Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen)
|
|
|
- Carin Kuntz
- vor 7 Jahren
- Abrufe
Transkript
1 Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014
2 Übung 1 - Vorbereitung zum Praktikum Prozessregelung 1. Modellierung des Streckenverhaltens a) Stellen Sie die nichtlineare Differentialgleichung für den Füllstandsbehälter (i V h) anhand der Bilanzgleichung auf. b) Linearisieren Sie die DGL mittels Taylorreihenentwicklung. c) Bestimmen Sie die Differentialgleichungen für die weiteren Teilsysteme (h i m, i m u m, u m u F ). d) Geben Sie die Gleichung des Gesamtsystems an. e) Leiten Sie die Übertragungsfunktion aus der DGL her. 2. Vorbereitung Reglerentwurf a) Stellen Sie den allgemeinen Regelkreis mit Führungsgröße, Last- und Speisestörung als Blockschaltbild dar. b) Identifizieren Sie die einzelnen Größen für das Beispiel der Füllstandsregelung. c) Geben Sie den funktionalen Zusammenhang für die Eingangs- und Ausgangsgrößen wieder. d) Geben Sie die Übertragungsfunktion des realen PID-Reglers an. e) Skizzieren Sie jeweils die Sprungantwort der einzelnen Anteile sowie die des gesamten Reglers. f) Welche Bedeutung hat der Tiefpassfilter für die Regelung? 3. (ZA) Lösung der Differentialgleichung a) Lösen Sie die linearisierte Differentialgleichung des Füllstandsbehälters für ein sprungförmiges Eingangssignal. b) Im Praktikumsversuch wird die Füllhöhe für verschiedene Ventilstellungen bestimmt. Ist nach einem Stellgrößensprung der Endwert mit einer vorgegebenen Genauigkeit (von bspw. 95 %) erreicht, so wird die zugehörige Höhe abgelesen. Welchen Einfluß hat die Sprunghöhe x e0 auf den Ablesezeitpunkt?
3 Übung 2 - Vorbereitung zum Praktikum Stabilität durch Regelung 1. Grundlagen Stabilität für PT 2 -Systeme a) Geben Sie die allgemeine Differentialgleichung eines PT 2 -Systems mit Dämpfungsfaktor D an und stellen Sie den Zusammenhang zur allgemeinen DGL n-ter Ordnung durch Parameterabgleich her. b) Geben Sie die allgemeine Berechnungvorschrift für die Pole des Systems an. c) Bestimmen Sie für D = 0, D = 1, D > 1, 0 < D < 1, D = 1, D < 1 und 1 < D < 0 Folgende Eigenschaften: Pole (mathematische Beschreibung und Lage im Pol-Nullstellen-Plan) Stabilität Schwingungsverhalten Verlauf der Sprungantwort (Skizze) 2. Modellierung des Schwebekörpersystems a) Geben Sie alle Kräfte an, welche auf den Schwebekörper einwirken. b) Bestimmen Sie die Differentialgleichung des Systems. c) Berechnen Sie die Pole und treffen Sie eine Aussage zur Stabilität. d) Lösen Sie die Differentialgleichung für einen sprungförmigen Eingangssteuerstrom der Höhe I St,0. 3. Regelung der Strecke Geben Sie die Differentialgleichungen für den jeweiligen Reglertyp an. Bestimmen Sie die Gleichung für den geschlossenen Kreis und treffen Sie eine Aussage zur Stabilität in Abhängigkeit der Reglerparameter. Welche bleibende Regelabweichung tritt beim jeweiligen Reglertyp auf? a) P-Regler b) PD-Regler c) PID-Regler
4 1. Systeme erster Ordnung Das dynamische Verhalten einer Strecke wird durch die Übertragungsfunktion beschrieben. F (p) = a) Wie nennt man dieses Übertragungsglied? K T p + 1 b) Geben Sie die korrespondierende Differentialgleichung an. Identifizieren Sie dazu zunächst a 0, b 0 und b 1. c) Charakterisieren Sie die DGL. d) Skizzieren und beschriften Sie die Übergangsfunktion h(t). Tragen Sie die Systemparameter K und T ein. e) Nennen Sie ein Beispiel für ein solches System.
5 2. Systeme erster Ordnung - Lösung der DGL Für das System sind folgende Parameter gegeben: T ẋ a (t) + x a (t) = Kx e (t) T = 10s und K = 2. a) Geben Sie die homogene Differentialgleichung an. b) Berechnen Sie alle Pole des Systems und stellen Sie deren Lage grafisch dar. c) Ist das vorliegende System stabil? Begründen Sie ihre Antwort. d) Geben Sie die homogene Lösung x h (t) der Differentialgleichung an. e) Das System wird durch einen Sprung der Höhe x e0 angeregt. Berechnen Sie die partikuläre Lösung x part (t) der Differentialgleichung. f) Geben Sie die Gesamtlösung der Differentialgleichung x ges (t) an. g) Bestimmen Sie den unbekannten Parameter aus der Gesamtlösung, wenn die Anfangsbedingung x ges (t = 0) = 0 gilt. h) Skizzieren und beschriften Sie die Übergangsfunktion h(t). Tragen Sie die Systemparameter K und T ein.
6 3. Systeme erster Ordnung - Regelung Die Strecke F S (p) = 3 15p + 1 soll mit einem P-Regler geregelt werden. a) Geben Sie die Übertragungsfunktion F R (p) des Reglers an. b) Bestimmen Sie die Übertragungsfunktion F W (p) für das Führungsverhalten des geschlossenen Kreises, wenn die Verstärkung des Reglers K R = 5 beträgt. c) Der Sollwert wird sprungartig um 1 erhöht. Bestimmen Sie den Faktor der bleibenden Regelabweichung x w. d) Am Eingang der Strecke greift eine sprungartige Störung z = 2 an. Wie groß ist die Abweichung vom Arbeitspunkt, wenn das System den stationären Zustand erreicht? e) Welcher Reglertyp ermöglicht es, die bleibende Regelabweichung zu eliminieren? Begründen Sie ihre Antwort.
7 4. Systeme erster Ordnung - Parameterbestimmung (Identifikation) Für eine Strecke wird das Modell F (p) = K T p + 1 angenommen. Im Beharrungszustand wurde folgender Zusammenhang zwischen Ein- und Ausgangsgröße gemessen: x e x a Tabelle 1: Messwerte im Beharrungszustand Weiterhin wurde die Eingangsgröße x e sprungartig geändert (kein Einheitssprung) und der Verlauf der Ausgangsgröße aufgezeichnet. Abbildung 1: Sprungantwort (kein Einheitssprung) a) Zeichnen Sie die statische Kennlinie der Strecke. b) Ermitteln Sie grafisch die Verstärkung K und die Zeitkonstante T der Strecke. c) Bestimmen Sie die Höhe x e0 des Eingangssprunges und skizzieren Sie den Verlauf.
8 5. Systeme zweiter Ordnung - Lösung der DGL Gegeben ist folgende Differentialgleichung: 10ẍ a (t) + 7ẋ a (t) + x a (t) = x e (t) a) Welches regelungstechnische Übertragungsglied liegt vor? b) Wie lautet die homogene Gleichung des Systems? c) Wie lautet die charakteristische Gleichung? d) Berechnen Sie die Pole des Systems. e) Ist das System stabil? Begründen Sie Ihre Antwort. f) Geben Sie die homogene Lösung der Differentialgleichung an. g) Das System wird durch einen Sprung der Höhe x e0 angeregt. Berechnen Sie die partikuläre Lösung. h) Wie lautet die Gesamtlösung x ges (t)? i) Bestimmen Sie die unbekannten Parameter c 1 und c 2 durch die Anfangsbedingungen ẋ ges (0) = x ges (0) = 0. j) Skizzieren Sie die Übergangsfunktion h(t).
9 6. Systeme zweiter Ordnung - Regelung Ein System 2. Ordnung wird durch die folgende Differentialgleichung beschrieben: ẍ(t) 25ẋ(t) 5x(t) = 2y(t) a) Treffen Sie eine Aussage zur Stabilität des Systems und begründen Sie Ihre Antwort. b) Das System ist mit Hilfe eines PD-Reglers zu regeln. Geben Sie die Differentialgleichung für diesen Reglertyp an. c) Geben Sie die Differentialgleichung des geschlossenen Regelkreises an. d) Untersuchen Sie das Gesamtsystem bezüglich Stabilität in Abhängigkeit der zwei Reglerparameter. e) Die Reglerverstärkung sei 10, die Vorhaltezeit beträgt 3 s. Bestimmen Sie den Faktor der bleibenden Regelabweichung x w. f) Wie lässt sich die bleibende Regelabweichung eliminieren?
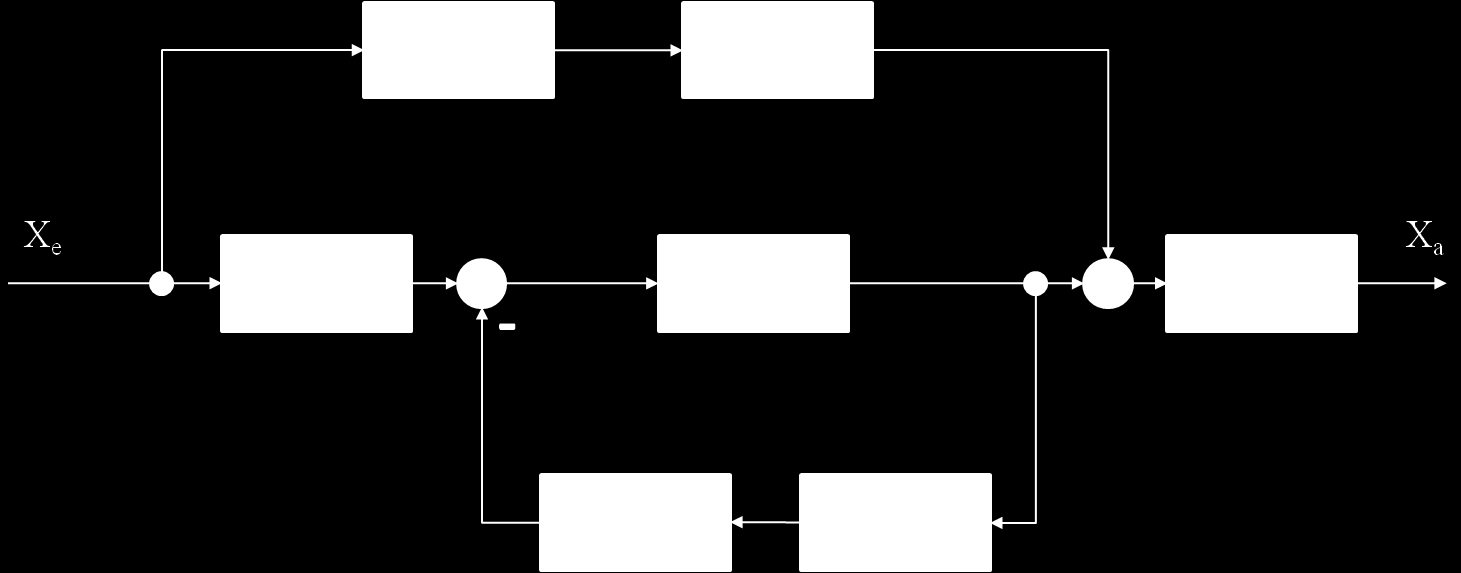
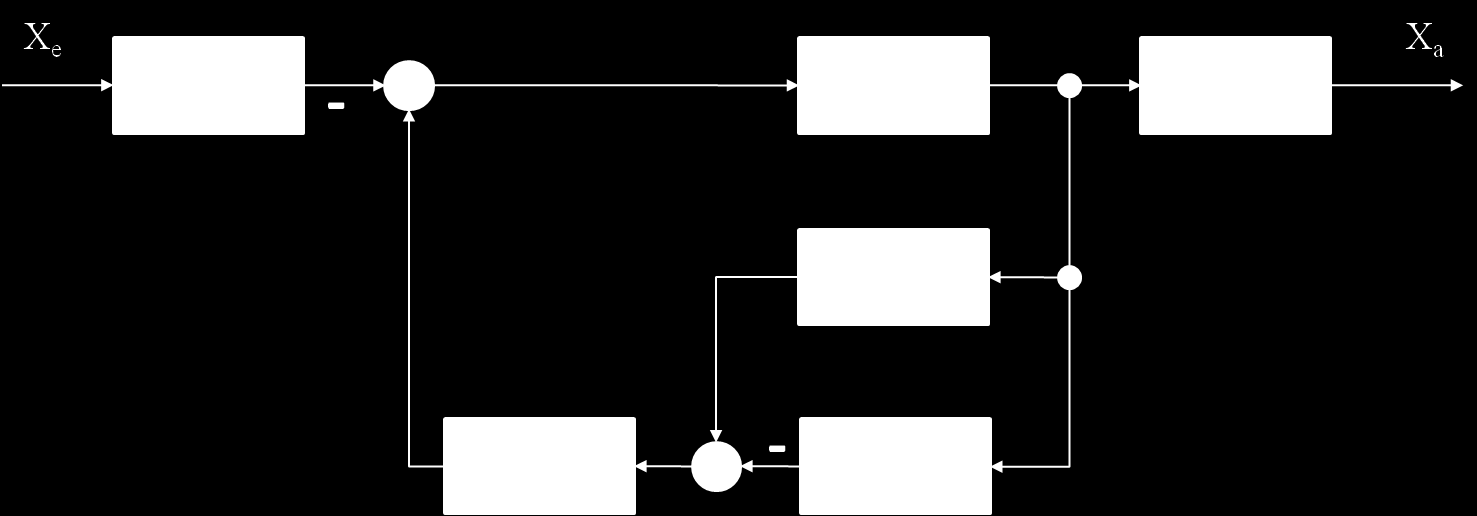

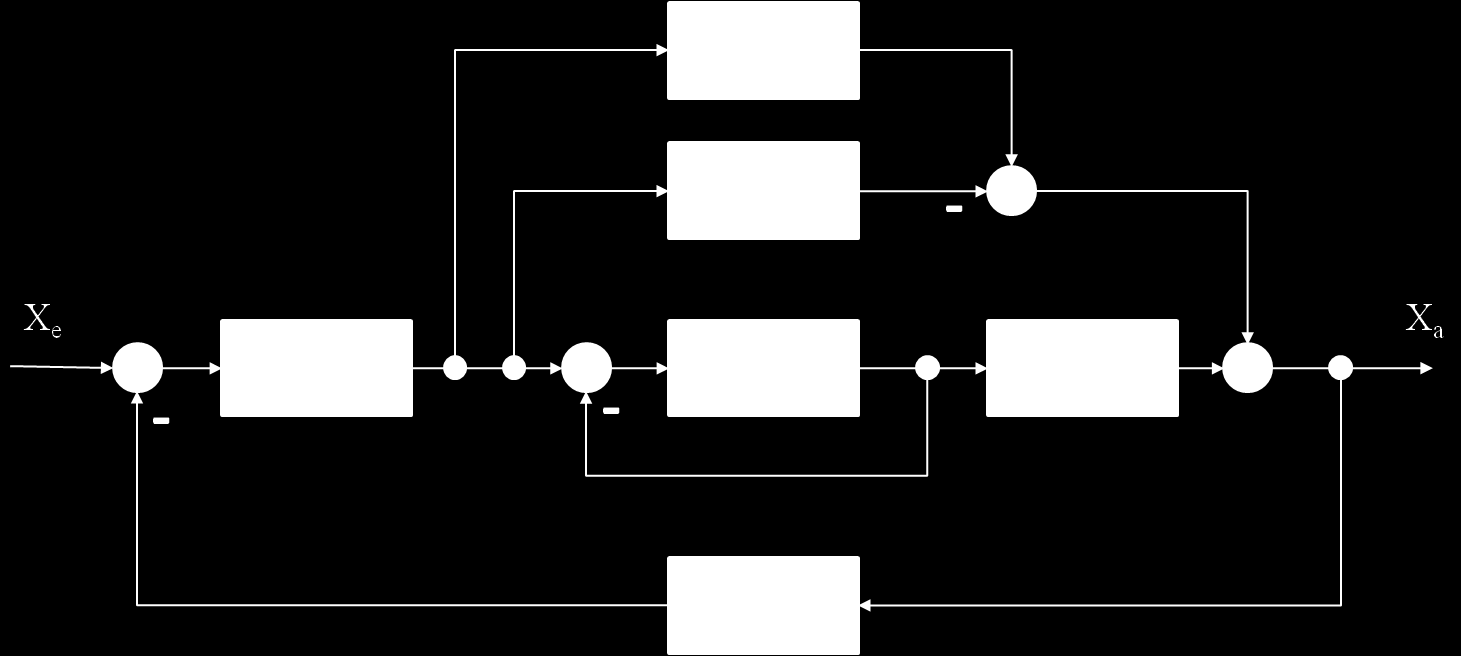
10 7. Blockschaltbildalgebra Stellen Sie die Gesamtübertragungsfunktion F Ges als Funktion der jeweiligen Teilübertragungsfunktionen mit Rechenweg dar. a) b) c) d)
11 8. Systeme erster Ordnung - Kenngrößen Für ein PT 1 -System sind die Parameter T = 10 s und K = 3 gegeben. a) Stellen Sie die zugehörige Differentialgleichung auf und geben Sie deren Lösung für ein Sprungsignal der Höhe x e0 an. b) Wie lange benötigt das System bei einem Einheitssprung, bis 99 % des Endwertes erreicht sind? c) Auf welche Zeitspanne verändert sich der in b) ermittelte Wert, wenn die Sprunghöhe x e0 verdoppelt wird? d) Das System ist mit einem P-Regler zu regeln. Wie groß muss die Reglerverstärkung K R sein, wenn die Abweichung vom Endwert maximal 5 % betragen soll? e) Die Zeitdauer, bis das geregelte System 99 % seines Endwertes erreicht hat, soll auf 1, 5 s begrenz werden. Wie muss K R gewählt werden?
12 9. Systeme erster Ordnung - Anstiegsantwort Für ein System erster Ordnung ist folgende Übertragungsfunktion gegeben: F (p) = X a(p) X e (p) = a) Welches regelungstechnische System liegt vor? b) Geben Sie die zugehörige Differentialgleichung an. K T p + 1 c) Bestimmen Sie die Polstellen des Systems und geben Sie die homogene Lösung der Differentialgleichung an. d) Bestimmen Sie die partikuläre Lösung, wenn am Eingang eine Rampenfunktion (Anstiegsfunktion) x e (t) = mt anliegt. e) Geben Sie die Gesamtlösung x ges (t) an und bestimmen Sie den Parameter c, wenn die Anfangsbedingung x ges (t = 0) = 0 gilt. f) Skizzieren Sie den Verlauf der Anstiegsantwort für eine Einheitsrampe (m = 1).
13 10. Systeme zweiter Ordnung - Schwingungsverhalten Ein System zweiter Ordnung wird durch die Differentialgleichung T 2 ẍ a (t) + 2DT ẋ a (t) + x a (t) = Kx e (t) beschrieben. Die Parameter sind mit T = 10 s, D = 0, 6 und K = 1 gegeben. a) Welches regelungstechnische System liegt vor? b) Bestimmen Sie die Polstellen des Systems und skizzieren Sie deren Lage. c) Geben Sie die homogene Lösung der Differentialgleichung an. d) Bestimmen Sie die partikuläre Lösung, wenn am Eingang eine Einheitssprungfunktion anliegt. e) Geben Sie die Gesamtlösung x ges (t) an und bestimmen Sie die unbekannten Parameter. f) Skizzieren Sie den Verlauf der Übergangsfunktion. g) Zu welchem Zeitpunkt erreicht die Übergangsfunktion ihr Maximum? Wie groß ist dieser Maximalwert?
14 11. Systeme mit integralem Verhalten Ein regelungstechnischer Prozess wird durch die Differentialgleichung T 1 ẋ a (t) + x a (t) = 1 x e (t) dt T N mit T 1 = 5 s und T N = 10 s beschrieben. a) Welches regelungstechnische Übertragungsglied liegt vor? b) Ist das vorliegende System stabil? Begründen Sie Ihre Antwort. c) Das System ist mit Hilfe eines idealen PD-Reglers zu regeln. Geben Sie die Differentialgleichung für den Regler an und bestimmen Sie die Differentialgleichung des geschlossenen Kreises für Führungs- und Speisestörverhalten. d) Wie groß ist die bleibende Regelabweichung nach einem Führungsgrößensprung der Höhe w 0? e) Die Reglerverstärkung sei K R 1. Das System befindet sich im Arbeitspunkt. Am Eingang der Strecke greift eine sprungförmige Störung der Höhe z 0 an. Wie groß ist die Auslenkung des Systems vom Arbeitspunkt im stationären Zustand? f) Für das Führungsverhalten sei die Reglerverstärkung 2. Wie groß ist die Vorhaltezeit, wenn der geschlossene Kreis ein nichtschwingendes Verhalten aufweisen soll.
15 12. Systeme mit differentiellem Verhalten Ein regelungstechnischer Prozess besitzt die Übertragungsfunktion mit T 1 = 6 s, T 2 = 5 s und K D = 2. F (p) = X a(p) X e (p) = K D p (T 1 p + 1)(T 2 p + 1) a) Welches regelungstechnische Übertragungsglied liegt vor? b) Ist das vorliegende System stabil? Begründen Sie Ihre Antwort. c) Berechnen sie die Übergangsfunktion des Systems mit Hilfe der Laplacetransformation. Hinweis: σ(t) 1 p e at 1 p + a d) Welchen Endwert nimmt h(t) im stationären Zustand ein? e) Das System ist mit Hilfe eines I-Reglers zu regeln. Welches regelungstechnische Verhalten zeigt der geschlossenen Kreis? f) Ist das Gesamtsystem für eine Nachstellzeit von T N = 1 s schwingungsfähig? g) Wie groß ist der Faktor der bleibenden Regelabweichung bei gleicher Nachstellzeit?
16 Lösungen ( ) 2 g) x ges (t) = 2x e0 1 e t 10 x 3 c) w = d) x = b) K 1, 7 T 6 s c) x e0 1, 6 5 h) x ges (t) = c 1 e t 2 + c 2 e t 5 + x e0 i) c 1 = 2 3 x e0 c 2 = 5 3 x e0 6 d) K R > 5 2 T V > 25 2 K R x e) w = 4 3 F 7 a) F = F 7 (F 2 F 3 + F 4 1 ( F b) F = F 1 F 2 6 ) 1+F 4 F 5 F) 6 1 F 2 F 5 (F 3 F 4 ) ) c) F = F 6 (F 4 F 5 + F 1F 2 1+F 1 F 2 F 3 1 ( ) F F 6 F 4 +F F 2 d) F = F 1 ) F 1+F 5 F 1 (F 6 F 4 +F F 2 8 b) t 4, 61 T d) K R > 19 3 e) K R = 9, 9 [ ( )] 9 e) x ges (t) = Km t + T e t [ T 1 ( ) 10 e) x ges (t) = e 3 50 t cos 2 25 t g) t max = 25 2 π x ges (t max ) = e 3 4 π d) x a = w 0 e) x a = z 0 K R f) T V 5 ( ) 12 c) h(t) = 2 e t 6 e t 5 d) lim h(t) = 0 t g) x a w = sin ( 2 25 t )] + 1
Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s)
 P (s)") 1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
Prüfung im Modul Grundlagen der Regelungstechnik Studiengänge Medizintechnik / Elektrotechnik
 Brandenburgische Technische Universität Cottbus-Senftenberg Fakultät 1 Professur Systemtheorie Prof. Dr.-Ing. D. Döring Prüfung im Modul Grundlagen der Regelungstechnik Studiengänge Medizintechnik / Elektrotechnik
Brandenburgische Technische Universität Cottbus-Senftenberg Fakultät 1 Professur Systemtheorie Prof. Dr.-Ing. D. Döring Prüfung im Modul Grundlagen der Regelungstechnik Studiengänge Medizintechnik / Elektrotechnik
Lösungen zur 8. Übung
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.
 Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.") 144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
x 1 + u y 2 = 2 0 x 2 + 4u 2.
 3. Übung: Regelkreis Aufgabe 3.1. Gegeben sind die beiden linearen zeitkontinuierlichen Systeme 3 2 2 ẋ 1 = 6 5 x 1 + 1 u 1 6 2 3 [ ] y 1 = 2 x 1 (3.1a) (3.1b) und [ ] [ ] 8 15 1 ẋ 2 = x 2 + 6 1 4 [ ]
3. Übung: Regelkreis Aufgabe 3.1. Gegeben sind die beiden linearen zeitkontinuierlichen Systeme 3 2 2 ẋ 1 = 6 5 x 1 + 1 u 1 6 2 3 [ ] y 1 = 2 x 1 (3.1a) (3.1b) und [ ] [ ] 8 15 1 ẋ 2 = x 2 + 6 1 4 [ ]
UNIVERSITÄT DUISBURG - ESSEN Fakultät für Ingenieurwissenschaften, Abt. Maschinenbau, Professur für Steuerung, Regelung und Systemdynamik
 Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Regelungstechnik B. Prof. Dr. techn. F. Gausch Dipl.-Ing. C.
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
SYNTHESE LINEARER REGELUNGEN
 Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Schriftliche Prüfung aus Control Systems 2 am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Sstems 2 am 23.01.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Bonuspunkte aus den MATLAB-Übungen:
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Sstems 2 am 23.01.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Bonuspunkte aus den MATLAB-Übungen:
Lösungen zur 8. Übung
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
ka (s + c 0 )(s + c 1 )s 1 c 0 (c 0 c 1 ) e c 0t + lim = k R k max = π 4T t b2) und aus der Hauptlösung der Phasenbedingung die Reglerverstärkung
(s + c 1 )s 1 c 0 (c 0 c 1 ) e c 0t + lim = k R k max = π 4T t b2) und aus der Hauptlösung der Phasenbedingung die Reglerverstärkung") Aufgabe 1: Systemanalyse a) Sprungantwort des Übertragungssystems: X(s) = ka (s + c 0 )(s + c 1 )s a1) Zeitlicher Verlauf der Sprungantwort: [ 1 x(t) = ka + c 0 c 1 a2) Man erhält dazu den Endwert: 1 c
Aufgabe 1: Systemanalyse a) Sprungantwort des Übertragungssystems: X(s) = ka (s + c 0 )(s + c 1 )s a1) Zeitlicher Verlauf der Sprungantwort: [ 1 x(t) = ka + c 0 c 1 a2) Man erhält dazu den Endwert: 1 c
Ergänzung zur Regelungstechnik
 Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Systemtheorie
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Systemtheorie Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski Dipl.-Ing. R. Besrat 05.04.2013 Übungsaufgaben zur Systemtheorie
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Systemtheorie Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski Dipl.-Ing. R. Besrat 05.04.2013 Übungsaufgaben zur Systemtheorie
(s + 3) 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)
 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)") Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
- Analoge Regelung -
 Labor Mechatronik Versuch V1 - Analoge Regelung - 1. Zielstellung... 2 2. Theoretische Grundlagen... 2 3. Versuchsdurchführung... 4 3.1. Versuchsaufbau... 4 3.2. Aufgabenstellung und Versuchsdurchführung...
Labor Mechatronik Versuch V1 - Analoge Regelung - 1. Zielstellung... 2 2. Theoretische Grundlagen... 2 3. Versuchsdurchführung... 4 3.1. Versuchsaufbau... 4 3.2. Aufgabenstellung und Versuchsdurchführung...
60 Minuten Seite 1. Einlesezeit
 60 Minuten Seite 1 Einlesezeit Für die Durchsicht der Klausur wird eine Einlesezeit von 10 Minuten gewährt. Während dieser Zeitdauer ist es Ihnen nicht gestattet, mit der Bearbeitung der Aufgaben zu beginnen.
60 Minuten Seite 1 Einlesezeit Für die Durchsicht der Klausur wird eine Einlesezeit von 10 Minuten gewährt. Während dieser Zeitdauer ist es Ihnen nicht gestattet, mit der Bearbeitung der Aufgaben zu beginnen.
BSc PRÜFUNGSBLOCK 2 / D-MAVT VORDIPLOMPRÜFUNG / D-MAVT. Musterlösung
 Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3..7 Arbeitszeit: 5 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 3..7 Arbeitszeit: 5 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3
Stellen Sie für das im folgenden Signalflussbild dargestellte dynamische System ein Zustandsraummodell K
 Aufgaben Aufgabe : Stellen Sie für das im folgenden Signalflussbild dargestellte dnamische Sstem ein Zustandsraummodell auf. u 2 7 5 Aufgabe 2: Wir betrachten das folgende Regelsstem vierter Ordnung: r
Aufgaben Aufgabe : Stellen Sie für das im folgenden Signalflussbild dargestellte dnamische Sstem ein Zustandsraummodell auf. u 2 7 5 Aufgabe 2: Wir betrachten das folgende Regelsstem vierter Ordnung: r
INSTITUT FÜR REGELUNGSTECHNIK
 Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
x 1 + u y 2 = 2 0 x 2 + 4u 2.
 3. Übung: gelkreis Aufgabe 3.. Gegeben sind die beiden linearen zeitkontinuierlichen Systeme 3 ẋ = 6 x + u 6 3 [ ] y = x (3.a) (3.b) und [ ] [ ] 8 ẋ = x + 6 4 [ ] y = x + 4u. u (3.a) (3.b) Berechnen Sie
3. Übung: gelkreis Aufgabe 3.. Gegeben sind die beiden linearen zeitkontinuierlichen Systeme 3 ẋ = 6 x + u 6 3 [ ] y = x (3.a) (3.b) und [ ] [ ] 8 ẋ = x + 6 4 [ ] y = x + 4u. u (3.a) (3.b) Berechnen Sie
Klausur im Fach: Regelungs- und Systemtechnik 1
 (in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
(in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
Schriftliche Prüfung aus Control Systems 1 am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Systems 1 am 24.11.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Prüfungsmodus: O VO+UE (TM) O VO (BM)
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1 Schriftliche Prüfung aus Control Systems 1 am 24.11.2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer: Prüfungsmodus: O VO+UE (TM) O VO (BM)
Zusammenfassung der 9. Vorlesung
 Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Labor RT Versuch RT1-1. Versuchsvorbereitung. Prof. Dr.-Ing. Gernot Freitag. FB: EuI, FH Darmstadt. Darmstadt, den
 Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Regelung. Roddeck, W.: Einführung in die Mechatronik; Teubner Verlag, 2. Auflage, 2003, Kapitel 7
 Regelung Die Regelung ist ein Vorgang, bei dem der vorgegebene Wert einer Größe fortlaufend durch Eingriff aufgrund von Messungen dieser Größe hergestellt und aufrechterhalten wird. Hierdurch entsteht
Regelung Die Regelung ist ein Vorgang, bei dem der vorgegebene Wert einer Größe fortlaufend durch Eingriff aufgrund von Messungen dieser Größe hergestellt und aufrechterhalten wird. Hierdurch entsteht
() 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)
 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)") Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.7.211 Arbeitszeit: 12 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.7.211 Arbeitszeit: 12 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik 1/3 Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am 06. 10. 2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer:
TU Graz, Institut für Regelungs- und Automatisierungstechnik 1/3 Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am 06. 10. 2014 Name / Vorname(n): Kennzahl / Matrikel-Nummer:
INSTITUT FÜR REGELUNGSTECHNIK
 Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Regelung einer Luft-Temperatur-Regelstrecke
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Autonome Mobile Systeme
 Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am..9 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4 erreichbare
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am..9 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 3 4 erreichbare
Reglerentwurf mit dem Frequenzkennlinienverfahren
 Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am.. Arbeitszeit: min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am.. Arbeitszeit: min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Vorlesung 3. Struktur Ofensystem
 Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear
Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear
Mehrgrößenregelung. Aufgabensammlung
 Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Fakultät für Elektrotechnik und Informationstechnik Professur Regelungstechnik und Systemdynamik Prof. Dr.-Ing. Stefan Streif Mehrgrößenregelung Aufgabensammlung Dr.-Ing. Arne-Jens Hempel M.Sc. Thomas
Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Vorstellung des Großen Belegs: Entwurf eines modellbasierten Regelungssystems für einen totzeitbehafteten
Seminarübungen: Dozent: PD Dr. Gunther Reißig Ort: 33/1201 Zeit: Mo Uhr (Beginn )
") Vorlesung : Dozent: Professor Ferdinand Svaricek Ort: 33/040 Zeit: Do 5.00 6.30Uhr Seminarübungen: Dozent: PD Dr. Gunther Reißig Ort: 33/20 Zeit: Mo 5.00 6.30 Uhr (Beginn 8.0.206 Vorlesungsskript: https://www.unibw.de/lrt5/institut/lehre/vorlesung/rt_skript.pdf
Vorlesung : Dozent: Professor Ferdinand Svaricek Ort: 33/040 Zeit: Do 5.00 6.30Uhr Seminarübungen: Dozent: PD Dr. Gunther Reißig Ort: 33/20 Zeit: Mo 5.00 6.30 Uhr (Beginn 8.0.206 Vorlesungsskript: https://www.unibw.de/lrt5/institut/lehre/vorlesung/rt_skript.pdf
Regelungstechnik I. Heinz JUnbehauen. Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme. 3., durchgesehene Auflage
 Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Automatisierungstechnik 1
 Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
Frequenzgangmessung, Entwurf eines PID-Reglers nach dem Frequenzkennlinienverfahren
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Frequenzgangmessung, Entwurf
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Frequenzgangmessung, Entwurf
Lösungen zur 7. Übung
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Vladislav Nenchev M.Sc. Arne Passon Dipl.-Ing. Thomas Seel Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 10.12.2010 Arbeitszeit: 120 min Name: Vorname(n): Matrikelnummer:
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 10.12.2010 Arbeitszeit: 120 min Name: Vorname(n): Matrikelnummer:
Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am
 TU Graz, Institut für Regelungs- und Automatisierungstechnik Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am..9 Name / Vorname(n): Kennzahl/ Matrikel-Nummer.: erreichbare
TU Graz, Institut für Regelungs- und Automatisierungstechnik Schriftliche Prüfung aus Nichtlineare elektrische Systeme Teil: Dourdoumas am..9 Name / Vorname(n): Kennzahl/ Matrikel-Nummer.: erreichbare
Optimierung von Regelkreisen. mit P-, PI und PID Reglern
 mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
Klausur. Grundlagen der Mechatronik
 21.02.2011 Klausur Grundlagen der Mechatronik Name: Matrikel-Nr.: Hinweise zur Bearbeitung: Die Klausur besteht aus 4 Aufgaben. Es sind alle Aufgaben zu bearbeiten. Die Bearbeitungszeit beträgt 120 Minuten.
21.02.2011 Klausur Grundlagen der Mechatronik Name: Matrikel-Nr.: Hinweise zur Bearbeitung: Die Klausur besteht aus 4 Aufgaben. Es sind alle Aufgaben zu bearbeiten. Die Bearbeitungszeit beträgt 120 Minuten.
Bestimmung der Reglerparameter aus den Frequenzkennlinien
 1 Kapitel Bestimmung der Reglerparameter aus den Frequenzkennlinien Mit PSPICE lassen sich die Frequenzgänge der Amplitude und der Phase von Regelkreisen simulieren, graphisch darstellen und mit zwei Cursors
1 Kapitel Bestimmung der Reglerparameter aus den Frequenzkennlinien Mit PSPICE lassen sich die Frequenzgänge der Amplitude und der Phase von Regelkreisen simulieren, graphisch darstellen und mit zwei Cursors
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik FH Jena
 Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Übung Systemtheorie und Regelungstechnik I - WS08/09 Übungstermin 1 am Universität des Saarlandes
 Übung Systemtheorie und Regelungstechnik I - WS08/09 Übungstermin 1 am 22.11.2008 Universität des Saarlandes Aufgabe 1.1: Gegeben ist der schematische Aufbau eines Mischers: Auf den Antriebsstrang Antriebsstrang
Übung Systemtheorie und Regelungstechnik I - WS08/09 Übungstermin 1 am 22.11.2008 Universität des Saarlandes Aufgabe 1.1: Gegeben ist der schematische Aufbau eines Mischers: Auf den Antriebsstrang Antriebsstrang
Regelungstechnik I (WS 12/13) Klausur ( )
 Klausur ( )") Regelungstechnik I (WS 12/13) Klausur (05.03.2013) Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Name: Matrikelnummer: Bitte beachten Sie: a) Diese Klausur enthält 4 Aufgaben auf den
Regelungstechnik I (WS 12/13) Klausur (05.03.2013) Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Name: Matrikelnummer: Bitte beachten Sie: a) Diese Klausur enthält 4 Aufgaben auf den
A. Modellierung: Standardstrecken anhand der Gleichstrommaschine
 Bewegungssteuerung durch geregelte elektrische Antriebe Übung 1 (WS17/18) Alle Abbildungen und Übungsunterlagen (Einführungsfolien, Übungsblätter, Musterlösungen, MATLAB-Übungen/Lösungen und Formelsammlung)
Bewegungssteuerung durch geregelte elektrische Antriebe Übung 1 (WS17/18) Alle Abbildungen und Übungsunterlagen (Einführungsfolien, Übungsblätter, Musterlösungen, MATLAB-Übungen/Lösungen und Formelsammlung)
Regelungs- und Systemtechnik 1 - Übung 6 Sommer 2016
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Regelungs- und Systemtechnik - Übung 6 Sommer 26 Vorbereitung Wiederholen Sie Vorlesungs- und Übungsinhalte zu folgenden Themen: Zeitkonstantenform
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Regelungs- und Systemtechnik - Übung 6 Sommer 26 Vorbereitung Wiederholen Sie Vorlesungs- und Übungsinhalte zu folgenden Themen: Zeitkonstantenform
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 26.2.21 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 2 3 4 erreichbare
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 26.2.21 Name: Vorname(n): Matrikelnummer: Note: Aufgabe 1 2 3 4 erreichbare
Ausarbeitung Regelungstechnik
 Ausarbeitung Regelungstechnik by Poth & Fiechtner 2005 by Poth & Fiechtner Seite 1/14 Inhalt Grundsätzliches zur Regelungstechnik Untersuchung des als Regelstrecke verwendeten Heizlüfters Regelkreis als
Ausarbeitung Regelungstechnik by Poth & Fiechtner 2005 by Poth & Fiechtner Seite 1/14 Inhalt Grundsätzliches zur Regelungstechnik Untersuchung des als Regelstrecke verwendeten Heizlüfters Regelkreis als
Regelungs- und Systemtechnik 1 - Übung 6 Sommer 2016
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Regelungs- und Systemtechnik - Übung 6 Sommer 26 Vorbereitung Wiederholen Sie Vorlesungs- und Übungsinhalte zu folgenden Themen: Standardregelkreis
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Regelungs- und Systemtechnik - Übung 6 Sommer 26 Vorbereitung Wiederholen Sie Vorlesungs- und Übungsinhalte zu folgenden Themen: Standardregelkreis
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Dies ist der letzte Termin in diesem Jahr 17.12.2004 fällt aus Nächste Termine: 14.1., 28.1.,
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Dies ist der letzte Termin in diesem Jahr 17.12.2004 fällt aus Nächste Termine: 14.1., 28.1.,
Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover
 Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover Zulassungsjahr: (Sommersemester) Allgemeine Informationen: Der deutschsprachige
Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover Zulassungsjahr: (Sommersemester) Allgemeine Informationen: Der deutschsprachige
Bachelorprüfung MM I 15. Oktober Vorname: Name: Matrikelnummer:
 Institut für Mechatronische Systeme Prof. Dr.-Ing. S. Rinderknecht Erreichbare Punktzahl: 40 Bearbeitungszeit: 60 Min Prüfung Maschinenelemente & Mechatronik I 15. Oktober 2010 Rechenteil Name: Matr. Nr.:...
Institut für Mechatronische Systeme Prof. Dr.-Ing. S. Rinderknecht Erreichbare Punktzahl: 40 Bearbeitungszeit: 60 Min Prüfung Maschinenelemente & Mechatronik I 15. Oktober 2010 Rechenteil Name: Matr. Nr.:...
Regelungstechnik. Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder. i c =C du dt. Zustands.- und Ausgangsgleichungen:
 Regelungstechnik Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder Energiespeicher: Zustandsgröße: Kondensator Spannung i c C du Zustands.- und Ausgangsgleichungen: Aus den Knoten:
Regelungstechnik Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder Energiespeicher: Zustandsgröße: Kondensator Spannung i c C du Zustands.- und Ausgangsgleichungen: Aus den Knoten:
Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover
 Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover Zulassungsjahr: 2007 Allgemeine Informationen: Der deutschsprachige Eingangstest
Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover Zulassungsjahr: 2007 Allgemeine Informationen: Der deutschsprachige Eingangstest
Grundkurs der Regelungstechnik
 Grundkurs der Regelungstechnik Einführung in die praktischen und theoretischen Methoden von Dr.-Ing. Ludwig Merz em. o. Professor und Direktor des Instituts für Meßund Regelungstechnik der Technischen
Grundkurs der Regelungstechnik Einführung in die praktischen und theoretischen Methoden von Dr.-Ing. Ludwig Merz em. o. Professor und Direktor des Instituts für Meßund Regelungstechnik der Technischen
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Alexander Schaefer 1 Inhalt Was ist Regelungstechnik? Modellbildung Steuerung Anwendungsbeispiel Regelung Reglertypen 2 Was ist Regelungstechnik? Ingenieurwissenschaft
Einführung in die Regelungstechnik Alexander Schaefer 1 Inhalt Was ist Regelungstechnik? Modellbildung Steuerung Anwendungsbeispiel Regelung Reglertypen 2 Was ist Regelungstechnik? Ingenieurwissenschaft
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
4. Der geschlossene Regelkreis mit P-Strecke und P-Regler
 FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
1 Reglerentwurf nach dem Betragsoptimum
 Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Eingebettete Systeme
 Institut für Informatik Lehrstuhl für Eingebettete Systeme Prof. Dr. Uwe Brinkschulte Benjamin Betting Eingebettete Systeme 1. Aufgabe (Regelsystem) 3. Übungsblatt Lösungsvorschlag a) Das Fahrzeug kann
Institut für Informatik Lehrstuhl für Eingebettete Systeme Prof. Dr. Uwe Brinkschulte Benjamin Betting Eingebettete Systeme 1. Aufgabe (Regelsystem) 3. Übungsblatt Lösungsvorschlag a) Das Fahrzeug kann
Versuchsanleitung. Labor Mechatronik. Versuch DV_5 Regelkreis mit analogen Reglern. Labor Mechatronik Versuch BV-5 analoge Regelung
 Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Regelungstechnik 1. Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Übung 2 Einschwingvorgänge 2 Diode Linearisierung
 Universität Stuttgart Übung 2 Einschwingvorgänge 2 Diode Linearisierung Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Aufgabe 2.1
Universität Stuttgart Übung 2 Einschwingvorgänge 2 Diode Linearisierung Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Aufgabe 2.1
Übungsskript Regelungstechnik 2
 Seite 1 von 11 Universität Ulm, Institut für Mess-, Regel- und Mikrotechnik Prof. Dr.-Ing. Klaus Dietmayer / Seite 2 von 11 Aufgabe 1 : In dieser Aufgabe sollen zeitdiskrete Systeme untersucht werden.
Seite 1 von 11 Universität Ulm, Institut für Mess-, Regel- und Mikrotechnik Prof. Dr.-Ing. Klaus Dietmayer / Seite 2 von 11 Aufgabe 1 : In dieser Aufgabe sollen zeitdiskrete Systeme untersucht werden.
Probeklausur Signale + Systeme Kurs TIT09ITA
 Probeklausur Signale + Systeme Kurs TIT09ITA Dipl.-Ing. Andreas Ströder 13. Oktober 2010 Zugelassene Hilfsmittel: Alle außer Laptop/PC Die besten 4 Aufgaben werden gewertet. Dauer: 120 min 1 Aufgabe 1
Probeklausur Signale + Systeme Kurs TIT09ITA Dipl.-Ing. Andreas Ströder 13. Oktober 2010 Zugelassene Hilfsmittel: Alle außer Laptop/PC Die besten 4 Aufgaben werden gewertet. Dauer: 120 min 1 Aufgabe 1
G R. Vorlesung 9. Identifiziert durch Sprungantwort. Sinnvoll selbst gestalten. Regler. Einschleifiger Regelkreis: Xd(s) W(s) Y(s) U(s) GFeder S
 W(s) Y(s) U(s) GFeder S") Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Synthese durch Rechner-Optimierung
 4.2.4. Synthese durch Rechner-Optimierung Möglichkeiten zum Finden passender Reglerparameter: 1. Theoretische Synthese (Herleitung der optimalen Werte) 2. Einstellregeln Messungen an der Strecke (z. B.
4.2.4. Synthese durch Rechner-Optimierung Möglichkeiten zum Finden passender Reglerparameter: 1. Theoretische Synthese (Herleitung der optimalen Werte) 2. Einstellregeln Messungen an der Strecke (z. B.
Diplomhauptprüfung / Masterprüfung
 Diplomhauptprüfung / Masterprüfung "Regelung linearer Mehrgrößensysteme" 6. März 2009 Aufgabenblätter Die Lösungen sowie der vollständige und nachvollziehbare Lösungsweg sind in die dafür vorgesehenen
Diplomhauptprüfung / Masterprüfung "Regelung linearer Mehrgrößensysteme" 6. März 2009 Aufgabenblätter Die Lösungen sowie der vollständige und nachvollziehbare Lösungsweg sind in die dafür vorgesehenen
FACHHOCHSCHULE KÖLN FAKULTÄT IME NT BEREICH REGELUNGSTECHNIK PROF. DR. H.M. SCHAEDEL / PROF. DR. R. BARTZ. RT - Praktikum. Thema des Versuchs :
 FACHHOCHSCHULE KÖLN FAKULTÄT IME NT BEREICH REGELUNGSTECHNIK PROF. DR. H.M. SCHAEDEL / PROF. DR. R. BARTZ Gruppe: RT - Praktikum Thema des Versuchs : Analyse von Ausgleichsstrecken höherer Ordnung im Zeit-
FACHHOCHSCHULE KÖLN FAKULTÄT IME NT BEREICH REGELUNGSTECHNIK PROF. DR. H.M. SCHAEDEL / PROF. DR. R. BARTZ Gruppe: RT - Praktikum Thema des Versuchs : Analyse von Ausgleichsstrecken höherer Ordnung im Zeit-
Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION
 Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION 1 LABORRICHTLINIEN 2 EINFÜHRUNG 3 PROZESS-STRUKTUR UND -DATEN 4 VERSUCHSVORBEREITUNG 5 VERSUCHSDURCHFÜHRUNG 6 DOKUMENTATION
Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION 1 LABORRICHTLINIEN 2 EINFÜHRUNG 3 PROZESS-STRUKTUR UND -DATEN 4 VERSUCHSVORBEREITUNG 5 VERSUCHSDURCHFÜHRUNG 6 DOKUMENTATION
3. Übung zur Vorlesung Steuer- und Regelungstechnik
 3. Übung zur Vorlesung Steuer- und Regelungstechnik Linearisierung Felix Goßmann M.Sc. Institut für Steuer- und Regelungstechnik Fakultät für Luft- und Raumfahrttechnik Universität der Bundeswehr München
3. Übung zur Vorlesung Steuer- und Regelungstechnik Linearisierung Felix Goßmann M.Sc. Institut für Steuer- und Regelungstechnik Fakultät für Luft- und Raumfahrttechnik Universität der Bundeswehr München
Regelungstechnik Aufgaben
 Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Bearbeitungszeit: 120 Min
 4 6 Fachgebiet gelungstechnik Leiter: Prof. Dr.-Ing. Johann ger gelungs- und Systemtechnik - Übungsklausur 9 Bearbeitungszeit: Min Modalitäten Es sind keine Hilfsmittel zugelassen. Bitte schreiben Sie
4 6 Fachgebiet gelungstechnik Leiter: Prof. Dr.-Ing. Johann ger gelungs- und Systemtechnik - Übungsklausur 9 Bearbeitungszeit: Min Modalitäten Es sind keine Hilfsmittel zugelassen. Bitte schreiben Sie
Praktikum Grundlagen Regelungstechnik
 Praktikum Grundlagen Regelungstechnik Versuch P-GRT 01 Versuchsziel Versuch 1 Füllstandsregelung Analyse und Optimierung unterschiedlicher Regelstrecken Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Praktikum Grundlagen Regelungstechnik Versuch P-GRT 01 Versuchsziel Versuch 1 Füllstandsregelung Analyse und Optimierung unterschiedlicher Regelstrecken Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
^ Springer Vieweg. Regelungstechnik 1. Systemtheoretische Grundlagen, Analyse. und Entwurf einschleifiger Regelungen. 10., aktualisierte Auflage
 Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen 10., aktualisierte Auflage mit 419 Abbildungen, 75 Beispielen, 172 Übungsaufgaben sowie einer Einführung
Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen 10., aktualisierte Auflage mit 419 Abbildungen, 75 Beispielen, 172 Übungsaufgaben sowie einer Einführung
Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis. Wintersemester 2014 Prof. Dr.-Ing. habil. Klaus-Peter Döge
 Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis Wintersemester 04 Prof. Dr.-Ing. habil. Klaus-Peter Döge Regelkreis nach DIN 96 Teil 5 Vereinfachter Regelkreis 3 Einführendes Beispiel
Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis Wintersemester 04 Prof. Dr.-Ing. habil. Klaus-Peter Döge Regelkreis nach DIN 96 Teil 5 Vereinfachter Regelkreis 3 Einführendes Beispiel
Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover
 Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover Zulassungsjahr: 04 (Sommersemester) Allgemeine Informationen: Der deutschsprachige
Zulassungsprüfung für den Master-Studiengang in Elektrotechnik und Informationstechnik an der Leibniz Universität Hannover Zulassungsjahr: 04 (Sommersemester) Allgemeine Informationen: Der deutschsprachige
Übungsaufgaben zu Mathematik III (ohne Lösungen)
") Übungsaufgaben zu Mathematik III (ohne Lösungen) 1. Lösen Sie intuitiv (d.h. ohne spezielle Verfahren) die folgenden DGLn (allgemeine Lösung): = b) =! c) = d)!! = e at. Prüfen Sie, ob die gegebenen Funktionen
Übungsaufgaben zu Mathematik III (ohne Lösungen) 1. Lösen Sie intuitiv (d.h. ohne spezielle Verfahren) die folgenden DGLn (allgemeine Lösung): = b) =! c) = d)!! = e at. Prüfen Sie, ob die gegebenen Funktionen
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Umdruck RT: Grundlagen der Regelungstechnik. 1 Grundbegriffe der Steuerungs- und Regelungstechnik. 1.2 Regelung
 Universität Stuttgart Institut für Leistungselektronik und lektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.2 Regelung ÜBUG ZU LKRISCH RGICHIK II Umdruck R: Grundlagen der Regelungstechnik Grundbegriffe
Universität Stuttgart Institut für Leistungselektronik und lektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.2 Regelung ÜBUG ZU LKRISCH RGICHIK II Umdruck R: Grundlagen der Regelungstechnik Grundbegriffe
1. Laborpraktikum. Abbildung 1: Gleichstrommotor Quanser QET
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Stephanie Geist Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Lehrveranstaltung Grundlagen der Regelungstechnik
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Stephanie Geist Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Lehrveranstaltung Grundlagen der Regelungstechnik
Übungsaufgaben Mathematik 3 ASW Blatt 8 Lineare Differentialgleichungen 1. und 2. Ordnung mit konstanten Koeffizienten
 Übungsaufgaben Mathematik 3 ASW Blatt 8 Lineare Differentialgleichungen und Ordnung mit konstanten Koeffizienten Prof Dr BGrabowski Lösung linearer Dgl Ordnung mittels Zerlegungssatz Aufgabe ) Lösen Sie
Übungsaufgaben Mathematik 3 ASW Blatt 8 Lineare Differentialgleichungen und Ordnung mit konstanten Koeffizienten Prof Dr BGrabowski Lösung linearer Dgl Ordnung mittels Zerlegungssatz Aufgabe ) Lösen Sie
Regelung. Max Meiswinkel. 8. Dezember Max Meiswinkel () Regelung 8. Dezember / 12
 Regelung 8. Dezember / 12") Regelung Max Meiswinkel 8. Dezember 2008 Max Meiswinkel () Regelung 8. Dezember 2008 1 / 12 Übersicht 1 Einführung Der Regelkreis Regelschleife 2 stetige Regelung P-Regler I-Regler PI-Regler PD-Regler
Regelung Max Meiswinkel 8. Dezember 2008 Max Meiswinkel () Regelung 8. Dezember 2008 1 / 12 Übersicht 1 Einführung Der Regelkreis Regelschleife 2 stetige Regelung P-Regler I-Regler PI-Regler PD-Regler
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler.
 Ziel des vierten Versuchs: Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler. 4. Berechnung, Simulation und Messung des Frequenzgangs einer I-Strecke F R (s) F S (s)
Ziel des vierten Versuchs: Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler. 4. Berechnung, Simulation und Messung des Frequenzgangs einer I-Strecke F R (s) F S (s)
14 Übungen zu Regelung im Zustandsraum Teil 2
 Zoltán Zomotor Versionsstand: 9. März 25, :32 This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3. Germany License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3./de/
Zoltán Zomotor Versionsstand: 9. März 25, :32 This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3. Germany License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3./de/
Linearisierung. Vorlesung 4. Realität: nichtlinear. Wunsch: Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) A=F(Y)
 A=F(Y)") Realität: nichtlinear Y AF(Y) A Wunsch: im Betriebspunkt linear Y K A Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) 1 Beispiel für Nichtlineare Systemkomponente: Ventil in
Realität: nichtlinear Y AF(Y) A Wunsch: im Betriebspunkt linear Y K A Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) 1 Beispiel für Nichtlineare Systemkomponente: Ventil in
Regelungstechnik I (WS 13/14) Klausur ( )
 Klausur ( )") Regelungstechnik I (WS 13/14) Klausur (13.03.2014) Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Name: Matrikelnummer: Bitte beachten Sie: a) Diese Klausur enthält 4 Aufgaben auf den
Regelungstechnik I (WS 13/14) Klausur (13.03.2014) Prof. Dr. Ing. habil. Thomas Meurer Lehrstuhl für Regelungstechnik Name: Matrikelnummer: Bitte beachten Sie: a) Diese Klausur enthält 4 Aufgaben auf den