Motivation. Motivation 2
|
|
|
- Felix Gerstle
- vor 9 Jahren
- Abrufe
Transkript
1 Grenzzyklen 1
2 Motivation Grenzzyklen modellieren von selbst oszillierende Systeme Stabile Grenzzyklen kleine Abweichungen in den Anfangsbedingungen gehen in Grenzzyklus über Beispiele: Van-der-Pol Schwingkreis Glykol-Zyklus Motivation 2
3 Definition Grenzzykel = Isolierte, periodische Lsg (Trajektorie) eines autonomen DGL Systems x=f ( x) Im Phasenraum: geschlossene, isolierte Bahnkurve Nachbarkurven mit anderen Anfangsbedingungen sind nicht geschlossen, laufen im Limes t auf Bahnkurve zu/weg Stabil/Attraktor: Nachbarkurven laufen darauf zu Instabil/Repeller Nachbarkurven laufen weg 3
4 stabil instabil Semi-stabil 4
5 RLC Schwingkreis U L = L İ U C = Q C 0=U R +U L +U C L Ï +R İ+ I C =0 U R =R I ẍ+2 ĸ ẋ+x=0 homogene, lineare DGL 2. Ordnung leicht lösbar mit Exponentialansatz 5
6 Van der Pol Schwingkreis Kein linearer Widerstand mehr Spannung am Widerstand folgt nicht mehr ohmschem Gesetz DGL L Ï +ḟ (I ) + I C =0 f I İ U R =f (I), f (I)=nonlinear, f (I ) R I,f (I ) ai +b I f I a+2b I 2 6
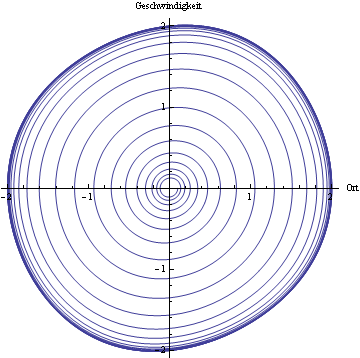
7 Van-der-Pol Oszillator LC-Schwingkreis mit nichtlinearem Dämpfungsterm Van der Pol Gleichung: Ï (t )+µ(i (t) 2 1) İ (t)+i (t )=0, µ 0 ẍ(t )+ µ( x( t) 2 1) ẋ(t )+ x (t)=0, µ 0 x >1 x²-1>0 normale, positive Dämpfung x <1 x²-1<0 negative Dämpfung Große Amplituden gedämpft, kleine Amplituden gepumpt selbsterhaltende Schwingung Periodische Bewegung geschlossene Bahnkurven im Phasenraum
8 µ=0.1
9 µ=1.5
10 µ=5
11 µ=10
12 Grenzzykel beim Schwingkreis Grenzzykel sind nichtlineares Phänomen bei linearen Systemen gibt es keine isolierten Trajektorien mit Vorfaktor ebenfalls geschl. Bahnkurve Grenzzykel weder beim linear gedämpften noch beim ungedämpften Schwingkreis/H.O. Kann man zeigen, dass der Van der Pol Oszillator einen stabilen Grenzzyklus besitzt? in 2D mit dem Liénard Theorem möglich!
13 Liénard Gleichung schwingende Systeme durch Lienard Gleichung beschreiben ẍ+f (x) ẋ+g (x)=0 Verallgemeinerung der Van der Pol Gleichung Mechanische Interpretation: Bewegungsgleichung einer Einheitsmasse mit nichtlinearer (vom Ort abh.) Dämpfung -f(x)x'(t) und nichtlinearer (vom Ort abh.) Rückstellkraft Feder im nicht homogenen viskosen Medium Rückstellkraft abh. von Dehnung der Feder
14 Liénard System Lienard Gleichung ist äquivalent zu folgendem System: ẋ= y ẏ= g(x) f (x) y
15 Liénard Theorem Das Lienard System hat genau einen stabilen Grenzzyklus falls 1. f(x) und g(x) überall stetig dfb sind 2. g(x) eine ungerade Funktion ist g(-x)=-g(x) 3. f(x) eine gerade Funktion ist f(-x)=f(x) 4. g(x)>0 für x>0 5. Die ungerade Funktion x F (x)= 0 hat f (u)du genau eine positive Nullstelle bei x=a, ist negativ für 0<x<a, positiv und nicht fallend für x>a, F(x) für x
16 Plausible Kriterien, da gilt rückstellende Kraft verhindert zu große Auslenkung aus Ruhelage Dämpfung hängt nur von x ab
17 Beispiel: Van der Pol Oszillator Z.z.: Van der Pol Oszillator hat genau einen stabilen Grenzzyklus x''(t) + µ(x²(t)-1)x'(t) + x(t)=0 x''(t) + f(x)x'(t) + g(x)= trivialerweise erfüllt 5.: x F (x)= 0 µ(u 2 1)du= 1 3 µ x (x2 3) Nullstellen bei x=0,x=± 3 einzig nichtnegative Nullstelle bei x=+ 3 Der Van der Pol Oszillator besitzt genau einen stabilen Grenzzyklus
18 Wie sieht bei Grenzzyklus Periode/Form aus? Meist nicht analytisch für alle Parameter lösbar Näherung für große/kleine Parameter Am Beispiel des Van der Pol Oszillators im stark nichtlinearen/schwach nichtlinearen Limes
19 Relaxationsoszillationen Van der Pol im stark nichtlinearen Limes µ>>1 nichtlinearer Term wird groß (x,y) als neue Phasenraumvariablen einführen Typisches Aussehen der Trajektorie im Phasenraum Periodendauer bestimmen ẋ=µ( y F (x)), ẏ= x µ F (x)= 1 3 x3 x
20 Trajektorie im (x,y)-phasenraum für y=f(x) Schneller Abschnitt Langsamer Abschnitt Intervall [D,A] y F (x) O(1) ẋ O(µ) 1, ẏ O( 1 µ ) y F (x) O( 1 µ 2 ) ẋ ẏ Intervall [A,B] ẋ 0, ẏ O( 1 µ )
21 Periodendauer berechnen Schnelle Abschnitte vernachlässigbar t T 2 B t A dt dt µ(x2 1) x 1 µ(x T 2 2 1) 2 x dx dx µ(3 2ln 2)
22 Schwach nichtlineare Oszillatoren Van der Pol im schwach nichtlinearen Limes allgemein: Gleichungen der Form h ist beliebige, glatte Funktion 0 ε<<1 ẍ(t)+x(t )+ε h(x, ẋ)=0 Stellen Störung des harmonischen Oszillators dar ẍ(t)+x(t )=0 2 bekannte Beispiele: Van der Pol Oszillator im schwach nichtlinearen Limes, Duffing Gleichung
23 Van der Pol im schwach nichtlinearen Limes ẍ+x+ε(x 2 1)ẋ=0 h(ẋ,x)=(x 2 1) ẋ Periodendauer und Aussehen der Trajektorie im Phasenraum
24 Lösungsansatz: normale Störungstheorie Annahme: ε<<1 bei der Lösung alle Terme mit Ο(ε²) vernachlässigen Taylorentwicklung der Lösung x(t,ε) x 0 (t)+x 1 (t)ε+o(ε 2 ) Störungstheoretischen Ansatz in die DGL einsetzen Nach Ordnung von ε gruppieren höhere Ordnungen von ε weglassen einfaches Gleichungssystem Anfangsbedingungen für x(t,ε) in x(t,ε) xº(t)+x¹(t)ε einsetzen Anfangsbedingungen für xº(t) und x¹(t) Gleichungssystem lösen für xº(t) und x¹(t) lösen Beide Lsg einsetzen in x(t, ε) x 0 (t)+x 1 (t )ε+o(ε 2 )
25 Versagen der Lösungsstrategie Annahme bei Taylorentwicklung: festgehaltenes t und sich entwickelndes ε funktioniert nur für kleine t sobald t weicht Lösung stark ab Bsp.: HO mit (schwacher), linearer Dämpfung (exakte Lösung bekannt) genäherte Lösung ist Anfang einer konvergenten Reihe für exakte Lösung Reihe wird abgebrochen bevor exponentieller Abfall berücksichtigt wird
26
27 2 Zeitskalen an der exakten Lösung x(t, ε)= 1 1 ε 2 e εt sin(t 1 ε 2 ) schnelle Zeitskala, t~o(1), Sinusoszillationen langsame Zeitskala, t~1/ε, exponentieller Abfall Grund für Abweichen der genäherten Lösung für t mind. 2 Zeitskalen nötig um Lösung zu nähern
28 µ=0.1
29 Two-Timing Statt Variable t für Zeit 2 Variablen τ für schnelle Zeitskala, dh für t~о(1), τ =t T für langsame Zeitskala, dh für t~о(1/ε), T=εt Wieder Lösung mit Reihenansatz nähern, diesmal aber mit x(t, ε)=x(τ,t ) x 0 (τ, T )+x 1 (τ, T )ε+o(ε 2 ) Reihenansatz wieder in DGL einsetzen und nach Ordnung von ε gruppieren (Ableitungen mit Kettenregel nach T,τ) 2 verschiedene DGL Lösung fertig
30
Exkurs: Method of multiple scales (Mehrskalen Methode)
") Exkurs: Method of multiple scales (Mehrskalen Methode) dr. karin mora* Im folgenden betrachten wir nichtlineare dynamische Systeme (NDS) mit sogenannten kleinen nichtlinearen Termen. Viele mathematische
Exkurs: Method of multiple scales (Mehrskalen Methode) dr. karin mora* Im folgenden betrachten wir nichtlineare dynamische Systeme (NDS) mit sogenannten kleinen nichtlinearen Termen. Viele mathematische
Ergebnis: Allg. Lösung der homogenen DGL ist Summe über alle Eigenlösungen: mit
 Zusammenfassung: Lineare DGL mit konstanten Koeffizienten (i) Suche Lösung für homogene DGL per Exponential-Ansatz: e-ansatz: Zeitabhängigkeit nur im Exponenten! zeitunabhängiger Vektor, Ergebnis: Allg.
Zusammenfassung: Lineare DGL mit konstanten Koeffizienten (i) Suche Lösung für homogene DGL per Exponential-Ansatz: e-ansatz: Zeitabhängigkeit nur im Exponenten! zeitunabhängiger Vektor, Ergebnis: Allg.
5. Vorlesung Wintersemester
 5. Vorlesung Wintersemester 1 Bewegung mit Stokes scher Reibung Ein dritter Weg, die Bewegungsgleichung bei Stokes scher Reibung zu lösen, ist die 1.1 Separation der Variablen m v = αv (1) Diese Methode
5. Vorlesung Wintersemester 1 Bewegung mit Stokes scher Reibung Ein dritter Weg, die Bewegungsgleichung bei Stokes scher Reibung zu lösen, ist die 1.1 Separation der Variablen m v = αv (1) Diese Methode
Stabile periodische Bewegungen (Grenzzyklen)
") Stabile periodische Bewegungen (Grenzzyklen) 1. Nichtlineare Systeme mit zwei Gleichungen Prinzipiell neu: Alle Systeme mit mindestens 2 unabhängigen DGL können als Lösungen geschlossene Kurven im Phasenraum
Stabile periodische Bewegungen (Grenzzyklen) 1. Nichtlineare Systeme mit zwei Gleichungen Prinzipiell neu: Alle Systeme mit mindestens 2 unabhängigen DGL können als Lösungen geschlossene Kurven im Phasenraum
Inhalt der Vorlesung A1
 PHYSIK Physik A/B1 A WS SS 17 13/14 Inhalt der Vorlesung A1 1. Einführung Methode der Physik Physikalische Größen Übersicht über die vorgesehenen Themenbereiche. Teilchen A. Einzelne Teilchen Beschreibung
PHYSIK Physik A/B1 A WS SS 17 13/14 Inhalt der Vorlesung A1 1. Einführung Methode der Physik Physikalische Größen Übersicht über die vorgesehenen Themenbereiche. Teilchen A. Einzelne Teilchen Beschreibung
1 Nicht-lineare dynamische Systeme
 1 Nicht-lineare dynamische Systeme 1.1 Charakteristika linerarer Systeme Superpositionsprinzip: Sind x 1 und x Lösungen eines linearen Systems, dann ist auch α 1 x 1 + α x eine Lösung. Berühmte Beispiele:
1 Nicht-lineare dynamische Systeme 1.1 Charakteristika linerarer Systeme Superpositionsprinzip: Sind x 1 und x Lösungen eines linearen Systems, dann ist auch α 1 x 1 + α x eine Lösung. Berühmte Beispiele:
C7 Differentgleichungen (DG) C7.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: Ort: Geschwindigkeit:
 C7.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: Ort: Geschwindigkeit:") C7 Differentgleichungen (DG) C7.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: (enthalten Ableitungen der gesuchten Funktionen) [Stoffgliederung im Skript für Kapitel
C7 Differentgleichungen (DG) C7.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: (enthalten Ableitungen der gesuchten Funktionen) [Stoffgliederung im Skript für Kapitel
Resonanz Versuchsvorbereitung
 Versuche P1-1,, Resonanz Versuchsvorbereitung Thomas Keck, Gruppe: Mo-3 Karlsruhe Institut für Technologie, Bachelor Physik Versuchstag: 0.1.010 1 1 Vorwort Im Praktikumsversuch,,Resonanz geht es um freie
Versuche P1-1,, Resonanz Versuchsvorbereitung Thomas Keck, Gruppe: Mo-3 Karlsruhe Institut für Technologie, Bachelor Physik Versuchstag: 0.1.010 1 1 Vorwort Im Praktikumsversuch,,Resonanz geht es um freie
F R. = Dx. M a = Dx. Ungedämpfte freie Schwingungen Beispiel Federpendel (a) in Ruhe (b) gespannt: Auslenkung x Rückstellkraft der Feder
 in Ruhe (b) gespannt: Auslenkung x Rückstellkraft der Feder") 6. Schwingungen Schwingungen Schwingung: räumlich und zeitlich wiederkehrender (=periodischer) Vorgang Zu besprechen: ungedämpfte freie Schwingung gedämpfte freie Schwingung erzwungene gedämpfte Schwingung
6. Schwingungen Schwingungen Schwingung: räumlich und zeitlich wiederkehrender (=periodischer) Vorgang Zu besprechen: ungedämpfte freie Schwingung gedämpfte freie Schwingung erzwungene gedämpfte Schwingung
Lineare und nichtlineare Schwingungen und Wellen
 Lineare und nichtlineare Schwingungen und Wellen Von Prof. Dr. sc. nat. ETH Fritz Kurt Kneubühl Eidgenössische Technische Hochschule Zürich unter Mitwirkung von Dr. sc. nat. ETH Damien Philippe Scherrer
Lineare und nichtlineare Schwingungen und Wellen Von Prof. Dr. sc. nat. ETH Fritz Kurt Kneubühl Eidgenössische Technische Hochschule Zürich unter Mitwirkung von Dr. sc. nat. ETH Damien Philippe Scherrer
Anwendung: Gedämpfter, getriebener harmonischer Oszillator Unendlich viele Anwendungen in der Physik, auch außerhalb der Mechanik!
 Anwendung: Gedämpfter, getriebener harmonischer Oszillator Unendlich viele Anwendungen in der Physik, auch außerhalb der Mechanik! Bewegungsgleichung: Dämpfungsrate: Einheit: Kreisfrequenz des Oszillators:
Anwendung: Gedämpfter, getriebener harmonischer Oszillator Unendlich viele Anwendungen in der Physik, auch außerhalb der Mechanik! Bewegungsgleichung: Dämpfungsrate: Einheit: Kreisfrequenz des Oszillators:
Probestudium der Physik 2011/12
 Probestudium der Physik 2011/12 Karsten Kruse 2. Mechanische Schwingungen und Wellen - Theoretische Betrachtungen 2.1 Der harmonische Oszillator Wir betrachten eine lineare Feder mit der Ruhelänge l 0.
Probestudium der Physik 2011/12 Karsten Kruse 2. Mechanische Schwingungen und Wellen - Theoretische Betrachtungen 2.1 Der harmonische Oszillator Wir betrachten eine lineare Feder mit der Ruhelänge l 0.
Differenzialgleichungen
 Mathematik I für Biologen, Geowissenschaftler und Geoökologen 30. Januar 2008 (System von) Differenzialgleichung(en) Schwingungsgleichung Newtonsche Mechanik Populationsdynamik...DGLn höherer Ordnung auf
Mathematik I für Biologen, Geowissenschaftler und Geoökologen 30. Januar 2008 (System von) Differenzialgleichung(en) Schwingungsgleichung Newtonsche Mechanik Populationsdynamik...DGLn höherer Ordnung auf
4.2 Der Harmonische Oszillator
 Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Kapitel 8: Gewöhnliche Differentialgleichungen 8.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2.
 Kapitel 8: Gewöhnliche Differentialgleichungen 8.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: (enthalten Ableitungen der gesuchten Funktionen) Geschwindigkeit:
Kapitel 8: Gewöhnliche Differentialgleichungen 8.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: (enthalten Ableitungen der gesuchten Funktionen) Geschwindigkeit:
Hochschule Düsseldorf University of Applied Sciences. 12. Januar 2017 HSD. Physik. Schwingungen III
 Physik Schwingungen III Wiederholung Komplexe Zahlen Harmonischer Oszillator DGL Getrieben Gedämpft Komplexe Zahlen Eulersche Formel e i' = cos ' + i sin ' Komplexe Schwingung e i!t = cos!t + i sin!t Schwingung
Physik Schwingungen III Wiederholung Komplexe Zahlen Harmonischer Oszillator DGL Getrieben Gedämpft Komplexe Zahlen Eulersche Formel e i' = cos ' + i sin ' Komplexe Schwingung e i!t = cos!t + i sin!t Schwingung
Lösungen der Aufgaben zu Kapitel 9
 Lösungen der Aufgaben zu Kapitel 9 Abschnitt 9. Aufgabe a) Wir bestimmen die ersten Ableitungen von f, die uns dann das Aussehen der k-ten Ableitung erkennen lassen: fx) = x + e x xe x, f x) = e x e x
Lösungen der Aufgaben zu Kapitel 9 Abschnitt 9. Aufgabe a) Wir bestimmen die ersten Ableitungen von f, die uns dann das Aussehen der k-ten Ableitung erkennen lassen: fx) = x + e x xe x, f x) = e x e x
Probestudium der Physik 2011/12
 Probestudium der Physik 2011/12 1 Schwingungen und Wellen: Einführung in die mathematischen Grundlagen 1.1 Die Sinus- und die Kosinusfunktion Die Sinusfunktion lässt sich genauso wie die Kosinusfunktion
Probestudium der Physik 2011/12 1 Schwingungen und Wellen: Einführung in die mathematischen Grundlagen 1.1 Die Sinus- und die Kosinusfunktion Die Sinusfunktion lässt sich genauso wie die Kosinusfunktion
2.9 Gedämpfter Harmonischer Oszillator
 72 KAPITEL 2. DYNAMIK EINES MASSENPUNKTES 2.9 Gedämpfter Harmonischer Oszillator In diesem Abschnitt wollen wir die Bewegung eines Massenpunktes betrachten, der sich in einer Raumrichtung x in einer Harmonischen
72 KAPITEL 2. DYNAMIK EINES MASSENPUNKTES 2.9 Gedämpfter Harmonischer Oszillator In diesem Abschnitt wollen wir die Bewegung eines Massenpunktes betrachten, der sich in einer Raumrichtung x in einer Harmonischen
Anwendung: gedämpfter harmonischer Oszillator (ohne Antrieb) Exponentialansatz: Eigenwertproblem: Charakteristisches Polynom: Zwischenbemerkung:
 Exponentialansatz: Eigenwertproblem: Charakteristisches Polynom: Zwischenbemerkung:") Anwendung: gedämpfter harmonischer Oszillator (ohne Antrieb) Exponentialansatz: Eigenwertproblem: Charakteristisches Polynom: Zwischenbemerkung: (3q.6) folgt auch direkt, wenn ein exp-ansatz für x(t),
Anwendung: gedämpfter harmonischer Oszillator (ohne Antrieb) Exponentialansatz: Eigenwertproblem: Charakteristisches Polynom: Zwischenbemerkung: (3q.6) folgt auch direkt, wenn ein exp-ansatz für x(t),
Beispiele zu Teil 3: Differentialgleichungen
 Beispiele zu Teil 3: Differentialgleichungen 1. Geben Sie die Ordnung der nachstehenden DGL an und geben Sie an ob die DGL in ihrer impliziten oder in ihrer expliziten Form vorliegt. x 2 tx 2 0 xx t 0
Beispiele zu Teil 3: Differentialgleichungen 1. Geben Sie die Ordnung der nachstehenden DGL an und geben Sie an ob die DGL in ihrer impliziten oder in ihrer expliziten Form vorliegt. x 2 tx 2 0 xx t 0
Kleine Schwingungen vieler Freiheitsgrade
 Kleine Schwingungen vieler Freiheitsgrade Betrachte System mit f Freiheitsgraden: (z.b. N Teilchen in 3 Dim.: ) Koordinaten: Geschwindigkeiten: Kinetische Energie: "Massenmatrix" Nebenbemerkung: Bei fortgeschrittenen
Kleine Schwingungen vieler Freiheitsgrade Betrachte System mit f Freiheitsgraden: (z.b. N Teilchen in 3 Dim.: ) Koordinaten: Geschwindigkeiten: Kinetische Energie: "Massenmatrix" Nebenbemerkung: Bei fortgeschrittenen
Nichtlineare Dynamik Einführung
 Nichtlineare Dynamik Einführung Tobias Kerscher gekürzte Internetversion (ohne fremde Bilder) Sommerakademie Ftan 2004, 13. August Gliederung 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische
Nichtlineare Dynamik Einführung Tobias Kerscher gekürzte Internetversion (ohne fremde Bilder) Sommerakademie Ftan 2004, 13. August Gliederung 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische
Kleine Schwingungen vieler Freiheitsgrade
 Kleine Schwingungen vieler Freiheitsgrade Betrachte System mit f Freiheitsgraden: (z.b. N Teilchen in 3 Dim.: f = 3N) Koordinaten: Geschwindigkeiten: Kinetische Energie: "Massenmatrix" Nebenbemerkung:
Kleine Schwingungen vieler Freiheitsgrade Betrachte System mit f Freiheitsgraden: (z.b. N Teilchen in 3 Dim.: f = 3N) Koordinaten: Geschwindigkeiten: Kinetische Energie: "Massenmatrix" Nebenbemerkung:
PROBEPRÜFUNG MATHEMATIK I UND II
 PROBEPRÜFUNG MATHEMATIK I UND II für die Studiengänge Agrar-, Erd-, Lebensmittelund Umweltnaturwissenschaften Für diese Probeprüfung sind ca 4 Stunden vorgesehen. Die eigentliche Prüfung wird signifikant
PROBEPRÜFUNG MATHEMATIK I UND II für die Studiengänge Agrar-, Erd-, Lebensmittelund Umweltnaturwissenschaften Für diese Probeprüfung sind ca 4 Stunden vorgesehen. Die eigentliche Prüfung wird signifikant
Flüsse, Fixpunkte, Stabilität
 1 Flüsse, Fixpunkte, Stabilität Proseminar: Theoretische Physik Yannic Borchard 7. Mai 2014 2 Motivation Die hier entwickelten Formalismen erlauben es, Aussagen über das Verhalten von Lösungen gewöhnlicher
1 Flüsse, Fixpunkte, Stabilität Proseminar: Theoretische Physik Yannic Borchard 7. Mai 2014 2 Motivation Die hier entwickelten Formalismen erlauben es, Aussagen über das Verhalten von Lösungen gewöhnlicher
Dynamisches Chaos. 1. Einleitung: Determinismus und Chaos
 Dynamisches Chaos 1. Einleitung: Determinismus und Chaos In der üblichen Betrachtungsweise ist der Zufall nur auf dem Mikroniveau erlaubt: - das Boltzmannsche molekulare Chaos; - die quantenmechanischen
Dynamisches Chaos 1. Einleitung: Determinismus und Chaos In der üblichen Betrachtungsweise ist der Zufall nur auf dem Mikroniveau erlaubt: - das Boltzmannsche molekulare Chaos; - die quantenmechanischen
Prüfungsvorbereitungskurs Höhere Mathematik 3
 Prüfungsvorbereitungskurs Höhere Mathematik 3 Gewöhnliche Differentialgleichungen Marco Boßle Jörg Hörner Mathematik Online Frühjahr 2011 PV-Kurs HM 3 Gew. DGl 1-1 Zusammenfassung y (x) = F (x, y) Allgemeine
Prüfungsvorbereitungskurs Höhere Mathematik 3 Gewöhnliche Differentialgleichungen Marco Boßle Jörg Hörner Mathematik Online Frühjahr 2011 PV-Kurs HM 3 Gew. DGl 1-1 Zusammenfassung y (x) = F (x, y) Allgemeine
11.4. Lineare Differentialgleichungen höherer Ordnung
 4 Lineare Differentialgleichungen höherer Ordnung Bei vielen geometrischen, physikalischen und technischen Problemen hat man nicht nur eine Funktion (in einer Variablen) und ihre Ableitung zueinander in
4 Lineare Differentialgleichungen höherer Ordnung Bei vielen geometrischen, physikalischen und technischen Problemen hat man nicht nur eine Funktion (in einer Variablen) und ihre Ableitung zueinander in
Übungen zur Theoretischen Physik 2 Lösungen zu Blatt 1
 Prof.. Greiner, Dr. H. van Hees Sommersemester 214 Übungen zur Theoretischen Physi 2 Lösungen zu Blatt 1 Aufgabe 1: Differentialoperatoren der Vetoranalysis (a) Aus der Definition des Nabla-Operators folgt
Prof.. Greiner, Dr. H. van Hees Sommersemester 214 Übungen zur Theoretischen Physi 2 Lösungen zu Blatt 1 Aufgabe 1: Differentialoperatoren der Vetoranalysis (a) Aus der Definition des Nabla-Operators folgt
Hamilton-Systeme. J. Struckmeier
 Invarianten für zeitabhängige Hamilton-Systeme J. Struckmeier Vortrag im Rahmen des Winterseminars des Instituts für Angewandte Physik der Johann-Wolfgang-Goethe-Universität Frankfurt a.m. Hirschegg, 04.
Invarianten für zeitabhängige Hamilton-Systeme J. Struckmeier Vortrag im Rahmen des Winterseminars des Instituts für Angewandte Physik der Johann-Wolfgang-Goethe-Universität Frankfurt a.m. Hirschegg, 04.
9.4 Lineare gewöhnliche DGL
 9.4 Lineare gewöhnliche DGL Allgemeinste Form einer gewöhnlichen DGL: Falls linear in ist, sprechen wir von einer "linearen" DGL: und eine Matrix zeitabhängigen Komponenten ein zeitabhängiger Vektor In
9.4 Lineare gewöhnliche DGL Allgemeinste Form einer gewöhnlichen DGL: Falls linear in ist, sprechen wir von einer "linearen" DGL: und eine Matrix zeitabhängigen Komponenten ein zeitabhängiger Vektor In
8. Periodische Bewegungen
 8. Periodische Bewegungen 8.1 Schwingungen 8.1.1 Harmonische Schwingung 8.1.2 Schwingungsenergie 9.1.3 Gedämpfte Schwingung 8.1.4 Erzwungene Schwingung 8. Periodische Bewegungen Schwingung Zustand y wiederholt
8. Periodische Bewegungen 8.1 Schwingungen 8.1.1 Harmonische Schwingung 8.1.2 Schwingungsenergie 9.1.3 Gedämpfte Schwingung 8.1.4 Erzwungene Schwingung 8. Periodische Bewegungen Schwingung Zustand y wiederholt
Partielle Differentialgleichungen
 Partielle Differentialgleichungen Definition. Eine partielle Differentialgleichung ist eine Dgl., in der partielle Ableitungen einer gesuchten Funktion z = z(x 1, x 2,..., x n ) mehrerer unabhängiger Variabler
Partielle Differentialgleichungen Definition. Eine partielle Differentialgleichung ist eine Dgl., in der partielle Ableitungen einer gesuchten Funktion z = z(x 1, x 2,..., x n ) mehrerer unabhängiger Variabler
Serie 13: Online Test
 D-ERDW, D-HEST, D-USYS Mathematik I HS 13 Dr. Ana Cannas Serie 13: Online Test Einsendeschluss: 31. Januar 214 Bei allen Aufgaben ist genau eine Antwort richtig. Lösens des Tests eine Formelsammlung verwenden.
D-ERDW, D-HEST, D-USYS Mathematik I HS 13 Dr. Ana Cannas Serie 13: Online Test Einsendeschluss: 31. Januar 214 Bei allen Aufgaben ist genau eine Antwort richtig. Lösens des Tests eine Formelsammlung verwenden.
Thema 10 Gewöhnliche Differentialgleichungen
 Thema 10 Gewöhnliche Differentialgleichungen Viele Naturgesetze stellen eine Beziehung zwischen einer physikalischen Größe und ihren Ableitungen (etwa als Funktion der Zeit dar: 1. ẍ = g (freier Fall;
Thema 10 Gewöhnliche Differentialgleichungen Viele Naturgesetze stellen eine Beziehung zwischen einer physikalischen Größe und ihren Ableitungen (etwa als Funktion der Zeit dar: 1. ẍ = g (freier Fall;
Übungen zum Ferienkurs Analysis II
 Übungen zum Ferienkurs Analysis II Implizite Funktionen und Differentialgleichungen 4.1 Umkehrbarkeit Man betrachte die durch g(s, t) = (e s cos(t), e s sin(t)) gegebene Funktion g : R 2 R 2. Zeigen Sie,
Übungen zum Ferienkurs Analysis II Implizite Funktionen und Differentialgleichungen 4.1 Umkehrbarkeit Man betrachte die durch g(s, t) = (e s cos(t), e s sin(t)) gegebene Funktion g : R 2 R 2. Zeigen Sie,
Gewöhnliche Dierentialgleichungen
 Gewöhnliche Dierentialgleichungen sind Gleichungen, die eine Funktion mit ihren Ableitungen verknüpfen. Denition Eine explizite Dierentialgleichung (DGL) nter Ordnung für die reelle Funktion t x(t) hat
Gewöhnliche Dierentialgleichungen sind Gleichungen, die eine Funktion mit ihren Ableitungen verknüpfen. Denition Eine explizite Dierentialgleichung (DGL) nter Ordnung für die reelle Funktion t x(t) hat
System von n gewöhnlichen DG 1. Ordnung hat die allgemeine Form:
 C7.5 Differentialgleichungen 1. Ordnung - Allgemeine Aussagen System von n gewöhnlichen DG 1. Ordnung hat die allgemeine Form: Kompaktnotation: Anfangsbedingung: Gesuchte Lösung: Gleichungen dieser Art
C7.5 Differentialgleichungen 1. Ordnung - Allgemeine Aussagen System von n gewöhnlichen DG 1. Ordnung hat die allgemeine Form: Kompaktnotation: Anfangsbedingung: Gesuchte Lösung: Gleichungen dieser Art
Musterlösung. TECHNISCHE UNIVERSITÄT MÜNCHEN Fakultät für Mathematik. Klausur Mathematik für Physiker 3 (Analysis 2) I... II...
 I... II...") ................ Note I II Name Vorname 1 Matrikelnummer Studiengang (Hauptfach) Fachrichtung (Nebenfach) 2 3 Unterschrift der Kandidatin/des Kandidaten 4 TECHNISCHE UNIVERSITÄT MÜNCHEN Fakultät für Mathematik
................ Note I II Name Vorname 1 Matrikelnummer Studiengang (Hauptfach) Fachrichtung (Nebenfach) 2 3 Unterschrift der Kandidatin/des Kandidaten 4 TECHNISCHE UNIVERSITÄT MÜNCHEN Fakultät für Mathematik
Blatt 11.1: Fourier-Integrale, Differentialgleichungen
 Fakultät für Physik R: Rechenmethoden für Physiker, WiSe 204/5 Dozent: Jan von Delft Übungen: Benedikt Bruognolo, Katharina Stadler http://homepages.physik.uni-muenchen.de/~vondelft/lehre/4t0/ Blatt.:
Fakultät für Physik R: Rechenmethoden für Physiker, WiSe 204/5 Dozent: Jan von Delft Übungen: Benedikt Bruognolo, Katharina Stadler http://homepages.physik.uni-muenchen.de/~vondelft/lehre/4t0/ Blatt.:
( ) Dann gilt f(x) g(x) in der Nähe von x 0, das heisst. Für den Fehler r(h) dieser Näherung erhält man unter Verwendung von ( )
 Dann gilt f(x) g(x) in der Nähe von x 0, das heisst. Für den Fehler r(h) dieser Näherung erhält man unter Verwendung von ( )") 64 Die Tangente in x 0 eignet sich also als lokale (lineare) Näherung der Funktion in der Nähe des Punktes P. Oder gibt es eine noch besser approximierende Gerade? Satz 4.9 Unter allen Geraden durch den
64 Die Tangente in x 0 eignet sich also als lokale (lineare) Näherung der Funktion in der Nähe des Punktes P. Oder gibt es eine noch besser approximierende Gerade? Satz 4.9 Unter allen Geraden durch den
Theoretische Physik 2 (Theoretische Mechanik)
") Theoretische Physik 2 (Theoretische Mechanik) Prof. Dr. Th. Feldmann 15. Januar 2014 Kurzzusammenfassung Vorlesung 21 vom 14.1.2014 6. Hamilton-Mechanik Zusammenfassung Lagrange-Formalismus: (generalisierte)
Theoretische Physik 2 (Theoretische Mechanik) Prof. Dr. Th. Feldmann 15. Januar 2014 Kurzzusammenfassung Vorlesung 21 vom 14.1.2014 6. Hamilton-Mechanik Zusammenfassung Lagrange-Formalismus: (generalisierte)
6 Der Harmonische Oszillator
 6 Der Harmonische Oszillator Ein Teilchen der Masse m bewege sich auf der x-achse unter dem Einfluß der Rückstellkraft Fx = mω x. 186 Die Kreisfrequenz ω bzw. die Federkonstante k := mω ist neben der Masse
6 Der Harmonische Oszillator Ein Teilchen der Masse m bewege sich auf der x-achse unter dem Einfluß der Rückstellkraft Fx = mω x. 186 Die Kreisfrequenz ω bzw. die Federkonstante k := mω ist neben der Masse
Lösungen zu Mathematik I/II
 Dr. A. Caspar ETH Zürich, August D BIOL, D CHAB Lösungen zu Mathematik I/II Aufgaben. ( Punkte) a) Wir berechnen lim sin(x ) x 3 + 4x L Hôpital = lim x cos(x ) 3x + 8x = 4. b) Wir benutzen L Hôpital lim
Dr. A. Caspar ETH Zürich, August D BIOL, D CHAB Lösungen zu Mathematik I/II Aufgaben. ( Punkte) a) Wir berechnen lim sin(x ) x 3 + 4x L Hôpital = lim x cos(x ) 3x + 8x = 4. b) Wir benutzen L Hôpital lim
12 Gewöhnliche Differentialgleichungen
 2 2 Gewöhnliche Differentialgleichungen 2. Einleitung Sei f : D R wobei D R 2. Dann nennt man y = f(x, y) (5) eine (gewöhnliche) Differentialgleichung (DGL) erster Ordnung. Als Lösung von (5) akzeptiert
2 2 Gewöhnliche Differentialgleichungen 2. Einleitung Sei f : D R wobei D R 2. Dann nennt man y = f(x, y) (5) eine (gewöhnliche) Differentialgleichung (DGL) erster Ordnung. Als Lösung von (5) akzeptiert
Lösungen zu Mathematik I/II
 Dr. A. Caspar ETH Zürich, Januar D BIOL, D CHAB Lösungen zu Mathematik I/II. ( Punkte) a) Wir benutzen L Hôpital lim x ln(x) L Hôpital x 3 = lim 3x + x L Hôpital = lim x ln(x) x 3x 3 = lim ln(x) x 3 x
Dr. A. Caspar ETH Zürich, Januar D BIOL, D CHAB Lösungen zu Mathematik I/II. ( Punkte) a) Wir benutzen L Hôpital lim x ln(x) L Hôpital x 3 = lim 3x + x L Hôpital = lim x ln(x) x 3x 3 = lim ln(x) x 3 x
5 Gewöhnliche Differentialgleichungen
 5 Gewöhnliche Differentialgleichungen 5.1 Einleitung & Begriffsbildung Slide 223 Natürliches Wachstum Eine Population bestehe zur Zeit t aus N(t) Individuen. Die Population habe konstante Geburts- und
5 Gewöhnliche Differentialgleichungen 5.1 Einleitung & Begriffsbildung Slide 223 Natürliches Wachstum Eine Population bestehe zur Zeit t aus N(t) Individuen. Die Population habe konstante Geburts- und
Differentialgleichungen 2. Ordnung
 Differentialgleichungen 2. Ordnung 1-E1 1-E2 Einführendes Beispiel Freier Fall Viele Geschichten ranken sich um den schiefen Turm von Pisa: Der Legende nach hat der aus Pisa stammende Galileo Galilei bei
Differentialgleichungen 2. Ordnung 1-E1 1-E2 Einführendes Beispiel Freier Fall Viele Geschichten ranken sich um den schiefen Turm von Pisa: Der Legende nach hat der aus Pisa stammende Galileo Galilei bei
D-MAVT/D-MATL Analysis II FS 2017 Dr. Andreas Steiger. Lösung - Serie 26. ẋ 1 = x 1 + 2x ẋ 2 = 2x 1 + x 2
 D-MAVT/D-MATL Analysis II FS 07 Dr. Andreas Steiger Lösung - Serie 6. Es ist das folgende autonome System ẋ = x + x + 3 ẋ = x + x von linearen Differenzialgleichungen. Ordung gegeben. Welche der folgenden
D-MAVT/D-MATL Analysis II FS 07 Dr. Andreas Steiger Lösung - Serie 6. Es ist das folgende autonome System ẋ = x + x + 3 ẋ = x + x von linearen Differenzialgleichungen. Ordung gegeben. Welche der folgenden
Serie 9, Musterlösung. Klasse: 2Ub Semester: 2 Datum: 30. Mai z 3 = i z 4 = 15 Z 4 Z Re(z) z 4 = 1 e i 7π 4
 z 4 = 1 e i 7π 4") anu [email protected] www.adams-science.com Serie 9, Musterlösung Klasse: Ub Semester: Datum: 3. Mai 17 1. Die komplee Zahlenebene Stelle die Zahlen als Punkte in der kompleen Zahlenebene dar. Berechne
anu [email protected] www.adams-science.com Serie 9, Musterlösung Klasse: Ub Semester: Datum: 3. Mai 17 1. Die komplee Zahlenebene Stelle die Zahlen als Punkte in der kompleen Zahlenebene dar. Berechne
11. Nichtlineare Dynamik und Chaos. Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt.
 11. Nichtlineare Dynamik und Chaos Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt. der Auslenkung Fadenlänge L, Masse m, Auslenkwinkel φ Rücktreibende Kraft: Beschleunigung:
11. Nichtlineare Dynamik und Chaos Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt. der Auslenkung Fadenlänge L, Masse m, Auslenkwinkel φ Rücktreibende Kraft: Beschleunigung:
Serie 13. Analysis D-BAUG Dr. Cornelia Busch FS 2016
 Analysis D-BAUG Dr. Cornelia Busch FS 2016 Serie 13 1. Prüfungsaufgabe 4, Winter 2014. Bestimmen Sie die Funktion, für die gilt: An jeder Stelle des Definitionsbereichs ist die Steigung des Graphen der
Analysis D-BAUG Dr. Cornelia Busch FS 2016 Serie 13 1. Prüfungsaufgabe 4, Winter 2014. Bestimmen Sie die Funktion, für die gilt: An jeder Stelle des Definitionsbereichs ist die Steigung des Graphen der
Experimentalphysik E1
 Experimentalphysik E1 Gedämpfte & erzwungene Schwingungen Alle Informationen zur Vorlesung unter : http://www.physik.lmu.de/lehre/vorlesungen/index.html 16. Dez. 16 Harmonische Schwingungen Auslenkung
Experimentalphysik E1 Gedämpfte & erzwungene Schwingungen Alle Informationen zur Vorlesung unter : http://www.physik.lmu.de/lehre/vorlesungen/index.html 16. Dez. 16 Harmonische Schwingungen Auslenkung
12.6 Aufgaben zur Laplace-Transformation
 292 12. Aufgaben zu linearen Gleichungen 12.6 Aufgaben zur Laplace-Tranformation A B C D Man löe die folgenden Anfangwertprobleme durch Laplace-Tranformation: 1) ẍ ẋ x = ; x() = ẋ() = 1 2) x (3) 6ẍ + 12ẋ
292 12. Aufgaben zu linearen Gleichungen 12.6 Aufgaben zur Laplace-Tranformation A B C D Man löe die folgenden Anfangwertprobleme durch Laplace-Tranformation: 1) ẍ ẋ x = ; x() = ẋ() = 1 2) x (3) 6ẍ + 12ẋ
4.7 Lineare Systeme 1. Ordnung
 3. Die allgemeine Lösung der inhomogenen Differentialgleichung lautet damit yx = y hom x + y inh x = c x + c 2 x + 8 x + 4 xlnx2 4 xlnx = C x + C 2 x + 4 xlnx2 4 xlnx. Wir haben c 2 + 8 zu C 2 zusammengefasst.
3. Die allgemeine Lösung der inhomogenen Differentialgleichung lautet damit yx = y hom x + y inh x = c x + c 2 x + 8 x + 4 xlnx2 4 xlnx = C x + C 2 x + 4 xlnx2 4 xlnx. Wir haben c 2 + 8 zu C 2 zusammengefasst.
Gewöhnliche Differentialgleichungen am Beispiel des harmonischen Oszillators
 Gewöhnliche Differentialgleichungen am Beispiel des harmonischen Oszillators Horst Laschinsky 12. Oktober 1999 Inhaltsverzeichnis 1 Gewöhnliche lineare homogene Differentialgleichungen 2. Ordnung mit konstanten
Gewöhnliche Differentialgleichungen am Beispiel des harmonischen Oszillators Horst Laschinsky 12. Oktober 1999 Inhaltsverzeichnis 1 Gewöhnliche lineare homogene Differentialgleichungen 2. Ordnung mit konstanten
Vorbereitung: Pendel. Marcel Köpke Gruppe
 Vorbereitung: Pendel Marcel Köpke Gruppe 7 10.1.011 Inhaltsverzeichnis 1 Augabe 1 3 1.1 Physikalisches Pendel.............................. 3 1. Reversionspendel................................ 6 Aufgabe
Vorbereitung: Pendel Marcel Köpke Gruppe 7 10.1.011 Inhaltsverzeichnis 1 Augabe 1 3 1.1 Physikalisches Pendel.............................. 3 1. Reversionspendel................................ 6 Aufgabe
Differentialgleichungen WS 2013/ Übungsblatt. und y(x) = cos(x) x
 = cos(x) x") Differentialgleichungen WS 2013/2014 1. Übungsblatt 1. Zeigen Sie, dass y(x) = sin(x) x und y(x) = cos(x) x Lösungen der Bessel-Gleichung sind. x 2 y +xy +(x 2 1 4 )y = 0 2. Konstruieren Sie zu dem Anfangswertproblem
Differentialgleichungen WS 2013/2014 1. Übungsblatt 1. Zeigen Sie, dass y(x) = sin(x) x und y(x) = cos(x) x Lösungen der Bessel-Gleichung sind. x 2 y +xy +(x 2 1 4 )y = 0 2. Konstruieren Sie zu dem Anfangswertproblem
T0: Rechenmethoden WiSe 2011/12. Lösungen: Ergänzungsaufgaben zur Klausurvorbereitung Differentialgleichungen
 T0: Rechenmethoden WiSe 20/2 Prof. Jan von Delft http://homepages.physik.uni-muenchen.de/~vondelft/lehre/2t0/ Lösungen: Ergänzungsaufgaben zur Klausurvorbereitung Differentialgleichungen Aufgabe. (**)
T0: Rechenmethoden WiSe 20/2 Prof. Jan von Delft http://homepages.physik.uni-muenchen.de/~vondelft/lehre/2t0/ Lösungen: Ergänzungsaufgaben zur Klausurvorbereitung Differentialgleichungen Aufgabe. (**)
Biologische Oszillatoren und Schalter - Teil 1
 Biologische Oszillatoren und Schalter - Teil 1 Elena Süs 11.12.2012 Literatur: J.D. Murray: Mathematical Biology: I. An Introduction, Third Edition, Springer Gliederung 1 Motivation 2 Historische Entwicklung
Biologische Oszillatoren und Schalter - Teil 1 Elena Süs 11.12.2012 Literatur: J.D. Murray: Mathematical Biology: I. An Introduction, Third Edition, Springer Gliederung 1 Motivation 2 Historische Entwicklung
Ökologische Gleichungen für zwei Spezies
 Ökologische Gleichungen für zwei Spezies Florian Kern 06.Dezember 2011 Josef Hofbauer and Karl Sigmund: Evolutionary Games and Population Dynamics, Cambridge, Kapitel 4 Inhaltsverzeichnis 1 Satz von der
Ökologische Gleichungen für zwei Spezies Florian Kern 06.Dezember 2011 Josef Hofbauer and Karl Sigmund: Evolutionary Games and Population Dynamics, Cambridge, Kapitel 4 Inhaltsverzeichnis 1 Satz von der
7. Übungsblatt Physik I für MWWT Komplexe Zahlen, gewöhnliche Differentialgleichungen
 Prof. Dr. Walter Arnold Lehrstuhl für Materialsimulation Universität des Saarlandes 5. Januar 2016 7. Übungsblatt Physik I für MWWT Komplexe Zahlen, gewöhnliche Differentialgleichungen Abgabe des Übungsblattes
Prof. Dr. Walter Arnold Lehrstuhl für Materialsimulation Universität des Saarlandes 5. Januar 2016 7. Übungsblatt Physik I für MWWT Komplexe Zahlen, gewöhnliche Differentialgleichungen Abgabe des Übungsblattes
5 Interpolation und Approximation
 5 Interpolation und Approximation Problemstellung: Es soll eine Funktion f(x) approximiert werden, von der die Funktionswerte nur an diskreten Stellen bekannt sind. 5. Das Interpolationspolynom y y = P(x)
5 Interpolation und Approximation Problemstellung: Es soll eine Funktion f(x) approximiert werden, von der die Funktionswerte nur an diskreten Stellen bekannt sind. 5. Das Interpolationspolynom y y = P(x)
Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder
 DGL Schwingung Physikalische Felder Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder Johannes Wiedersich 23. April 2008 http://www.e13.physik.tu-muenchen.de/wiedersich/
DGL Schwingung Physikalische Felder Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder Johannes Wiedersich 23. April 2008 http://www.e13.physik.tu-muenchen.de/wiedersich/
Exakte Differentialgleichungen
 Kapitel 4 Exakte Differentialgleichungen 4.1 Kurvenscharen Sei D R 2 ein offenes und zusammenhängendes Gebiet. Dann kann man zu jeder D einfach überdeckenden Kurvenschar eine Differentialgleichung erster
Kapitel 4 Exakte Differentialgleichungen 4.1 Kurvenscharen Sei D R 2 ein offenes und zusammenhängendes Gebiet. Dann kann man zu jeder D einfach überdeckenden Kurvenschar eine Differentialgleichung erster
Lösungen zum 9. Übungsblatt zur Vorlesung Höhere Mathematik II für biw/ciw/mach/mage/vt
 Karlsruher Institut für Technologie Institut für Algebra und Geometrie PD Dr. F. Hettlich Dr. S. Schmitt Dipl.-Math. J. Kusch Karlsruhe, den 09.06.20 Lösungen zum 9. Übungsblatt zur Vorlesung Höhere Mathematik
Karlsruher Institut für Technologie Institut für Algebra und Geometrie PD Dr. F. Hettlich Dr. S. Schmitt Dipl.-Math. J. Kusch Karlsruhe, den 09.06.20 Lösungen zum 9. Übungsblatt zur Vorlesung Höhere Mathematik
Kleine Formelsammlung zu Mathematik für Ingenieure IIA
 Kleine Formelsammlung zu Mathematik für Ingenieure IIA Florian Franzmann 5. Oktober 004 Inhaltsverzeichnis Additionstheoreme Reihen und Folgen 3. Reihen...................................... 3. Potenzreihen..................................
Kleine Formelsammlung zu Mathematik für Ingenieure IIA Florian Franzmann 5. Oktober 004 Inhaltsverzeichnis Additionstheoreme Reihen und Folgen 3. Reihen...................................... 3. Potenzreihen..................................
Deterministisches Chaos
 Deterministisches Chaos Um 1900 Henri Poincaré: Bewegung von zwei Planeten um die Sonne kann zu sehr komplizierten Bahnen führen. (chaotische Bahnen) Seit ca. 1970 Entwicklung der Chaostheorie basierend
Deterministisches Chaos Um 1900 Henri Poincaré: Bewegung von zwei Planeten um die Sonne kann zu sehr komplizierten Bahnen führen. (chaotische Bahnen) Seit ca. 1970 Entwicklung der Chaostheorie basierend
6. Erzwungene Schwingungen
 6. Erzwungene Schwingungen Ein durch zeitveränderliche äußere Einwirkung zum Schwingen angeregtes (gezwungenes) System führt erzwungene Schwingungen durch. Bedeutsam sind vor allem periodische Erregungen
6. Erzwungene Schwingungen Ein durch zeitveränderliche äußere Einwirkung zum Schwingen angeregtes (gezwungenes) System führt erzwungene Schwingungen durch. Bedeutsam sind vor allem periodische Erregungen
Lineare Systeme 1. Ordnung
 KAPITEL 7 Lineare Systeme. Ordnung 7. Allgemeine Aussagen über lineare Systeme. Ordnung...... 235 7.2 Homogene lineare Systeme. Ordnung mit konstanten Koeffizienten237 7.3 Inhomogenes System. Ordnung mit
KAPITEL 7 Lineare Systeme. Ordnung 7. Allgemeine Aussagen über lineare Systeme. Ordnung...... 235 7.2 Homogene lineare Systeme. Ordnung mit konstanten Koeffizienten237 7.3 Inhomogenes System. Ordnung mit
18.4 Das Newton-Verfahren
 18.4 Das Newton-Verfahren Ziel: Wir suchen die Nullstellen einer Funktion f : D R n, D R n : f(x) = 0 Wir kennen bereits die Fixpunktiteration x k+1 := Φ(x k ) mit Startwert x 0 und Iterationsvorschrift
18.4 Das Newton-Verfahren Ziel: Wir suchen die Nullstellen einer Funktion f : D R n, D R n : f(x) = 0 Wir kennen bereits die Fixpunktiteration x k+1 := Φ(x k ) mit Startwert x 0 und Iterationsvorschrift
Theoretische Mechanik
 Prof. Dr. R. Ketzmerick/Dr. R. Schumann Technische Universität Dresden Institut für Theoretische Physik Sommersemester 008 Theoretische Mechanik 4. Übung Lösungen 4. Spezielle Kraftgesetze Lösen Sie die
Prof. Dr. R. Ketzmerick/Dr. R. Schumann Technische Universität Dresden Institut für Theoretische Physik Sommersemester 008 Theoretische Mechanik 4. Übung Lösungen 4. Spezielle Kraftgesetze Lösen Sie die
Apl. Prof. Dr. N. Knarr Höhere Mathematik III Musterlösung , 120min
 Aufgabe 1 8 Punkte Es seien eine Kurve K R mit Parametrisierung C : [ π, π] R und ein Vektorfeld g : R R gegeben durch cos t 4y Ct :, gx, y : sin t 1 05 K 05 05 1 15 05 a 3 Punkte Berechnen Sie die Zirkulation
Aufgabe 1 8 Punkte Es seien eine Kurve K R mit Parametrisierung C : [ π, π] R und ein Vektorfeld g : R R gegeben durch cos t 4y Ct :, gx, y : sin t 1 05 K 05 05 1 15 05 a 3 Punkte Berechnen Sie die Zirkulation
Übungen zur Theoretischen Physik 1 Lösungen zum Mathe-Test
 Prof. C. Greiner, Dr. H. van Hees Wintersemester 2012/2013 Übungen zur Theoretischen Physik 1 Lösungen zum Mathe-Test Aufgabe 1: Bruchrechnung Lösen Sie die folgenden Gleichungen nach x auf (a) x x 2 1
Prof. C. Greiner, Dr. H. van Hees Wintersemester 2012/2013 Übungen zur Theoretischen Physik 1 Lösungen zum Mathe-Test Aufgabe 1: Bruchrechnung Lösen Sie die folgenden Gleichungen nach x auf (a) x x 2 1
Bestimmen Sie die Lösung des Anfangswertproblems. y (x) 4y (x) 5y(x) = 6e x. y(0) = y (0) = 0.
 4y (x) 5y(x) = 6e x. y(0) = y (0) = 0.") Aufgabe Bestimmen Sie die Lösung des Anfangswertproblems y (x) 4y (x) 5y(x) = 6e x y(0) = y (0) = 0. Zunächst bestimmen wir die Lösung der homogenen DGL. Das charakteristische Polynom der DGL ist λ 2 4λ
Aufgabe Bestimmen Sie die Lösung des Anfangswertproblems y (x) 4y (x) 5y(x) = 6e x y(0) = y (0) = 0. Zunächst bestimmen wir die Lösung der homogenen DGL. Das charakteristische Polynom der DGL ist λ 2 4λ
Das mathematische Pendel
 1 Das mathematische Pendel A. Krumbholz, S. Effendi 25. Juni 2013 2 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung 3 1.1 Das mathematische Pendel........................... 3 1.2
1 Das mathematische Pendel A. Krumbholz, S. Effendi 25. Juni 2013 2 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung 3 1.1 Das mathematische Pendel........................... 3 1.2
2. Freie gedämpfte Schwingungen
 2. Freie gedämpfte Schwingungen Bei realen Systemen werden die Schwingungsausschläge mit der Zeit kleiner, und die Schwingung kommt zum Stillstand. Ursache sind Energieverluste durch Reibungs- und Dämpfungskräfte:
2. Freie gedämpfte Schwingungen Bei realen Systemen werden die Schwingungsausschläge mit der Zeit kleiner, und die Schwingung kommt zum Stillstand. Ursache sind Energieverluste durch Reibungs- und Dämpfungskräfte: