G R G S. Vorlesung 11. Xd(s) W(s) Y(s) Reglerentwurfsverfahren. Zur Auswahl von Reglertyp und Reglerparameter. Typ? Parameter?
|
|
|
- Albert Hofer
- vor 7 Jahren
- Abrufe
Transkript
1 Zur Auswahl von Reglertyp und Reglerparameter W(s) - Xd(s) Regler G R trecke G Y(s) Typ? Parameter? 1
2 1. Typauswahl (P, PI, PD, PID???? ) A) nach Tabellen (Faustformel mit welcher Reglertyp zu welcher trecke ) B) nach analytisch hergeleiteten Gesichtspunkten (z.b. strukturoptimaler Regler = Kompensationsreglerverfahren) Das bedeutet, aus einem selbstgesteckten Ziel (Regelverhalten) wird analytisch der notwendige Regler berechnet! 2
3 Typauswahl: A) Tabelle Vorlesung 11 vorliegende trecke idealer Regler eine Verzögerung PI-Regler PT1-Glied zwei Verzögerungen (schwingfähig) PT2 -Glied Integrierend PID-Regler P-Regler I-Glied zweifach integrierend Doppel I-Glied Integrierend und Verzögernd I +PT1 PD-Regler PD-Regler 3
4 Typauswahl: B) Kompensationsreglerverfahren PT1-trecke TN K pr = G trecke K ( ) = 1 + T P PT2-trecke Kpr = G trecke K ( ) = 1 + 2D T PT1*I-trecke G trecke 1 ( ) = 1 + T I-trecke Gtrecke ) = K P + T K I 2 2 T RK Kps T n = T s TN T Kps RK T n = 2 *D s * T s Ts TV = 2 * D s PI-Regler G PI Re gler ( ) = K PID-Regler G PID Re gler ( ) = K PR PR 1 + T T N N 1+ TN + TNTV T 1 KPR KIsTRK T v = T s G ( ) = K (1 T ) K PR = PD-Regler 1 K T I RK Re gler PR + = P-Regler G ( ) = K I Re gler PR ( N D 2 4
5 2. Parametereinstellverfahren Vorlesung 11 A) Durch Probieren vor Ort, wenn eine gutmütige Regelstrecke vorliegt. B) Erst Identifikation der Regelstrecke mittels prungantwort => P, PT1, PT2, I, DT1 + Parameterwerte K P, T, D dann a) analytische Berechnung der Parameter nach gewünschter Vorgabe (Kompensationsreglerentwurf) b) imulation des Regelkreis und Einstellung durch Probieren (imulationstechnischer Entwurf). c) Anwendung von tabellarischen und empirischen Einstellregeln (Einstellregeln nach Kuhn und nach CHR) 5

6 2. Parametereinstellverfahren: A) Probieren vor Ort Einstellung mit chraubenzieher am chaltschrank mit gleichzeitigem Testen des Regelkreisverhaltens. Ablauf am Beispiel PT2 Regelstrecke Kugelwippe WINFACT 6

7 2. Parametereinstellverfahren: A) Probieren vor Ort 1. P-Anteil erhöhen, bis Dauerschwingung 2. D-Anteil ein, um zu dämpfen. T v nach chwingungsdauer Vorlesung I einschalten und so einstellen, dass schnell ausgeregelt und kein starkes Nachschwingen 7
 s = 2 2 Dämpfer d ollwertgeber Regler Dreh- Magnet Feder c Masse m lm lf ld Winkelsensor")
8 2. Parametereinstellverfahren: B) mit identifizierter Regelstrecke ystem FederPendel G Kp 1+ 2DT + T () s = 2 2 Dämpfer d ollwertgeber Regler Dreh- Magnet Feder c Masse m lm lf ld Winkelsensor 8
9 2. Parametereinstellverfahren: B) mit identifizierter Regelstrecke a) Kompensationsreglerverfahren PT1-trecke K pr = G trecke K P ( ) = 1 + T PT2-trecke Kpr = G trecke K P ( ) = 1 + 2D T + T PT1*I-trecke G trecke 1 K I ( ) = 1 + T I-trecke Gtrecke ) = K I 2 2 PI-Regler TN TRKKps T n = T s 1 + TN GPI Re gler( ) = K PR TN TN PID-Regler TRKKps 2 T n = 2 *D s * T s 1+ TN + TNTV GPID Re gler ( ) = K PR Ts TN TV = 2 * Ds 1 KPR = PD-Regler K IsTRK T v = T s G ( ) = K (1 T ) K PR 1 K T = P-Regler I RK Re gler PR + D G ( ) = K Re gler PR ( G T K Kp = DT + T = 0.08sec D = 0.1 () s P = 1 2 G T PID Re gler N ( ) = K = 0.016sec T V PR = 1+ T N 0.4sec + T T N K PR N T V = 1 9 2

 imulation")

10 2. Parametereinstellverfahren: B) mit identifizierter Regelstrecke b) imulation des Regelkreis und Einstellung durch Probieren G Kp 1+ 2DT + T () s = 2 2 WINFACT 10
 imulation des Regelkreis und Einstellung durch")
11 2. Parametereinstellverfahren: B) mit identifizierter Regelstrecke b) imulation des Regelkreis und Einstellung durch Probieren 11
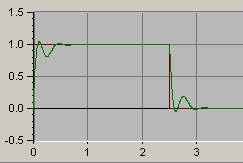

12 2. Parametereinstellverfahren: B) mit identifizierter Regelstrecke Ergebnis: 12
 Reglertyp Einstellregeln Einstellwerte mehrere Möglichkeiten")
13 2. Parametereinstellverfahren: B) mit identifizierter Regelstrecke c) Anwendung von tabellarischen und empirischen Einstellregeln (Einstellregeln nach Kuhn und nach CHR) Reglertyp Einstellregeln Einstellwerte mehrere Möglichkeiten 13
14 A) Einstellregeln nach Kuhn für träge, gut gedämpfte Regelstrecken. Idee: Fehlerfläche 14
15 A) Einstellregeln nach Kuhn Vorlesung 11 Idee: Fehlerfläche = T Σ X a X a Re chteck : messbar Fehlerfläche T Σ 15
16 A) Einstellregeln nach Kuhn Vorlesung 11 Regler Parameter K pr T n T d P 1/K - - PD 1/K T Σ PI 0.5/K 0.5 T Σ - PID 1/K 0.66 T Σ T Σ 16
17 A) Einstellregeln nach Kuhn BEIPIEL Vorlesung 11 =>K pr =1.6 Kuhn-PID: Kpr=1/1.6=0.66 Tn=0.66*T Σ =1.8sec Tv=0.167*T Σ =0.45sec =>T Σ =2,8sec 17
18 A) Einstellregeln nach Kuhn BEIPIEL Kuhn-PID: Kpr=1/1.6=0.66 Tn=0.66 T Σ =1.8sec Tv=0.167 T Σ =0.45sec 18
19 A) Kompensationsregler (als Vergleich) Vorlesung 11 Komp-PID: Kpr=1/1.6=0.66 T g =3.6sec Tn= 2DTs=2.6 sec Tv= Ts/2D=0.65 sec =>Ts=1.3, =>D=1 19

20 A) Kompensationsregler zum Vergleich Komp-PID: Kpr=1/1.6=0.66 Tn= 2DT=2.6 sec Kpr=1 Tv= T/2D=0.65 sec Kpr=

21 B) Einstellregeln nach CHR trecken mit Ausgleich 21
22 B) Einstellregeln nach CHR trecken mit Ausgleich Regler PI PID Führungsregelung Tg K pr = 1.6K T T n K pr = T g ps Tg = 1.05K Tn = 135. T T = u v T u ps u T u 22


23 B) CHR PID-Regler CHR-PID: T g =3.6sec K pr =T g /1.05T u K ps =2.38sec T n = 1.35T u =1.21 sec T u =0.9sec T v = 0.47T u = 0.42 sec 23

24 CHR PID-Regler CHR-PID: K pr =T g /1.05T u K ps =2.38sec T n = 1.35T u =1.21 sec T v = 0.47T u = 0.42 sec 24

25 B) Einstellregeln nach CHR trecken ohne Ausgleich 25
26 B) Einstellregeln nach CHR trecken ohne Ausgleich Regler P Führungsregelung TI 1 Kpr = 0.48 Xe/ Xa= 0.48 T T K s I 26
27 D 1. Übung: Reglerentwurf nach Kuhn Entwerfen ie für die Regelstrecke nach gegebener prungantwort mit der T Σ -Regel einen PID-Regler! Geben ie zunächst K PR und T Σ an! 27

28 D 2. Übung: Reglerentwurf nach CHR für P-trecken Entwerfen ie für die Regelstrecke nach gegebener prungantwort mit der CHR-Methode einen PID-Regler für Führung und 20% Überschwingen! Geben ie zunächst K PR und T u und T g an! 28

29 D 3. Übung: Reglerentwurf nach CHR für I-trecken Entwerfen ie für die Regelstrecke nach gegebener prungantwort mit der CHR-Methode einen P-Regler! Geben ie zunächst K I und T an! 29

30 1. Übung: Vorlesung 11 Lösung Kuhn: K Ps =2 und T Σ =10sec; Kpr=0,5, Tn=6,67sec, Tv=1,67sec, Tvz=0,167sec Regelergebnis: 30

31 2. Übung: Lösung CHR: K Ps =2 und T u =2,5sec, Tg=12,5s; Kpr=2,38, Tn=16,9sec, Tv=1,18sec, Tvz=0,12sec Regelergebnis: 31

32 3. Übung: Lösung CHR I-ystem: K I =0,1 1/s und T =5sec; Kpr=0,96, Regelergebnis: 32
33 Anmerkungen zum Aufbau von Regelkreisen im Laborversuch: W(s) - Xd(s) Regler G R U() trecke G Y(s) 33
34 1. ollwertbereich finden Vorlesung 11 W(s) - Xd(s) Regler G R U() trecke G Wertebereich Y(s) 34
35 1. Teststruktur mit Drehgeber für treckeneingang und Anzeige für Regelgrössenausgang 35
36 1. Aufzeichnung tellbereich ( ) und sich ergebendem Regelgrössenbereich Proportionalität zw. Ein- und Ausgang! 36
37 1. Aufzeichnung tellbereich und Regelgrössenbereich Wertebereich der Regelgrösse von 18 bis

38 1. ollwertgeber z.b. als Drehgeber mit 18/-15 einstellen ollwert ollwert 38
39 2. tellbereich des Reglers finden: W(s) - Xd(s) Regler G R U() trecke G Y(s) 39

40 2. Gleiche Teststruktur Vorlesung 11 40

41 2. Aufzeichnung tellbereich und Regelgrössenbereich Proportionaler Wertebereich der tellgrösse von 6 bis -5 41

42 2. Im Regler auf die Werte 6 / -5 begrenzen 42
43 3. Rückkopplung ermöglichen: W(s) - Xd(s) Regler G R U() trecke G Y(s) 43

44 3. truktur zeichnen: Vorlesung 11 Minuszeichen nicht vergessen 44


45 3. imulationsstart: Fehlermeldung Algebraische chleife 45
46 3. Eine Algebraische chleife kann nicht simuliert werden Problem: Eine Algebraische chleife enthält nur algebraische Funktionsblöcke (brauchen Eingangswert, bevor Ausgangswert berechnet werden kann) Die imulationsorganisation findet keinen tartblock auch der Messblock zählt zu den algebraischen Blöcken 46
47 3. Eine Algebraische chleife kann nicht simuliert werden Abhilfe: Abhilfe durch einen dynamischen Block (I, PT1, PT2, DT1..), alle diese Blöcke haben Anfangswerte, mit denen die imulationsorganisation starten kann aber: obige Blöcke würden den Regelkreis verfälschen Kniff: Einschrittverzögerung(UNITDELAY oder Z -1 ) speichert nur einen Zeitschritt zwischen (stört nicht), aber Anfangswert 47

48 3. truktur: 48

49 3. Einstellung ist wichtig: Vorlesung 11 49
G R. Vorlesung 9. Identifiziert durch Sprungantwort. Sinnvoll selbst gestalten. Regler. Einschleifiger Regelkreis: Xd(s) W(s) Y(s) U(s) GFeder S
 W(s) Y(s) U(s) GFeder S") Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Vorlesung 10. Reglerentwurf nach Kompensationsverfahren Letzte Folie Regelverhalten: Vorgabe für Führungsverhalten
 Vorlesung 0 Reglerentwurf nach ompensationsverfahren Letzte Folie Regelverhalten: Vorgabe für Führungsverhalten Wie? Lösung: Vorlesung 0 Reglerentwurf nach ompensationsverfahren Die oilettenspülung 2 kizze:
Vorlesung 0 Reglerentwurf nach ompensationsverfahren Letzte Folie Regelverhalten: Vorgabe für Führungsverhalten Wie? Lösung: Vorlesung 0 Reglerentwurf nach ompensationsverfahren Die oilettenspülung 2 kizze:
Vorlesung 6. Übertragungsfunktion der linearen Regelkreisglieder Textuell: FederPendel. DGL: als Sprungantwort
 Textuell: FederPendel yste FederPendel Dreh- Magnet Feder c Masse l Däpfer d lf ld ollwertgeber Regler Winkelsensor Regelungstechnische Begriffe: PT-Glied it Verstärkung Kp, Däpfung D, Zeitkonstante T
Textuell: FederPendel yste FederPendel Dreh- Magnet Feder c Masse l Däpfer d lf ld ollwertgeber Regler Winkelsensor Regelungstechnische Begriffe: PT-Glied it Verstärkung Kp, Däpfung D, Zeitkonstante T
Vorlesung 13. Die Frequenzkennlinien / Frequenzgang
 Vorlesung 3 Die Frequenzkennlinien / Frequenzgang Frequenzkennlinien geben das Antwortverhalten eines linearen Systems auf eine harmonische (sinusförmige) Anregung in Verstärkung (Amplitude) und Phasenverschiebung
Vorlesung 3 Die Frequenzkennlinien / Frequenzgang Frequenzkennlinien geben das Antwortverhalten eines linearen Systems auf eine harmonische (sinusförmige) Anregung in Verstärkung (Amplitude) und Phasenverschiebung
Versuchsanleitung. Labor Mechatronik. Versuch DV_5 Regelkreis mit analogen Reglern. Labor Mechatronik Versuch BV-5 analoge Regelung
 Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Optimierung von Regelkreisen. mit P-, PI und PID Reglern
 mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Anhang: Regelungstechnische Bauteile des Buches
 Anhang: Regelungstechnische Bauteile des Buches P-Regler P-Reg Eingang für Regelgröße x Führungsgröße w Ausgang y y = Kp. (w - x) Einstellbare Attribute mit Vorschlags-(Default-)werten: Obere Begrenzung
Anhang: Regelungstechnische Bauteile des Buches P-Regler P-Reg Eingang für Regelgröße x Führungsgröße w Ausgang y y = Kp. (w - x) Einstellbare Attribute mit Vorschlags-(Default-)werten: Obere Begrenzung
Druckregelung mit WAGO und WinFACT 7 (BORIS)
") Druckregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS in das Simulationsprogramm.
Druckregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS in das Simulationsprogramm.
1.) Aufrufen des Programms WinFACT 7 (BORIS)
 Aufrufen des Programms WinFACT 7 (BORIS)") Dampftemperaturregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS
Dampftemperaturregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION
 Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION 1 LABORRICHTLINIEN 2 EINFÜHRUNG 3 PROZESS-STRUKTUR UND -DATEN 4 VERSUCHSVORBEREITUNG 5 VERSUCHSDURCHFÜHRUNG 6 DOKUMENTATION
Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION 1 LABORRICHTLINIEN 2 EINFÜHRUNG 3 PROZESS-STRUKTUR UND -DATEN 4 VERSUCHSVORBEREITUNG 5 VERSUCHSDURCHFÜHRUNG 6 DOKUMENTATION
Vorlesung 3. Struktur Ofensystem
 Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear
Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear
Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s)
 P (s)") 1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
Regelungstechnik I. Heinz JUnbehauen. Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme. 3., durchgesehene Auflage
 Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik FH Jena
 Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Versuchsanleitung MV_5_1
 Modellbildung und Simulation Versuchsanleitung MV_5_1 FB 2 Stand August 2011 Prof. Dr.-Ing. Hartenstein Seite 1 von 11 1. Versuchsgegenstand Versuchsziel Ziel des Versuches ist es, die im Lehrfach Mechatronische
Modellbildung und Simulation Versuchsanleitung MV_5_1 FB 2 Stand August 2011 Prof. Dr.-Ing. Hartenstein Seite 1 von 11 1. Versuchsgegenstand Versuchsziel Ziel des Versuches ist es, die im Lehrfach Mechatronische
Praktikum Regelungstechnik Versuch. TU Bergakademie Freiberg. Institut für. Versuchsziel:
 TU Bergakademie Freiberg Institut für Automatisierungstechnik Praktikum Regelungstechnik Versuch Regelkreis (RK) April 2004 Versuchsziel: - Kennenlernen der wesentlichen Eigenschaften des einfachen Regelkreises
TU Bergakademie Freiberg Institut für Automatisierungstechnik Praktikum Regelungstechnik Versuch Regelkreis (RK) April 2004 Versuchsziel: - Kennenlernen der wesentlichen Eigenschaften des einfachen Regelkreises
Reglerentwurf mit dem Frequenzkennlinienverfahren
 Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Autonome Mobile Systeme
 Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Optimierung. 1. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit.
 FELJC Optimierung_Theorie.odt Optimierung. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit. Hierzu gibt es unterschiedliche
FELJC Optimierung_Theorie.odt Optimierung. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit. Hierzu gibt es unterschiedliche
Synthese durch Rechner-Optimierung
 4.2.4. Synthese durch Rechner-Optimierung Möglichkeiten zum Finden passender Reglerparameter: 1. Theoretische Synthese (Herleitung der optimalen Werte) 2. Einstellregeln Messungen an der Strecke (z. B.
4.2.4. Synthese durch Rechner-Optimierung Möglichkeiten zum Finden passender Reglerparameter: 1. Theoretische Synthese (Herleitung der optimalen Werte) 2. Einstellregeln Messungen an der Strecke (z. B.
Ergänzung zur Regelungstechnik
 Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Regelungstechnik. Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder. i c =C du dt. Zustands.- und Ausgangsgleichungen:
 Regelungstechnik Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder Energiespeicher: Zustandsgröße: Kondensator Spannung i c C du Zustands.- und Ausgangsgleichungen: Aus den Knoten:
Regelungstechnik Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder Energiespeicher: Zustandsgröße: Kondensator Spannung i c C du Zustands.- und Ausgangsgleichungen: Aus den Knoten:
UNIVERSITÄT DUISBURG - ESSEN Fakultät für Ingenieurwissenschaften, Abt. Maschinenbau, Professur für Steuerung, Regelung und Systemdynamik
 Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
() 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)
 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)") Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Praktische Regelungstechnik
 Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
INSTITUT FÜR REGELUNGSTECHNIK
 Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Methoden der Regelungstechnik
 FELJC Methoden_der_Regelungstechnik_3.odt 1 Methoden der Regelungstechnik 5) Störgrößenaufschaltung a) Allgemeines Die Störgrößenaufschaltung ist eine Kombination aus Steuerung und Regelung. Zur Erinnerung:
FELJC Methoden_der_Regelungstechnik_3.odt 1 Methoden der Regelungstechnik 5) Störgrößenaufschaltung a) Allgemeines Die Störgrößenaufschaltung ist eine Kombination aus Steuerung und Regelung. Zur Erinnerung:
Regelung einer Luft-Temperatur-Regelstrecke
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten
Herbert Bernstein. Regelungstechnik. Theorie und Praxis. mit WinFACT und Multisim. Elektor-Verlag, Aachen
 Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Bestimmung der Reglerparameter aus den Frequenzkennlinien
 1 Kapitel Bestimmung der Reglerparameter aus den Frequenzkennlinien Mit PSPICE lassen sich die Frequenzgänge der Amplitude und der Phase von Regelkreisen simulieren, graphisch darstellen und mit zwei Cursors
1 Kapitel Bestimmung der Reglerparameter aus den Frequenzkennlinien Mit PSPICE lassen sich die Frequenzgänge der Amplitude und der Phase von Regelkreisen simulieren, graphisch darstellen und mit zwei Cursors
Regelungstechnik Aufgaben
 Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Zusammenfassung der 9. Vorlesung
 Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
(s + 3) 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)
 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)") Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Lösungen zur 8. Übung
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Lösungen zur 8. Übung
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen)
") Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1. 1. Methoden zur Untersuchung von Regelstrecken
 FELJC P_I_D_Tt.odt 1 Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1 (Zum Teil Wiederholung, siehe Kurs T2EE) 1. Methoden zur Untersuchung von Regelstrecken Bei der Untersuchung einer
FELJC P_I_D_Tt.odt 1 Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1 (Zum Teil Wiederholung, siehe Kurs T2EE) 1. Methoden zur Untersuchung von Regelstrecken Bei der Untersuchung einer
4. Der geschlossene Regelkreis mit P-Strecke und P-Regler
 FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
- Analoge Regelung -
 Labor Mechatronik Versuch V1 - Analoge Regelung - 1. Zielstellung... 2 2. Theoretische Grundlagen... 2 3. Versuchsdurchführung... 4 3.1. Versuchsaufbau... 4 3.2. Aufgabenstellung und Versuchsdurchführung...
Labor Mechatronik Versuch V1 - Analoge Regelung - 1. Zielstellung... 2 2. Theoretische Grundlagen... 2 3. Versuchsdurchführung... 4 3.1. Versuchsaufbau... 4 3.2. Aufgabenstellung und Versuchsdurchführung...
Kritik der Regler-Dimensionierung nach Ziegler und Nichols
 Axel Rossmann Thema: Regelungstechnik Kritik der Regler-Dimensionierung nach Ziegler und Nichols http://strukturbildung-simulation.de/ Kritik an Ziegler/Nichols - 1 - Apr 2013 Seite 1 Zum Thema Regelungstechnik:
Axel Rossmann Thema: Regelungstechnik Kritik der Regler-Dimensionierung nach Ziegler und Nichols http://strukturbildung-simulation.de/ Kritik an Ziegler/Nichols - 1 - Apr 2013 Seite 1 Zum Thema Regelungstechnik:
Praktikum Grundlagen Regelungstechnik
 Praktikum Grundlagen Regelungstechnik Versuch P-GRT 03 Versuchsziel Versuch 3 Photonenstromregelung Untersuchung vom Führungs- und Störverhalten Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Praktikum Grundlagen Regelungstechnik Versuch P-GRT 03 Versuchsziel Versuch 3 Photonenstromregelung Untersuchung vom Führungs- und Störverhalten Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Prüfung im Modul Grundlagen der Regelungstechnik Studiengänge Medizintechnik / Elektrotechnik
 Brandenburgische Technische Universität Cottbus-Senftenberg Fakultät 1 Professur Systemtheorie Prof. Dr.-Ing. D. Döring Prüfung im Modul Grundlagen der Regelungstechnik Studiengänge Medizintechnik / Elektrotechnik
Brandenburgische Technische Universität Cottbus-Senftenberg Fakultät 1 Professur Systemtheorie Prof. Dr.-Ing. D. Döring Prüfung im Modul Grundlagen der Regelungstechnik Studiengänge Medizintechnik / Elektrotechnik
