Filter. Industrielle Bildverarbeitung, Vorlesung No M. O. Franz
|
|
|
- Eleonora Engel
- vor 7 Jahren
- Abrufe
Transkript
1 Filter Industrielle Bildverarbeitung, Vorlesung No. 5 1 M. O. Franz falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005.
2 Übersicht 1 Lineare Filter 2 Formale Eigenschaften linearer Filter 3 Nichtlineare Filter
3 Übersicht 1 Lineare Filter 2 Formale Eigenschaften linearer Filter 3 Nichtlineare Filter
4 Lineare Filter Lineare Filter: Wert des Zielpixels wird als gewichtete Summe der Quellpixel berechnet. Größe und Form der Filterregion und Gewichte des Filter werden durch eine Matrix von Filterkoeffizienten spezifiziert, der Filtermatrix H ij oder Filtermaske, z.b. Die Filtermatrix ist - wie ein Bild - eine diskrete zweidimensionale Funktion. Koordinaten werden meist relativ zum Zentrum angegeben ( hot spot ).
5 Anwendung eines Filters I (u, v) = i j I(u + i, v + j)h(i, j)
6 Praktische Implementierung von Filteroperationen Im Gegensatz zu Punktoperationen ist bei Filtern keine in place -Verarbeitung möglich, da die Quellpixel mehrere Male benötigt werden.

7 Beispiel: 3 3-Glättungsfilter mit unterschiedlichen Koeffizienten Glockenförmiger Glättungsfilter:
8 Ganzzahlige Filterkoeffizienten Oft ist es vorteilhafter, mit ganzzahligen Filterkoeffizienten zu arbeiten: keine Umwandlung und Speicherung des Bildes in Gleitkommaformat notwendig auf manchen Rechnerarchitekturen sind Ganzzahloperationen schneller. auf FPGAs sind Gleitkommaoperationen extrem aufwendig. Realisierung über einen Skalierungsfaktor, z.b.
-Filter Typisch: ungeradzahlige Größe")
9 Beispiel: ganzzahliger (2K + 1) (2L + 1)-Filter Typisch: ungeradzahlige Größe zentriert
10 Behandlung von Randproblemen bei Filtern nur Zentralbereich auswerten, bei dem die Filtermaske ganz ins Bild passt Outputbild wird kleiner. Zero padding: Inputbild wird um 0 erweitert In- und Outputbild gleich groß. Gespiegelte Randbedingungen Konstante Randbedingungen
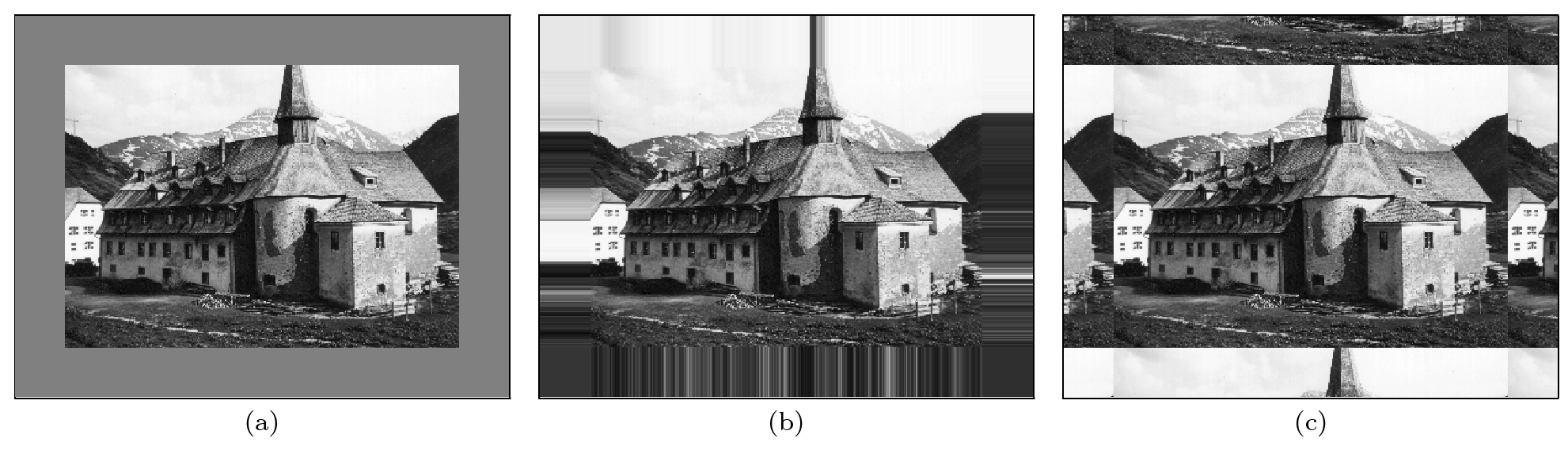
11 Beispiel: Randbedingungen

12 Beispiele für lineare Filter
13 Übersicht 1 Lineare Filter 2 Formale Eigenschaften linearer Filter 3 Nichtlineare Filter
 = I(u i, v j) H(i, j) i= j= kurz: I = I H")
14 Lineare Faltung Für diskrete 2-dimensionale Funktionen I und H I (u, v) = I(u i, v j) H(i, j) i= j= kurz: I = I H
15 Faltung und Korrelation Bisherige Notation für Inputbild I und Filterkern H: lineare Korrelation I (u, v) = K/2 L/2 i= K/2 j= L/2 I(u + i, v + j) H(i, j) Definition Faltung (mit R: Bereich von H mit H(i, j) 0): I (u, v) = i= j= I(u i, v j) H(i, j) = i,j R I(u i, v j) H(i, j) = I(u + i, v + j) H( i, j) i,j R d.h. Faltung entspricht Korrelation mit gespiegelter Filtermatrix.
16 Eigenschaften der Faltung Kommutativität: Linearität: I H = H I (a I) H = I (a H) = a (I H) (I 1 + I 2 ) H = I 1 H + I 2 H aber: Assoziativität: (b + I) H b + I H A (B C) = (A B) C
17 Separable Filter Aus der Assoziativität ergibt sich, daß ein großer Filter H in mehrere kleine Filter H i zerlegt werden kann: I H = I (H 1 H 2... ) = (... ((I H 1 ) H 2 )... ) Insbesondere bei 2 eindimensionalen Filtern in x- und y-richtung (x/y-separabilität), z.b 1 H x = [ ] bzw. H y = 1 1 ergibt sich I = (I H x ) H y = I (H x H y ) = I H xy z.b. H xy = H x H y = d.h. 8 statt 15 Operationen
 = H x (i) H y (j) Beispiel: Gaußfilter G xy (x, y) = e x2 +y 2 2σ 2 = e x2 2σ 2 e y2 2σ 2 = G x (x) G y (y) [Kienzle et al.")
18 Beispiele für separable Filter Zweidimensionale Filter sind separabel, wenn sie als äußeres Produkt geschrieben werden können: H xy (i, j) = H x (i) H y (j) Beispiel: Gaußfilter G xy (x, y) = e x2 +y 2 2σ 2 = e x2 2σ 2 e y2 2σ 2 = G x (x) G y (y) [Kienzle et al., 2002]
: { 1 für i = j = 0 δ(i, j) = 0")
19 Dirac-Funktion Die Impuls- oder Dirac-Funktion δ ist das neutrale Element der Faltung I δ = I Definition (zweidimensional, diskret): { 1 für i = j = 0 δ(i, j) = 0 sonst.

20 Dirac-Funktion als neutrales Element der Faltung Die Faltung mit der Impulsfunktion ergibt wieder das ursprüngliche Bild.
21 Impulsantwort Die Impulsfunktion als Input eines linearen Filters liefert die Filterfunktion H als Ergebnis. Ein Impuls charakterisiert ein lineares System vollständig!
