Zusammenstellung wichtiger Vorlesungsfolien aus SRT für die weiterführenden RT-Veranstaltungen (Januar 2014)
|
|
|
- Erna Böhm
- vor 6 Jahren
- Abrufe
Transkript
 Aufbau eines ranskoninenalen Telefonnezesmi4 KanälenimJahr923 durch AT&T Problem: Verzerrungen zerrungenin in Reihenschal- ungenvon Röhrenversärker rkerdurch Nichlineariäen enund")

1 Zusammensellung wichiger Vorlesungsfolien aus SRT für die weierführenden RT-Veransalungen (Januar 24) Negaive Feedback Amplifier Harold S. Black ( ) Aufbau eines ranskoninenalen Telefonnezesmi4 KanälenimJahr923 durch AT&T Problem: Verzerrungen zerrungenin in Reihenschal- ungenvon Röhrenversärker rkerdurch Nichlineariäen enund Versärkungsänderungen. Lösung: Negaive Feedback Amplifier Paen eingereich 928 Versärker rker werden ab93 eingesez Paen ereil 937 rkungs- Negaive Feedback Amplifier Versärker mi negaiver Rückführung u - y K = u Für V k Widersand Widersand kv >> folg: y V = + kv y V K = u kv y y y(+ kv) = Vu = V(u ky) = Vu kvy = k Versärkung rkung des des rrück- geführen Versärkers rkers Definiion: Dynamisches Sysem Bezeichnungen und Definiionen (2) Ein Ein dynamischessysem sell eine Funkionseinhei zur zur Verarbeiungund und Überragungvon Signalen dar, dar, wobei die die Sysemeingangsgrößen en als als Ursache und und die die Sysemausgangsgrößenals als deren zeilicheauswirkungen zueinander in in Relaion gebrach werden. (Unbehauen (Unbehauen 2) 2)
 Bezeichnungen und Definiionen (4) Raumemperaurregelung Fenser auf Regelsrecke Regelgröß öße: Größ öße, die unabhängig")
2 Thermomeer als dynamisches Sysem Bezeichnungen und Definiionen (3) L (Kapillarfüllung) T Thermomeer L T (Umgebungsemperaur) Eingangsgröße: Innere Größen: Ausgangsgröße: Temperaur T Quecksilberemperaur, Quecksilbervolumen Kapillarfüllung llung L (Skalenanzeige) Bezeichnungen und Definiionen (4) Raumemperaurregelung Fenser auf Regelsrecke Regelgröß öße: Größ öße, die unabhängig ngig von äußeren Einflüssen auf einem gewünschen, fesen oder veränder nder- lichen Wer gehalen werden soll. Sörgr rgröße: Jede auf eine Rege- lung einwirkende Größ öße, die die beabsichige Beeinflussung der Regelung behinder. Sellglied: Ein am Eingang der Srecke liegendes Glied zur Venil Beeinflussung eines Energie oder Mengensromes. Raumemperaur Regler: Gerä zur Erfassung der Differenz zwischen Iswer und Sollwer der Regelgröße und zur Beäigung des Sellgliedes. Sollemperaur Führungsgröße: Größ öße, die der Regeleinrichung von außen zugeführ wird und der die Regelgröß öße e folgen soll Spannung Sellgröß öße: Größe, durch deren Änderung die Regelgröße beeinfluß werden kann. Mi der Sellgröße wird der Energie und/oder Maerialfluß in die Regelsrecke beeinfluß. Black Bo Konzep Konzenraion auf das d Wesenliche Focus auf Überragungsverhalen Informaionen werden verseck Verschiedene Absrakionsebenen Beschreibung mi Hilfe von Blockschalbildern (MIT 948) 2

 Sellglied Dampfvenil Drehzahl Regelsrecke Dampfurbine Meßglied Fliehkrafpendel Drehzahl (gemessen)")
3 Blockschalbild Das Das Blockschalbild (oder der der Signalflußplan) is is ein ein Signalflußdiagrammzur Darsellung des des Signalflusses und und des des Wirkungszusammenhangs in in einem Regelkreis. Mi Mi Hilfe des des Blockschalbildes wird eine eine von von allen echnischen Deails absrahieredarsellung des des Regelungsproblems gewonnen. Elemenare Elemene Überragungsglied (allgemein) Signalverzweigung (u = u 2 = u 3 ) Nichlineares Überragungsglied Summaionsselle (u 3 = u + u 2 ) Blockschalbild (4) Beispiel: Dampfurbine Sörungen Venilsellung Solldrehzahl Regelabweichung - Regler Dampffluß Fliehkrafregler (Hebelverhälnis) Sellglied Dampfvenil Drehzahl Regelsrecke Dampfurbine Meßglied Fliehkrafpendel Drehzahl (gemessen) Rückführung mußder Änderung der Drehzahl engegenwirken Drehzahl kleiner Dampffluß größ ößer Beispiel: Feder-Dämpfer mpfer-masse-schwinger Zusammenhang zwischen u() u() und und y() y() wird wird durch durch folgende DGL DGL beschrieben: m m && y() + y() & + y() = u() c d 3
 & + y() = u() c d c c c && y() + y() & + y() = u() d m m c m c c c && y() = y() & y() + u() d m m Beispiel: Feder-Dämpfer mpfer-masse-schwinger (3) Schri 2: 2: Aufsellen der")
4 Beispiel: Feder-Dämpfer mpfer-masse-schwinger (2) Lösen einer Differenialgleichung mi mi Hilfe eines Analogrechners Schri : : Auflösen der Differenialgleichung nach der höchsen h Ableiung m m && y() + y() & + y() = u() c d c c c && y() + y() & + y() = u() d m m c m c c c && y() = y() & y() + u() d m m Beispiel: Feder-Dämpfer mpfer-masse-schwinger (3) Schri 2: 2: Aufsellen der Analogrechnerschalung u c m - - y&& Inegraor y& Inegraor y c d c m Beispiel: Feder-Dämpfer mpfer-masse-schwinger (4) Simulink-Modell u y&& y& y Simulaionsergebnis für für m =,, c =,, d = 4
5 Grundsrukur einer Regelung Führungsgröße w() Sörungen Regelabweichung z() Sellgröße Regelgröße e() u() y() - Regler Regelsrecke Rückkopplung Sörgröße z 2 () Führungsgröße Regeldifferenz Sellgröße Sörgröße z () (Versorungssörung) (Lassörung) Regelgröße w() e() Regler u() Regelsrecke y() Sörgr rgrößen- und Folgeregelung Eine Regelung kann verschiedene Ziele verfolgen: Veränderung der dynamischeneigenschafen eines Sysems(Sabilisierung, Dämpfung, D Schnelligkei, Robushei). Ausgleichen von Sörungen (Raumheizung, Dampfurbine, Tempoma,, Körperemperaur, K...). Sörgrößenregelung ößenregelung Regelgröße e dem zeilichen Verlauf der Führungsgrößeanpassen (Werkzeugmaschinen, Nachführen hren von Anennen, Kurshalung,...). Folgeregelung Sörgr rgrößen- und Folgeregelungen (2) Sörgrößenregelung ößenregelung Besimme Größen eines Sysems, die die Regelgrößen, en,, sollen vorgegebene fese Sollwere einhalen, ohne daß daßdie die Sörungen, die die auf auf das das Sysem einwirken, von von nennenswerem Einfluß sind. Eine derarige Regelung wird als als Feswerregelung oder Sörgrößenregelung bezeichne. Versorgungssörung rung Lassörung z() z() y() y() Srecke - Srecke - u() Regler - w() = cons u() Regler Blockschalbilder Arbeispunk 5


 - e() Regler u() Srecke y() Blockschalbild Grundsrukur einer Seuerung z() Offene")

6 Sörgr rgrößen- und Folgeregelungen (3) Folgeregelung Ofmals müssen m die die Regelgrößen en eines Sysems sich sich den den ändernden Sollwerenmöglichs gu gu nachgeführ hr werden. Diese Regelungsar wird Folgeregelungoder oder Nachlaufregelunggenann. genann. In In diesem Fall Fall wird die die sich sich ändernde Sollgröße e reffender als als Führungsgröße bezeichne. w() - e() Regler u() Srecke y() Blockschalbild Grundsrukur einer Seuerung z() Offene Wirkungskee (feedforward( conrol, open loop conrol) Seuereinrichung erhäl keine Informaionen über Sörungen Dynamische Eigenschafen der Seuersrecke müssen m genau bekann sein Beispiele für f r Seuerungen Mikrowelle Abfüllauoma Roboerseuerungen Raumemperaurseuerung Nach- Nachabsenkung absenkung 6
7 Wann sind Regelungen nowendig? Gegenübersellung: Seuerung und Regelung Seuerung Offene Wirkungskee Die Srecke muß genau bekann sein Kann auf Sörungen nich reagieren Kein Soll-Is Is-Vergleich Keine Sensoren nowendig Sabiliä der Srecke wird nich veränder Regelung Geschlossener Regelkreis Wenn nich meßbare Sörungen auszu- gleichen sind. Wenn die Dynamik der Regelsrecke zu verändern is (Sabilisierung insabiler Sysem). Die Seuerungsaufgaben roz veränderer Eigenschafen der Regelsrecke zu erfüllen sind. Die Regelsrecke nich ausreichend genau bekann is. Die Srecke muß nich genau bekann sein (Robushei gegenüber Parameeränderungen) Kann Sörungen ausregeln (Sörkompensaion) Soll-Is Is-Vergleich Sensoren sind nowendig Der geschlossene Regelkreis kann insabil werden Modellbildung -- Modell der der Regelsrecke -- Modell der der GüeanforderungenG Analyse der Regelsrecke -- Sabiliä,, Dämpfung, D Seuer- und Beobachbarkei Auswahl der Reglersrukur -- Reglerordnung, Meß- und Sellgrößen en Feslegung der Reglerparameer Erprobung des Reglers in in der Simulaion z() Vorbereiungsphase -- Überprüfung der der Güeanforderungen G mi mi Malab/Simulink - u() Srecke? y() 7
8 Vorgehensweise bei Regelungsaufgaben Modellebene Modell der Regelsrecke Reglerenwurf Reglergesez Modellbildung Realisierung Prozeßebene Regelsrecke Fuzzy- Regelung Regler Modellbildung Analyisch:Aufsellen der der Sysemgleichungen uner Verwendung bekanner physikalischer und und /oder chemischer Geseze Modellierung im im Zeibereich Differenialgleichungen höherer Ordnung Zusandsraummodelle (Differenialgleichungen -er Ordnung) Modellierung im im Frequenzbereich Differenialgleichungen werden mi mi Hilfe der der Laplace- Transformaion zu zu algebraischen Gleichungen Überragungsfunkion Eperimenell:Messung der der Anwor der der Regelsrecke auf auf geeignee Tessignale Lineare Syseme Lineare Überragungsoperaion: y ( ) = Lu { ( )} Lineare Überragungsoperaion: 2. 8
9 Lineare Syseme (2) r r = 2 u ( ) = au ( ) + au ( ) 2 2 y Lu y ( ) = ay ( ) + a y ( ) 2 2 ( ) = { ( )} 2 = 2 y ( ) = Lu { ( )} y ( ) Lu { ( )} Im Im weieren wird vorausgesez, daßdas Verhalen der beracheen Syseme linear is is!!!! Lineare Syseme (2a) Linearisierung nichlinearer Syseme Voraussezungen Es werden nur kleineabweichungen um fese Arbeispunke berache. Die Were der Variablen am Arbeispunk werden durch den Inde gekennzeichne. Die Abweichungsgrößen en werden durch kleine Buchsaben gekennzeichne: y = Y Y = Y Y Unerscheidung: Linearisierung des saischen und dynamischen Verhalens. 9

10 Linearisierung nichlinearer Syseme (2) Linearisierung: Dynamisches Verhalen Linearisierung einer nichlinearendifferenialgleichung in in der Umgebung einer Ruhelagedurch Taylor-Reihenenwicklungund und Vernachlässigung der Terme höherer h herer Ordnung. Beispiel m L Φ && () + m g sin ( Φ ()) = F( ) (m L Φ&& ) ( m g sin( Φ) ) Φ() ϕ+ && ϕ = L Φ&& Φ m L Φ && () m Φ() mg F() Φ = Φ = ` m L ϕ+ && m g cos( Φ = ) ϕ = f = m L ϕ &&() + m g ϕ () = f() f Linearisierung nichlinearer Syseme (3) Linearisierung: Saisches Verhalen Linearisierung einer saischen Kennlinie: a) a) graphische Linearisierung b) b) analyische Linearisierung Seigung Seigung der der Tangene Tangene im im Arbeispunk. Arbeispunk. a) y Originalkoordinaen Y Y y AP u u Y Y + K ( U U ) Y Y K ( U U ) y u U U Lineare Koordinaen y = K u Linearisierung nichlinearer Syseme (4) a) a) Forsezung Der Der nichlineare Zusammenhang zwischen Ein- Ein-und Ausgang U Y wird wird durch durch die die lineare Beziehung im im Arbeispunk ersez. u K y Y K = U U is is die die Seigung der der Tangene im im Arbeispunk.
11 Modellierung mi Tessignalen: Sprungfunkion für < () = für u() () Definiion: Sprungfunkion () () (Einheissprungfunkion) Graphische Darsellung u() (- ) für < ( ) = für Zeiverschobene Sprungfunkion (- (- ) ) Tessignal Sprungfunkion (2) Einschalen von von Zeifunkionen durch (- (- ) ) Funkion u( ) = u ( kt) i k= u u ( ) Approimaion u u ( ) + u ( T) Approimaion beliebiger Funkionen T Sprunganwor 2.4 Sprungfunkion () () K = h( ) = lim h ( ) S Sysemversärkung Sprunganwor h() h()
12 Impulsfunkion und Impulsanwor für α Dirac scher Delaimpuls δ() δ() u() δ ( ) δ ( ) Recheckimpuls mi mi normierer Impulsfläche Symbolische Darsellung 2.5 Dirac scherdelaimpuls Delaimpuls δ() δ() Gewichsfunkion g() g() Dirac sche Delafunkion /2τ τ δ() -τ τ Die Die Delafunkion is is eine eine Disribuionoder oder verallgemeinere Funkion Ein Ein von von Null Null verschiedener Funkionswer ergib sich sich nichdurch Einsezen eines Argumenes, sondern durch eine eine Rechenvorschrif. Ausblendeigenschaf δ ()d = f() δ( )d = f( ) Ausblendeigenschaf des Delaimpulses Das Inegral über das Produkeiner Funkion f()mi dem Delaimpuls δ() ()blende alle Funkionswere bis bis auf f() aus: f ( ) δ ( d ) = f () δ ( ) f() Ausblendeigenschaf des verschobenen Delaimpulses: f ( ) δ ( ) d = f ( ) δ ( ) f() 2
13 Falungsinegral Definiion: Eigenschafen: Beschreib die Beziehung zwischen Eingangs-und Ausgangssignal im im Zeibereich. Besimmung des Ausgangssignals für f r beliebige Eingangssignale. Achung: is eine Konsane u() g ( ) Gewichsfunkion enhäl die die gesame Informaion über das dynamische Verhalen eines linearen Sysems. Modellbildung mi Hilfe von Differenialgleichungen Unerscheidung: Überragungsmodell (Klemmenmodell) Zusandsgröß ößenmodell (Zusandsmodell) Die Zusandsgrößen beschreiben den Energiegehal der im im Sysem enhalenen Speicherelemene. Beispiel: Feder-Dämpfer-Masse-Sysem Feder: Speicher für für poenielle Energie Masse: Speicher für für kineische Energie Zusandsmodell Sysem von Differenialgleichungen -er Ordnung 3
14 u u Technisches y Überragungssysem Modell des echnischen y Überragungssysems Beispiel: Pneumaischer Speicher? Druck, Volumen Speicherkapaziä Durchfluß Srömungs mungs- widersand Eingangsgröße: u() = p e () () q() = [p e() p()] W Ausgangsgröße: y() = p() p() & = q() CV Geseze: Durchfluß = Druckgefälle / / Srömungswidersand Druckänderung = Durchfluß / / Speicherkapaziä Beispiel: Pneumaischer Speicher (2) 3 m Pa Pa 3 / m s Proporionalüberragungsglied y() mi = p() Verzögerung (Zeikonsane). Ordnung u() = p e () PT -Sysem Anwendung der der Laplace-Transformaion TsY( s ) + Y( s) = U( s) Y( s)( Ts+ ) = U( s) Y( s) = U( s) + st / T L y ( ) = L U( s) + st y ( ) = = ( e ) ( ) s( + st) /sfür u() u() = () () Tabelle A.2, Korrespondenz 6 PT -Sysem Beispiel: Pneumaischer Speicher (3) T Zeikonsane Sprunganwor Gewichsfunkion 4
15 Beispiel: Mechanischer Schwinger Speicher für f für poenielle Energie F c Kräfegleichgewich F c = F m + F d F m Speicher für f für kineische Energie F d F = ( u y) c c F = my && m F = dy& d m d && y( ) + y& ( ) + y( ) = u( ) c c Beispiel: Mechanischer Schwinger (2) Normiere Differenialgleichung schwingungsfähiges higes PT 2 -Sysem Dämpfungsgrad ungedämpf kriisch gedämpf Eigenfrequenz der der unge- ungedämpfen Schwingung überkriisch gedämpf Sprunganwor Syseme ohne Ausgleich (I-Syseme) U() U() Füllsand einer Badewanne Zurückgeleger Weg einer Aufzugskabine 5
16 Syseme ohne Ausgleich (2) Beispiel: Füllsand F eines Beckens Mahemaische Beschreibung Seigung der der Sprunganwor = K I u I h h Sprunganwor M = Ci () Förderanrieb A I ω& () B ω() ω() PT PT -Sysem I-Syseme mi Verzögerung Zusammenhang zwischen i A i() A () und und ω() ω() I ω &() + B ω() Ci () = Zeikonsane T m = I/B I/B Sysemversärkung K S = S C/B C/B A B Zusammenhang zwischen i() i() und und y() y() Tm&& y() + y() & = K C I i A() = K i B A() T y() & + y() = K i ( τ) dτ m IT IT -Sysem A mi Ideales Ideales I-VerhalenI I-Verhalen y() = K I ω( τ)dτ bzw. ω () = & y() K y() & = K ω() I folg und I Definiion: Laplace-Transformiere Laplace-Transformaion Is f() ein Signal mi der Eigenschaf f() = für <, so laue die einseiige Laplace-Transformiere: s F(s) = f() e d Inegralransformaion Laplace-Operaor: s σ+ jω Korrespondenzzeichen Bezeichnungen: f() :: Originalfunkion, Zeibereich F(s) :: Bildfunkion, Bildbereich, Laplace-Bereich 6
 G(s) LT u() Y(s) = U(s) Y(s) ) und U(s) ) sind die Ein- und Ausgangsgröß ößen des Sysems im Bildbereich. Überragungsfunkion: Beispiel SRT, S.")
 ω G(s) = = U(s) s 2D s 2 2 2 + ω +ω Überragungsfunkion (3) Zusammenhang Gewichs-und Überragungsfunkion Die Überragungsfunkion G(s) ) läss l sich über die Gewichsfunkion g() durch die")
17 Überragungsfunkion Gegeben: Definiion: Überragungsfunkion Die Überragungsfunkion G(s) eines Sysems besimm sich über das Verhälnis der Laplace-Transformieren seiner Ein- und Ausgangssignale: { } { } LT y() G(s) LT u() Y(s) = U(s) Y(s) ) und U(s) ) sind die Ein- und Ausgangsgröß ößen des Sysems im Bildbereich. Überragungsfunkion: Beispiel SRT, S.49 2D && y( ) + y& ( ) + y( ) = u( ) ω ω 2 Anwendung des Differeniaionssazes auf && y( ) + 2 Dω y& ( ) + ω y( ) = ω u( ) 2 2 für && y() = y& () = y() = liefer: sy( s) + 2 Dω sy( s) + ω Y( s) = ωu( s) Y(s) ω G(s) = = U(s) s 2D s ω +ω Überragungsfunkion (3) Zusammenhang Gewichs-und Überragungsfunkion Die Überragungsfunkion G(s) ) läss l sich über die Gewichsfunkion g() durch die Laplace-Transformaion besimmen: s G(s) LT g() g() e d { } = = 7
.")
18 Anwendung des Falungssazes Reihenschalung zweier Syseme Lösung im im Zeibereich (Falungsinegral) Lösung im im Bildbereich (Falungssaz) Y (s) = G (s)u(s) Y(s) = G 2(s)Y (s) 2 = G (s)g (s)u(s) Falungssaz sell die die Grundlage der der Blockschalbildalgebradar (Tabelle 2.4). 2.4). Überragungsfunkion (4) Pole und Nullsellen Zähler und Nenner der Überragungsfunkion lassen sich in Linearfakoren (Fundamenalsaz der Algebra, Bronsein S. 576, SRT S.) zerlegen: Lösungen der Gleichung Z(s) ) = Z(s) = b + b s + L+ b s N(s) = a + a s + L+ a s m m n n n i : i : Nullsellen und und p i : i : Pole der der Überragungsfunkion G(s) G(s) m = b (s n ) m j j= n Lösungen der Gleichung N(s) ) = = a (s p ) n i= i Darsellungsformen b + b s + L+ b s G(s) = a a s a s m m + + L+ n n m ( s n j) bm j= G(s) = n an ( s pi) i= (Polynomform) (Pol-Nullsellen-Form) Überragungsfunkion (5) Das Das Pol-Nullsellen- Bild Bild beschreib eine eine Überragungsfunkion bis bis auf auf den den Fakor b m /a m /a n vollsändig n!!!! Pole Pole Pol- Pol-Nullsellen-Bild O O O Nullsellen 8
19 Überragungsfunkion: Realisierbarkei Für Grad Z(s) > Grad N(s)gil mi Grad Z (s) = n - Es reen ideal differenzierende Glieder auf! du( ) u( ) = sinω y( ) = = ω cosω d Ideales D-Glied D is echnisch nich realisierbar!!! Eigenschafen der Pole Pole und Nullsellen der Überragungsfunkion sind wichige Kenngrößen eines dynamischen Sysems. Die Eigenbewegung(Eigendynamik) eines dynamischen Sysems sez sich aus Eponenial- funkionene λ i i zusammen, deren Eponenen gerade den Polenensprechen ensprechen (λ (λ i =p i =p i ). i ). Haben sämliche s Pole negaivenrealeil, so so kling die Eigenbewegung ab, das Sysem is is sabil. Die Differenz n-mder Ordnungen des ZZähler-und Nennerpolynoms der Üfk.. wird Differenzgrad genann, und is is eine weiere wichige Kenngröße. e. Beispiel: ( s+ N) R R2 G( s) = = + ( s+ 2)( s+ 3) ( s+ 2) ( s + 3) Koeffizienenvergleich ( R + R2) s+ 3R + 2R2 = ( s+ 2)( s+ 3) Parialbruchzerlegung R + R 2= R = R 2 3R + 2R 2= N einsezen von R liefer: 3 3R2 + 2R 2= N R2 = N 3 N 2 3 N R 2= 3 N, R = N 2 G( s) = + ( s + 2) ( s + 3) Korresp. 3 in in Tabelle A.2: A.2: g() = (N 2)e + (3 N)e 2 3 9

20 PT-Sysem: Pole und Zeiverhalen PT -Sysem: Nullsellen: Keine Polselle: sp = T K G(s) = + st jω h() K Ein Ein Sysem reagier um um so so schneller, je je weier enfern sich sich ein ein Pol Pol von von der der Imaginärachse befinde. s p= -/T jω s p= -/T σ σ h() K T T PT2-Sysem: Pole und Zeiverhalen g() g() Zei Zei g() g() Zei Zei g() g() Zei Zei g() g() Zei Zei Pole und Eigenbewegungen jω s σ 2
21 Eigendynamik eines Sysems Die Die Eigendynamikbeschreib die die Eigenbewegung eines eines dynamischen Sysems, die die das das Sysem ohne ohne Erregung von von außen auf auf Grund Grund einer einer Anfangs- auslenkung ausführ. "Kurzer Hammerschlag" Sysem Überragungsfunkion G(s) Y(s) = G(s) Y(s) = G(s). {δ()} = G(s). = G(s) Korrespondenzabelle Nr. 34 Die Überragungsfunkion G(s) beschreib die Eigendynamik eines dynamischen Sysems!! Eigenschafen der Nullsellen Eine Nullselle n ii der Überragungsfunkion blockier die Überragung eines Signals u() ) = e ni ni mi der kompleen Frequenz n i. i. Die Nullsellen besimmen mi, mi welchem Gewich, die zu zu einem Pol λgehörende Eponenialfunkion e λ λ in in die Eigendynamik eingeh. Die Nullsellen der Überragungsfunkion haben keinen Einflußauf die Sabiliä des dynamischen Sysems. Die Nullsellen beeinflussen aber sehr wohl die Sabiliä des rückgekoppelen Sysems. Blockierung der Signalüberragung Gegeben sei die Überragungsfunkion s + G (s) = (s + 2)(s + 3) Eigenschafen der Nullsellen (2) Die Überragungsfunkion ha 2 Pole bei s = p = -22 und s = p 2 = -3 und eine Nullselle bei s = N = -. Das Eingangssignal u() = e N i = e - wird durch G(s) nich überragen: Y (s) = G (s) U (s) Tabelle A.2, Korrespondenz 3 s + = L (s + 2)(s + 3) { e } s + = (s + 2)(s + 3) s + = (s + 2)(s + 3) 2
22 Syseme mi Tozei Differenialgleichung Tozei Der Rechsverschiebungssaz (Tabelle A.) der Laplace- Transformaionliefer eine ranszendene Überragungsfk.: Beschreibung im Bildbereich: Zusammenfassung Beschreibung des Überragungsverhalens durch gebrochen raionale Funkionen (Überragungsfunkionen( berragungsfunkionen): Für r Syseme mi Tozei,, ri noch eine ranszendene Funkion auf: Das Nennerpolynom N(s) der Überragungsfunkion wird charakerisisches Polynom genann, da die Lösungen L (Pole( Pole) ) der charakerisischen Gleichung N(s) = die Eigenbewegungen des Sysems besimmen. Beschreibung im Bildbereich: Zusammenfassung Dami die Eigenbewegungen eines Sysems abklingen, müssen m alle Pole von G(s)negaive Realeile haben. Je größ ößerdie Beräge der Realeile der Polevon G(s)sind, sind, um so kleiner sind die zugehörigen, die Verzögerung besimmenden Zeikonsanen. Dich am Ursprung der s-ebene liegende Pole (große Zeikonsanen) haben einen dominierenden Einflußauf das Überragungsverhalen. Die Lage der Nullsellender Überragungsfunkion ha einen wesenlichen Einflußauf das Übergangsverhalen eines Sysems. 22

")

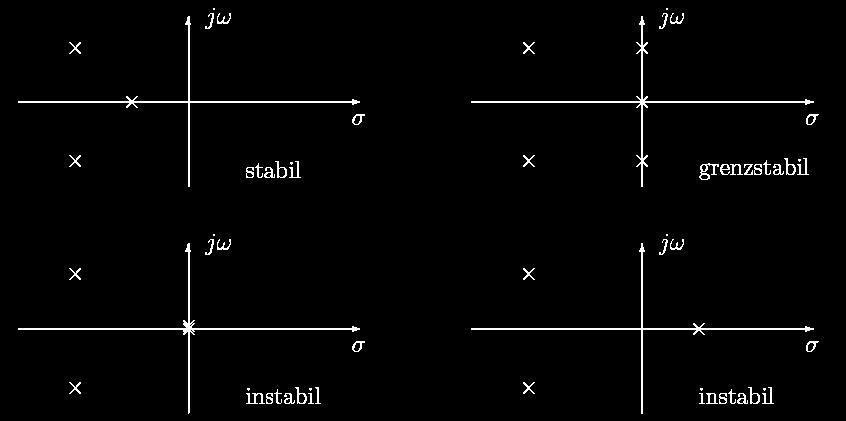
23 Sabiliä dynamischer Syseme Sabiliä dynamischer Syseme (2) Sabiliä dynamischer Syseme (4) 23
24 Beispiel für f r Insabiliä Doppelpol im im Ursprung ±() y () y 2 () ±() y () y 2 () Moivaion: Die Die Nullsellenbesimmung is is für ffür r Polynome Algebraische Sabiliäskrierien skrierien P(s) P(s) = a n s n s n n + a n- s n- s n- n a s s + a vom vom Grad n 4 im im allgemeinen nur nur numerisch möglich. Für Für r die die Sabiliäsanalyse sanalyse brauch man man die die genaue Lage der der Nullsellen nich zu zu kennen, sondern man man frag nur nur danach, ob ob alle alle le Nullsellen von von P( P( s) s) in in der der linken s-halbebene s liegen (ein (ein solches Polynom P( P( s) s) nenn man man sabil bzw. ein ein Hurwiz-Polynom). Hurwiz-Krierium (895) Nowendige Bedingung: Alle Alle Koeffizienen des des Polynoms P(s) P(s) müssen vorhanden sein sein und und das das gleiche Vorzeichen besizen. Sind Sind diese Bedingungen nich erfüll, so so is is P(s) P(s) kein kein Hurwiz-Poynom. Hurwiz-Krierium Hurwiz-Krierium Hinreichende Bedingung: H a = > n H 2 a a n n 3 = > a a n n 2 a a a n n n 3 5 H = a a a > 3 n n 2 n 4 a a n n 3 24
 P(s)is ein ein Hurwiz-Polynom!")
25 Hurwiz-Krierium (2) Beispiel: Gegeben sei das Polynom P s s s s 3 2 ( ) = Nowendige Bedingung is is erfüll, da da alle alle a i i vorhanden und und posiiv sind. a = a = n n 3 6 a = a = n 2 4 a = a = n 2 2 a = a = 3 Berechnung der Haupdeerminanen: an an 3 4 H = an = 4> H2 = = 2 > a a 6 2 = n n 2 Das Das Polynom P(s) P(s)is ein ein Hurwiz-Polynom!! 4 Berechnung von von H n is n is nich nowendig: 6 2 H 3 = = 2 4 H = 2 > Pol-Nullsellen Nullsellen-Kompensaion Die Die Überragungseigenschafen eines dynamischen Sysems können k durch eine eine Pol-Nullsellen-Kompensaion(Seuerung) ) veränder werden: Sysem reagier schneller s+ a G S(s) = G K (s) = G(s) = G S(s) G K(s) = s + a s + b s + b Voraussezungen: Die Die Srecke (Lage der der zu zu kompensierenden Pole) muß bekann sein. Eine Polkompensaion is is nur nur in in der der linken s-halbebene, also also für ffür sabile Pole möglich. Sandardregelkreis Sörgr rgröße Führungsgröße Regelgröß öße Meßrauschen Rückf Rückführung aufgeschnien aufgeschnien (offen) (offen) Überragungsfunkion G (s) (s) des des offenen Regelkreises für ffür z=w=r=: Y (s) = G (s)g (s)y (s) = G (s)y (s) a R S e G (s) = :G R (s)g S(s) e 25
26 Führungsüberragungsfunkion W(s) Führungsgröße Definiion: E(s) - G R (s) G S (s) Y(s) G (s) Regelgröß öße Y(s) = G (s) E(s) = G (s)[w(s) Y(s)] Die Die Führungsüberragungsfunkion G W (s) (s) gib gib die die Wirkung der der Führungsgröße W(s) auf auf die die Regelgröße Y(s) Y(s) an. an. Für FFür r den den Sandard-Regelkreis berechne sie sie sich sich durch: Y(s)[ + G (s)] = G (s)w(s) Führungsverhalen: Y(s) = G (s) W(s) W Regelungsaufgabe: Y(s) : W(s) = w G (s) = Definiion: - Sörüberragungsfunkion Sörgr rgröße Z(s) Regelgröß öße G R (s) G S (s) Y(s) Y(s) = Z(s) G (s) Y(s) G (s) Y(s)[ + G (s)] = Z(s) Mi Mi der der Sörüberragungsfunkion G z (s) z (s) lassen sich sich die die Wirkungen der der eernen Sörungen Z(s) Z(s) auf auf die die Regelgröße Y(s) Y(s) berechnen. Für FFür r den den Sandard-Regelkreis laue sie: sie: Sörverhalen: Y(s) = G (s) Z(s) Regelungsaufgabe: Y(s): z = z G (s) = Sandardregelkreis(2) Sörgr rgröße Führungsgröße Regelgröß öße Rückf Rückführung geschlossen geschlossen Meßrauschen Zielkonflik 26
27 PT2-Sysem (komplee Pole) Differenialgleichung: Überragungsfunkion: Pole: Aus Aus s + 2Dωs + ω = folg folg s,2 = Dω ± ( Dω) ω s = ( Dω ) + ω ( D ) = ω 2 2 2,2 = Dω ± Für D < ergib sich: 2 ω D ω 2 s,2 = Dω ± jω D Dω cosϕ = Für D = ergib sich: s = s2 = ω = D ω und für f D = :,2 s = ± jω Definiion: Saionäres Verhalen des Regelkreises Die bleibende Regelabweichung e sell die Abweichung zwischen Führungs- und Regelgröße bzw. Sör- und Regelgröße im im saionären Verhalen nach einem angelegen Eingangssignal dar. Führungsverhalen w() Regelkreis y() Bleibende Regelabweichung Ideales Verhalen Reales Verhalen Sörverhalen z() y() Übergangsverhalen Saionäres Verhalen Ohne Regler Regelkreis Bleibende Regelabweichung Reales Verhalen Ideales Verhalen Bleibende Regelabweichung: Führungsverhalen F W(s) Führungsgröße Bleibende Regelabweichung - ( ) e = lim e() = lim w() y() W(s) = s s E(s) ( Y(s) ) = lim s W(s) G (s) = lim s W(s) W(s) s + G (s) = lim sw(s) s + G (s) G R (s) G S (s) Y(s) G (s) G (s) Regelgröß öße G (s) Y(s) = W(s) + G (s) + G (s) G (s) = lim = lim s s + G + (s) G (s) 27
28 Bleibende Regelabweichung Bleibende Regelabweichung: Sörverhalen e = lim e() = lim y() = lim sy(s) s = lim s Z(s) s + G (s) = E(s) lim s + G (s) - G R (s) G S (s) Y(s) G (s) Sörgr rgröße Z(s) Z(s) = s Regelgröß öße Y(s) = Z(s) + G (s) Der Der Berag der der bleibenden Regelabweichung is is in in beiden Fällen F gleich groß und und von von G (s)für s (Versärkung rkung des des offenen Kreises) abhängig. Saionäre Regelgüe: Fehleraren Ordnung Zeisignal Bildfunkion Signalform Fehlerar - Regelgüe ~ () ~ s w() z() Regelfehler.Ordnung Lagefehler 2 ~ () ~ s 2 w() z() Regelfehler 2. Ordnung Geschwindigkeisfehler 3 ~ 2 () ~ s 3 w() z() Regelfehler 3. Ordnung Beschleunigungsfehler Saionäre Regelgüe K b + b s + b s + L + b s 2 m 2 m = l 2 n l s a + a s + a2 s + L + an l s G (s) P-Regler an einer Srecke mi Ausgleich bewirk eine bleibende Regelabweichung!! I-Regler an einer Srecke mi Ausgleich regel sprungförmige rmige Anregungen vollsändig aus!!!! Die Die saionäre Regelgüe is is sowohl von von der der Ar Ar der der Anre- gungals als auch vom Verhalen des des offenen Sysems abhängig. 28
29 Sysemversärkung rkung Syseme mi Ausgleich h() K K = h( ) = lim h ( ) s = lim sh( s) = lim sg( su ) ( s) s = lim sg( s) =G() s s Syseme ohne Ausgleich K + β s + β s + L + β s G (s) 2 m 2 m = l 2 n l s + α s + α2 s + L + αn l s 2 n l Der Der saionäre Endwer der der Über Übergangsfunkionh()gib gib das das saische Versärkungsverhälnis rkungsverhälnis eines eines Sysems wieder und und wird wird als als Sysemversärkung rkung K bezeichne. Wenn der proporionale Überragungs- aneil 2 m + β s + β2 s + L + βm s K s s 2 s n l + α + α + L + α nur Pole in der linken s-halbebene ha, dann is K der Endwer der Übergangs- funkion dieses Terms. Diese Diese Versärkung Versärkung rkung K des des proporionalen proporionalen Überragungsaneil besimm besimm das das saionäre saionäre Verhalen Verhalen des des Regelkreise Regelkreise (vgl. (vgl. Skrip Skrip SRT, SRT, Tabelle Tabelle 3.) 3.) und und wird wird auch auch bei bei Sysemen Sysemen ohne ohne Ausgleich Ausgleich als als Sysem- Sysemversärkung(Versärkung rkung(vers rkung des des offenen offenen versärkung Sysems) Sysems) bezeichne. bezeichne. Regelkreisenwurf (2) Anforderungen an an den geschlossenen Regelkreis ) ) Als Als Mindesanforderung muß der der Regelkreis sabil sein. 2) 2) Die Die Sörgröße öße z()soll einen möglichs m geringen Einflußauf G die die Regelgröße y() y() haben. G W = ( + G )( + G ) = : 3) 3) Die Die Regelgröße y() y()soll einer zeilich sich sich verändernden Führungsgröße w() w() möglichs genau und und schnell folgen. 4) 4) Der Der Regelkreis soll soll möglichs m unempfindlich gegenüber nich zu zu großen Parameeränderungen sein. Nominalgröß Nominalgröße öße Akuelle Akuelle Größ Größe öße Regelkreisenwurf (3) Die Anforderungen 2 44 können k mi G (s) = G S(s) G R (s) sehr große Regler- versärkung rkungnowendig erfüll werden. Beliebig große e RRückführversärkungen rkungen sind in in der der Prais aus aus diesen Gründen nich zu zu realisieren: Dynamisches Verhalen des des Sellgliedes ((Sellgrößen- enbeschränkung), Zu Zu große e Belasung der der Regelsrecke, Versärkung rkung des des Schwingungsverhalens oder sogar Verlus der der Sabiliä.. 29
30 Regelkreisenwurf (4) Güemaße e im Zeibereich: Führungsverhalen h(),9 Überschwingweie e ma Toleranzbereich 2 ε bleibende Regelabweichung e( ) Überschwingzei T m Ausregelzei T ε Ansiegszei T a Anregelzei T an Regelkreisenwurf (5) Güemaße e im Zeibereich: Sörverhalen Toleranzbereich Toleranzbereich 2 εε Ausregelzei Ausregelzei T ε ε bleibende Regelabweichung e( ) Regelkreisenwurf (7) Inegralkrierien y() y() 3
31 Regelkreisenwurf (8) Inegralkrierien (2) Einsellung eines PID-Reglers Ein PID-Regler beseh aus einer Parallelschalung eines P-,, I-und I D-Gliedes: D Nachsellzei Vorhalezei K R.T D 4T D < T I Ta = 2TD q + ( )2 2TD TI TD = Tb 2TD q ( )2 2TD TI TD Einsellung eines PID-Reglers (2) st D G R (s) = K R ( + + ) sti + Ts D-Aneil D-Aneil.δ() I-Aneil I-Aneil P-Aneil P-Aneil Sprunganwor Sprunganwor des des idealen idealen PID-Reglers PID-Reglers Sprunganwor Sprunganwor des des realisierbaren realisierbaren PID-Reglers PID-Reglers Die Die NachsellzeiT NachsellzeiT I u R I() = K is I is die die Zei, Zei,, die die vergehen vergehen muß, muß, dami dami die die Sprunganwor Sprunganwor des des I-I T I- I Aneils Aneils den den Wer Wer erreichen erreichen kann, kann,, den den der der P-Aneil P-Aneil beim beim Sprung Sprung sofor sofor erreich. erreich. u () = K Die Die VorhalezeiT VorhalezeiT D is D is die die Zei, Zei,, die die vergehen vergehen muß, muß, dami dami die die Rampenanwor Rampenanwor des des P-P P- Aneils Aneils den den Wer Wer erreichen erreichen kann, kann,, den den der der D-Aneil D-Aneil bei bei einer einer Rampe Rampe sofor sofor erreich. erreich. u D () = K R TD P R 3
32 Wirkungsweise des PID-Reglers Einsellung eines PID-Reglers (3) P-Aneil: I-Aneil: Je Je größer die die Regelabweichung e(),, deso größer is is der der P-Aneil in in der der Sellgröße u(). u(). P-Aneil reagier auf auf den den momenanen Wer der der Regelabweichung. Berücksichig nur nur die die Gegenwar. Inegrier die die Regelabweichung. Der Der I-Aneil I in in der der Sellgröße e wird wird so so lange größer, bis bis die die Regelabweichung zu zu Null Null geworden is. is. Daher kann er er bei bei sabilen Sysemen saionäre Genauigkei erzwingen. Da Da alle alle zurückliegende Were der der Regelabweichungen in in das das Inegral eingehen, berücksichig der der I-Aneil I die die Vergangenhei. Wirkungsweise des PID-Reglers Einsellung eines PID-Reglers (4) D-Aneil: Je Je größer die die Änderungsgeschwindigkei der der Regelab- weichung,, deso größer is is der der D-Aneil D in in der der Sellgröße. e. Dadurch verhinder der der D-Aneil, D daß daßsich große Regelabweichungen aufbauen können. k Seine Wirkung is is in in die die Zukunf geriche. Einsellung eines PID-Reglers (5) Einsellregeln nach Ziegler-Nichols Die Die von von Zieglerund Nichols* empirisch gefundenen Einsellungs- regeln liefern für ffür r viele Regelsrecken erse brauchbare Einsellungen für ffür r einen PID-Regler. Es werden zwei Verfahren unerschieden: I. I. Mehode des Sabiliäsrandes srandes II. II. Mehode der Übergangsfunkion *Ziegler, J. G.; Nichols, N. B.: Opimum seings for auomaic conrollers, Trans. ASME, 64 (942), pp ; 32
33 Mehode des Sabiliäsrandes srandes Einsellung eines PID-Reglers (6). Der Regelkreis wird mi Hilfe eines P Reglers geschlossen. 2. Die Reglerversärkung rkung wird solange erhöh, h, bis der geschlossene Kreis Dauerschwingungen ausführ. Die dabei eingeselle Reglerversärkung rkung wird als K Rkri bezeichne. 3. Anhand der Versärkung rkung K Rkri und der Periodendauer T kri der Dauerschwingung werden die Reglerparameer mi Hilfe der Tabelle 4.2 fesgeleg. Einsellung eines PID-Reglers (7) 4.2: Mehode der Übergangsfunkion Einsellung eines PID-Reglers (8).. Durch Eperimene mi mi der der Regelsrecke wird die die Übergangs- funkion besimm Die Die Übergangsfunkion wird durch die die Reihenschalung eines PT PT Gliedesund eines Tozeigliedesapproimier, indem die die saische Versärkung rkung K S, S, die die Verzugszei T u und u und die die Zeikonsane T besimm werden. h() PT n K S WP PT T Die Die Reglerparameer werden mi mi Hilfe der der Tabelle fesgeleg. T =T u T 33
Bildmaterial zur Vorlesung Regelungstechnik Teil I Die Regelstrecke. Wintersemester 2014 Prof. Dr.-Ing. habil. Klaus-Peter Döge
 Bildmaerial zur Vorlesung Regelungsechnik Teil I Die Regelsrecke Winersemeser 214 Prof. Dr.-Ing. habil. Klaus-Peer Döge 2 Regelung des Füllsandes eines Flüssigkeisbehälers mi Abfluss Sollwervorgabe Regler:
Bildmaerial zur Vorlesung Regelungsechnik Teil I Die Regelsrecke Winersemeser 214 Prof. Dr.-Ing. habil. Klaus-Peer Döge 2 Regelung des Füllsandes eines Flüssigkeisbehälers mi Abfluss Sollwervorgabe Regler:
Regelungstechnik. Steuerung. Regelung. Beim Steuern bewirkt eine Eingangsgröße eine gewünschte Ausgangsgröße (Die nicht auf den Eingang zurückwirkt.
 Regelungsechnik Seuerung Beim Seuern bewirk eine Eingangsgröße eine gewünsche Ausgangsgröße (Die nich auf den Eingang zurückwirk. Seuern is eine Wirkungskee Seuerkee (Eingahnsraße) Bsp. Boiler Regelung
Regelungsechnik Seuerung Beim Seuern bewirk eine Eingangsgröße eine gewünsche Ausgangsgröße (Die nich auf den Eingang zurückwirk. Seuern is eine Wirkungskee Seuerkee (Eingahnsraße) Bsp. Boiler Regelung
Prüfung zum Fach Regelungstechnik für Studierende Lehramt an beruflichen Schulen (Diplom/Bachelor)
") Technische Universiä München Lehrsuhl für Regelungsechnik Prof. Dr.-Ing. B. Lohmann Prüfung zum Fach Regelungsechnik 7.9. für Sudierende Lehram an beruflichen Schulen (Diplom/Bachelor) Name: Vorname: Mar.-Nr.
Technische Universiä München Lehrsuhl für Regelungsechnik Prof. Dr.-Ing. B. Lohmann Prüfung zum Fach Regelungsechnik 7.9. für Sudierende Lehram an beruflichen Schulen (Diplom/Bachelor) Name: Vorname: Mar.-Nr.
Prüfung zum Fach Regelungstechnik für Studierende Lehramt an beruflichen Schulen (Diplom/Bachelor)
") Technische Universiä München Lehrsuhl für Regelungsechnik Prof. Dr.-Ing. B. Lohmann Prüfung zum Fach Regelungsechnik 14.04.2011 für Sudierende Lehram an beruflichen Schulen (Diplom/Bachelor) Name: Vorname:
Technische Universiä München Lehrsuhl für Regelungsechnik Prof. Dr.-Ing. B. Lohmann Prüfung zum Fach Regelungsechnik 14.04.2011 für Sudierende Lehram an beruflichen Schulen (Diplom/Bachelor) Name: Vorname:
Laplacetransformation in der Technik
 Verallgemeinere Funkionen Laplaceransformaion in der echnik Fakulä Grundlagen Februar 26 Fakulä Grundlagen Laplaceransformaion in der echnik Übersich Verallgemeinere Funkionen Verallgemeinere Funkionen
Verallgemeinere Funkionen Laplaceransformaion in der echnik Fakulä Grundlagen Februar 26 Fakulä Grundlagen Laplaceransformaion in der echnik Übersich Verallgemeinere Funkionen Verallgemeinere Funkionen
Reglerdimensionierung nach Ziegler-Nichols
 HTL, Innsbruck Seie von 8 Rober Salvador salvador@hlinn.ac.a Mahemaische / Fachliche Inhale in Sichworen: Regelungsechnik, Laplaceransformaion, Umgang mi komplexen Zahlen, Kurvendiskussion, Differenzialgleichungen
HTL, Innsbruck Seie von 8 Rober Salvador salvador@hlinn.ac.a Mahemaische / Fachliche Inhale in Sichworen: Regelungsechnik, Laplaceransformaion, Umgang mi komplexen Zahlen, Kurvendiskussion, Differenzialgleichungen
Kleine Formelsammlung Regelungstechnik
 Kleine Formelsammlung Regelungsechnik von Birgi Seffenhagen. Auflage Kleine Formelsammlung Regelungsechnik Seffenhagen schnell und porofrei erhällich bei beck-shop.de DIE FACHBUCHHANDLUNG Hanser München
Kleine Formelsammlung Regelungsechnik von Birgi Seffenhagen. Auflage Kleine Formelsammlung Regelungsechnik Seffenhagen schnell und porofrei erhällich bei beck-shop.de DIE FACHBUCHHANDLUNG Hanser München
I-Strecken (Strecken ohne Ausgleich)
") FELJC 7_I-Srecken.o 1 I-Srecken (Srecken ohne Ausgleich) Woher der Name? Srecken ohne Ausgleich: Bei einem Sprung der Eingangsgrösse (Sellgrösse) nimm die Ausgangsgrösse seig zu, ohne einem fesen Endwer
FELJC 7_I-Srecken.o 1 I-Srecken (Srecken ohne Ausgleich) Woher der Name? Srecken ohne Ausgleich: Bei einem Sprung der Eingangsgrösse (Sellgrösse) nimm die Ausgangsgrösse seig zu, ohne einem fesen Endwer
Regelungstechnik 1 - Grundglieder: Analyse im Zeit und Frequenzbereich
 Regelungsechnik - Grundglieder: Analyse im Zei und Frequenzbereich Vorberachungen: Das Überragungsverhalen von linearen Regelkreiselemenen wird vorwiegend durch Sprunganworen bzw. Übergangsfunkionen sowie
Regelungsechnik - Grundglieder: Analyse im Zei und Frequenzbereich Vorberachungen: Das Überragungsverhalen von linearen Regelkreiselemenen wird vorwiegend durch Sprunganworen bzw. Übergangsfunkionen sowie
Zusammenfassung der 9. Vorlesung
 Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Typ A: Separierbare Differentialgleichungen I. Separierbare Differentialgleichungen II. Beispiel einer separierbaren Dgl
 Typ A: Separierbare Differenialgleichungen I Gegeben sei die Differenialgleichung y () = f () g(y) in einem Bereich D der (, y) Ebene. Gil g(y) 0, so lassen sich die Variablen und y rennen: y () g(y) =
Typ A: Separierbare Differenialgleichungen I Gegeben sei die Differenialgleichung y () = f () g(y) in einem Bereich D der (, y) Ebene. Gil g(y) 0, so lassen sich die Variablen und y rennen: y () g(y) =
Prof. Dr. Tatjana Lange. Lehrgebiet: Regelungstechnik Laborübung 04/05:
 Prof. Dr. ajana Lange Lehrgebie: egelungsechnik Laborübung 4/5: hema: Sreckenidenifikaion. Ermilung on egelkennweren aus dem offenen egelkreis. Übungsziele: Veriefung ausgewähler Mehoden der Sreckenidenifikaion
Prof. Dr. ajana Lange Lehrgebie: egelungsechnik Laborübung 4/5: hema: Sreckenidenifikaion. Ermilung on egelkennweren aus dem offenen egelkreis. Übungsziele: Veriefung ausgewähler Mehoden der Sreckenidenifikaion
Sensorik. Ziel: Messung physikalischer Größen durch Wandlung in elektrische Größen (i. d. R. Spannung) physikalische Messgröße
 physikalische Messgröße") Überblick Grundlagen: Spannung, Srom, Widersand, IV-Kennlinien Elekronische Messgeräe im Elekronikprakikum Passive Filer Signalranspor im Kabel Transisor Operaionsversärker Sensorik PID-Regler Lock-In-Versärker
Überblick Grundlagen: Spannung, Srom, Widersand, IV-Kennlinien Elekronische Messgeräe im Elekronikprakikum Passive Filer Signalranspor im Kabel Transisor Operaionsversärker Sensorik PID-Regler Lock-In-Versärker
Leseprobe. Ines Rennert, Bernhard Bundschuh. Signale und Systeme. Einführung in die Systemtheorie. ISBN (Buch):
:") Leseprobe Ines Renner, Bernhard Bundschuh Signale und Syseme Einführung in die Sysemheorie ISBN (Buch): 978-3-446-43327-4 ISBN (E-Book): 978-3-446-43328- Weiere Informaionen oder Besellungen uner hp://www.hanser-fachbuch.de/978-3-446-43327-4
Leseprobe Ines Renner, Bernhard Bundschuh Signale und Syseme Einführung in die Sysemheorie ISBN (Buch): 978-3-446-43327-4 ISBN (E-Book): 978-3-446-43328- Weiere Informaionen oder Besellungen uner hp://www.hanser-fachbuch.de/978-3-446-43327-4
Mathematische Methoden der klassischen Physik Zusammenfassung Differentialgleichungen
 Dr. G. Lechner Mahemaische Mehoden der klassischen Physik Zusammenfassung Differenialgleichungen In der Vorlesung wurden drei unerschiedliche Typen von Differenialgleichungen (DGL) besprochen, die jeweils
Dr. G. Lechner Mahemaische Mehoden der klassischen Physik Zusammenfassung Differenialgleichungen In der Vorlesung wurden drei unerschiedliche Typen von Differenialgleichungen (DGL) besprochen, die jeweils
Fourier- und Laplace- Transformation
 Skrium zur Vorlesung Mahemaik für Ingenieure Fourier- und Lalace- Transformaion Teil 3: Lalace-Transformaion Prof. Dr.-Ing. Norber Höner (nach einer Vorlage von Prof. Dr.-Ing. Torsen Benkner) Fachhochschule
Skrium zur Vorlesung Mahemaik für Ingenieure Fourier- und Lalace- Transformaion Teil 3: Lalace-Transformaion Prof. Dr.-Ing. Norber Höner (nach einer Vorlage von Prof. Dr.-Ing. Torsen Benkner) Fachhochschule
Gewöhnliche Differentialgleichungen (DGL)
") Gewöhnliche Differenialgleichungen (DGL) Einführende Beispiele und Definiion einer DGL Beispiel 1: 1. Die lineare Pendelbewegung eines Federschwingers führ uner Zuhilfenahme des Newonschen Krafgesezes
Gewöhnliche Differenialgleichungen (DGL) Einführende Beispiele und Definiion einer DGL Beispiel 1: 1. Die lineare Pendelbewegung eines Federschwingers führ uner Zuhilfenahme des Newonschen Krafgesezes
Mathematik III DGL der Technik
 Mahemaik III DGL der Technik Grundbegriffe: Differenialgleichung: Bedingung in der Form einer Gleichung in der Ableiungen der zu suchenden Funkion bis zu einer endlichen Ordnung aufreen. Funkions- und
Mahemaik III DGL der Technik Grundbegriffe: Differenialgleichung: Bedingung in der Form einer Gleichung in der Ableiungen der zu suchenden Funkion bis zu einer endlichen Ordnung aufreen. Funkions- und
Grundlagen der Nachrichtentechnik 1 Communications 1
 Grunlagen er Nachrichenechnik Communicaions Prof. Dr.-Ing. Anreas Czylwik S. Nachrichenechnik Organisaorisches Vorlesung SWS Übung SWS Bereuer: Dipl.-Ing. Thorsen Kempka Folienkopien sin verfügbar Prüfung:
Grunlagen er Nachrichenechnik Communicaions Prof. Dr.-Ing. Anreas Czylwik S. Nachrichenechnik Organisaorisches Vorlesung SWS Übung SWS Bereuer: Dipl.-Ing. Thorsen Kempka Folienkopien sin verfügbar Prüfung:
7 Erzwungene Schwingung bei Impulslasten
 Einmassenschwinger eil I.7 Impulslasen 53 7 Erzwungene Schwingung bei Impulslasen Impulslasen im echnischen Allag sind zum Beispiel Soß- oder Aufprallvorgänge oder Schläge. Die Las seig dabei in kurzer
Einmassenschwinger eil I.7 Impulslasen 53 7 Erzwungene Schwingung bei Impulslasen Impulslasen im echnischen Allag sind zum Beispiel Soß- oder Aufprallvorgänge oder Schläge. Die Las seig dabei in kurzer
Universität Ulm Samstag,
 Universiä Ulm Samsag, 5.6. Prof. Dr. W. Arend Robin Nika Sommersemeser Punkzahl: Lösungen Gewöhnliche Differenialgleichungen: Klausur. Besimmen Sie die Lösung (in möglichs einfacher Darsellung) folgender
Universiä Ulm Samsag, 5.6. Prof. Dr. W. Arend Robin Nika Sommersemeser Punkzahl: Lösungen Gewöhnliche Differenialgleichungen: Klausur. Besimmen Sie die Lösung (in möglichs einfacher Darsellung) folgender
lim t 0 s s s = lim G(s), (3.81) sofern die Grenzwerte der Übergangsfunktion existieren (d. h. insbesondere
, (3.81) sofern die Grenzwerte der Übergangsfunktion existieren (d. h. insbesondere") 62 Dynamisches Verhalen von Überragungsgliedern lich, die Pol- bzw. Nullsellen durch reuze bzw. reise in der komplexen s-ebene zu bezeichnen. Da Pol- und Nullsellen konsane komplexe Were sind, is die Lage
62 Dynamisches Verhalen von Überragungsgliedern lich, die Pol- bzw. Nullsellen durch reuze bzw. reise in der komplexen s-ebene zu bezeichnen. Da Pol- und Nullsellen konsane komplexe Were sind, is die Lage
Musterlösungen zur Klausur. Grundlagen der Regelungstechnik. vom
 Muserlösungen zur Klausur Grundlagen der Regelungsecni vom 4.9. Aufgabe : Linearisierung Pune A. Linearisierung des niclinearen Terms der Modellgleicungen, wobei und die üllsände im Gleicgewic sind. B.
Muserlösungen zur Klausur Grundlagen der Regelungsecni vom 4.9. Aufgabe : Linearisierung Pune A. Linearisierung des niclinearen Terms der Modellgleicungen, wobei und die üllsände im Gleicgewic sind. B.
Abituraufgaben Grundkurs 2009 Bayern Analysis I. dt mit D F = R.
 Abiuraufgaben Grundkurs 9 Bayern Analysis I I.). Die Abbildung zeig den Graphen G f einer ganzraionalen Funkion f drien Grades mi dem Definiionsbereich D f R. Die in der Abbildung angegebenen Punke P(
Abiuraufgaben Grundkurs 9 Bayern Analysis I I.). Die Abbildung zeig den Graphen G f einer ganzraionalen Funkion f drien Grades mi dem Definiionsbereich D f R. Die in der Abbildung angegebenen Punke P(
Abiturprüfung Mathematik 2009 (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe 1
 Berufliche Gymnasien ohne TG Analysis, Aufgabe 1") www.mahe-aufgaben.com Abiurprüfung Mahemaik 009 (Baden-Würemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe. (7 Punke) Das Schaubild P einer Polynomfunkion drien Grades ha den Wendepunk W(-/-) und
www.mahe-aufgaben.com Abiurprüfung Mahemaik 009 (Baden-Würemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe. (7 Punke) Das Schaubild P einer Polynomfunkion drien Grades ha den Wendepunk W(-/-) und
Grundlagen der Elektrotechnik 3
 Grundlagen der Elekroechnik 3 Kapiel 3. Schalvorgänge - Die aplace Transformaion Prof. Dr.-Ing. I. Willms Grundlagen der Elekroechnik 3 S. Fachgebie Nachrichenechnische Syseme 3.. Einführung Nuzung einer
Grundlagen der Elekroechnik 3 Kapiel 3. Schalvorgänge - Die aplace Transformaion Prof. Dr.-Ing. I. Willms Grundlagen der Elekroechnik 3 S. Fachgebie Nachrichenechnische Syseme 3.. Einführung Nuzung einer
Abiturprüfung 2017 ff Beispielaufgabe Grundkurs Mathematik; Analysis Beispiel Wirkstoff
 Die Bioverfügbarkei is eine Messgröße dafür, wie schnell und in welchem Umfang ein Arzneimiel resorbier wird und am Wirkor zur Verfügung seh. Zur Messung der Bioverfügbarkei wird die Wirksoffkonzenraion
Die Bioverfügbarkei is eine Messgröße dafür, wie schnell und in welchem Umfang ein Arzneimiel resorbier wird und am Wirkor zur Verfügung seh. Zur Messung der Bioverfügbarkei wird die Wirksoffkonzenraion
Masse, Kraft und Beschleunigung Masse:
 Masse, Kraf und Beschleunigung Masse: Sei 1889 is die Einhei der Masse wie folg fesgeleg: Das Kilogramm is die Einhei der Masse; es is gleich der Masse des Inernaionalen Kilogrammprooyps. Einzige Einhei
Masse, Kraf und Beschleunigung Masse: Sei 1889 is die Einhei der Masse wie folg fesgeleg: Das Kilogramm is die Einhei der Masse; es is gleich der Masse des Inernaionalen Kilogrammprooyps. Einzige Einhei
Kapitel : Exponentielles Wachstum
 Wachsumsprozesse Kapiel : Exponenielles Wachsum Die Grundbegriffe aus wachsum 1.xmcd werden auch hier verwende! Wir verwenden im Beispiel 2 auch fas die gleiche Angabe wie in Beispiel 1 - lediglich eine
Wachsumsprozesse Kapiel : Exponenielles Wachsum Die Grundbegriffe aus wachsum 1.xmcd werden auch hier verwende! Wir verwenden im Beispiel 2 auch fas die gleiche Angabe wie in Beispiel 1 - lediglich eine
Lösung Klausur. p(t) = (M + dm)v p(t + dt) = M(v + dv) + dm(v + dv u) Wir behalten nur die Terme der ersten Ordnung und erhalten.
 = (M + dm)v p(t + dt) = M(v + dv) + dm(v + dv u) Wir behalten nur die Terme der ersten Ordnung und erhalten.") T1 I. Theorieeil a) Zur Zei wird ein Pake der Masse dm mi der Geschwindigkei aus der Rakee ausgesoÿen. Newon's zweies Gesez läss sich schreiben als dp d = F p( + ) p() = F d = Av2 d Der Impuls des Sysems
T1 I. Theorieeil a) Zur Zei wird ein Pake der Masse dm mi der Geschwindigkei aus der Rakee ausgesoÿen. Newon's zweies Gesez läss sich schreiben als dp d = F p( + ) p() = F d = Av2 d Der Impuls des Sysems
Mathematische Methoden in den Ingenieurwissenschaften 4. Übungsblatt
 Prof Dr M Gerds Dr A Dreves J Michael Winerrimeser 6 Mahemaische Mehoden in den Ingenieurwissenschafen 4 Übungsbla Aufgabe 9 : Mehrmassenschwinger Berache wird ein schwingendes Sysem aus Körpern der Masse
Prof Dr M Gerds Dr A Dreves J Michael Winerrimeser 6 Mahemaische Mehoden in den Ingenieurwissenschafen 4 Übungsbla Aufgabe 9 : Mehrmassenschwinger Berache wird ein schwingendes Sysem aus Körpern der Masse
Lösungen der Übungsaufgaben zur Regelungstechnik
 Prof. Dr. R. essler, FH-arlsruhe, Sensorsysemechnik, C:\ro\Si05\RT3\Loes_Regechn_.doc, Seie Homepage hp://www.home.hs-karlsruhe.de/~kero000/ Lösungen der Übungsaufgaben zur Regelungsechnik Tex der Aufgabensellung:
Prof. Dr. R. essler, FH-arlsruhe, Sensorsysemechnik, C:\ro\Si05\RT3\Loes_Regechn_.doc, Seie Homepage hp://www.home.hs-karlsruhe.de/~kero000/ Lösungen der Übungsaufgaben zur Regelungsechnik Tex der Aufgabensellung:
Leistungselektronik Grundlagen und Standardanwendungen. Übung 3: Kommutierung
 Lehrsuhl für Elekrische Anriebssyseme und Leisungselekronik Technische Universiä München Arcissraße 1 D 8333 München Email: eal@ei.um.de Inerne: hp://www.eal.ei.um.de Prof. Dr.-Ing. Ralph Kennel Tel.:
Lehrsuhl für Elekrische Anriebssyseme und Leisungselekronik Technische Universiä München Arcissraße 1 D 8333 München Email: eal@ei.um.de Inerne: hp://www.eal.ei.um.de Prof. Dr.-Ing. Ralph Kennel Tel.:
MATLAB: Kapitel 4 Gewöhnliche Differentialgleichungen
 4. Einleiung Eine der herausragenden Särken von MATLAB is das numerische (näherungsweise) Auflösen von Differenialgleichungen. In diesem kurzen Kapiel werden wir uns mi einigen Funkionen zum Lösen von
4. Einleiung Eine der herausragenden Särken von MATLAB is das numerische (näherungsweise) Auflösen von Differenialgleichungen. In diesem kurzen Kapiel werden wir uns mi einigen Funkionen zum Lösen von
1. Signalbeschreibung im Zeitbereich
 . Signalbeschreibung im Zeibereich SiSy, Signal, - Inhalsverzeichnis. Signalklassen * Kapiel 3.4 (Energie und Leisung).2 Symmerie-Eigenschafen von Signalen.3 Verschiebung und Dehnung eines Zeisignals *
. Signalbeschreibung im Zeibereich SiSy, Signal, - Inhalsverzeichnis. Signalklassen * Kapiel 3.4 (Energie und Leisung).2 Symmerie-Eigenschafen von Signalen.3 Verschiebung und Dehnung eines Zeisignals *
Ganzrationale Funktionenscharen. 4. Grades. Umfangreiche Aufgaben. Lösungen ohne CAS und GTR. Alle Methoden ganz ausführlich. Datei Nr.
 Ganzraionale Funkionenscharen. Grades Umfangreiche Aufgaben Lösungen ohne CAS und GTR Alle Mehoden ganz ausführlich Daei Nr. 7 Sand 3. Sepember 06 FRIEDRICH W. BUCKEL INTERNETBIBLIOTHEK FÜR SCHULMATHEMATIK
Ganzraionale Funkionenscharen. Grades Umfangreiche Aufgaben Lösungen ohne CAS und GTR Alle Mehoden ganz ausführlich Daei Nr. 7 Sand 3. Sepember 06 FRIEDRICH W. BUCKEL INTERNETBIBLIOTHEK FÜR SCHULMATHEMATIK
Lösungen Test 2 Büro: Semester: 2
 Fachhochschule Nordwesschweiz (FHNW) Hochschule für Technik Insiu für Geises- und Naurwissenschaf Dozen: Roger Burkhard Klasse: Sudiengang ST Lösungen Tes Büro: 4.613 Semeser: Modul: MDS Daum: FS1 Bemerkungen:
Fachhochschule Nordwesschweiz (FHNW) Hochschule für Technik Insiu für Geises- und Naurwissenschaf Dozen: Roger Burkhard Klasse: Sudiengang ST Lösungen Tes Büro: 4.613 Semeser: Modul: MDS Daum: FS1 Bemerkungen:
III.2 Radioaktive Zerfallsreihen
 N.BORGHINI Version vom 5. November 14, 13:57 Kernphysik III. Radioakive Zerfallsreihen Das Produk eines radioakiven Zerfalls kann selbs insabil sein und späer zerfallen, und so weier, sodass ganze Zerfallsreihen
N.BORGHINI Version vom 5. November 14, 13:57 Kernphysik III. Radioakive Zerfallsreihen Das Produk eines radioakiven Zerfalls kann selbs insabil sein und späer zerfallen, und so weier, sodass ganze Zerfallsreihen
Diskrete Integratoren und Ihre Eigenschaften
 Diskree Inegraoren und Ihre Eigenschafen Whie Paper von Dipl.-Ing. Ingo Völlmecke Indusrielle eglersrukuren werden im Allgemeinen mi Hilfe von Inegraoren aufgebau. Aufgrund des analogen Schalungsaufbaus
Diskree Inegraoren und Ihre Eigenschafen Whie Paper von Dipl.-Ing. Ingo Völlmecke Indusrielle eglersrukuren werden im Allgemeinen mi Hilfe von Inegraoren aufgebau. Aufgrund des analogen Schalungsaufbaus
f ( x) = x + x + 1 (quadratische Funktion) f '( x) = x + (Ableitungsfunktion)
 = x + x + 1 (quadratische Funktion) f '( x) = x + (Ableitungsfunktion)") R. Brinkmann hp://brinkmann-du.de Seie.. Tangene und Normale Tangenenseigung Die Seigung eines Funkionsgraphen in einem Punk P ( f ( ) ) is gleichbedeuend mi der Seigung der Tangene in diesem Punk. Nachfolgend
R. Brinkmann hp://brinkmann-du.de Seie.. Tangene und Normale Tangenenseigung Die Seigung eines Funkionsgraphen in einem Punk P ( f ( ) ) is gleichbedeuend mi der Seigung der Tangene in diesem Punk. Nachfolgend
Zeitreihenökonometrie
 ifo Insiu für Wirschafsforschung an der Universiä München Zeireihenökonomerie Kapiel 6 Nichsaionäre univariae Zeireihenmodelle ifo Insiu für Wirschafsforschung an der Universiä München Nichsaionäre Prozesse
ifo Insiu für Wirschafsforschung an der Universiä München Zeireihenökonomerie Kapiel 6 Nichsaionäre univariae Zeireihenmodelle ifo Insiu für Wirschafsforschung an der Universiä München Nichsaionäre Prozesse
HINWEISE zur Identifikation einer Regelstrecke nach Versuchsdaten mit MATLAB
 Die Sprunganwor is der Seckbrief der Regelsrecke. S. Samal, W. Becker: Grundriß der prakischen Regelungsechnik, 0. Auflage, Verlag Oldenbourg, 000, Seie 104 HINWEISE zur Idenifikaion einer Regelsrecke
Die Sprunganwor is der Seckbrief der Regelsrecke. S. Samal, W. Becker: Grundriß der prakischen Regelungsechnik, 0. Auflage, Verlag Oldenbourg, 000, Seie 104 HINWEISE zur Idenifikaion einer Regelsrecke
Signal- und Systemtheorie for Dummies
 FB Eleroechni Ewas Signal- und Sysemheorie or Dummies Version - Juli Oh No!!!! Pro. Dr.-Ing. ajana Lange Fachhochschule Merseburg FB Eleroechni Pro. Dr.-Ing. ajana Lange Signal- und Sysemheorie or Dummies
FB Eleroechni Ewas Signal- und Sysemheorie or Dummies Version - Juli Oh No!!!! Pro. Dr.-Ing. ajana Lange Fachhochschule Merseburg FB Eleroechni Pro. Dr.-Ing. ajana Lange Signal- und Sysemheorie or Dummies
10. Wechselspannung Einleitung
 10.1 Einleiung In Sromnezen benuz man sa Gleichspannung eine sinusförmige Wechselspannung, uner anderem weil diese wesenlich leicher zu erzeugen is. Wie der Name es sag wechsel bei einer Wechselspannung
10.1 Einleiung In Sromnezen benuz man sa Gleichspannung eine sinusförmige Wechselspannung, uner anderem weil diese wesenlich leicher zu erzeugen is. Wie der Name es sag wechsel bei einer Wechselspannung
Name: Punkte: Note: Ø:
 Name: Punke: Noe: Ø: Kernfach Physik Abzüge für Darsellung: Rundung: 4. Klausur in K am 5. 5. 0 Ache auf die Darsellung und vergiss nich Geg., Ges., Formeln, Einheien, Rundung...! Angaben: e =,60 0-9 C
Name: Punke: Noe: Ø: Kernfach Physik Abzüge für Darsellung: Rundung: 4. Klausur in K am 5. 5. 0 Ache auf die Darsellung und vergiss nich Geg., Ges., Formeln, Einheien, Rundung...! Angaben: e =,60 0-9 C
13.1 Charakterisierung von Schwingungen
 87 Schwingungen reen in allen Fachgebieen mi rückgekoppelen Prozessen auf. Im Maschinenbau ensehen Schwingungen durch elasische Radaufhängungen, Maschinenfundamene oder Maschineneile, in der Elekroechnik
87 Schwingungen reen in allen Fachgebieen mi rückgekoppelen Prozessen auf. Im Maschinenbau ensehen Schwingungen durch elasische Radaufhängungen, Maschinenfundamene oder Maschineneile, in der Elekroechnik
Kontinuierliche Fourier Transformation
 Koninuierliche Fourier ransformaion f () is eine nichperiodische Funkion. Um die Frequenzen in einem beliebigen Zeisignal zu besimmen, inerpreieren wir die Funkion f () als periodische Funkion mi Periode.
Koninuierliche Fourier ransformaion f () is eine nichperiodische Funkion. Um die Frequenzen in einem beliebigen Zeisignal zu besimmen, inerpreieren wir die Funkion f () als periodische Funkion mi Periode.
Kapitel 2: Fourieranalyse. Analoge, nichtperiodische Signale
 ZHW, NTM, 2005/10, Rur 1 Kapiel 2: Fourieranalyse Analoge, nichperiodische Signale Inhalsverzeichnis 1. FOURIERTRANSFORMATION...1 2. EIGENSCHAFTEN DER FOURIERTRANSFORMATION...2 2.1. LINEARITÄT...2 2.2.
ZHW, NTM, 2005/10, Rur 1 Kapiel 2: Fourieranalyse Analoge, nichperiodische Signale Inhalsverzeichnis 1. FOURIERTRANSFORMATION...1 2. EIGENSCHAFTEN DER FOURIERTRANSFORMATION...2 2.1. LINEARITÄT...2 2.2.
3.4 Systeme linearer Differentialgleichungen
 58 Kapiel 3 Invarianen linearer Transformaionen 34 Syseme linearer Differenialgleichungen Die Unersuchung der Normalformen von Marizen soll nun auf die Lösung von Differenialgleichungssysemen angewende
58 Kapiel 3 Invarianen linearer Transformaionen 34 Syseme linearer Differenialgleichungen Die Unersuchung der Normalformen von Marizen soll nun auf die Lösung von Differenialgleichungssysemen angewende
Integralrechnung. Grundidee der Integralrechnung. Einführung des Riemann- Integrals
 1/8 Grundidee der Inegralrechnung Inegralrechnung Die Inegralrechnung is neben der Differenialrechnung der wichigse Zweig der Analysis. Sie is aus dem Problem der Flächen- und Volumenberechnung ensanden.
1/8 Grundidee der Inegralrechnung Inegralrechnung Die Inegralrechnung is neben der Differenialrechnung der wichigse Zweig der Analysis. Sie is aus dem Problem der Flächen- und Volumenberechnung ensanden.
Fachrichtung Mess- und Regelungstechniker
 Fachrichung Mess- und egelungsechniker 4.3.2.7-2 chüler Daum:. Tiel der L.E. : Digiale euerungsechnik 3 2. Fach / Klasse : Arbeiskunde, 3. Ausbildungsjahr 3. Themen der Unerrichsabschnie :. -Kippglied
Fachrichung Mess- und egelungsechniker 4.3.2.7-2 chüler Daum:. Tiel der L.E. : Digiale euerungsechnik 3 2. Fach / Klasse : Arbeiskunde, 3. Ausbildungsjahr 3. Themen der Unerrichsabschnie :. -Kippglied
Schwingungen g und Wellen II Wellen, Gedämpfte Schwingungen
 Physik A VL1 (7.11.1) Schwingngen g nd Wellen II Wellen, Gedämpfe Schwingngen Wellen Gedämpfe Schwingngen schwache Dämpfng aperiodischer Grenzfall Kriechfall 1 Ei Erinnerng: Beschreibng von Schwingngen
Physik A VL1 (7.11.1) Schwingngen g nd Wellen II Wellen, Gedämpfe Schwingngen Wellen Gedämpfe Schwingngen schwache Dämpfng aperiodischer Grenzfall Kriechfall 1 Ei Erinnerng: Beschreibng von Schwingngen
14 Kurven in Parameterdarstellung, Tangentenvektor und Bogenlänge
 Dr. Dirk Windelberg Leibniz Universiä Hannover Mahemaik für Ingenieure Mahemaik hp://www.windelberg.de/agq 14 Kurven in Parameerdarsellung, Tangenenvekor und Bogenlänge Aufgabe 14.1 (Tangenenvekor und
Dr. Dirk Windelberg Leibniz Universiä Hannover Mahemaik für Ingenieure Mahemaik hp://www.windelberg.de/agq 14 Kurven in Parameerdarsellung, Tangenenvekor und Bogenlänge Aufgabe 14.1 (Tangenenvekor und
Wechselspannung. Zeitlich veränderliche Spannung mit periodischer Wiederholung
 Elekrische Schwingungen und Wellen. Wechselsröme i. Wechselsromgrößen ii.wechselsromwidersand iii.verhalen von LC Kombinaionen. Elekrischer Schwingkreis 3. Elekromagneische Wellen Wechselspannung Zeilich
Elekrische Schwingungen und Wellen. Wechselsröme i. Wechselsromgrößen ii.wechselsromwidersand iii.verhalen von LC Kombinaionen. Elekrischer Schwingkreis 3. Elekromagneische Wellen Wechselspannung Zeilich
Operationsverstärker. Teil G: Operationsverstärker. Operationsverstärker 741. Operationsverstärker. 06 / Teil G / Seite 01
 Teil G: Operaionsversärker Wirkprinzip und charakerisische Kennwere Inverierender Spannungsversärker Differenzversärker Schmi-Trigger Addierender Versärker, inverierend Spizenwergleichricher Inegraor Differenzierer
Teil G: Operaionsversärker Wirkprinzip und charakerisische Kennwere Inverierender Spannungsversärker Differenzversärker Schmi-Trigger Addierender Versärker, inverierend Spizenwergleichricher Inegraor Differenzierer
Untersuchung von Gleitentladungen und deren Modellierung durch Funkengesetze im Vergleich zu Gasentladungen
 Unersuchung von Gleienladungen und deren Modellierung durch Funkengeseze im Vergleich zu Gasenladungen Dipl.-Ing. Luz Müller, Prof. Dr.-Ing. Kur Feser Insiu für Energieüberragung und Hochspannungsechnik,
Unersuchung von Gleienladungen und deren Modellierung durch Funkengeseze im Vergleich zu Gasenladungen Dipl.-Ing. Luz Müller, Prof. Dr.-Ing. Kur Feser Insiu für Energieüberragung und Hochspannungsechnik,
Kondensator und Spule im Gleichstromkreis
 E2 Kondensaor und Spule im Gleichsromkreis Es sollen experimenelle nersuchungen zu Ein- und Ausschalvorgängen bei Kapaziäen und ndukiviäen im Gleichsromkreis durchgeführ werden. Als Messgerä wird dabei
E2 Kondensaor und Spule im Gleichsromkreis Es sollen experimenelle nersuchungen zu Ein- und Ausschalvorgängen bei Kapaziäen und ndukiviäen im Gleichsromkreis durchgeführ werden. Als Messgerä wird dabei
Abiturprüfung Mathematik 2012 (Baden-Württemberg) Berufliche Gymnasien Analysis, Aufgabe 1
 Berufliche Gymnasien Analysis, Aufgabe 1") Abiurprüfung Mahemaik 0 (Baden-Würemberg) Berufliche Gymnasien Analysis, Aufgabe. (8 Punke) Die Abbildung zeig das Schaubild einer Funkion h mi der Definiionsmenge [-7 ; 4]. Die Funkion H is eine Sammfunkion
Abiurprüfung Mahemaik 0 (Baden-Würemberg) Berufliche Gymnasien Analysis, Aufgabe. (8 Punke) Die Abbildung zeig das Schaubild einer Funkion h mi der Definiionsmenge [-7 ; 4]. Die Funkion H is eine Sammfunkion
15 Erzwungene Schwingungen
 11 Unwuchen in elasischen Rooren oder Fahrbahnunebenheien bei Fahrzeugen führen auf erzwungene Schwingungen. Berache werden soll im Folgenden der Fall der Schwingungserregung durch eingepräge Kräfe. Bei
11 Unwuchen in elasischen Rooren oder Fahrbahnunebenheien bei Fahrzeugen führen auf erzwungene Schwingungen. Berache werden soll im Folgenden der Fall der Schwingungserregung durch eingepräge Kräfe. Bei
Einführung in gewöhnliche Differentialgleichungen
 Einführung in gewöhnliche Differenialgleichungen Jonahan Zinsl 25. Mai 202 Definiionen Definiion.(Gewöhnliche Differenialgleichung. Ordnung) Uner einer gewöhnlichen Differenialgleichung. Ordnung verseh
Einführung in gewöhnliche Differenialgleichungen Jonahan Zinsl 25. Mai 202 Definiionen Definiion.(Gewöhnliche Differenialgleichung. Ordnung) Uner einer gewöhnlichen Differenialgleichung. Ordnung verseh
Stammgruppe trifft sich zum Museumsrundgang Experte erklärt jeweils sein Plakat
 Fachag Mahemaik: Kurvenscharen Ablauf: 1. Sunde Gemeinsame Einsiegsaufgabe. Sunde Sammgruppenaufgaben Sammgruppen (a bis 6 Schüler) Jedes Gruppenmiglied erhäl eine unerschiedliche Aufgabe A, B, C, D in
Fachag Mahemaik: Kurvenscharen Ablauf: 1. Sunde Gemeinsame Einsiegsaufgabe. Sunde Sammgruppenaufgaben Sammgruppen (a bis 6 Schüler) Jedes Gruppenmiglied erhäl eine unerschiedliche Aufgabe A, B, C, D in
4. Kippschaltungen mit Komparatoren
 4. Kippschalungen mi Komparaoren 4. Komparaoren Wird der Operaionsversärker ohne Gegenkopplung berieben, so erhäl man einen Komparaor ohne Hserese. Seine Ausgangsspannung beräg: a max für > = a min für
4. Kippschalungen mi Komparaoren 4. Komparaoren Wird der Operaionsversärker ohne Gegenkopplung berieben, so erhäl man einen Komparaor ohne Hserese. Seine Ausgangsspannung beräg: a max für > = a min für
Regelungstechnik für den Praktiker. Manfred Schleicher
 Regelungsechnik für den Prakiker Manfred Schleicher Vorwor und Hinweise zum Inhal dieser Broschüre Bezüglich der Regelungsechnik is eine Vielzahl von Büchern und Abhandlungen erhällich, welche häufig
Regelungsechnik für den Prakiker Manfred Schleicher Vorwor und Hinweise zum Inhal dieser Broschüre Bezüglich der Regelungsechnik is eine Vielzahl von Büchern und Abhandlungen erhällich, welche häufig
3. Partielle Differentialgleichungen
 3.. Grundlagen und Klassifikaion Welche Ordnung haben diese Gleichungen?? 3.4.1 Lineare parielle Differenialgleichungen. Ordnung Analogie: Klassifikaion Kegelschnie 1 3.4.3 Korrek geselle Probleme Anfangs-
3.. Grundlagen und Klassifikaion Welche Ordnung haben diese Gleichungen?? 3.4.1 Lineare parielle Differenialgleichungen. Ordnung Analogie: Klassifikaion Kegelschnie 1 3.4.3 Korrek geselle Probleme Anfangs-
Struktur und Verhalten I
 Kapiel 9 Srukur und Verhalen I Ganz allgemein gesag is das Thema dieses Kurses die Ersellung, Simulaion und Unersuchung von Modellen räumlich homogener dynamischer Syseme aus Naur und Technik. Wir haben
Kapiel 9 Srukur und Verhalen I Ganz allgemein gesag is das Thema dieses Kurses die Ersellung, Simulaion und Unersuchung von Modellen räumlich homogener dynamischer Syseme aus Naur und Technik. Wir haben
Wiederholung Exponentialfunktion
 SEITE 1 VON 9 Wiederholung Eponenialfunkion VON HEINZ BÖER 1. Regeln und Beispiele Der Funkionserm Eponenialfunkionen haben die Form f() = b a. Die y-achse wird bei b geschnien, denn f(0) = 0 b a = b 1
SEITE 1 VON 9 Wiederholung Eponenialfunkion VON HEINZ BÖER 1. Regeln und Beispiele Der Funkionserm Eponenialfunkionen haben die Form f() = b a. Die y-achse wird bei b geschnien, denn f(0) = 0 b a = b 1
Motivation der Dierenzial- und Integralrechnung
 Moivaion der Dierenzial- und Inegralrechnung Fakulä Grundlagen Hochschule Esslingen SS 2010 4 3 2 1 0 5 10 15 20 25 30 Fakulä Grundlagen (Hochschule Esslingen) SS 2010 1 / 9 Übersich 1 Vorberachungen Ableiungsbegri
Moivaion der Dierenzial- und Inegralrechnung Fakulä Grundlagen Hochschule Esslingen SS 2010 4 3 2 1 0 5 10 15 20 25 30 Fakulä Grundlagen (Hochschule Esslingen) SS 2010 1 / 9 Übersich 1 Vorberachungen Ableiungsbegri
2.2 Dynamische Systeme und ihre Softwaremodelle
 2.2 Dynamische Syseme und ihre Sofwaremodelle Was wissen wir bis jez? Es exisier ein Prozess (absrahier als Sysem), der (das) über Akoren durch Signale beeinfluß werden kann und über Sensoren Signale über
2.2 Dynamische Syseme und ihre Sofwaremodelle Was wissen wir bis jez? Es exisier ein Prozess (absrahier als Sysem), der (das) über Akoren durch Signale beeinfluß werden kann und über Sensoren Signale über
1
 FELJC/GOERI@LTAM jean-claude.feles@educaion.lu 1 2. Regelsrecken Nich vergessen: Die Regelsrecke is der wichigse Teil des Regelkreises, denn sie is das Gerä, welches geregel werden soll. Es is also sehr
FELJC/GOERI@LTAM jean-claude.feles@educaion.lu 1 2. Regelsrecken Nich vergessen: Die Regelsrecke is der wichigse Teil des Regelkreises, denn sie is das Gerä, welches geregel werden soll. Es is also sehr
Zentrale schriftliche Abiturprüfungen im Fach Mathematik
 Zenrale schrifliche Abiurprüfungen im Fach Mahemaik Aufgabe 9: Radioakiver Zerfall Beim radioakiven Zerfall einer Subsanz S 1 beschreib m 1 () die Masse der noch nich zerfallenen Subsanz zum Zeipunk mi
Zenrale schrifliche Abiurprüfungen im Fach Mahemaik Aufgabe 9: Radioakiver Zerfall Beim radioakiven Zerfall einer Subsanz S 1 beschreib m 1 () die Masse der noch nich zerfallenen Subsanz zum Zeipunk mi
Exponential- und Logarithmusfunktionen
 . ) Personen, Personen bzw. Personen ) Ewas weniger als Minuen. (Nach,... Minuen sind genau Personen informier.) ) Ja. Bereis um : Uhr sind (heoreisch) Personen informier. ) Informiere Miarbeierinnen und
. ) Personen, Personen bzw. Personen ) Ewas weniger als Minuen. (Nach,... Minuen sind genau Personen informier.) ) Ja. Bereis um : Uhr sind (heoreisch) Personen informier. ) Informiere Miarbeierinnen und
Übungsserie: Single-Supply, Gleichrichter Dioden Anwendungen
 1. Mai 216 Elekronik 1 Marin Weisenhorn Übungsserie: Single-Supply, Gleichricher Dioden Anwendungen Aufgabe 1. Gleichricher In dieser Gleichricherschalung für die USA sei f = 6 Hz. Der Effekivwer der Ausgangspannung
1. Mai 216 Elekronik 1 Marin Weisenhorn Übungsserie: Single-Supply, Gleichricher Dioden Anwendungen Aufgabe 1. Gleichricher In dieser Gleichricherschalung für die USA sei f = 6 Hz. Der Effekivwer der Ausgangspannung
Ganzrationale Funktionen (Polynomfunktionen) - Berechnung von Nullstellen, Gleichungen höheren Grades -
 - Berechnung von Nullstellen, Gleichungen höheren Grades -") GS - 3.0.05 - gara_0_berechnenns.mcd Ganzraionale Funkionen (Polynomfunkionen) - Berechnung von, Gleichungen höheren Grades -. Gleichungen höheren Grades Gegeben is der Funkionserm f( ) a n n + a n n +...
GS - 3.0.05 - gara_0_berechnenns.mcd Ganzraionale Funkionen (Polynomfunkionen) - Berechnung von, Gleichungen höheren Grades -. Gleichungen höheren Grades Gegeben is der Funkionserm f( ) a n n + a n n +...
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
4. Quadratische Funktionen.
 4-1 Funkionen 4 Quadraische Funkionen 41 Skalierung, Nullsellen Eine quadraische Funkion is von der Form f() = c 2 + b + a mi reellen Zahlen a, b, c; is c 0, so sprechen wir von einer echen quadraischen
4-1 Funkionen 4 Quadraische Funkionen 41 Skalierung, Nullsellen Eine quadraische Funkion is von der Form f() = c 2 + b + a mi reellen Zahlen a, b, c; is c 0, so sprechen wir von einer echen quadraischen
Kennzeichnung stochastischer Prozesse
 . Kennzeichnung sochasischer Prozesse...1.0. Der Plaz der sochasischen Prozesse in der Regelungsechnik...1.1. Beschreibung sochasischer Prozesse im Zeibereich...3.1.1. Die Auokorrelaionsfunkion (AKF)...3.1..
. Kennzeichnung sochasischer Prozesse...1.0. Der Plaz der sochasischen Prozesse in der Regelungsechnik...1.1. Beschreibung sochasischer Prozesse im Zeibereich...3.1.1. Die Auokorrelaionsfunkion (AKF)...3.1..
Strömung im Rohr. Versuch: Inhaltsverzeichnis. Fachrichtung Physik. Physikalisches Grundpraktikum. 1 Aufgabenstellung 2
 Fachrichung Physik Physikalisches Grundprakikum Ersell: Bearbeie: Versuch: L. Jahn SR M. Kreller J. Kelling F. Lemke S. Majewsky i. A. Dr. Escher Akualisier: am 29. 03. 2010 Srömung im Rohr Inhalsverzeichnis
Fachrichung Physik Physikalisches Grundprakikum Ersell: Bearbeie: Versuch: L. Jahn SR M. Kreller J. Kelling F. Lemke S. Majewsky i. A. Dr. Escher Akualisier: am 29. 03. 2010 Srömung im Rohr Inhalsverzeichnis
Empirische Wirtschaftsforschung
 Empirische Wirschafsforschung Prof. Dr. Bernd Süßmuh Universiä Leipzig Insiu für Empirische Wirschafsforschung Volkswirschafslehre, insbesondere Ökonomerie 9.6. Zeireihen und Zeireihenmodelle Prinzipielle
Empirische Wirschafsforschung Prof. Dr. Bernd Süßmuh Universiä Leipzig Insiu für Empirische Wirschafsforschung Volkswirschafslehre, insbesondere Ökonomerie 9.6. Zeireihen und Zeireihenmodelle Prinzipielle
INSTITUT FÜR REGELUNGSTECHNIK
 Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Answers for infrastructure. Regeltechnik
 Answers for infrasrucure. Regelechnik Inhalsverzeichnis 1 Einführung in die Seuer- und Regelechnik... 6 1.1 Einleiung... 6 1.2 Seuern... 6 1.3 Regeln... 8 1.3.1 Prinzip der Regelung... 8 1.4 Regelkreis
Answers for infrasrucure. Regelechnik Inhalsverzeichnis 1 Einführung in die Seuer- und Regelechnik... 6 1.1 Einleiung... 6 1.2 Seuern... 6 1.3 Regeln... 8 1.3.1 Prinzip der Regelung... 8 1.4 Regelkreis
Kapitel 11 Produktion, Sparen und der Aufbau von Kapital
 apiel 11 Produkion, Sparen und der Aufbau von apial Vorbereie durch: Florian Barholomae / Sebasian Jauch / Angelika Sachs Die Wechselwirkung zwischen Produkion und apial Gesamwirschafliche Produkionsfunkion:
apiel 11 Produkion, Sparen und der Aufbau von apial Vorbereie durch: Florian Barholomae / Sebasian Jauch / Angelika Sachs Die Wechselwirkung zwischen Produkion und apial Gesamwirschafliche Produkionsfunkion:
1 Lokale Änderungsrate und Gesamtänderung
 Schülerbuchseie Lösungen vorläufig I Inegralrechnung Lokale Änderungsrae und Gesamänderung S. S. b h = m s ( s) + m s s + m s ( s) = 7 m Fläche = 7 FE a) s =, h km h +, h km h +, h km h +, h km h +,, h
Schülerbuchseie Lösungen vorläufig I Inegralrechnung Lokale Änderungsrae und Gesamänderung S. S. b h = m s ( s) + m s s + m s ( s) = 7 m Fläche = 7 FE a) s =, h km h +, h km h +, h km h +, h km h +,, h
GETE ELEKTRISCHES FELD: DER KONDENSATOR: Elektrische Feldstärke: E r. Hr. Houska Testtermine: und
 Schuljahr 22/23 GETE 3. ABN / 4. ABN GETE Tesermine: 22.1.22 und 17.12.2 Hr. Houska houska@aon.a EEKTRISCHES FED: Elekrisch geladene Körper üben aufeinander Kräfe aus. Gleichnamige geladene Körper sießen
Schuljahr 22/23 GETE 3. ABN / 4. ABN GETE Tesermine: 22.1.22 und 17.12.2 Hr. Houska houska@aon.a EEKTRISCHES FED: Elekrisch geladene Körper üben aufeinander Kräfe aus. Gleichnamige geladene Körper sießen
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen)
") Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
MATHEMATIK. Fachabituiprüfung 2013 zum Erwerb der Fachhochschulreife an. Fachoberschulen und Berufsoberschulen. Ausbildungsrichtung Technik
 Fachabiuiprüfung 2013 zum Erwerb der Fachhochschulreife an Fachoberschulen und Berufsoberschulen MATHEMATIK Ausbildungsrichung Technik Diensag, 4. Juni 2013, 9.00-12.00 Uhr Die Schülerinnen und Schüler
Fachabiuiprüfung 2013 zum Erwerb der Fachhochschulreife an Fachoberschulen und Berufsoberschulen MATHEMATIK Ausbildungsrichung Technik Diensag, 4. Juni 2013, 9.00-12.00 Uhr Die Schülerinnen und Schüler
Fokker-Planck-Gleichung
 Fokker-Planck-Gleichung Beschreibung sochasischer Prozesse David Kleinhans kleinhan@uni-muenser.de WWU Münser David Kleinhans, WWU Münser Fokker-Planck-Gleichung Beschreibung elemenarer sochasischer Prozesse
Fokker-Planck-Gleichung Beschreibung sochasischer Prozesse David Kleinhans kleinhan@uni-muenser.de WWU Münser David Kleinhans, WWU Münser Fokker-Planck-Gleichung Beschreibung elemenarer sochasischer Prozesse
Latente Wärme und Wärmeleitfähigkeit
 Versuch 5 Laene Wärme und Wärmeleifähigkei Aufgabe: Nehmen Sie für die Subsanz,6-Hexandiol Ersarrungskurven auf und ermieln Sie daraus die laene Wärme beim Phasenübergang flüssig-fes sowie den Wärmedurchgangskoeffizienen
Versuch 5 Laene Wärme und Wärmeleifähigkei Aufgabe: Nehmen Sie für die Subsanz,6-Hexandiol Ersarrungskurven auf und ermieln Sie daraus die laene Wärme beim Phasenübergang flüssig-fes sowie den Wärmedurchgangskoeffizienen
MATHEMATIK 3 FÜR EI - ÜBUNGSBLATT 13 Wintersemester 2011/2012
 Prof Dr O Junge, A Biracher Zenrum Mahemaik - M3 Technische Universiä München MATHEMATIK 3 FÜR EI - ÜBUNGSBLATT 3 Winersemeser 2/22 Tuorübungsaufgaben (3-3222) Aufgabe T Berachen Sie das Anfangswerproblem
Prof Dr O Junge, A Biracher Zenrum Mahemaik - M3 Technische Universiä München MATHEMATIK 3 FÜR EI - ÜBUNGSBLATT 3 Winersemeser 2/22 Tuorübungsaufgaben (3-3222) Aufgabe T Berachen Sie das Anfangswerproblem
Theoretische Physik I/II
 Theoreische Physik I/II Prof. Dr. M. Bleicher Insiu für Theoreische Physik J.. Goehe-Universiä Frankfur Aufgabenzeel IV 9. Mai hp://h.physik.uni-frankfur.de/ baeuchle/u Lösungen Die Vorlesung wird durch
Theoreische Physik I/II Prof. Dr. M. Bleicher Insiu für Theoreische Physik J.. Goehe-Universiä Frankfur Aufgabenzeel IV 9. Mai hp://h.physik.uni-frankfur.de/ baeuchle/u Lösungen Die Vorlesung wird durch
Steuer- und und Regelungstechnik II
 Steuer- und und Regelungstechnik II II Vorlesung: Dozent: Professor Ferdinand Svaricek Ort: Ort: 33/03 Zeit: Zeit: Mi Mi 8.5 8.5 9.45 9.45 Uhr Uhr Seminarübungen: Dozent: Dr. Dr. Klaus-Dieter Otto Otto
Steuer- und und Regelungstechnik II II Vorlesung: Dozent: Professor Ferdinand Svaricek Ort: Ort: 33/03 Zeit: Zeit: Mi Mi 8.5 8.5 9.45 9.45 Uhr Uhr Seminarübungen: Dozent: Dr. Dr. Klaus-Dieter Otto Otto
Praktikum Grundlagen der Elektrotechnik Versuch 5. Matrikelnummer:... ...
 FH D FB 3 Fachhochschule Düsseldorf Universiy of Applied Sciences Fachbereich Elekroechnik Deparmen of Elecrical Engineering Prakikum Grundlagen der Elekroechnik Versuch 5 Name Marikelnummer:... Anesa
FH D FB 3 Fachhochschule Düsseldorf Universiy of Applied Sciences Fachbereich Elekroechnik Deparmen of Elecrical Engineering Prakikum Grundlagen der Elekroechnik Versuch 5 Name Marikelnummer:... Anesa
mathphys-online Abiturprüfung Mathematik 13 Technik Differentialgleichungen in Anwendungen - Lösung Aufgabe 1: Abi 1999 / AI
 mahphys-online Abiurprüfung Mahemai 3 Techni Differenialgleichungen in Anwendungen - ösung Aufgabe : Abi 999 / AI Ein erhizer Körper ühl sich im aufe der Zei allmählich auf die onsane Temperaur a (in C)
mahphys-online Abiurprüfung Mahemai 3 Techni Differenialgleichungen in Anwendungen - ösung Aufgabe : Abi 999 / AI Ein erhizer Körper ühl sich im aufe der Zei allmählich auf die onsane Temperaur a (in C)
Zusammenfassung der 5. Vorlesung
 Zusammenfassung der 5. Vorlesung Am Karnevalsdienstag, den 13.2.2018 findet keine Vorlesung statt. Modellierung mit Hilfe von Testsignale Sprungfunktion, Übergangsfunktion Impulsfunktion (Dirac sche Deltafunktion)
Zusammenfassung der 5. Vorlesung Am Karnevalsdienstag, den 13.2.2018 findet keine Vorlesung statt. Modellierung mit Hilfe von Testsignale Sprungfunktion, Übergangsfunktion Impulsfunktion (Dirac sche Deltafunktion)
Freie Schwingung - Lösungsfälle
 Freie Schwingungen Seie von 6 Peer Schüller peer.schueller@bbw.gv.a Freie Schwingung - Lösungsfälle Maheaische / Fachliche Inhale in Sichworen: Differenialgleichung.Ornung i onsanen Koeffizienen, Schwingung
Freie Schwingungen Seie von 6 Peer Schüller peer.schueller@bbw.gv.a Freie Schwingung - Lösungsfälle Maheaische / Fachliche Inhale in Sichworen: Differenialgleichung.Ornung i onsanen Koeffizienen, Schwingung
Lösungshinweise zu den Hausaufgaben:
 P. Engel, T. Pfrommer S. Poppiz, Dr. I. Rbak 8. Gruppenübung zur Vorlesung Höhere Mahemaik Sommersemeser 9 Prof. Dr. M. Sroppel Prof. Dr. N. Knarr Lösungshinweise zu den Hausaufgaben: Aufgabe H. Konvergenzverhalen
P. Engel, T. Pfrommer S. Poppiz, Dr. I. Rbak 8. Gruppenübung zur Vorlesung Höhere Mahemaik Sommersemeser 9 Prof. Dr. M. Sroppel Prof. Dr. N. Knarr Lösungshinweise zu den Hausaufgaben: Aufgabe H. Konvergenzverhalen
7.3. Partielle Ableitungen und Richtungsableitungen
 7.3. Parielle Ableiungen und Richungsableiungen Generell vorgegeben sei eine Funkion f von einer Teilmenge A der Ebene R oder allgemeiner des n-dimensionalen Raumes R n nach R. Für x [x 1,..., x n ] aus
7.3. Parielle Ableiungen und Richungsableiungen Generell vorgegeben sei eine Funkion f von einer Teilmenge A der Ebene R oder allgemeiner des n-dimensionalen Raumes R n nach R. Für x [x 1,..., x n ] aus
Phillips Kurve (Blanchard Ch.8) JKU Linz Riese, Kurs Einkommen, Inflation und Arbeitslosigkeit SS 2008
 JKU Linz Riese, Kurs Einkommen, Inflation und Arbeitslosigkeit SS 2008") Phillips Kurve (Blanchard Ch.8) 151 Einleiung Inflaion und Arbeislosigkei in den Vereinigen Saaen, 1900-1960 In der beracheen Periode war in den USA eine niedrige Arbeislosigkei ypischerweise von hoher
Phillips Kurve (Blanchard Ch.8) 151 Einleiung Inflaion und Arbeislosigkei in den Vereinigen Saaen, 1900-1960 In der beracheen Periode war in den USA eine niedrige Arbeislosigkei ypischerweise von hoher
Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s)
 P (s)") 1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
Kommunikationstechnik I
 Kommunikaionsechnik I Prof. Dr. Sefan Weinzierl Muserlösung 5. Aufgabenbla 1. Moden 1.1 Erläuern Sie, was in der Raumakusik uner Raummoden versanden wird. Der Begriff einer sehenden Welle läss sich am
Kommunikaionsechnik I Prof. Dr. Sefan Weinzierl Muserlösung 5. Aufgabenbla 1. Moden 1.1 Erläuern Sie, was in der Raumakusik uner Raummoden versanden wird. Der Begriff einer sehenden Welle läss sich am