Brühl. Mess- und Regeltechnik Sensorik u. Messtechnik 15. Januar 2011
 5 Reglerauswahl Die folgenden Textauszüge stammen im wesentlichen aus Schulungspublikationen der Fa. Samson / Frankfurt, sowie einer Veröffentlichung der Fa. Jumo 5.1 Auswahlkriterien Zur Lösung einer
5 Reglerauswahl Die folgenden Textauszüge stammen im wesentlichen aus Schulungspublikationen der Fa. Samson / Frankfurt, sowie einer Veröffentlichung der Fa. Jumo 5.1 Auswahlkriterien Zur Lösung einer
Lösungen zur 7. Übung
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf 2., neu bearbeitete Auflage Philippsen Einstieg in die Regelungstechnik Bleiben Sie auf dem Laufenden!
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf 2., neu bearbeitete Auflage Philippsen Einstieg in die Regelungstechnik Bleiben Sie auf dem Laufenden!
a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.
 Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.") 144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
Entwicklung eines hybriden Algorithmus für adaptive Regler im geschlossenen Regelkreis
 Entwicklung eines hybriden Algorithmus für adaptive Regler im geschlossenen Regelkreis Ensio Hokka Problemstellung In vielen industriellen Regelapplikationen besteht die Notwendigkeit die Parametrisierung
Entwicklung eines hybriden Algorithmus für adaptive Regler im geschlossenen Regelkreis Ensio Hokka Problemstellung In vielen industriellen Regelapplikationen besteht die Notwendigkeit die Parametrisierung
Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski. Regelschaltungen. Sprungantwort und Verhalten von Regelstrecken
 Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski Regelschaltungen Sprungantwort und Verhalten von Regelstrecken Inhaltsverzeichnis 1 Sprungantwort von Reglern 3 1.1 Reglertypen............................................
Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski Regelschaltungen Sprungantwort und Verhalten von Regelstrecken Inhaltsverzeichnis 1 Sprungantwort von Reglern 3 1.1 Reglertypen............................................
Ausarbeitung Regelungstechnik
 Ausarbeitung Regelungstechnik by Poth & Fiechtner 2005 by Poth & Fiechtner Seite 1/14 Inhalt Grundsätzliches zur Regelungstechnik Untersuchung des als Regelstrecke verwendeten Heizlüfters Regelkreis als
Ausarbeitung Regelungstechnik by Poth & Fiechtner 2005 by Poth & Fiechtner Seite 1/14 Inhalt Grundsätzliches zur Regelungstechnik Untersuchung des als Regelstrecke verwendeten Heizlüfters Regelkreis als
Strukturbildung und Simulation technischer Systeme. Strukturbildung und Simulation technischer Systeme. strukturbildung-simulation.
 Leseprobe zu Kapitel 9 Regelungstechnik des Buchs Strukturbildung und Simulation technischer Systeme Weitere Informationen zum Buch finden Sie unter strukturbildung-simulation.de Im Gegensatz zu Steuerungen
Leseprobe zu Kapitel 9 Regelungstechnik des Buchs Strukturbildung und Simulation technischer Systeme Weitere Informationen zum Buch finden Sie unter strukturbildung-simulation.de Im Gegensatz zu Steuerungen
Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler.
 Ziel des vierten Versuchs: Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler. 4. Berechnung, Simulation und Messung des Frequenzgangs einer I-Strecke F R (s) F S (s)
Ziel des vierten Versuchs: Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler. 4. Berechnung, Simulation und Messung des Frequenzgangs einer I-Strecke F R (s) F S (s)
Modellbasierte Software- Entwicklung eingebetteter Systeme
 Modellbasierte Software- Entwicklung eingebetteter Systeme Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für offene Kommunikationssysteme FOKUS Folie
Modellbasierte Software- Entwicklung eingebetteter Systeme Prof. Dr. Holger Schlingloff Institut für Informatik der Humboldt Universität und Fraunhofer Institut für offene Kommunikationssysteme FOKUS Folie
AN021. Application Note 021 zu MODULAR-4. Digitaler PID-Regler auf MODULAR-4
 MODULAR-4 Digitaler PID-Regler Application Note 21 AN021 Application Note 021 zu MODULAR-4 Digitaler PID-Regler auf MODULAR-4 Autor: M.H. AN021.DOC (7 Seiten) 1. Aufgabenstellung In vielen Fällen der Prozessautomatisierung
MODULAR-4 Digitaler PID-Regler Application Note 21 AN021 Application Note 021 zu MODULAR-4 Digitaler PID-Regler auf MODULAR-4 Autor: M.H. AN021.DOC (7 Seiten) 1. Aufgabenstellung In vielen Fällen der Prozessautomatisierung
Regelungstechnik 1. Oldenbourg Verlag München Wien
 Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Reglerentwurf nach dem Betragsoptimum
 eglerentwurf nach dem Betragsoptimum. Grundlegende Überlegungen eglerentwurf nach dem Betragsoptimum In diesem Abschnitt beschäftigen wir uns mit einem einfachen Entwurfsverfahren für egler, das ein hervorragendes
eglerentwurf nach dem Betragsoptimum. Grundlegende Überlegungen eglerentwurf nach dem Betragsoptimum In diesem Abschnitt beschäftigen wir uns mit einem einfachen Entwurfsverfahren für egler, das ein hervorragendes
Praktische Regelungstechnik
 Wolfgang Schneider Praktische Regelungstechnik Ein Lehr- und Ubungsbuch fur Nicht-Elektrotechniker 3., vollstandig iiberarbeitete und erweiterte Auflage Mit 429 Abbildungen, 72 Tabellen und 54 Ubungsaufgaben
Wolfgang Schneider Praktische Regelungstechnik Ein Lehr- und Ubungsbuch fur Nicht-Elektrotechniker 3., vollstandig iiberarbeitete und erweiterte Auflage Mit 429 Abbildungen, 72 Tabellen und 54 Ubungsaufgaben
Mehrgrößenregelung. Aufgabensammlung
 Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen Beschreibung dynamischer Systeme Regelkreis
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen Beschreibung dynamischer Systeme Regelkreis
Labor RT Versuch RT1-1. Versuchsvorbereitung. Prof. Dr.-Ing. Gernot Freitag. FB: EuI, FH Darmstadt. Darmstadt, den
 Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Stellen Sie für das im folgenden Signalflussbild dargestellte dynamische System ein Zustandsraummodell K
 Aufgaben Aufgabe : Stellen Sie für das im folgenden Signalflussbild dargestellte dnamische Sstem ein Zustandsraummodell auf. u 2 7 5 Aufgabe 2: Wir betrachten das folgende Regelsstem vierter Ordnung: r
Aufgaben Aufgabe : Stellen Sie für das im folgenden Signalflussbild dargestellte dnamische Sstem ein Zustandsraummodell auf. u 2 7 5 Aufgabe 2: Wir betrachten das folgende Regelsstem vierter Ordnung: r
Automation-Letter Nr. 1. Prof. Dr. S. Zacher. Die meistgestellten Fragen von Studierenden der Regelungstechnik
 Automation-Letter Nr. 1 Angefangen : 01.11.2015 Aktueller Stand 08.08.2017 Prof. Dr. S. Zacher Die meistgestellten Fragen von Studierenden der Regelungstechnik Ein optimal eingestellter Regelkreis soll
Automation-Letter Nr. 1 Angefangen : 01.11.2015 Aktueller Stand 08.08.2017 Prof. Dr. S. Zacher Die meistgestellten Fragen von Studierenden der Regelungstechnik Ein optimal eingestellter Regelkreis soll
HINWEISE zur Identifikation einer Regelstrecke nach Versuchsdaten mit MATLAB
 Die Sprungantwort ist der Steckbrief der Regelstrecke. S. Samal, W. Becker: Grundriß der praktischen Regelungstechnik, 20. Auflage, Verlag Oldenbourg, 2000, Seite 104 HINWEISE zur Identifikation einer
Die Sprungantwort ist der Steckbrief der Regelstrecke. S. Samal, W. Becker: Grundriß der praktischen Regelungstechnik, 20. Auflage, Verlag Oldenbourg, 2000, Seite 104 HINWEISE zur Identifikation einer
Praktikum Grundlagen Regelungstechnik
 Praktikum Grundlagen Regelungstechnik Versuch P-GRT 04 Versuchsziel Versuch 4 - Durchflussregelung Analyse unterschiedlicher Regelstrecken Untersuchung des Schwingungsverhalten der Regelstrecken Datum
Praktikum Grundlagen Regelungstechnik Versuch P-GRT 04 Versuchsziel Versuch 4 - Durchflussregelung Analyse unterschiedlicher Regelstrecken Untersuchung des Schwingungsverhalten der Regelstrecken Datum
Regelungstechnik II. Institut für Leistungselektronik und Elektrische Antriebe. Übungen
 Regelungstechnik II Übungen 2 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Der Operationsverstärker (OV, OP) 3 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Aufgaben
Regelungstechnik II Übungen 2 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Der Operationsverstärker (OV, OP) 3 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Aufgaben
GRT Laborbericht Realisierung einer Drehzahlregelung
 GRT Laborbericht Realisierung einer Drehzahlregelung Andreas Hofmeier Auftraggeber: Prof. Dr. Philippsen, Fachhochschule Bremen Ort der Durchführung: FH Bremen, Flughafenallee 10, Labor-Platz 5 im Raum
GRT Laborbericht Realisierung einer Drehzahlregelung Andreas Hofmeier Auftraggeber: Prof. Dr. Philippsen, Fachhochschule Bremen Ort der Durchführung: FH Bremen, Flughafenallee 10, Labor-Platz 5 im Raum
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Bild 86. Eingrößenregelung. w Führungsgröße (Sollwert), e Regeldifferenz, y Stellgröße, z Störgröße, x Regelgröße (Istwert).
, e Regeldifferenz, y Stellgröße, z Störgröße, x Regelgröße (Istwert).") Beispiel: PID-Regelalgorithmus Zur Vertiefung der im letzten Abschnitt behandelten Fragen soll die numerische Aufbereitung eines PID-Algorithmus mit Festpunktarithmetik behandelt werden. Den zugrundeliegenden,
Beispiel: PID-Regelalgorithmus Zur Vertiefung der im letzten Abschnitt behandelten Fragen soll die numerische Aufbereitung eines PID-Algorithmus mit Festpunktarithmetik behandelt werden. Den zugrundeliegenden,
Klausur im Fach: Regelungs- und Systemtechnik 1
 (in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
(in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
A. Modellierung: Standardstrecken anhand der Gleichstrommaschine
 Bewegungssteuerung durch geregelte elektrische Antriebe Übung 1 (WS17/18) Alle Abbildungen und Übungsunterlagen (Einführungsfolien, Übungsblätter, Musterlösungen, MATLAB-Übungen/Lösungen und Formelsammlung)
Bewegungssteuerung durch geregelte elektrische Antriebe Übung 1 (WS17/18) Alle Abbildungen und Übungsunterlagen (Einführungsfolien, Übungsblätter, Musterlösungen, MATLAB-Übungen/Lösungen und Formelsammlung)
Kraftwerks- und Prozeßleittechnik. Reglereinstellhilfe AE 4012 BS-EH
 Kraftwerks- und Prozeßleittechnik Reglereinstellhilfe AE 4012 BS-EH Technische Änderungen behalten wir uns vor. Für die Errichtung und Inbetriebnahme sind die gültigen Bestimmungen zu beachten. Eine Gewähr
Kraftwerks- und Prozeßleittechnik Reglereinstellhilfe AE 4012 BS-EH Technische Änderungen behalten wir uns vor. Für die Errichtung und Inbetriebnahme sind die gültigen Bestimmungen zu beachten. Eine Gewähr
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Praktikum Grundlagen Regelungstechnik
 Praktikum Grundlagen Regelungstechnik Versuch P-GRT 05 Versuchsziel Versuch 5 - Reglerentwurf im Frequenzbereich COM3LAB Veränderung des Streckenfrequenzganges durch einen vorgeschalteten Regler Datum
Praktikum Grundlagen Regelungstechnik Versuch P-GRT 05 Versuchsziel Versuch 5 - Reglerentwurf im Frequenzbereich COM3LAB Veränderung des Streckenfrequenzganges durch einen vorgeschalteten Regler Datum
G S. p = = 1 T. =5 K R,db K R
 TFH Berlin Regelungstechnik Seite von 0 Aufgabe 2: Gegeben: G R p =5 p 32ms p 32 ms G S p = p 250 ms p 8 ms. Gesucht ist das Bodediagramm von G S, G R und des offenen Regelkreises. 2. Bestimmen Sie Durchtrittsfrequenz
TFH Berlin Regelungstechnik Seite von 0 Aufgabe 2: Gegeben: G R p =5 p 32ms p 32 ms G S p = p 250 ms p 8 ms. Gesucht ist das Bodediagramm von G S, G R und des offenen Regelkreises. 2. Bestimmen Sie Durchtrittsfrequenz
Schriftliche Prüfung aus Control Systems 2 am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Sstems 2 am 23.01.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Bonuspunkte aus den MATLAB-Übungen:
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Sstems 2 am 23.01.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Bonuspunkte aus den MATLAB-Übungen:
Regelungstechnik für Ingenieure
 Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
1 Reglerentwurf nach dem Betragsoptimum
 Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Füllstandsstrecke SF 100
 Füllstandsstrecke SF 100 Das Problem: Begriffe und Vorgänge der erfahrbar machen. Auswahl einer anschaulichen didaktischen reduzierten, aber trotzdem praxisnahen Regelstrecke. Die Lösung: Die»trockene«Füllstandsstrecke
Füllstandsstrecke SF 100 Das Problem: Begriffe und Vorgänge der erfahrbar machen. Auswahl einer anschaulichen didaktischen reduzierten, aber trotzdem praxisnahen Regelstrecke. Die Lösung: Die»trockene«Füllstandsstrecke
Prof. Dr. Tatjana Lange
 Prof. Dr. Tatjana Lange Lehrgebiet: Regelungstechnik Laborübung 1: Thema: Einführrung in die digitale Regelung Übungsziele Veranschaulichung der Abtastung von bandbegrenzten Signalen und der Reproduktion
Prof. Dr. Tatjana Lange Lehrgebiet: Regelungstechnik Laborübung 1: Thema: Einführrung in die digitale Regelung Übungsziele Veranschaulichung der Abtastung von bandbegrenzten Signalen und der Reproduktion
Regelungstechnik und Simulationstechnik mit Scilab und Modelica
 Peter Beater Regelungstechnik und Simulationstechnik mit Scilab und Modelica Eine beispielorientierte Einführung für Studenten und Anwender aus dem Maschinenbau Inhaltsverzeichnis Begriffe und Formelzeichen
Peter Beater Regelungstechnik und Simulationstechnik mit Scilab und Modelica Eine beispielorientierte Einführung für Studenten und Anwender aus dem Maschinenbau Inhaltsverzeichnis Begriffe und Formelzeichen
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik *v Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern 13 1.1.2 Regeln
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik *v Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern 13 1.1.2 Regeln
Bei Fragen oder Anregungen zu dieser Übung wenden Sie sich bitte an Martin Saxinger oder
 4 Regelungen In dieser Übung werden Regler für die beiden in den vorangegangenen Übungen betrachteten Laborversuche, die Gleichstrommaschine und den Rotary Flexible Joint, entwickelt. Basierend auf den
4 Regelungen In dieser Übung werden Regler für die beiden in den vorangegangenen Übungen betrachteten Laborversuche, die Gleichstrommaschine und den Rotary Flexible Joint, entwickelt. Basierend auf den
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Regelungstechnik B. Prof. Dr. techn. F. Gausch Dipl.-Ing. C.
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 2., korrigierte Auflage Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 2., korrigierte Auflage Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern
Praktikum Grundlagen Regelungstechnik
 Praktikum Grundlagen Regelungstechnik Versuch P-GRT 01 Versuchsziel Versuch 1 Füllstandsregelung Analyse und Optimierung unterschiedlicher Regelstrecken Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Praktikum Grundlagen Regelungstechnik Versuch P-GRT 01 Versuchsziel Versuch 1 Füllstandsregelung Analyse und Optimierung unterschiedlicher Regelstrecken Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Elementare Regelungstechnik
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung
SYNTHESE LINEARER REGELUNGEN
 Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Regelsysteme Übung: Reglerentwurf nach Spezifikation im Zeitbereich. Damian Frick. Herbstsemester Institut für Automatik ETH Zürich
 Regelsysteme 6. Übung: Reglerentwurf nach Spezifikation im Zeitbereich Damian Frick Institut für Automatik ETH Zürich Herbstsemester 205 Damian Frick Regelsysteme Herbstsemester 205 6. Übung: Reglerentwurf
Regelsysteme 6. Übung: Reglerentwurf nach Spezifikation im Zeitbereich Damian Frick Institut für Automatik ETH Zürich Herbstsemester 205 Damian Frick Regelsysteme Herbstsemester 205 6. Übung: Reglerentwurf
Laborversuch Digitaler Regler
 Laborversuch Digitaler Regler Vorbereitung und Durchführung Ausgabe 0.1, Februar 2015 S. Rupp, H. Huning T2ELA2851.1,T2ELG2004.1 Ergänzung 1/8 Inhaltsverzeichnis 1. Vorbereitung: Drehzahlregelung mit PID
Laborversuch Digitaler Regler Vorbereitung und Durchführung Ausgabe 0.1, Februar 2015 S. Rupp, H. Huning T2ELA2851.1,T2ELG2004.1 Ergänzung 1/8 Inhaltsverzeichnis 1. Vorbereitung: Drehzahlregelung mit PID
RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors
 RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors Quelle: http://de.wikipedia.org/w/index.php?title=datei:radialventilator- Wellringrad.jpg&filetimestamp=20061128101719 (Stand: 26.09.2012) Martin
RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors Quelle: http://de.wikipedia.org/w/index.php?title=datei:radialventilator- Wellringrad.jpg&filetimestamp=20061128101719 (Stand: 26.09.2012) Martin
Regelungstechnik für Ingenieure
 Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM