = N u j ist, sind die Abtastungen gleich nur N/2 Funktionen verfügbar, keine Basis Siehe auch Shannon-Nyquist Theorem, Aliasing LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS
67 67 Fourierbasis (3)
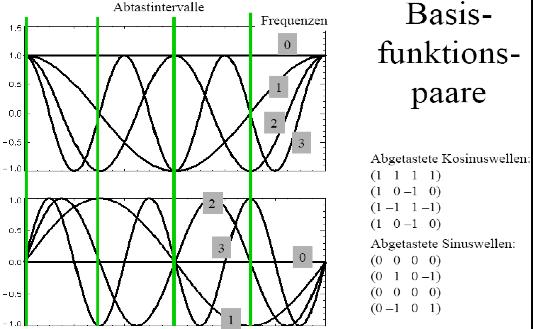
68 68 Basisfunktionspaare
69 69 Erinnerung: komplexe Zahlen Im Bereich der reellen Zahlen gibt es keine Lösung für x² = -1 Einführung der imaginären Zahlen i: Lösung der Gleichung x² = -1 Die Gruppe der reellen und imaginären Zahlen nennt man komplexe Zahlen Komplexe Zahl z: z = a + i*b, wobei a und b reell sind
70 70 Erinnerung: komplexe Zahlen Imaginäre Achse Realteil a r z Imaginärteil i*b Reelle Achse
71 71 Komplexe periodische Funktionen
72 72 Komplexes Skalarprodukt

73 73 Fourierbasis (3) 2. Versuch: wähle komplexe Funktionen Wobei u ein ganzz. Vielf. von u 0 = 2π/N N verschiedene Funktionen Ist eine Basis


74 Belastungen beim Carving Technikanalyse und Kräfte beim Carving Diplomarbeit zur Erlangung des Eidg. Turn- und Sportlehrerdiploms II LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS Die erheblichen Schwingungen erlauben es auch nicht, eindeutige Aussagen bezüglich absoluter Kräfte zu machen. Eine Fourier- Analyse hätte diesbezüglich eine Vereinfachung, [ ] der Diagrammauswertung gegeben.
2D Graphik: Digitalphotographie, Abtastung von Bildern
 LMU München Medieninformatik Butz/Hilliges 2D Graphics WS2005 11.11.2005 Folie 1 2D Graphik: Digitalphotographie, Abtastung von Bildern Vorlesung 2D Graphik Andreas Butz, Otmar Hilliges Freitag, 11. November
LMU München Medieninformatik Butz/Hilliges 2D Graphics WS2005 11.11.2005 Folie 1 2D Graphik: Digitalphotographie, Abtastung von Bildern Vorlesung 2D Graphik Andreas Butz, Otmar Hilliges Freitag, 11. November
Computergrafik 2: Fourier-Transformation
 Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergraphik 1 2. Teil: Bildverarbeitung. Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation
 Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Computergrafik 2: Fourier-Transformation
 Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
2D Graphik: FFT und Anwendungen der Fouriertransformation. Vorlesung 2D Graphik Andreas Butz, Otmar Hilliges Freitag, 25.
 LMU München Medieninformatik Butz/Hilliges D Graphics WS005 5..005 Folie D Graphik: FFT und Anwendungen der Fouriertransformation Vorlesung D Graphik Andreas Butz, Otmar Hilliges Freitag, 5. ovember 005
LMU München Medieninformatik Butz/Hilliges D Graphics WS005 5..005 Folie D Graphik: FFT und Anwendungen der Fouriertransformation Vorlesung D Graphik Andreas Butz, Otmar Hilliges Freitag, 5. ovember 005
Bildpunkt auf dem Gitter: Pixel (picture element) (manchmal auch Pel)
 (manchmal auch Pel)") 4. Digitalisierung und Bildoperationen 4.1 Digitalisierung (Sampling, Abtastung) Rasterung auf 2D-Bildmatrix mathematisch: Abb. einer 2-dim. Bildfunktion mit kontinuierlichem Definitionsbereich auf digitales
4. Digitalisierung und Bildoperationen 4.1 Digitalisierung (Sampling, Abtastung) Rasterung auf 2D-Bildmatrix mathematisch: Abb. einer 2-dim. Bildfunktion mit kontinuierlichem Definitionsbereich auf digitales
Mathematische Erfrischungen III - Vektoren und Matrizen
 Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
Computergrafik 2: Filtern im Frequenzraum
 Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Digitale Bilder & Punktoperationen
 Computergrafik 2: Digitale Bilder & Punktoperationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D.
Computergrafik 2: Digitale Bilder & Punktoperationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D.
Digitale Schwarz-Weiß-Fotografie
 Digitale Schwarz-Weiß-Fotografie Warum Schwarz-Weiß? Zonensystem, Dynamikumfang und Bittiefe Bewusst SW fotografieren Der Kamera-Workflow SW-Umsetzung die falschen Wege SW-Umsetzung die richtien Wege Der
Digitale Schwarz-Weiß-Fotografie Warum Schwarz-Weiß? Zonensystem, Dynamikumfang und Bittiefe Bewusst SW fotografieren Der Kamera-Workflow SW-Umsetzung die falschen Wege SW-Umsetzung die richtien Wege Der
Behandlung von hohen Kontrasten
 Behandlung von hohen Kontrasten Hell und Dunkel richtig einsetzen Günther Keil; Ergebnis Foto-Ecke, 11.September 2012 Schwerpunkte Einführung Bei der Aufnahme Am PC HDR-Software Nächster Termin: 9. Oktober:
Behandlung von hohen Kontrasten Hell und Dunkel richtig einsetzen Günther Keil; Ergebnis Foto-Ecke, 11.September 2012 Schwerpunkte Einführung Bei der Aufnahme Am PC HDR-Software Nächster Termin: 9. Oktober:
Diskretisierung und Quantisierung (Teil 1) Prof. U. Rüde - Algorithmik kontinuierlicher Systeme
 Prof. U. Rüde - Algorithmik kontinuierlicher Systeme") Algorithmik kontinuierlicher Systeme Diskretisierung und Quantisierung (Teil ) Digitalisierung und Quantisierung Motivation Analoge Aufnahme von Sprache, Bildern, Digitale Speicherung durch Diskretisierung
Algorithmik kontinuierlicher Systeme Diskretisierung und Quantisierung (Teil ) Digitalisierung und Quantisierung Motivation Analoge Aufnahme von Sprache, Bildern, Digitale Speicherung durch Diskretisierung
Mathematik, Signale und moderne Kommunikation
 Natur ab 4 - PH Baden Mathematik, Signale und moderne Kommunikation 1 monika.doerfler@univie.ac.at 29.4.2009 1 NuHAG, Universität Wien monika.doerfler@univie.ac.at Mathematik, Signale und moderne Kommunikation
Natur ab 4 - PH Baden Mathematik, Signale und moderne Kommunikation 1 monika.doerfler@univie.ac.at 29.4.2009 1 NuHAG, Universität Wien monika.doerfler@univie.ac.at Mathematik, Signale und moderne Kommunikation
Diagonalisierbarkeit symmetrischer Matrizen
 ¾ Diagonalisierbarkeit symmetrischer Matrizen a) Eigenwerte und Eigenvektoren Die Matrix einer linearen Abbildung ³: Î Î bezüglich einer Basis ( Ò ) ist genau dann eine Diagonalmatrix wenn jeder der Basisvektoren
¾ Diagonalisierbarkeit symmetrischer Matrizen a) Eigenwerte und Eigenvektoren Die Matrix einer linearen Abbildung ³: Î Î bezüglich einer Basis ( Ò ) ist genau dann eine Diagonalmatrix wenn jeder der Basisvektoren
2. Dezember Lineare Algebra II. Christian Ebert & Fritz Hamm. Skalarprodukt, Norm, Metrik. Matrizen. Lineare Abbildungen
 Algebra und Algebra 2. Dezember 2011 Übersicht Algebra und Algebra I Gruppen & Körper Vektorräume, Basis & Dimension Algebra Norm & Metrik Abbildung & Algebra I Eigenwerte, Eigenwertzerlegung Singulärwertzerlegung
Algebra und Algebra 2. Dezember 2011 Übersicht Algebra und Algebra I Gruppen & Körper Vektorräume, Basis & Dimension Algebra Norm & Metrik Abbildung & Algebra I Eigenwerte, Eigenwertzerlegung Singulärwertzerlegung
Computergrafik 2: Filtern im Ortsraum
 Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Diskretisierung und Quantisierung (Teil 1) Prof. U. Rüde - Algorithmik kontinuierlicher Systeme
 Prof. U. Rüde - Algorithmik kontinuierlicher Systeme") Algorithmik kontinuierlicher Systeme Diskretisierung und Quantisierung (Teil ) Digitalisierung und Quantisierung Motivation Analoge Aufnahme von Sprache, Bildern, Digitale Speicherung durch Diskretisierung
Algorithmik kontinuierlicher Systeme Diskretisierung und Quantisierung (Teil ) Digitalisierung und Quantisierung Motivation Analoge Aufnahme von Sprache, Bildern, Digitale Speicherung durch Diskretisierung
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Antialiasing Graphische DV und BV, Regina Pohle, 5. Antialiasing 1 Einordnung in die Inhalte der Vorlesung Einführung mathematische
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Antialiasing Graphische DV und BV, Regina Pohle, 5. Antialiasing 1 Einordnung in die Inhalte der Vorlesung Einführung mathematische
Schnelle Fouriertransformation (FFT)
") Schnelle Fouriertransformation (FFT) Inhaltsverzeichnis 1 Schnelle Fouriertransformation (FFT)... 3 1.1 Das Realtime-Konzept der Goldammer-Messkarten... 3 1.2 Das Abtasttheorem oder Regeln für die Abtastung
Schnelle Fouriertransformation (FFT) Inhaltsverzeichnis 1 Schnelle Fouriertransformation (FFT)... 3 1.1 Das Realtime-Konzept der Goldammer-Messkarten... 3 1.2 Das Abtasttheorem oder Regeln für die Abtastung
Distributed Algorithms. Image and Video Processing
 Chapter 7 High Dynamic Range (HDR) Distributed Algorithms for Quelle: wikipedia.org 2 1 High Dynamic Range bezeichnet ein hohes Kontrastverhältnis in einem Bild Kontrastverhältnis bei digitalem Bild: 1.000:1
Chapter 7 High Dynamic Range (HDR) Distributed Algorithms for Quelle: wikipedia.org 2 1 High Dynamic Range bezeichnet ein hohes Kontrastverhältnis in einem Bild Kontrastverhältnis bei digitalem Bild: 1.000:1
Bildverarbeitung: Fourier-Transformation. D. Schlesinger () BV: Fourier-Transformation 1 / 16
 BV: Fourier-Transformation 1 / 16") Bildverarbeitung: Fourier-Transformation D. Schlesinger () BV: Fourier-Transformation 1 / 16 Allgemeines Bilder sind keine Vektoren. Bilder sind Funktionen x : D C (Menge der Pixel in die Menge der Farbwerte).
Bildverarbeitung: Fourier-Transformation D. Schlesinger () BV: Fourier-Transformation 1 / 16 Allgemeines Bilder sind keine Vektoren. Bilder sind Funktionen x : D C (Menge der Pixel in die Menge der Farbwerte).