22 Übersicht 1 Lineare Filter 2 Formale Eigenschaften linearer Filter 3 Nichtlineare Filter
23 Rauschunterdrückung mit linearen Filtern Lineare Glättungsfilter reduzieren zwar das Rauschen im Bild, aber gleichzeitig werden Kanten oder Linien verbreitert und im Kontrast reduziert.
24 Nichtlineare Filter Nichtlineare Filter werden so wie lineare Filter über eine Umgebung R des Zielpixels mit einer nichtlinearen Funktion f : R R berechnet: I (u, v) = f (I(u, v), I(u + 1, v), I(u 1, v), I(u, v + 1),... ) z.b. Minimum- und Maximumfilter: I (u, v) = min{i(u + i, v + j) i, j R} I (u, v) = max{i(u + i, v + j) i, j R}

25 Beispiel: Minimum- und Maximumfilter auf Salt-and-Pepper-Rauschen Minimumfilter eliminiert weiße Punkte und verbreitert dunkle Regionen, Maximumfilter macht das Gegenteil.
26 Medianfilter Der Medianfilter ersetzt jeden Pixel durch den Median seiner Umgebung R. Bei 2k + 1 aufsteigend sortierten Pixeln ist der Median definiert als median{p 0, p 1,..., p k,..., p 2k } = p k, bei 2k aufsteigend sortierten Pixeln {p 0,..., p 2k 1 } als (p k 1 + p k )/2.
27 Beispiel: 3 3-Medianfilter
28 Vergleich linearer Glättungs- und Medianfilter Der lineare Filter dämpft das Rauschen, macht aber das Bild unscharf. Der Medianfilter eliminiert Spitzen/Höhen, erzeugt örtlich Flecken mit konstanter Intensität.
29 Gewichteter Medianfilter Grundidee: Wert wird in der sortierten Liste so oft wiederholt, wie sein Gewicht ist, d.h. die Liste wird dadurch L = i,j R W(i, j) lang. Beispiel:
30 Weitere nichtlineare Filter... Morphologische Filter Interest-Point-Detektoren Volterra-Filter: y(t) = h (0) + h (1) (τ 1 )x(t τ 1 ) dτ 1 R + h (2) (τ 1, τ 2 )x(t τ 1 )x(t τ 2 ) dτ 1 dτ 2 R 2 + h (3) (τ 1, τ 2, τ 3 )x(t τ 1 )x(t τ 2 )x(t τ 3 ) dτ 1 dτ 2 dτ 2 R 3 +
Bildverarbeitung Herbstsemester
 Bildverarbeitung Herbstsemester Herbstsemester 2009 2012 Filter Filter 1 Inhalt Lineare und nichtlineare Filter Glättungsfilter (z.b. Gauss-Filter) Differenzfilter (z.b. Laplace-Filter) Lineare Faltung
Bildverarbeitung Herbstsemester Herbstsemester 2009 2012 Filter Filter 1 Inhalt Lineare und nichtlineare Filter Glättungsfilter (z.b. Gauss-Filter) Differenzfilter (z.b. Laplace-Filter) Lineare Faltung
Was bisher geschah. digitale Bilder: Funktion B : pos col Matrix B col pos. Punktoperationen f : col 1 col 2
 Was bisher geschah digitale Bilder: Funktion B : pos col Matrix B col pos statistische Merkmale Punktoperationen f : col 1 col 2 (Bildanalyse) (Farbtransformation) Geometrische Operationen f : pos 1 pos
Was bisher geschah digitale Bilder: Funktion B : pos col Matrix B col pos statistische Merkmale Punktoperationen f : col 1 col 2 (Bildanalyse) (Farbtransformation) Geometrische Operationen f : pos 1 pos
Morphologische Filter
 Morphologische Filter Industrielle Bildverarbeitung, Vorlesung No. 8 1 M. O. Franz 28.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005. Übersicht 1 Morphologische
Morphologische Filter Industrielle Bildverarbeitung, Vorlesung No. 8 1 M. O. Franz 28.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005. Übersicht 1 Morphologische
1. Filterung im Ortsbereich 1.1 Grundbegriffe 1.2 Lineare Filter 1.3 Nicht-Lineare Filter 1.4 Separabele Filter 1.
 . Filterung im Ortsbereich. Grundbegriffe. Lineare Filter.3 Nicht-Lineare Filter.4 Separabele Filter.5 Implementierung. Filterung im Frequenzbereich. Fouriertransformation. Hoch-, Tief- und Bandpassfilter.3
. Filterung im Ortsbereich. Grundbegriffe. Lineare Filter.3 Nicht-Lineare Filter.4 Separabele Filter.5 Implementierung. Filterung im Frequenzbereich. Fouriertransformation. Hoch-, Tief- und Bandpassfilter.3
Einführung in die medizinische Bildverarbeitung WS 12/13
 Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Pipeline Pipelinestufen können sich unterscheiden, beinhalten aber i.d.r. eine Stufe zur Bildvorverarbeitung zur
Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Pipeline Pipelinestufen können sich unterscheiden, beinhalten aber i.d.r. eine Stufe zur Bildvorverarbeitung zur
Bildverbesserung (Image Enhancement)
") Prof. Dr. Wolfgang Konen, Thomas Zielke Bildverbesserung (Image Enhancement) WS07 7.1 Konen, Zielke Der Prozess der Bildverbesserung (1) Bildverbesserung wird häufig dafür eingesetzt, die für einen menschlichen
Prof. Dr. Wolfgang Konen, Thomas Zielke Bildverbesserung (Image Enhancement) WS07 7.1 Konen, Zielke Der Prozess der Bildverbesserung (1) Bildverbesserung wird häufig dafür eingesetzt, die für einen menschlichen
EVC Repetitorium Blender
 EVC Repetitorium Blender Michael Hecher Felix Kreuzer Institute of Computer Graphics and Algorithms Vienna University of Technology INSTITUTE OF COMPUTER GRAPHICS AND ALGORITHMS Filter Transformationen
EVC Repetitorium Blender Michael Hecher Felix Kreuzer Institute of Computer Graphics and Algorithms Vienna University of Technology INSTITUTE OF COMPUTER GRAPHICS AND ALGORITHMS Filter Transformationen
FILTER UND FALTUNGEN
 Ausarbeitung zum Vortrag von Daniel Schmitzek im Seminar Verarbeitung und Manipulation digitaler Bilder I n h a l t. Der Begriff des Filters 3 2. Faltungsfilter 4 2. Glättungsfilter 4 2.2 Filter zur Kantendetektion
Ausarbeitung zum Vortrag von Daniel Schmitzek im Seminar Verarbeitung und Manipulation digitaler Bilder I n h a l t. Der Begriff des Filters 3 2. Faltungsfilter 4 2. Glättungsfilter 4 2.2 Filter zur Kantendetektion
Bildverarbeitung: Filterung. D. Schlesinger () Bildverarbeitung: Filterung 1 / 17
 Bildverarbeitung: Filterung 1 / 17") Bildverarbeitung: Filterung D. Schlesinger () Bildverarbeitung: Filterung 1 / 17 Allgemeines Klassische Anwendung: Entrauschung (Fast) jeder Filter basiert auf einem Modell (Annahme): Signal + Rauschen
Bildverarbeitung: Filterung D. Schlesinger () Bildverarbeitung: Filterung 1 / 17 Allgemeines Klassische Anwendung: Entrauschung (Fast) jeder Filter basiert auf einem Modell (Annahme): Signal + Rauschen
Struktur des menschlichen Auges. Bildgebende Verfahren in der Medizin und medizinische Bildverarbeitung Bildverbesserung 2 / 99
 Struktur des menschlichen Auges 2 / 99 Detektoren im Auge Ca. 100 150 Mio. Stäbchen Ca. 1 Mio. Zäpfchen 3 / 99 Zapfen Entlang der Sehachse, im Fokus Tagessehen (Photopisches Sehen) Scharfsehen Farbsehen
Struktur des menschlichen Auges 2 / 99 Detektoren im Auge Ca. 100 150 Mio. Stäbchen Ca. 1 Mio. Zäpfchen 3 / 99 Zapfen Entlang der Sehachse, im Fokus Tagessehen (Photopisches Sehen) Scharfsehen Farbsehen
Digitale Bildverarbeitung Einheit 9 Morphologische Operationen
 Digitale Bildverarbeitung Einheit 9 Morphologische Operationen Lehrauftrag WS 05/06 Fachbereich M+I der FH-Offenburg Dipl.-Math. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Digitale Bildverarbeitung Einheit 9 Morphologische Operationen Lehrauftrag WS 05/06 Fachbereich M+I der FH-Offenburg Dipl.-Math. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Digitale Bildverarbeitung Einheit 9 Morphologische Operationen
 Digitale Bildverarbeitung Einheit 9 Morphologische Operationen Lehrauftrag SS 2007 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Digitale Bildverarbeitung Einheit 9 Morphologische Operationen Lehrauftrag SS 2007 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Bildverbesserung. Frequenz-, Punkt- und Maskenoperationen. Backfrieder-Hagenberg
 Bildverbesserung Frequenz-, Punkt- und Maskenoperationen Filtern im Frequenzraum Fouriertransformation f(x)->f( ) Filter-Multiplikation F =FxH Rücktransformation F ( )->f (x) local-domain frequency-domain
Bildverbesserung Frequenz-, Punkt- und Maskenoperationen Filtern im Frequenzraum Fouriertransformation f(x)->f( ) Filter-Multiplikation F =FxH Rücktransformation F ( )->f (x) local-domain frequency-domain
Digitale Bildverarbeitung Einheit 9 Morphologische Operationen
 Digitale Bildverarbeitung Einheit 9 Morphologische Operationen Lehrauftrag WS 2007/2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Digitale Bildverarbeitung Einheit 9 Morphologische Operationen Lehrauftrag WS 2007/2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Diskrete Signalverarbeitung und diskrete Systeme
 Diskrete Signalverarbeitung und diskrete Systeme Computer- basierte Verarbeitung von Signalen und Realisierung von Systemverhalten erfordern diskrete Signale und diskrete Systembeschreibungen. Wegen der
Diskrete Signalverarbeitung und diskrete Systeme Computer- basierte Verarbeitung von Signalen und Realisierung von Systemverhalten erfordern diskrete Signale und diskrete Systembeschreibungen. Wegen der
Erweitertes boolsches Retrieval
 Erweitertes boolsches Retrieval In diesem Unterabschnitt werden andere Ansätze zur Verbesserung des boolschen Retrievals vorgestellt. Im Gegensatz zum Vektorraummodell wird bei diesen Ansätzen versucht,
Erweitertes boolsches Retrieval In diesem Unterabschnitt werden andere Ansätze zur Verbesserung des boolschen Retrievals vorgestellt. Im Gegensatz zum Vektorraummodell wird bei diesen Ansätzen versucht,
Bildverarbeitung: Diffusion Filters. D. Schlesinger ()Bildverarbeitung: Diffusion Filters 1 / 10
Bildverarbeitung: Diffusion Filters 1 / 10") Bildverarbeitung: Diffusion Filters D. Schlesinger ()Bildverarbeitung: Diffusion Filters 1 / 10 Diffusion Idee Motiviert durch physikalische Prozesse Ausgleich der Konzentration eines Stoffes. Konzentration
Bildverarbeitung: Diffusion Filters D. Schlesinger ()Bildverarbeitung: Diffusion Filters 1 / 10 Diffusion Idee Motiviert durch physikalische Prozesse Ausgleich der Konzentration eines Stoffes. Konzentration
Kapitel 8: Operationen auf Rasterdaten
 LUDWIG- MAXIMILIANS- UNIVERSITY MUNICH DEPARTMENT INSTITUTE FOR INFORMATICS DATABASE Kapitel 8: Operationen auf Rasterdaten Skript zur Vorlesung Geo-Informationssysteme Wintersemester 2015/16 Ludwig-Maximilians-Universität
LUDWIG- MAXIMILIANS- UNIVERSITY MUNICH DEPARTMENT INSTITUTE FOR INFORMATICS DATABASE Kapitel 8: Operationen auf Rasterdaten Skript zur Vorlesung Geo-Informationssysteme Wintersemester 2015/16 Ludwig-Maximilians-Universität
Kanten und Konturen. Industrielle Bildverarbeitung, Vorlesung No M. O. Franz
 Kanten und Konturen Industrielle Bildverarbeitung, Vorlesung No. 6 1 M. O. Franz 14.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005. Übersicht 1 Kanten und
Kanten und Konturen Industrielle Bildverarbeitung, Vorlesung No. 6 1 M. O. Franz 14.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005. Übersicht 1 Kanten und
4. Segmentierung von Objekten Video - Inhaltsanalyse
 4. Segmentierung von Objekten Video - Inhaltsanalyse Stephan Kopf Inhalt Vorgehensweise Berechnung der Kamerabewegungen zwischen beliebigen Bildern Transformation eines Bildes Hintergrundbilder / Panoramabilder
4. Segmentierung von Objekten Video - Inhaltsanalyse Stephan Kopf Inhalt Vorgehensweise Berechnung der Kamerabewegungen zwischen beliebigen Bildern Transformation eines Bildes Hintergrundbilder / Panoramabilder
Digitale Bildverarbeitung Einheit 8 Lineare Filterung
 Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag WS 05/06 Fachbereich M+I der FH-Offenburg Dipl.-Math. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag WS 05/06 Fachbereich M+I der FH-Offenburg Dipl.-Math. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Systemtheorie abbildender Systeme
 Bandbegrenzung Bild in (b) nicht band-begrenzt: scharfe Kanten = Dirac-Funktionen = weißes Spektrum Erfordert Tapering vor Digitalisierung (Multiplikation mit geeigneter Fensterfunktion; auf Null drücken
Bandbegrenzung Bild in (b) nicht band-begrenzt: scharfe Kanten = Dirac-Funktionen = weißes Spektrum Erfordert Tapering vor Digitalisierung (Multiplikation mit geeigneter Fensterfunktion; auf Null drücken
Bildverarbeitung. Bildvorverarbeitung - Fourier-Transformation -
 Bildverarbeitung Bildvorverarbeitung - Fourier-Transformation - 1 Themen Methoden Punktoperationen / Lokale Operationen / Globale Operationen Homogene / Inhomogene Operationen Lineare / Nichtlineare Operationen
Bildverarbeitung Bildvorverarbeitung - Fourier-Transformation - 1 Themen Methoden Punktoperationen / Lokale Operationen / Globale Operationen Homogene / Inhomogene Operationen Lineare / Nichtlineare Operationen
1 Einleitung Einordnung des Gebietes Aufbau des Buches Philosophie Inhalte Einige Lehrbücher...
 Inhaltsverzeichnis 1 Einleitung... 1 1.1 Einordnung des Gebietes... 1 1.2 Aufbau des Buches... 3 1.2.1 Philosophie... 3 1.2.2 Inhalte... 5 1.3 Einige Lehrbücher... 6 2 Allgemeine Begriffe... 11 2.1 Einige
Inhaltsverzeichnis 1 Einleitung... 1 1.1 Einordnung des Gebietes... 1 1.2 Aufbau des Buches... 3 1.2.1 Philosophie... 3 1.2.2 Inhalte... 5 1.3 Einige Lehrbücher... 6 2 Allgemeine Begriffe... 11 2.1 Einige
Computergrafik 2: Filtern im Ortsraum
 Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV, Regina Pohle,. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV, Regina Pohle,. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Einführung in die medizinische Bildverarbeitung SS 2013
 Einführung in die medizinische Bildverarbeitung SS 2013 Stephan Gimbel 1 Kurze Wiederholung Gradienten 1. und 2. Ableitung grad( f ( x, y) ) = f ( x, y) = f ( x, y) x f ( x, y) y 2 f ( x, y) = 2 f ( x,
Einführung in die medizinische Bildverarbeitung SS 2013 Stephan Gimbel 1 Kurze Wiederholung Gradienten 1. und 2. Ableitung grad( f ( x, y) ) = f ( x, y) = f ( x, y) x f ( x, y) y 2 f ( x, y) = 2 f ( x,
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik
![Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik](/thumbs/69/59889032.jpg "Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik") Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Detektion von Eckpunkten und einfachen Kurven
 Detektion von Eckpunkten und einfachen Kurven Industrielle Bildverarbeitung, Vorlesung No. 7 1 M. O. Franz 21.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005.
Detektion von Eckpunkten und einfachen Kurven Industrielle Bildverarbeitung, Vorlesung No. 7 1 M. O. Franz 21.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005.
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Technische Universität München. Fakultät für Informatik
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Thema: Filterung im Bildraum: Konvolution Proseminar: Grundlagen Bildverstehen/Bildgestaltung Jonas Zaddach
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Thema: Filterung im Bildraum: Konvolution Proseminar: Grundlagen Bildverstehen/Bildgestaltung Jonas Zaddach
Modul Digitale Bildverarbeitung SS16 Bestandteile der Lehrveranstaltung und Prüfung: Vorlesungen Übungsserien Praktika (ImageJ) bis Mai 2016 Projekt
 bis Mai 2016 Projekt") Modul Digitale Bildverarbeitung SS16 Bestandteile der Lehrveranstaltung und Prüfung: Vorlesungen Übungsserien Praktika (ImageJ) bis Mai 2016 Projekt im Juni 2016 Themen: Digitale Bilder, Eigenschaften
Modul Digitale Bildverarbeitung SS16 Bestandteile der Lehrveranstaltung und Prüfung: Vorlesungen Übungsserien Praktika (ImageJ) bis Mai 2016 Projekt im Juni 2016 Themen: Digitale Bilder, Eigenschaften
Bildverarbeitung in R
 Bildverarbeitung in R Tobias Klinke Proseminar R Fachbereich Informatik Fakultät für Mathematik, Informatik und Naturwissenschaften Universität Hamburg Betreuer: Jakob Lüttgau 2016-07-13 Tobias Klinke
Bildverarbeitung in R Tobias Klinke Proseminar R Fachbereich Informatik Fakultät für Mathematik, Informatik und Naturwissenschaften Universität Hamburg Betreuer: Jakob Lüttgau 2016-07-13 Tobias Klinke
Computergrafik 2: Filtern im Ortsraum
 Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Frequenzraum
 Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Fourier-Transformation Graphische DV und BV, Regina Pohle, 8. Fourier-Transformation 1 Einordnung in die Inhalte der Vorlesung Einführung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Fourier-Transformation Graphische DV und BV, Regina Pohle, 8. Fourier-Transformation 1 Einordnung in die Inhalte der Vorlesung Einführung
Elementare Bildverarbeitungsoperationen
 1 Elementare Bildverarbeitungsoperationen - Kantenerkennung - 1 Einführung 2 Gradientenverfahren 3 Laplace-Verfahren 4 Canny-Verfahren 5 Literatur 1 Einführung 2 1 Einführung Kantenerkennung basiert auf
1 Elementare Bildverarbeitungsoperationen - Kantenerkennung - 1 Einführung 2 Gradientenverfahren 3 Laplace-Verfahren 4 Canny-Verfahren 5 Literatur 1 Einführung 2 1 Einführung Kantenerkennung basiert auf
Lineare Prädiktion. Stephan Arlinghaus 9. November 2006
 Stephan Arlinghaus 9. November 2006 Gliederung 1 Einleitung Sprachanalyse... etwas Mathematik 2 Das autoregressive Modell (AR) (LP) 3 Kovarianzmethode Autokorrelationsmethode Methodenvergleich 4 5 Der
Stephan Arlinghaus 9. November 2006 Gliederung 1 Einleitung Sprachanalyse... etwas Mathematik 2 Das autoregressive Modell (AR) (LP) 3 Kovarianzmethode Autokorrelationsmethode Methodenvergleich 4 5 Der
Prüfung Grundlagen der digitalen Bildbearbeitung
 Prüfung Grundlagen der digitalen Bildbearbeitung 14.06.2005 1) Gegeben sind 24 Bilder, die als Eingabe als auch als Ergebnis einer der 10 Bildoperationen auftreten können. (14 Punkte) 10 folgenden Bildoperationen,
Prüfung Grundlagen der digitalen Bildbearbeitung 14.06.2005 1) Gegeben sind 24 Bilder, die als Eingabe als auch als Ergebnis einer der 10 Bildoperationen auftreten können. (14 Punkte) 10 folgenden Bildoperationen,
Bildpunkt auf dem Gitter: Pixel (picture element) (manchmal auch Pel)
 (manchmal auch Pel)") 4. Digitalisierung und Bildoperationen 4.1 Digitalisierung (Sampling, Abtastung) Rasterung auf 2D-Bildmatrix mathematisch: Abb. einer 2-dim. Bildfunktion mit kontinuierlichem Definitionsbereich auf digitales
4. Digitalisierung und Bildoperationen 4.1 Digitalisierung (Sampling, Abtastung) Rasterung auf 2D-Bildmatrix mathematisch: Abb. einer 2-dim. Bildfunktion mit kontinuierlichem Definitionsbereich auf digitales
Elementare Bildverarbeitungsoperationen
 1 Elementare Bildverarbeitungsoperationen - Lineare Filterung - 1 Einführung 2 Definition der Faltung 3 Beispiele linearer Filter 4 Diskussion 5 Ausblick: nichtlineare Filterung 6 Literatur 1 Einführung
1 Elementare Bildverarbeitungsoperationen - Lineare Filterung - 1 Einführung 2 Definition der Faltung 3 Beispiele linearer Filter 4 Diskussion 5 Ausblick: nichtlineare Filterung 6 Literatur 1 Einführung
Computergraphik 1 2. Teil: Bildverarbeitung. Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation
 Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Filterung von Bildern (2D-Filter)
") Prof. Dr. Wolfgang Konen, Thomas Zielke Filterung von Bildern (2D-Filter) SS06 6. Konen, Zielke Aktivierung Was, denken Sie, ist ein Filter in der BV? Welche Filter kennen Sie? neuer Pixelwert bilden aus
Prof. Dr. Wolfgang Konen, Thomas Zielke Filterung von Bildern (2D-Filter) SS06 6. Konen, Zielke Aktivierung Was, denken Sie, ist ein Filter in der BV? Welche Filter kennen Sie? neuer Pixelwert bilden aus
Computergrafik 2: Morphologische Operationen
 Computergrafik 2: Morphologische Operationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies
Computergrafik 2: Morphologische Operationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies
Segmentierung. Vorlesung FH-Hagenberg SEM
 Segmentierung Vorlesung FH-Hagenberg SEM Segmentierung: Definition Die Pixel eines Bildes A={a i }, i=1:n, mit N der Anzahl der Pixel, werden in Teilmengen S i unterteilt. Die Teilmengen sind disjunkt
Segmentierung Vorlesung FH-Hagenberg SEM Segmentierung: Definition Die Pixel eines Bildes A={a i }, i=1:n, mit N der Anzahl der Pixel, werden in Teilmengen S i unterteilt. Die Teilmengen sind disjunkt
Die Größe A(n, d) und optimale Codes
 und optimale Codes") Die Größe A(n, d) und optimale Codes Definition Optimaler Code Wir definieren A(n, d) = max{m binärer (n, M, d) Code} Ein (n, M, d)-code heißt optimal, falls M = A(n, d). Bestimmung von A(n, d) ist offenes
Die Größe A(n, d) und optimale Codes Definition Optimaler Code Wir definieren A(n, d) = max{m binärer (n, M, d) Code} Ein (n, M, d)-code heißt optimal, falls M = A(n, d). Bestimmung von A(n, d) ist offenes
Signale, Transformationen
 Signale, Transformationen Signal: Funktion s(t), t reell (meist t die Zeit, s eine Messgröße) bzw Zahlenfolge s k = s[k], k ganzzahlig s reell oder komplex s[k] aus s(t): Abtastung mit t = kt s, s[k] =
Signale, Transformationen Signal: Funktion s(t), t reell (meist t die Zeit, s eine Messgröße) bzw Zahlenfolge s k = s[k], k ganzzahlig s reell oder komplex s[k] aus s(t): Abtastung mit t = kt s, s[k] =
Algebraische Kurven. Vorlesung 24. Tangenten bei Parametrisierungen. (Q)) die Richtung der Tangente von C in P.
) die Richtung der Tangente von C in P.") Prof. Dr. H. Brenner Osnabrück SS 2012 Algebraische Kurven Vorlesung 24 Tangenten bei Parametrisierungen Satz 24.1. Es sei K ein unendlicher Körper und ϕ: A 1 K A n K eine durch n Polynome ϕ = (ϕ 1 (t),...,ϕ
Prof. Dr. H. Brenner Osnabrück SS 2012 Algebraische Kurven Vorlesung 24 Tangenten bei Parametrisierungen Satz 24.1. Es sei K ein unendlicher Körper und ϕ: A 1 K A n K eine durch n Polynome ϕ = (ϕ 1 (t),...,ϕ
Mathematik für Naturwissenschaftler II
 Mathematik für Naturwissenschaftler II Dr Peter J Bauer Institut für Mathematik Universität Frankfurt am Main Sommersemester 27 Lineare Algebra Der mehrdimensionale Raum Vektoren Im Teil I dieser Vorlesung
Mathematik für Naturwissenschaftler II Dr Peter J Bauer Institut für Mathematik Universität Frankfurt am Main Sommersemester 27 Lineare Algebra Der mehrdimensionale Raum Vektoren Im Teil I dieser Vorlesung
Verarbeitung von Volumenbildern wichtige Werkzeuge
 Verarbeitung von Volumenbildern wichtige Werkzeuge Verarbeitung von Volumenbildern Michael Godehardt, Fraunhofer ITWM Überblick:. Problemstellungen. Distanztransformation. Einfache morphologische Transformationen
Verarbeitung von Volumenbildern wichtige Werkzeuge Verarbeitung von Volumenbildern Michael Godehardt, Fraunhofer ITWM Überblick:. Problemstellungen. Distanztransformation. Einfache morphologische Transformationen
Digitale Signalverarbeitung
 Daniel Ch. von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme 4. Auflage Mit 222 Bildern, 91 Beispielen, 80 Aufgaben sowie einer CD-ROM mit Lösungen
Daniel Ch. von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme 4. Auflage Mit 222 Bildern, 91 Beispielen, 80 Aufgaben sowie einer CD-ROM mit Lösungen
Erzeugendensystem und Basis
 Erzeugendensystem und Basis Definition Erzeugendensystem und Basis eines Unterraums Sei S F n 2 ein Unterraum. Eine Menge G = {g 1,..., g k } S heißt Erzeugendensystem von S, falls jedes x S als Linearkombination
Erzeugendensystem und Basis Definition Erzeugendensystem und Basis eines Unterraums Sei S F n 2 ein Unterraum. Eine Menge G = {g 1,..., g k } S heißt Erzeugendensystem von S, falls jedes x S als Linearkombination
14. Bildbearbeitung. Bildverbesserung Compositing, Masken, Layer-Techniken Painting. Bildverbesserung
 14. Bildbearbeitung Bildverbesserung Compositing, Masken, Layer-Techniken Painting Bildverbesserung Einfachste Methode: Steuerung der Intensitätswiedergabe durch Anwendung von Funktionen auf alle 3 Grundfarben-Intensitäten
14. Bildbearbeitung Bildverbesserung Compositing, Masken, Layer-Techniken Painting Bildverbesserung Einfachste Methode: Steuerung der Intensitätswiedergabe durch Anwendung von Funktionen auf alle 3 Grundfarben-Intensitäten
Formale Grundlagen 2008W. Vorlesung im 2008S Institut für Algebra Johannes Kepler Universität Linz
 Formale Grundlagen Institut für Algebra Johannes Kepler Universität Linz Vorlesung im 2008S http://www.algebra.uni-linz.ac.at/students/win/fg Inhalt Definition Sei A eine Menge und ɛ A A A eine zweistellige
Formale Grundlagen Institut für Algebra Johannes Kepler Universität Linz Vorlesung im 2008S http://www.algebra.uni-linz.ac.at/students/win/fg Inhalt Definition Sei A eine Menge und ɛ A A A eine zweistellige
Digitale Signalverarbeitung
 Digitale Signalverarbeitung Hans-Günter Hirsch Institut für Mustererkennung email: hans-guenter.hirsch@hs-niederrhein.de http://dnt.kr.hs-niederrhein.de Webserver: http://dnt.kr.hs-niederrhein.de/dsv15/
Digitale Signalverarbeitung Hans-Günter Hirsch Institut für Mustererkennung email: hans-guenter.hirsch@hs-niederrhein.de http://dnt.kr.hs-niederrhein.de Webserver: http://dnt.kr.hs-niederrhein.de/dsv15/
Inhaltsverzeichnis. Daniel von Grünigen. Digitale Signalverarbeitung. mit einer Einführung in die kontinuierlichen Signale und Systeme
 Inhaltsverzeichnis Daniel von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme ISBN (Buch): 978-3-446-44079-1 ISBN (E-Book): 978-3-446-43991-7 Weitere
Inhaltsverzeichnis Daniel von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme ISBN (Buch): 978-3-446-44079-1 ISBN (E-Book): 978-3-446-43991-7 Weitere
ൿ ψ ± = 01 ± Verschränkte Zustände. Fabio Di Pumpo ASQ Leibnitz und die Quantenphysik Verschränkte Zustände WS16/17
 φ ± ൿ = 00 ± 11 2 ൿ ψ ± = 01 ± 10 2 Verschränkte Zustände Fabio Di Pumpo 01.03.2017 ASQ Leibnitz und die Quantenphysik Verschränkte Zustände WS16/17 Seite 2 Inhaltsverzeichnis 1. Einleitung 2. Hilbertraum
φ ± ൿ = 00 ± 11 2 ൿ ψ ± = 01 ± 10 2 Verschränkte Zustände Fabio Di Pumpo 01.03.2017 ASQ Leibnitz und die Quantenphysik Verschränkte Zustände WS16/17 Seite 2 Inhaltsverzeichnis 1. Einleitung 2. Hilbertraum
L5 Matrizen I. Matrix: (Plural: Matrizen)
") L5 Matrizen I Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen - Beschreibung von Lorenz-Transformationen (spezielle
L5 Matrizen I Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen - Beschreibung von Lorenz-Transformationen (spezielle
Praktikum-Meßtechnik Verfasser: Dr. H. Bergelt
 TU Bergakademie Freiberg Praktikum-Meßtechnik Verfasser: Dr. H. Bergelt Filter in der Bildverarbeitung. Einleitung Digitale Filter gehören zu den wirkungsvollsten Methoden der Bildverarbeitung. Wir können
TU Bergakademie Freiberg Praktikum-Meßtechnik Verfasser: Dr. H. Bergelt Filter in der Bildverarbeitung. Einleitung Digitale Filter gehören zu den wirkungsvollsten Methoden der Bildverarbeitung. Wir können
Kantenextraktion. Klassische Verfahren. Christoph Wagner. 30. Januar Vortrag zum Seminar Bildsegmentierung und Computer Vision
 Klassische Verfahren 30. Januar 2006 Vortrag zum Seminar Bildsegmentierung und Computer Vision Gliederung Grundlagen 1 Grundlagen Aufgabenstellung Anforderungen an Kantenfilter Lineare Filter 2 3 Gliederung
Klassische Verfahren 30. Januar 2006 Vortrag zum Seminar Bildsegmentierung und Computer Vision Gliederung Grundlagen 1 Grundlagen Aufgabenstellung Anforderungen an Kantenfilter Lineare Filter 2 3 Gliederung
Matrizen. Stefan Keppeler. 19. & 26. November Mathematik I für Biologen, Geowissenschaftler und Geoökologen
 Mathematik I für Biologen, Geowissenschaftler und Geoökologen 19. & 26. November 2008 Definition, Summe & Produkt Transponierte Beispiel: Einwohnerzahlen Leslie-Populationsmodell Beispiel Addition Multiplikation
Mathematik I für Biologen, Geowissenschaftler und Geoökologen 19. & 26. November 2008 Definition, Summe & Produkt Transponierte Beispiel: Einwohnerzahlen Leslie-Populationsmodell Beispiel Addition Multiplikation
Digitale Bildverarbeitung Einheit 8 Lineare Filterung
 Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen, wie lineare
Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen, wie lineare
Vektorräume. 1. v + w = w + v (Kommutativität der Vektoraddition)
") Vektorräume In vielen physikalischen Betrachtungen treten Größen auf, die nicht nur durch ihren Zahlenwert charakterisiert werden, sondern auch durch ihre Richtung Man nennt sie vektorielle Größen im Gegensatz
Vektorräume In vielen physikalischen Betrachtungen treten Größen auf, die nicht nur durch ihren Zahlenwert charakterisiert werden, sondern auch durch ihre Richtung Man nennt sie vektorielle Größen im Gegensatz
13 Mehrdimensionale Zufallsvariablen Zufallsvektoren
 3 Mehrdimensionale Zufallsvariablen Zufallsvektoren Bisher haben wir uns ausschließlich mit Zufallsexperimenten beschäftigt, bei denen die Beobachtung eines einzigen Merkmals im Vordergrund stand. In diesem
3 Mehrdimensionale Zufallsvariablen Zufallsvektoren Bisher haben wir uns ausschließlich mit Zufallsexperimenten beschäftigt, bei denen die Beobachtung eines einzigen Merkmals im Vordergrund stand. In diesem
3. Analyse der Kamerabewegung Video - Inhaltsanalyse
 3. Analyse der Kamerabewegung Video - Inhaltsanalyse Stephan Kopf Bewegungen in Videos Objektbewegungen (object motion) Kameraoperationen bzw. Kamerabewegungen (camera motion) Semantische Informationen
3. Analyse der Kamerabewegung Video - Inhaltsanalyse Stephan Kopf Bewegungen in Videos Objektbewegungen (object motion) Kameraoperationen bzw. Kamerabewegungen (camera motion) Semantische Informationen
6. Woche: Lineare Codes, Syndrom, Gilbert-Varshamov Schranke. 6. Woche: Lineare Codes, Syndrom, Gilbert-Varshamov Schranke 107/ 238
 6 Woche: Lineare Codes, Syndrom, Gilbert-Varshamov Schranke 6 Woche: Lineare Codes, Syndrom, Gilbert-Varshamov Schranke 107/ 238 Erinnerung: Der Vektorraum F n 2 Schreiben {0, 1} n als F n 2 Definition
6 Woche: Lineare Codes, Syndrom, Gilbert-Varshamov Schranke 6 Woche: Lineare Codes, Syndrom, Gilbert-Varshamov Schranke 107/ 238 Erinnerung: Der Vektorraum F n 2 Schreiben {0, 1} n als F n 2 Definition
Diskrete Ereignissysteme. Spezielle Netzstrukturen- Übersicht. Beispiele zu speziellen Netzstrukturen. Petri-Netze und Zustandsautomaten
 Diskrete Ereignissysteme 4.4 Spezialisierungen von Petri Netzen Spezielle Netzstrukturen- Übersicht Ein S-T-Netz heisst Zustands-System gdw. gilt:. W(f) = für alle Kanten f F. 2. t = t = für alle Transitionen
Diskrete Ereignissysteme 4.4 Spezialisierungen von Petri Netzen Spezielle Netzstrukturen- Übersicht Ein S-T-Netz heisst Zustands-System gdw. gilt:. W(f) = für alle Kanten f F. 2. t = t = für alle Transitionen
Recommender Systeme mit Collaborative Filtering
 Fakultät für Informatik Technische Universität München Email: rene.romen@tum.de 6. Juni 2017 Recommender Systeme Definition Ziel eines Recommender Systems ist es Benutzern Items vorzuschlagen die diesem
Fakultät für Informatik Technische Universität München Email: rene.romen@tum.de 6. Juni 2017 Recommender Systeme Definition Ziel eines Recommender Systems ist es Benutzern Items vorzuschlagen die diesem
Matrizen. Stefan Keppeler. 28. November Mathematik I für Biologen, Geowissenschaftler und Geoökologen
 Mathematik I für Biologen, Geowissenschaftler und Geoökologen Matrizen 28. November 2007 Summe & Produkt Beispiel: Einwohnerzahlen Beispiel Addition Multiplikation Inverse Addition & Multiplikation Anwendung
Mathematik I für Biologen, Geowissenschaftler und Geoökologen Matrizen 28. November 2007 Summe & Produkt Beispiel: Einwohnerzahlen Beispiel Addition Multiplikation Inverse Addition & Multiplikation Anwendung
Klausuraufgaben zur Vorlesung Computer Vision. Prüfung I W772, I 2M54. Termin: 17. Juli bzw. 90 Minuten Maximal mögliche Punktzahl: 48
 Klausuraufgaben zur Vorlesung Computer Vision Prüfung I W772, I 2M54 Prüfer: Laubenheimer Termin: 17. Juli 2008 Beginn: 8:00 Uhr Dauer: 60 bzw. 90 Minuten Maximal mögliche Punktzahl: 48 Name Matrikelnummer
Klausuraufgaben zur Vorlesung Computer Vision Prüfung I W772, I 2M54 Prüfer: Laubenheimer Termin: 17. Juli 2008 Beginn: 8:00 Uhr Dauer: 60 bzw. 90 Minuten Maximal mögliche Punktzahl: 48 Name Matrikelnummer
Approximationsverfahren für die Kurvendarstellung
 Approximationsverfahren für die Kurvendarstellung (a) Bézier-Kurven spezielle Form polynomialer Kurven spezifiziert durch n+1 Kontrollpunkte P 0, P 1,..., P n Kurve läuft nicht durch alle Kontrollpunkte,
Approximationsverfahren für die Kurvendarstellung (a) Bézier-Kurven spezielle Form polynomialer Kurven spezifiziert durch n+1 Kontrollpunkte P 0, P 1,..., P n Kurve läuft nicht durch alle Kontrollpunkte,
Hausaufgabenüberprüfung 1 zu Mathematische Strukturen Hagen Knaf, SS 2016
 Hausaufgabenüberprüfung 1 zu Mathematische Strukturen Hagen Knaf, SS 2016 Lösungen Aufgabe 1: Betrachten Sie die Menge H aller Abbildungen f : R 2 R 2 der Form f(x) = Ax + b, A R 2 2, b R 2. (1) Zeigen
Hausaufgabenüberprüfung 1 zu Mathematische Strukturen Hagen Knaf, SS 2016 Lösungen Aufgabe 1: Betrachten Sie die Menge H aller Abbildungen f : R 2 R 2 der Form f(x) = Ax + b, A R 2 2, b R 2. (1) Zeigen
Einführung in die Systemtheorie
 Bernd Girod, Rudolf Rabenstein, Alexander Stenger Einführung in die Systemtheorie Signale und Systeme in der Elektrotechnik und Informationstechnik 4., durchgesehene und aktualisierte Auflage Mit 388 Abbildungen
Bernd Girod, Rudolf Rabenstein, Alexander Stenger Einführung in die Systemtheorie Signale und Systeme in der Elektrotechnik und Informationstechnik 4., durchgesehene und aktualisierte Auflage Mit 388 Abbildungen
- Sei r(x,y) Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.
 Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.") Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
4. Bildentrauschen: Filtertechniken 4. Bildentrauschen: Filtertechniken für additives Rauschen FILTER FILTER. B F = B + η
 4. Bildentrauschen: Filtertechniken 4. Bildentrauschen: Filtertechniken für additives Rauschen FILTER FILTER Originalbild B Verrauschtes Bild B F = Filter(B) + η FILTER: Scanner, digitale Cameras, Internetübertragung...
4. Bildentrauschen: Filtertechniken 4. Bildentrauschen: Filtertechniken für additives Rauschen FILTER FILTER Originalbild B Verrauschtes Bild B F = Filter(B) + η FILTER: Scanner, digitale Cameras, Internetübertragung...
9 Höhere partielle Ableitungen und die Taylorformel
 Vorlesung SS 29 Analsis 2 Prof Dr Siegfried Echterhoff 9 Höhere partielle Ableitungen und die Talorformel Definition 91 Sei U R n offen, f : U R m eine Funktion Dann heißt f 2-mal partiell differenzierbar,
Vorlesung SS 29 Analsis 2 Prof Dr Siegfried Echterhoff 9 Höhere partielle Ableitungen und die Talorformel Definition 91 Sei U R n offen, f : U R m eine Funktion Dann heißt f 2-mal partiell differenzierbar,
(Man sagt dafür auch, dass die Teilmenge U bezüglich der Gruppenoperationen abgeschlossen sein muss.)
") 3. Untergruppen 19 3. Untergruppen Nachdem wir nun einige grundlegende Gruppen kennengelernt haben, wollen wir in diesem Kapitel eine einfache Möglichkeit untersuchen, mit der man aus bereits bekannten
3. Untergruppen 19 3. Untergruppen Nachdem wir nun einige grundlegende Gruppen kennengelernt haben, wollen wir in diesem Kapitel eine einfache Möglichkeit untersuchen, mit der man aus bereits bekannten
Inhaltsbasierte Bildsuche. Matthias Spiller. 17. Dezember 2004
 Kantenbasierte Merkmale für die Bildsuche Inhaltsbasierte Bildsuche Matthias Spiller 17. Dezember 2004 Übersicht Übersicht Einleitung Was sind Kanten? Kantenrichtungs Histogramm Der Canny-Algorithmus Feature-Erzeugung
Kantenbasierte Merkmale für die Bildsuche Inhaltsbasierte Bildsuche Matthias Spiller 17. Dezember 2004 Übersicht Übersicht Einleitung Was sind Kanten? Kantenrichtungs Histogramm Der Canny-Algorithmus Feature-Erzeugung
Nachrichtentechnik [NAT] Kapitel 2: Zeitkontinuierliche Signale. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik
![Nachrichtentechnik [NAT] Kapitel 2: Zeitkontinuierliche Signale. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik](/thumbs/55/37142352.jpg "Nachrichtentechnik [NAT] Kapitel 2: Zeitkontinuierliche Signale. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik") Nachrichtentechnik [NAT] Kapitel 2: Zeitkontinuierliche Signale Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 25 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 2 Zeitkontinuierliche
Nachrichtentechnik [NAT] Kapitel 2: Zeitkontinuierliche Signale Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 25 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 2 Zeitkontinuierliche
Kybernetik LTI-Systeme
 Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV Regina Pohle. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV Regina Pohle. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
12.2 Grauwertmorphologie
 12.2 Grauwertmorphologie 735 12.2 Grauwertmorphologie 12.2 12.2.1 Punktmenge eines Grauwertbildes Die Punktmenge eines Binärbildes besteht aus allen Pixeln vom Wert 1.Wie lässt sich nun ein Bild, das mehr
12.2 Grauwertmorphologie 735 12.2 Grauwertmorphologie 12.2 12.2.1 Punktmenge eines Grauwertbildes Die Punktmenge eines Binärbildes besteht aus allen Pixeln vom Wert 1.Wie lässt sich nun ein Bild, das mehr
Prüfung Lineare Algebra , B := ( ), C := 1 1 0
, C := 1 1 0") 1. Es seien 1 0 2 0 0 1 3 0 A :=, B := ( 1 2 3 4 ), C := 1 1 0 0 1 0. 0 0 0 1 0 0 1 0 0 0 0 Welche der folgenden Aussagen ist richtig? A. A und C haben Stufenform, B nicht. B. A und B haben Stufenform,
1. Es seien 1 0 2 0 0 1 3 0 A :=, B := ( 1 2 3 4 ), C := 1 1 0 0 1 0. 0 0 0 1 0 0 1 0 0 0 0 Welche der folgenden Aussagen ist richtig? A. A und C haben Stufenform, B nicht. B. A und B haben Stufenform,
Mathematische Erfrischungen III - Vektoren und Matrizen
 Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
Grundlagen der Wahrscheinlichkeitstheorie und Statistik für Studierende der Informatik
 INSTITUT FÜR STOCHASTIK WS 2007/08 UNIVERSITÄT KARLSRUHE Blatt 1 Dr. B. Klar Übungen zur Vorlesung Grundlagen der Wahrscheinlichkeitstheorie und Statistik für Studierende der Informatik Musterlösungen
INSTITUT FÜR STOCHASTIK WS 2007/08 UNIVERSITÄT KARLSRUHE Blatt 1 Dr. B. Klar Übungen zur Vorlesung Grundlagen der Wahrscheinlichkeitstheorie und Statistik für Studierende der Informatik Musterlösungen
Signale und Systeme. Martin Werner
 Martin Werner Signale und Systeme Lehr- und Arbeitsbuch mit MATLAB -Übungen und Lösungen 3., vollständig überarbeitete und erweiterte Auflage Mit 256 Abbildungen, 48 Tabellen und zahlreichen Beispielen,
Martin Werner Signale und Systeme Lehr- und Arbeitsbuch mit MATLAB -Übungen und Lösungen 3., vollständig überarbeitete und erweiterte Auflage Mit 256 Abbildungen, 48 Tabellen und zahlreichen Beispielen,
Medizinische Bildverarbeitung. FH-Campus Hagenberg
 Medizinische Bildverarbeitung Campus Hagenberg 20 km nordöstlich von Linz 7 Bachelor-Studiengänge + 5 Masterstudiengänge 3 Cluster: Software / Systeme / Medien Medizin-Informatik, Bioinformatik Derzeit
Medizinische Bildverarbeitung Campus Hagenberg 20 km nordöstlich von Linz 7 Bachelor-Studiengänge + 5 Masterstudiengänge 3 Cluster: Software / Systeme / Medien Medizin-Informatik, Bioinformatik Derzeit
Lineare Algebra I. Prof. Dr. M. Rost. Übungen Blatt 2 (WS 2010/2011) Abgabetermin: Donnerstag, 28. Oktober.
 Abgabetermin: Donnerstag, 28. Oktober.") Lineare Algebra I Prof. Dr. M. Rost Übungen Blatt 2 (WS 2010/2011) Abgabetermin: Donnerstag, 28. Oktober http://www.math.uni-bielefeld.de/~rost/la1 Erinnerungen und Ergänzungen zur Vorlesung: Im Folgenden
Lineare Algebra I Prof. Dr. M. Rost Übungen Blatt 2 (WS 2010/2011) Abgabetermin: Donnerstag, 28. Oktober http://www.math.uni-bielefeld.de/~rost/la1 Erinnerungen und Ergänzungen zur Vorlesung: Im Folgenden
Übung: Computergrafik 1
 Prof. Dr. Andreas Butz Prof. Dr. Ing. Axel Hoppe Dipl.-Medieninf. Dominikus Baur Dipl.-Medieninf. Sebastian Boring Übung: Computergrafik 1 Fouriertransformation Organisatorisches Neue Abgabefrist für Blatt
Prof. Dr. Andreas Butz Prof. Dr. Ing. Axel Hoppe Dipl.-Medieninf. Dominikus Baur Dipl.-Medieninf. Sebastian Boring Übung: Computergrafik 1 Fouriertransformation Organisatorisches Neue Abgabefrist für Blatt
$Id: linabb.tex,v /01/09 13:27:34 hk Exp hk $
 Mathematik für Ingenieure I, WS 8/9 Freitag 9. $Id: linabb.tex,v.3 9//9 3:7:34 hk Exp hk $ II. Lineare Algebra 9 Lineare Abbildungen 9. Lineare Abbildungen Der folgende Satz gibt uns eine einfachere Möglichkeit
Mathematik für Ingenieure I, WS 8/9 Freitag 9. $Id: linabb.tex,v.3 9//9 3:7:34 hk Exp hk $ II. Lineare Algebra 9 Lineare Abbildungen 9. Lineare Abbildungen Der folgende Satz gibt uns eine einfachere Möglichkeit
Probleme bei der Bildverarbeitung. Digitale Bildverarbeitung. Charge-Coupled-Device Kameras. Beispiel Schärfentiefe
 Digitale Bildverarbeitung Keine Bildbearbeitung (z.b. Photoshop) Behandlung von zur Computergrafik inversen Problemen Erkennen von Objekten in Bildern sowie Bestimmung deren 2D (3D) Lage im Bild (im Raum)
Digitale Bildverarbeitung Keine Bildbearbeitung (z.b. Photoshop) Behandlung von zur Computergrafik inversen Problemen Erkennen von Objekten in Bildern sowie Bestimmung deren 2D (3D) Lage im Bild (im Raum)
3 Determinanten, Eigenwerte, Normalformen
 Determinanten, Eigenwerte, Normalformen.1 Determinanten Beispiel. Betrachte folgendes Parallelogramm in der Ebene R 2 : y (a + c, b + d) (c, d) (a, b) x Man rechnet leicht nach, dass die Fläche F dieses
Determinanten, Eigenwerte, Normalformen.1 Determinanten Beispiel. Betrachte folgendes Parallelogramm in der Ebene R 2 : y (a + c, b + d) (c, d) (a, b) x Man rechnet leicht nach, dass die Fläche F dieses
Einführung in das 6. Aufgabenblatt: Bildverarbeitung und Klassifkation
 Einführung in das 6. Aufgabenblatt: Bildverarbeitung und Klassifkation Philippe Dreuw dreuw@i6.informatik.rwth-aachen.de Praktikum im Grundstudium SS 2007 28. Juni 2007 Human Language Technology and Pattern
Einführung in das 6. Aufgabenblatt: Bildverarbeitung und Klassifkation Philippe Dreuw dreuw@i6.informatik.rwth-aachen.de Praktikum im Grundstudium SS 2007 28. Juni 2007 Human Language Technology and Pattern
Computergrafik / Animation. künstliches Objekt, dargestellt durch Anzahl von Punkten in Raum und Zeit (bei bewegten, animierten Objekten).
.") Computergrafik / Animation künstliches Objekt, dargestellt durch Anzahl von Punkten in Raum und Zeit (bei bewegten, animierten Objekten). Punkte, werden auch «Kontrollpunkte» genannt Wesentlicher Punkt:
Computergrafik / Animation künstliches Objekt, dargestellt durch Anzahl von Punkten in Raum und Zeit (bei bewegten, animierten Objekten). Punkte, werden auch «Kontrollpunkte» genannt Wesentlicher Punkt:
Digitale Bildverarbeitung
 Digitale Bildverarbeitung Prof. Dr. Sibylle Schwarz HTWK Leipzig, Fakultät IMN Gustav-Freytag-Str. 42a, 04277 Leipzig Zimmer Z 411 (Zuse-Bau) http://www.imn.htwk-leipzig.de/~schwarz sibylle.schwarz@htwk-leipzig.de
Digitale Bildverarbeitung Prof. Dr. Sibylle Schwarz HTWK Leipzig, Fakultät IMN Gustav-Freytag-Str. 42a, 04277 Leipzig Zimmer Z 411 (Zuse-Bau) http://www.imn.htwk-leipzig.de/~schwarz sibylle.schwarz@htwk-leipzig.de
,Faltung. Heavisidefunktion σ (t), Diracimpuls δ (t) Anwendungen. 1) Rechteckimpuls. 2) Sprungfunktionen. 3) Schaltvorgänge
, Diracimpuls δ (t) Anwendungen. 1) Rechteckimpuls. 2) Sprungfunktionen. 3) Schaltvorgänge") Heavisidefunktion σ (t), Diracimpuls δ (t),faltung Definition Heavisidefunktion, t > 0 σ ( t) = 0, t < 0 Anwendungen ) Rechteckimpuls, t < T r( t) = = σ ( t + T ) σ ( t T ) 0, t > T 2) Sprungfunktionen,
Heavisidefunktion σ (t), Diracimpuls δ (t),faltung Definition Heavisidefunktion, t > 0 σ ( t) = 0, t < 0 Anwendungen ) Rechteckimpuls, t < T r( t) = = σ ( t + T ) σ ( t T ) 0, t > T 2) Sprungfunktionen,
Vorlesung Mathematik 2 für Ingenieure (A)
") 1 Vorlesung Mathematik 2 für Ingenieure (A) Sommersemester 2017 Kapitel 8: Gewöhnliche Differenzialgleichungen Prof. Dr. Gerald Warnecke Nach Folienvorlage von Prof. Dr. Volker Kaibel Otto-von-Guericke
1 Vorlesung Mathematik 2 für Ingenieure (A) Sommersemester 2017 Kapitel 8: Gewöhnliche Differenzialgleichungen Prof. Dr. Gerald Warnecke Nach Folienvorlage von Prof. Dr. Volker Kaibel Otto-von-Guericke
Graphische Datenverarbeitung
 Graphische Datenverarbeitung Bildbearbeitung für Rasterbilder Übersicht l Neu Folien:, 28 und ab 56 l Maße zur Beurteilung von Bildern: l Histogramm l Entropie l Punktoperationen: l Lineare Veränderung
Graphische Datenverarbeitung Bildbearbeitung für Rasterbilder Übersicht l Neu Folien:, 28 und ab 56 l Maße zur Beurteilung von Bildern: l Histogramm l Entropie l Punktoperationen: l Lineare Veränderung
Kapitel III Ringe und Körper
 Kapitel III Ringe und Körper 1. Definitionen und Beispiele Definition 117 Eine Algebra A = S,,, 0, 1 mit zwei zweistelligen Operatoren und heißt ein Ring, falls R1. S,, 0 eine abelsche Gruppe mit neutralem
Kapitel III Ringe und Körper 1. Definitionen und Beispiele Definition 117 Eine Algebra A = S,,, 0, 1 mit zwei zweistelligen Operatoren und heißt ein Ring, falls R1. S,, 0 eine abelsche Gruppe mit neutralem
Distributed Algorithms. Image and Video Processing
 Chapter 7 High Dynamic Range (HDR) Distributed Algorithms for Quelle: wikipedia.org 2 1 High Dynamic Range bezeichnet ein hohes Kontrastverhältnis in einem Bild Kontrastverhältnis bei digitalem Bild: 1.000:1
Chapter 7 High Dynamic Range (HDR) Distributed Algorithms for Quelle: wikipedia.org 2 1 High Dynamic Range bezeichnet ein hohes Kontrastverhältnis in einem Bild Kontrastverhältnis bei digitalem Bild: 1.000:1