2. Digitale Codierung und Übertragung
 2. Digitale Codierung und Übertragung 2.1 Informationstheoretische Grundlagen 2.2 Speicherbedarf und Kompression 2.3 Digitalisierung Ludwig-Maximilians-Universität München Prof. Hußmann Digitale Medien
2. Digitale Codierung und Übertragung 2.1 Informationstheoretische Grundlagen 2.2 Speicherbedarf und Kompression 2.3 Digitalisierung Ludwig-Maximilians-Universität München Prof. Hußmann Digitale Medien
Serie 8: Fakultativer Online-Test
 Prof Norbert Hungerbühler Lineare Algebra I Serie 8: Fakultativer Online-Test ETH Zürich - D-MAVT HS 215 1 Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen Die Nachbesprechung
Prof Norbert Hungerbühler Lineare Algebra I Serie 8: Fakultativer Online-Test ETH Zürich - D-MAVT HS 215 1 Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen Die Nachbesprechung
HDR-Bilder in der Naturfotografie Was ist das? Wozu ist das gut? Wonsheim, 17. November 2007
 HDR-Bilder in der Naturfotografie Was ist das? Wozu ist das gut? Wonsheim, 17. November 2007 Gliederung Einführung was ist HDR? verschiedene Möglichkeiten für DRI Belichtungskombination HDR Diskussion
HDR-Bilder in der Naturfotografie Was ist das? Wozu ist das gut? Wonsheim, 17. November 2007 Gliederung Einführung was ist HDR? verschiedene Möglichkeiten für DRI Belichtungskombination HDR Diskussion
2. Digitale Codierung und Übertragung
 2. Digitale Codierung und Übertragung 2.1 Informationstheoretische Grundlagen 2.2 Speicherbedarf und Kompression 2.3 Digitalisierung Ludwig-Maximilians-Universität München Prof. Hußmann Digitale Medien
2. Digitale Codierung und Übertragung 2.1 Informationstheoretische Grundlagen 2.2 Speicherbedarf und Kompression 2.3 Digitalisierung Ludwig-Maximilians-Universität München Prof. Hußmann Digitale Medien
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Fourier-Transformation Graphische DV und BV, Regina Pohle, 8. Fourier-Transformation 1 Einordnung in die Inhalte der Vorlesung Einführung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Fourier-Transformation Graphische DV und BV, Regina Pohle, 8. Fourier-Transformation 1 Einordnung in die Inhalte der Vorlesung Einführung
Computergrafik 2: Übung 2. Subsampling und Moiré-Effekte, Color Maps und Histogrammlinearisierung
 Computergrafik 2: Übung 2 Subsampling und Moiré-Effekte, Color Maps und Histogrammlinearisierung Inhalt Besprechung von Übung 1 Subsampling und Moiré Effekte Color Maps Histogrammlinearisierung Computergrafik
Computergrafik 2: Übung 2 Subsampling und Moiré-Effekte, Color Maps und Histogrammlinearisierung Inhalt Besprechung von Übung 1 Subsampling und Moiré Effekte Color Maps Histogrammlinearisierung Computergrafik
13. ABBILDUNGEN EUKLIDISCHEN VEKTORRÄUMEN
 13. ABBILDUNGEN in EUKLIDISCHEN VEKTORRÄUMEN 1 Orthogonale Abbildungen im R 2 und R 3. Eine orthogonale Abbildung ist eine lineare Abbildung, die Längen und Orthogonalität erhält. Die zugehörige Matrix
13. ABBILDUNGEN in EUKLIDISCHEN VEKTORRÄUMEN 1 Orthogonale Abbildungen im R 2 und R 3. Eine orthogonale Abbildung ist eine lineare Abbildung, die Längen und Orthogonalität erhält. Die zugehörige Matrix
Lineare Algebra. Mathematik II für Chemiker. Daniel Gerth
 Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
3.3 Das Abtasttheorem
 17 3.3 Das Abtasttheorem In der Praxis kennt man von einer zeitabhängigen Funktion f einem Signal meist nur diskret abgetastete Werte fn, mit festem > und ganzzahligem n. Unter welchen Bedingungen kann
17 3.3 Das Abtasttheorem In der Praxis kennt man von einer zeitabhängigen Funktion f einem Signal meist nur diskret abgetastete Werte fn, mit festem > und ganzzahligem n. Unter welchen Bedingungen kann
Struktur des menschlichen Auges. Bildgebende Verfahren in der Medizin und medizinische Bildverarbeitung Bildverbesserung 2 / 99
 Struktur des menschlichen Auges 2 / 99 Detektoren im Auge Ca. 100 150 Mio. Stäbchen Ca. 1 Mio. Zäpfchen 3 / 99 Zapfen Entlang der Sehachse, im Fokus Tagessehen (Photopisches Sehen) Scharfsehen Farbsehen
Struktur des menschlichen Auges 2 / 99 Detektoren im Auge Ca. 100 150 Mio. Stäbchen Ca. 1 Mio. Zäpfchen 3 / 99 Zapfen Entlang der Sehachse, im Fokus Tagessehen (Photopisches Sehen) Scharfsehen Farbsehen
Diskretisierung und Quantisierung (Teil 1) Prof. U. Rüde - Algorithmik kontinuierlicher Systeme
 Prof. U. Rüde - Algorithmik kontinuierlicher Systeme") Algorithmik kontinuierlicher Systeme Diskretisierung und Quantisierung (Teil ) Digitalisierung und Quantisierung Motivation Analoge Aufnahme von Sprache, Bildern, Digitale Speicherung durch Diskretisierung
Algorithmik kontinuierlicher Systeme Diskretisierung und Quantisierung (Teil ) Digitalisierung und Quantisierung Motivation Analoge Aufnahme von Sprache, Bildern, Digitale Speicherung durch Diskretisierung
Bildverarbeitung. Bildvorverarbeitung - Fourier-Transformation -
 Bildverarbeitung Bildvorverarbeitung - Fourier-Transformation - 1 Themen Methoden Punktoperationen / Lokale Operationen / Globale Operationen Homogene / Inhomogene Operationen Lineare / Nichtlineare Operationen
Bildverarbeitung Bildvorverarbeitung - Fourier-Transformation - 1 Themen Methoden Punktoperationen / Lokale Operationen / Globale Operationen Homogene / Inhomogene Operationen Lineare / Nichtlineare Operationen
Technische Universität München Zentrum Mathematik. Übungsblatt 7
 Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
HM II Tutorium 1. Lucas Kunz. 24. April 2018
 HM II Tutorium 1 Lucas Kunz 24. April 2018 Inhaltsverzeichnis 1 Theorie 2 1.1 Körper...................................... 2 1.2 Gruppen..................................... 2 1.3 Vektorraum...................................
HM II Tutorium 1 Lucas Kunz 24. April 2018 Inhaltsverzeichnis 1 Theorie 2 1.1 Körper...................................... 2 1.2 Gruppen..................................... 2 1.3 Vektorraum...................................
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
Übersicht Kapitel 9. Vektorräume
 Vektorräume Definition und Geometrie von Vektoren Übersicht Kapitel 9 Vektorräume 9.1 Definition und Geometrie von Vektoren 9.2 Teilräume 9.3 Linearkombinationen und Erzeugendensysteme 9.4 Lineare Abhängigkeiten
Vektorräume Definition und Geometrie von Vektoren Übersicht Kapitel 9 Vektorräume 9.1 Definition und Geometrie von Vektoren 9.2 Teilräume 9.3 Linearkombinationen und Erzeugendensysteme 9.4 Lineare Abhängigkeiten
Computergrafik 2: Digitale Bilder & Punktoperationen
 Computergrafik 2: Digitale Bilder & Punktoperationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D.
Computergrafik 2: Digitale Bilder & Punktoperationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D.
Kapitel 6: Matrixrechnung (Kurzeinführung in die Lineare Algebra)
") Kapitel 6: Matrixrechnung (Kurzeinführung in die Lineare Algebra) Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen
Kapitel 6: Matrixrechnung (Kurzeinführung in die Lineare Algebra) Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen
Was bisher geschah. digitale Bilder: Funktion B : pos col Matrix B col pos. Punktoperationen f : col 1 col 2
 Was bisher geschah digitale Bilder: Funktion B : pos col Matrix B col pos statistische Merkmale Punktoperationen f : col 1 col 2 (Bildanalyse) (Farbtransformation) Geometrische Operationen f : pos 1 pos
Was bisher geschah digitale Bilder: Funktion B : pos col Matrix B col pos statistische Merkmale Punktoperationen f : col 1 col 2 (Bildanalyse) (Farbtransformation) Geometrische Operationen f : pos 1 pos
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV, Regina Pohle,. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV, Regina Pohle,. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Signale, Transformationen
 Signale, Transformationen Signal: Funktion s(t), t reell (meist t die Zeit, s eine Messgröße) bzw Zahlenfolge s k = s[k], k ganzzahlig s reell oder komplex s[k] aus s(t): Abtastung mit t = kt s, s[k] =
Signale, Transformationen Signal: Funktion s(t), t reell (meist t die Zeit, s eine Messgröße) bzw Zahlenfolge s k = s[k], k ganzzahlig s reell oder komplex s[k] aus s(t): Abtastung mit t = kt s, s[k] =
3.7 Anti-Alias-Verfahren
 3.7 Anti-Alias-Verfahren Wir hatten Treppeneffekte bereits beim Rastern von Bildern kennengelernt. Aber auch beim Wiederholen verkleinerter Texturen können sich durch Rasterungseffekte unschöne Interferenzerscheinungen
3.7 Anti-Alias-Verfahren Wir hatten Treppeneffekte bereits beim Rastern von Bildern kennengelernt. Aber auch beim Wiederholen verkleinerter Texturen können sich durch Rasterungseffekte unschöne Interferenzerscheinungen
Wiederholungsserie II
 Lineare Algebra II D-MATH, FS 205 Prof. Richard Pink Wiederholungsserie II. Zeige durch Kopfrechnen, dass die folgende reelle Matrix invertierbar ist: 205 2344 234 990 A := 224 423 990 3026 230 204 9095
Lineare Algebra II D-MATH, FS 205 Prof. Richard Pink Wiederholungsserie II. Zeige durch Kopfrechnen, dass die folgende reelle Matrix invertierbar ist: 205 2344 234 990 A := 224 423 990 3026 230 204 9095
Bildkontrolle mit Hilfe des Histogramms
 Bildkontrolle mit Hilfe des Histogramms Mit Hilfe des Kamera-Histogramms lässt sich direkt nach der Aufnahme prüfen ob die Belichtung richtig war oder ob Korrekturen vorgenommen werden müssen. Die meisten
Bildkontrolle mit Hilfe des Histogramms Mit Hilfe des Kamera-Histogramms lässt sich direkt nach der Aufnahme prüfen ob die Belichtung richtig war oder ob Korrekturen vorgenommen werden müssen. Die meisten
Das Zusammenspiel von ISO Blende - Belichtungszeit. Die Belichtung. Michael Lamberty -
 Das Zusammenspiel von ISO Blende - Belichtungszeit Die Belichtung Michael Lamberty - www.mlsb.de Grundlagen Übersicht ISO Belichtungszeit Blende Zerstreuungskreis Beugungsunschärfe Belichtung messen 2
Das Zusammenspiel von ISO Blende - Belichtungszeit Die Belichtung Michael Lamberty - www.mlsb.de Grundlagen Übersicht ISO Belichtungszeit Blende Zerstreuungskreis Beugungsunschärfe Belichtung messen 2
Bild-Erfassung Digitalisierung Abtastung/Quantisierung
 Multimediatechnik / Video Bild-Erfassung Digitalisierung Abtastung/Quantisierung Oliver Lietz Bild-Erfassung Abtastung / Digitalisierung Scanner: Zeilenweise Abtastung mit CCD Digitale Kamera: Flächenweise
Multimediatechnik / Video Bild-Erfassung Digitalisierung Abtastung/Quantisierung Oliver Lietz Bild-Erfassung Abtastung / Digitalisierung Scanner: Zeilenweise Abtastung mit CCD Digitale Kamera: Flächenweise
Serie 8: Online-Test
 D-MAVT Lineare Algebra I HS 017 Prof Dr N Hungerbühler Serie 8: Online-Test Einsendeschluss: Freitag, der 4 November um 14:00 Uhr Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen
D-MAVT Lineare Algebra I HS 017 Prof Dr N Hungerbühler Serie 8: Online-Test Einsendeschluss: Freitag, der 4 November um 14:00 Uhr Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen
Lineare Algebra I 14. Tutorium Lineare Abbildungen und Matrizen
 Lineare Algebra I 4 Tutorium Lineare Abbildungen und Matrizen Fachbereich Mathematik WS / Prof Dr Kollross 7 Februar Dr Le Roux Dipl-Math Susanne Kürsten Aufgaben Aufgabe G (Bewegungen im ) Als Bewegung
Lineare Algebra I 4 Tutorium Lineare Abbildungen und Matrizen Fachbereich Mathematik WS / Prof Dr Kollross 7 Februar Dr Le Roux Dipl-Math Susanne Kürsten Aufgaben Aufgabe G (Bewegungen im ) Als Bewegung
Mathematik für Naturwissenschaftler II SS 2010
 Mathematik für Naturwissenschaftler II SS 2010 Lektion 9 20. Mai 2010 Kapitel 9. Matrizen und Determinanten Der Begriff der Matrix Die transponierte Matrix Definition 84. Unter einer (reellen) m n-matrix
Mathematik für Naturwissenschaftler II SS 2010 Lektion 9 20. Mai 2010 Kapitel 9. Matrizen und Determinanten Der Begriff der Matrix Die transponierte Matrix Definition 84. Unter einer (reellen) m n-matrix
K. Eppler, Inst. f. Num. Mathematik Übungsaufgaben. 11. Übung: Woche vom
 Übungsaufgaben 11. Übung: Woche vom 9. 1.-13. 1. 2017 (Numerik): Heft Ü 1: 12.28.a,b; 12.29.b,c (jeweils mit Fehlerabschätzung); 6.26; 6.27.a (auch mit Lagrange-Interpolationspolynom); 6.25; 6.28 (auch
Übungsaufgaben 11. Übung: Woche vom 9. 1.-13. 1. 2017 (Numerik): Heft Ü 1: 12.28.a,b; 12.29.b,c (jeweils mit Fehlerabschätzung); 6.26; 6.27.a (auch mit Lagrange-Interpolationspolynom); 6.25; 6.28 (auch
Inhalt. Mathematik für Chemiker II Lineare Algebra. Vorlesung im Sommersemester Kurt Frischmuth. Rostock, April Juli 2015
 Inhalt Mathematik für Chemiker II Lineare Algebra Vorlesung im Sommersemester 5 Rostock, April Juli 5 Vektoren und Matrizen Abbildungen 3 Gleichungssysteme 4 Eigenwerte 5 Funktionen mehrerer Variabler
Inhalt Mathematik für Chemiker II Lineare Algebra Vorlesung im Sommersemester 5 Rostock, April Juli 5 Vektoren und Matrizen Abbildungen 3 Gleichungssysteme 4 Eigenwerte 5 Funktionen mehrerer Variabler
4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter
 4 Signalverarbeitung 4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter Weiterführende Literatur (z.b.): Beate Meffert, Olaf Hochmuth: Werkzeuge
4 Signalverarbeitung 4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter Weiterführende Literatur (z.b.): Beate Meffert, Olaf Hochmuth: Werkzeuge
Grundlagen. Histogramme
 Grundlagen e Digitalkameras verfügen über integrierte Belichtungsmesser und zeigen die Verteilung der Tonwerte im Bild als Balkengrafik () an. Das gibt Auskunft über die Anzahl der Pixel im jeweiligen
Grundlagen e Digitalkameras verfügen über integrierte Belichtungsmesser und zeigen die Verteilung der Tonwerte im Bild als Balkengrafik () an. Das gibt Auskunft über die Anzahl der Pixel im jeweiligen
L5 Matrizen I: Allgemeine Theorie
 L5 Matrizen I: Allgemeine Theorie Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen - Beschreibung von Lorenz-Transformationen
L5 Matrizen I: Allgemeine Theorie Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen - Beschreibung von Lorenz-Transformationen
Lineare Algebra: Determinanten und Eigenwerte
 : und Eigenwerte 16. Dezember 2011 der Ordnung 2 I Im Folgenden: quadratische Matrizen Sei ( a b A = c d eine 2 2-Matrix. Die Determinante D(A (bzw. det(a oder Det(A von A ist gleich ad bc. Det(A = a b
: und Eigenwerte 16. Dezember 2011 der Ordnung 2 I Im Folgenden: quadratische Matrizen Sei ( a b A = c d eine 2 2-Matrix. Die Determinante D(A (bzw. det(a oder Det(A von A ist gleich ad bc. Det(A = a b
Crash-Kurs Komplexe Zahlen
 1 Definitionen: j, C, z Im Körper R der reellen Zahlen besitzt die lineare Gleichung ax + b = 0 (a, bεr; a 0) stets eine Lösung. Die quadratische Gleichung ax 2 + bx + c = 0 führt zu der Lösungsformel
1 Definitionen: j, C, z Im Körper R der reellen Zahlen besitzt die lineare Gleichung ax + b = 0 (a, bεr; a 0) stets eine Lösung. Die quadratische Gleichung ax 2 + bx + c = 0 führt zu der Lösungsformel
Mathematischer Vorkurs für Physiker WS 2012/13: Vorlesung 1
 TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13: Vorlesung 1 Komplexe Zahlen Das Auffinden aller Nullstellen von algebraischen Gleichungen ist ein Grundproblem, das in der Physik
TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13: Vorlesung 1 Komplexe Zahlen Das Auffinden aller Nullstellen von algebraischen Gleichungen ist ein Grundproblem, das in der Physik
Lösungen zur Prüfung Lineare Algebra I/II für D-MAVT
 Prof. N. Hungerbühler ETH Zürich, Winter 6 Lösungen zur Prüfung Lineare Algebra I/II für D-MAVT. Hinweise zur Bewertung: Jede Aussage ist entweder wahr oder falsch; machen Sie ein Kreuzchen in das entsprechende
Prof. N. Hungerbühler ETH Zürich, Winter 6 Lösungen zur Prüfung Lineare Algebra I/II für D-MAVT. Hinweise zur Bewertung: Jede Aussage ist entweder wahr oder falsch; machen Sie ein Kreuzchen in das entsprechende
Matrizen. a12 a1. a11. a1n a 21. a 2 j. a 22. a 2n. A = (a i j ) (m, n) = i te Zeile. a i 1. a i 2. a i n. a i j. a m1 a m 2 a m j a m n] j te Spalte
![Matrizen. a12 a1. a11. a1n a 21. a 2 j. a 22. a 2n. A = (a i j ) (m, n) = i te Zeile. a i 1. a i 2. a i n. a i j. a m1 a m 2 a m j a m n] j te Spalte](/thumbs/71/64996309.jpg "Matrizen. a12 a1. a11. a1n a 21. a 2 j. a 22. a 2n. A = (a i j ) (m, n) = i te Zeile. a i 1. a i 2. a i n. a i j. a m1 a m 2 a m j a m n] j te Spalte") Mathematik I Matrizen In diesem Kapitel werden wir lernen was Matrizen sind und wie man mit Matrizen rechnet. Matrizen ermöglichen eine kompakte Darstellungsform vieler mathematischer Strukturen. Zum Darstellung
Mathematik I Matrizen In diesem Kapitel werden wir lernen was Matrizen sind und wie man mit Matrizen rechnet. Matrizen ermöglichen eine kompakte Darstellungsform vieler mathematischer Strukturen. Zum Darstellung
Parseval-Identität: Seien zwei Funktionen v. mit Fourier-Reihen: dann gilt: Parseval-Identität. Speziell:
 Parseval-Identität: Seien zwei Funktionen v. mit Fourier-Reihen: dann gilt: (kühnes Vertauschen von Integral und Summe!) Parseval-Identität Speziell: Anmerkung: beide Seiten kann man als Skalarprodukt
Parseval-Identität: Seien zwei Funktionen v. mit Fourier-Reihen: dann gilt: (kühnes Vertauschen von Integral und Summe!) Parseval-Identität Speziell: Anmerkung: beide Seiten kann man als Skalarprodukt
10.2 Linearkombinationen
 147 Vektorräume in R 3 Die Vektorräume in R 3 sind { } Geraden durch den Ursprung Ebenen durch den Ursprung R 3 Analog zu reellen Vektorräumen kann man komplexe Vektorräume definieren. In der Definition
147 Vektorräume in R 3 Die Vektorräume in R 3 sind { } Geraden durch den Ursprung Ebenen durch den Ursprung R 3 Analog zu reellen Vektorräumen kann man komplexe Vektorräume definieren. In der Definition
Landschaftsfotografie. Jenny Ivanova,
 Landschaftsfotografie Jenny Ivanova, 12.11.2010 2 Ansel Adams, Moonrise, Hernandez, New Mexico, 1941 Inspiration Solange eine Landschaft nicht geheimnisvoll wirkt, ist sie nicht besser als eine Postkarte.
Landschaftsfotografie Jenny Ivanova, 12.11.2010 2 Ansel Adams, Moonrise, Hernandez, New Mexico, 1941 Inspiration Solange eine Landschaft nicht geheimnisvoll wirkt, ist sie nicht besser als eine Postkarte.
Fortgeschrittene Mathematik Raum und Funktionen
 Fortgeschrittene Mathematik Raum und Funktionen Thomas Zehrt Universität Basel WWZ Thomas Zehrt (Universität Basel WWZ) R n und Funktionen 1 / 33 Outline 1 Der n-dimensionale Raum 2 R 2 und die komplexen
Fortgeschrittene Mathematik Raum und Funktionen Thomas Zehrt Universität Basel WWZ Thomas Zehrt (Universität Basel WWZ) R n und Funktionen 1 / 33 Outline 1 Der n-dimensionale Raum 2 R 2 und die komplexen
Vektoren - Die Basis
 Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Verlustbehaftete Kompression. JPEG: Joint Photographic Experts Group
 Verlustbehaftete Kompression JPEG: Joint Photographic Experts Group ITU T8.1 definiert Zusammenarbeit von ITU, IEC, ISO Verfahren zur verlustbehafteten Bildkodierung (auch Verlustloser Modus vorhanden)
Verlustbehaftete Kompression JPEG: Joint Photographic Experts Group ITU T8.1 definiert Zusammenarbeit von ITU, IEC, ISO Verfahren zur verlustbehafteten Bildkodierung (auch Verlustloser Modus vorhanden)
Computergrafik 2: Filtern im Ortsraum
 Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
8.2 Invertierbare Matrizen
 38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
Wichtige Kenntnisse der Linearen Algebra
 Wichtige Kenntnisse der Linearen Algebra In Kapitel 3 der Vorlesung werden wir sehen (und in Kapitel 6 vertiefen, dass zur Beschreibung von Quantensystemen mathematische Begriffe aus dem Gebiet der Linearen
Wichtige Kenntnisse der Linearen Algebra In Kapitel 3 der Vorlesung werden wir sehen (und in Kapitel 6 vertiefen, dass zur Beschreibung von Quantensystemen mathematische Begriffe aus dem Gebiet der Linearen
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Lineare Algebra und Numerische Mathematik für D-BAUG
 P Grohs T Welti F Weber Herbstsemester 215 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 12 Aufgabe 121 Matrixpotenzen und Eigenwerte Diese Aufgabe ist
P Grohs T Welti F Weber Herbstsemester 215 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 12 Aufgabe 121 Matrixpotenzen und Eigenwerte Diese Aufgabe ist
Digitale Bildverarbeitung Einheit 7 Bildarithmetik
 Digitale Bildverarbeitung Einheit 7 Bildarithmetik Lehrauftrag SS 2007 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einsehen, dass man mit
Digitale Bildverarbeitung Einheit 7 Bildarithmetik Lehrauftrag SS 2007 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einsehen, dass man mit
Digitale Bildverarbeitung Einheit 7 Bildarithmetik
 Digitale Bildverarbeitung Einheit 7 Bildarithmetik Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einsehen, dass man mit
Digitale Bildverarbeitung Einheit 7 Bildarithmetik Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einsehen, dass man mit
Ausgewählte Lösungen zu den Übungsblättern 4-5
 Fakultät für Luft- und Raumfahrttechnik Institut für Mathematik und Rechneranwendung Vorlesung: Lineare Algebra (ME), Prof. Dr. J. Gwinner Ausgewählte en zu den Übungsblättern -5 Aufgabe, Lineare Unabhängigkeit
Fakultät für Luft- und Raumfahrttechnik Institut für Mathematik und Rechneranwendung Vorlesung: Lineare Algebra (ME), Prof. Dr. J. Gwinner Ausgewählte en zu den Übungsblättern -5 Aufgabe, Lineare Unabhängigkeit
L5 Matrizen I. Matrix: (Plural: Matrizen)
") L5 Matrizen I Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen - Beschreibung von Lorenz-Transformationen (spezielle
L5 Matrizen I Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen - Beschreibung von Lorenz-Transformationen (spezielle
Lineare Algebra und Numerische Mathematik für D-BAUG
 P Grohs T Welti F Weber Herbstsemester 25 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 8 Aufgabe 8 Basen für Bild und Kern Gegeben sind die beiden 2 Matrizen:
P Grohs T Welti F Weber Herbstsemester 25 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 8 Aufgabe 8 Basen für Bild und Kern Gegeben sind die beiden 2 Matrizen:
- Sei r(x,y) Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.
 Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.") Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Lineare Algebra. 9. Übungsstunde. Steven Battilana.
 Lineare Algebra 9. Übungsstunde Steven Battilana stevenb@student.ethz.ch November 2, 26 Erinnerung Sei x, y 2 E n, 2 E, danngilt: hx, yi = kxkkyk cos( ). Ist m eine beliebige natürliche Zahl, apple i,
Lineare Algebra 9. Übungsstunde Steven Battilana stevenb@student.ethz.ch November 2, 26 Erinnerung Sei x, y 2 E n, 2 E, danngilt: hx, yi = kxkkyk cos( ). Ist m eine beliebige natürliche Zahl, apple i,
NikoN ProfessioNal-Dslr
 Dré de Man NikoN ProfessioNal-Dslr Fotografieren auf Profi-Niveau 3.4 Zonensystem und DRE Sie werden sehen, dass die Nikons dazu neigen, Mittelgrau etwas heller zu machen. Im Allgemeinen ist das auch besser,
Dré de Man NikoN ProfessioNal-Dslr Fotografieren auf Profi-Niveau 3.4 Zonensystem und DRE Sie werden sehen, dass die Nikons dazu neigen, Mittelgrau etwas heller zu machen. Im Allgemeinen ist das auch besser,
Musterlösungen Blatt Mathematischer Vorkurs. Sommersemester Dr. O. Zobay. Matrizen
 Musterlösungen Blatt 8 34007 Mathematischer Vorkurs Sommersemester 007 Dr O Zobay Matrizen Welche Matrixprodukte können mit den folgenden Matrizen gebildet werden? ( 4 5 A, B ( 0 9 7, C 8 0 5 4 Wir können
Musterlösungen Blatt 8 34007 Mathematischer Vorkurs Sommersemester 007 Dr O Zobay Matrizen Welche Matrixprodukte können mit den folgenden Matrizen gebildet werden? ( 4 5 A, B ( 0 9 7, C 8 0 5 4 Wir können
7.2 Die adjungierte Abbildung
 7.2 Die adjungierte Abbildung Definition 7.2.1 Eine lineare Abbildung f : V K heißt lineares Funktional oder Linearform. (Diese Definition gilt für beliebige K-Vektorräume, nicht nur für innere Produkträume.)
7.2 Die adjungierte Abbildung Definition 7.2.1 Eine lineare Abbildung f : V K heißt lineares Funktional oder Linearform. (Diese Definition gilt für beliebige K-Vektorräume, nicht nur für innere Produkträume.)
Hilfsblätter Lineare Algebra
 Hilfsblätter Lineare Algebra Sebastian Suchanek unter Mithilfe von Klaus Flittner Matthias Staab c 2002 by Sebastian Suchanek Printed with L A TEX Inhaltsverzeichnis 1 Vektoren 1 11 Norm 1 12 Addition,
Hilfsblätter Lineare Algebra Sebastian Suchanek unter Mithilfe von Klaus Flittner Matthias Staab c 2002 by Sebastian Suchanek Printed with L A TEX Inhaltsverzeichnis 1 Vektoren 1 11 Norm 1 12 Addition,
7 Lineare Abbildungen und Skalarprodukt
 Mathematik II für inf/swt, Sommersemester 22, Seite 121 7 Lineare Abbildungen und Skalarprodukt 71 Vorbemerkungen Standard Skalarprodukt siehe Kap 21, Skalarprodukt abstrakt siehe Kap 34 Norm u 2 u, u
Mathematik II für inf/swt, Sommersemester 22, Seite 121 7 Lineare Abbildungen und Skalarprodukt 71 Vorbemerkungen Standard Skalarprodukt siehe Kap 21, Skalarprodukt abstrakt siehe Kap 34 Norm u 2 u, u
Kapitel 3 Lineare Algebra
 Kapitel 3 Lineare Algebra Inhaltsverzeichnis VEKTOREN... 3 VEKTORRÄUME... 3 LINEARE UNABHÄNGIGKEIT UND BASEN... 4 MATRIZEN... 6 RECHNEN MIT MATRIZEN... 6 INVERTIERBARE MATRIZEN... 6 RANG EINER MATRIX UND
Kapitel 3 Lineare Algebra Inhaltsverzeichnis VEKTOREN... 3 VEKTORRÄUME... 3 LINEARE UNABHÄNGIGKEIT UND BASEN... 4 MATRIZEN... 6 RECHNEN MIT MATRIZEN... 6 INVERTIERBARE MATRIZEN... 6 RANG EINER MATRIX UND
C A R L V O N O S S I E T Z K Y. Transformationen. Johannes Diemke. Übung im Modul OpenGL mit Java Wintersemester 2010/2011
 C A R L V O N O S S I E T Z K Y Transformationen Johannes Diemke Übung im Modul OpenGL mit Java Wintersemester 2010/2011 Motivation Transformationen Sind Grundlage vieler Verfahren der Computergrafik Model-
C A R L V O N O S S I E T Z K Y Transformationen Johannes Diemke Übung im Modul OpenGL mit Java Wintersemester 2010/2011 Motivation Transformationen Sind Grundlage vieler Verfahren der Computergrafik Model-
Beispiele 1. Gegeben sei das lineare Gleichungssystem mit erweiterter Matrix (A
 133 e 1. Gegeben sei das lineare Gleichungssystem mit erweiterter Matrix 1 3 2 1 1 2 3 0. 1 3 2 1 2. Gegeben sei das lineare Gleichungssystem mit erweiterter Matrix 1 3 2 1 1 2 3 0. 1 3 2 1 Schritte des
133 e 1. Gegeben sei das lineare Gleichungssystem mit erweiterter Matrix 1 3 2 1 1 2 3 0. 1 3 2 1 2. Gegeben sei das lineare Gleichungssystem mit erweiterter Matrix 1 3 2 1 1 2 3 0. 1 3 2 1 Schritte des
Lineare Gleichungssysteme
 Kapitel 6 Lineare Gleichungssysteme 6. Gaußalgorithmus Aufgabe 6. : Untersuchen Sie die folgenden linearen Gleichungssysteme mit dem Gaußalgorithmus auf Lösbarkeit und bestimmen Sie jeweils die Lösungsmenge.
Kapitel 6 Lineare Gleichungssysteme 6. Gaußalgorithmus Aufgabe 6. : Untersuchen Sie die folgenden linearen Gleichungssysteme mit dem Gaußalgorithmus auf Lösbarkeit und bestimmen Sie jeweils die Lösungsmenge.
Lineare Algebra 1. Roger Burkhardt
 Lineare Algebra 1 Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft HS 2008/09 4 Einführung Vektoren und Translationen
Lineare Algebra 1 Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft HS 2008/09 4 Einführung Vektoren und Translationen
BC 1.2 Mathematik WS 2016/17. BC 1.2 Mathematik Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra. b 2
 Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra 1 Vektoralgebra 1 Der dreidimensionale Vektorraum R 3 ist die Gesamtheit aller geordneten Tripel (x 1, x 2, x 3 ) reeller Zahlen Jedes geordnete
Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra 1 Vektoralgebra 1 Der dreidimensionale Vektorraum R 3 ist die Gesamtheit aller geordneten Tripel (x 1, x 2, x 3 ) reeller Zahlen Jedes geordnete
YOUNG SCIENTISTS. 4 dimensionale komplexe Zahlen in der Computergrafik. Bastian Weiß 19. Mai 2017 INSTITUT FÜR ANGEWANDTE GEOMETRIE
 YOUNG SCIENTISTS 4 dimensionale komplexe in der Computergrafik Bastian Weiß 19. Mai 2017 INSTITUT FÜR ANGEWANDTE GEOMETRIE Programm Vorbereitung (Wiederholung) Komplexe Vektoren Quaternionen Quaternionen
YOUNG SCIENTISTS 4 dimensionale komplexe in der Computergrafik Bastian Weiß 19. Mai 2017 INSTITUT FÜR ANGEWANDTE GEOMETRIE Programm Vorbereitung (Wiederholung) Komplexe Vektoren Quaternionen Quaternionen
Vektoren. Jörn Loviscach. Versionsstand: 11. April 2009, 23:42
 Vektoren Jörn Loviscach Versionsstand:. April 29, 23:42 Rechnen mit Pfeilen Bei den komplexen Zahlen haben wir das Rechnen mit Pfeilen schon kennen gelernt. Addition und Subtraktion klappen in drei wie
Vektoren Jörn Loviscach Versionsstand:. April 29, 23:42 Rechnen mit Pfeilen Bei den komplexen Zahlen haben wir das Rechnen mit Pfeilen schon kennen gelernt. Addition und Subtraktion klappen in drei wie
Computergraphik I. Das Abtasttheorem. Problem bei räumlicher Abtastung: Oliver Deussen Abtasttheorem 1
 Das Abtasttheorem Problem bei räumlicher Abtastung: Oliver Deussen Abtasttheorem 1 Problem bei zeitlicher Abtastung: Oliver Deussen Abtasttheorem 2 Darstellung auf Monitor Was geschieht eigentlich, wenn
Das Abtasttheorem Problem bei räumlicher Abtastung: Oliver Deussen Abtasttheorem 1 Problem bei zeitlicher Abtastung: Oliver Deussen Abtasttheorem 2 Darstellung auf Monitor Was geschieht eigentlich, wenn
Universität Stuttgart Physik und ihre Didaktik PD Dr. Holger Cartarius. Matrizen. a 1,1 a 1,2 a 1,n a 2,1 a 2,2 a 2,n A = a m,1 a m,2 a m,n
 Universität Stuttgart Physik und ihre Didaktik PD Dr Holger Cartarius Matrizen Matrizen: Ein rechteckiges Zahlenschema der Form a 1,1 a 1,2 a 1,n a 2,1 a 2,2 a 2,n A a m,1 a m,2 a m,n (a) nennt man eine
Universität Stuttgart Physik und ihre Didaktik PD Dr Holger Cartarius Matrizen Matrizen: Ein rechteckiges Zahlenschema der Form a 1,1 a 1,2 a 1,n a 2,1 a 2,2 a 2,n A a m,1 a m,2 a m,n (a) nennt man eine
Wichtigste Voraussetzung für die in dieser Vorlesung beschriebenen Systeme und Verfahren sind digitale Aufnahmen. Doch was ist eigentlich ein
 1 Wichtigste Voraussetzung für die in dieser Vorlesung beschriebenen Systeme und Verfahren sind digitale Aufnahmen. Doch was ist eigentlich ein digitales Foto oder Video? Das folgende Kapitel soll einen
1 Wichtigste Voraussetzung für die in dieser Vorlesung beschriebenen Systeme und Verfahren sind digitale Aufnahmen. Doch was ist eigentlich ein digitales Foto oder Video? Das folgende Kapitel soll einen
4.1. Vektorräume und lineare Abbildungen
 4.1. Vektorräume und lineare Abbildungen Mengen von Abbildungen Für beliebige Mengen X und Y bezeichnet Y X die Menge aller Abbildungen von X nach Y (Reihenfolge beachten!) Die Bezeichnungsweise erklärt
4.1. Vektorräume und lineare Abbildungen Mengen von Abbildungen Für beliebige Mengen X und Y bezeichnet Y X die Menge aller Abbildungen von X nach Y (Reihenfolge beachten!) Die Bezeichnungsweise erklärt
Motivation. Diskretisierung. Überblick. Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen. Diskretisierung und Quantisierung
 Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen Motivation Analoge Aufnahme von Sprache, Bildern Digitale Speicherung durch Diskretisierung + Quantisierung Informationsverlust
Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen Motivation Analoge Aufnahme von Sprache, Bildern Digitale Speicherung durch Diskretisierung + Quantisierung Informationsverlust