Kap. 4.2: Simplex- Algorithmus
|
|
|
- Meta Weiner
- vor 7 Jahren
- Abrufe
Transkript
1 Kap. 4.2: Simplex- Algorithmus Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund VO A&D WS 08/ Petra Mutzel Alg. & Dat. WS 08/09 1
2 Literatur für diese VO V. Chvatal: Linear Programming D. Bertsimas: Linear Programming Petra Mutzel Alg. & Dat. WS 08/09 2
3 Überblick 4.2 Der Simplex-Algorithmus Einführung Basisaustauschsatz Tableau-Methode (Standard-Simplex) Revidierte Simplex-Methode mit Eta- Faktorisierung Spalten- und Zeilenauswahlregeln Terminierung Analyse der Laufzeit Petra Mutzel Alg. & Dat. WS 08/09 3
4 3.2 Der Simplex-Algorithmus Lineare Programme werden in der Praxis mit Hilfe des Simplex-Algorithmus gelöst [Dantzig 1955]. Max 3x 1 + 2x 2 + 2x 3 Subject to x 1 + x 3 8 x 1 + x 2 7 x 1 + 2x 2 12 x 1, x 2, x 3 0 Petra Mutzel Alg. & Dat. WS 08/09 4
5 Visualisierung des Simplex-Algorithmus Max z = 3x 1 + 2x 2 + 2x 3 x 3 (0,0,8) (0,6,8) Optimal! (2,5,6) z = 28 z = 0 (0,6,0) x 2 (7,0,1) z = 23 (2,5,0) x 1 (7,0,0) z = 21
6 Simplex-Algorithmus Gegeben: LP mit Lösungspolyeder P (1) Bestimme einen beliebige Ecke (Initialecke) v von P. (2) Falls es keine verbessernde Kante inzident zu v gibt stop: v ist optimal. (3) Folge einer beliebigen verbessernden Kante e von v. Falls e unbeschränkt ist, d.h. keinen anderen Endpunkt hat stop: Das LP ist unbeschränkt. (4) Sei u der andere Endpunkt von e. Setze v=u. Gehe zu (2)
7 Offene Fragen zu Simplex-Algorithmus Wie findet man eine Initialecke v von P? Bei zulässigen LPs in Standardform mit nicht-negativen a ij und b i ist der Ursprung (Punkt 0) immer ein Knoten von P. Ansonsten verwendet man ein Preprocessing (Phase 1), das an einem Schnittpunkt evtl. außerhalb von P startet und durch ähnliche Basisaustauschschritte zu einer Ecke in P läuft. Wie wird das Polyeder abgespeichert? Man speichert das durch die Restriktionen beschriebene Gleichungssystem in Form eines Tableaus ab. In jedem Simplexschritt verändert sich das Tableau und die ausgehenden Kanten des aktuellen Ecke können aus dem Tableau berechnet werden. Teste, ob die aktuelle Ecke optimal ist? Falls nicht, welche verbessernde Kante wählt man? Terminiert der Algorithmus? s. Vorlesung: gleich
8 Definitionen Gegeben sei ein Gleichungssystem Ax=b mit A R m n, m<n, b R m, rang(a)=m. Sei B=(p 1,p 2,...,p m ) {1,2,...,n} m Spaltenindexmenge und N=(q 1,q 2,...,q n-m ) {1,2,...,n} n-m Spaltenindexmengen mit B N={1,2,...,n} und B N=. Für J {1,2,...n}: A J ist die Untermatrix von A nach Streichen der Spalten aus {1,2,...,n} \ J. Wir schreiben A B statt A B und A N statt A N. Ist A B regulär (=invertierbar), so heißt A B Basismatrix oder Basis von A und B Basisindexvektor oder Basis von A; analog A N, N Nichtbasisindexvektor. Der Vektor x R n mit x N =0, x B =A B -1 b heißt Basislösung von Ax=b zur Basis A B.
9 Definitionen Ist A B regulär (=invertierbar), so heißt A B Basismatrix oder Basis von A und B Basisindexvektor oder Basis von A; analog A N, N Nichtbasisindexvektor. Der Vektor x R n mit x N =0, x B =A B -1 b heißt Basislösung von Ax=b zur Basis A B. Ist A B eine Basis, so heißen die Variablen x j, j B, Basisvariablen und die x j, j N Nichtbasisvariablen. Ist A B Basis und gilt A B -1 b 0, so heißen A B, B und die zugehörige Basislösung x zulässig, sonst unzulässig. Eine zulässige Basislösung x zur Basis A B heißt nichtdegeneriert, falls (x B ) i =(A B -1 b) i >0 für alle i B, sonst degeneriert.
10 Simplex-Gleichungsschema und Simplex Tableau max c T x s.t. Ax=b, x 0 max c B c N T x B x N s.t. (A B, A N ) x B = b, x B 0 x N x N A B x B + A N x N = b x B = A B 1 b A B 1 A N x N Zielfunktionswert: z = c B T x B + c N T x N = c B T (A B 1 b A B 1 A N x N ) + c N T x N = = c T B A 1 B b + (c T N c T B A 1 B A N )x N Simplex-Gleichungsschema: x B = A 1 B b A 1 B A N x N z = c T B A 1 B b + (c T N c T B A 1 B A N )x N
11 Simplex-Gleichungsschema und Simplex Tableau Simplex-Gl.schema: x B = A B 1 b A B 1 A N x N z = c B T A B 1 b + (c N T c B T A B 1 A N )x N Zielfunktionswert Simplex-Tableau: Werte der Basisvariablen - c B T A B 1 b A B 1 b c N T c B T A B 1 A N A B 1 A N reduzierte Kosten

12 Basisaustauschsatz Beispiel, s. Tafel

13 Beweis: (a) (b1) Petra Mutzel Alg. & Dat. WS 08/09 14
14 (b2) A B entsteht aus A B durch Ersetzen der r-ten Spalte durch A qs. Es gilt A B = A B F, wobei F = ā 1s ā r 1,s ā rs ā r+1,s ā ms Denn: Wir haben Ā s = A 1 B A q s und deshalb ist die s-te Spalte von A B F gleich A B Ā s = A B A 1 B A s = A qs und alle anderen Spalten bleiben wie in A B. Es gilt ā rs > 0, also ist F regulär und somit ist A B eine Basis. Petra Mutzel Alg. & Dat. WS 08/09 15
15 Weiterhin ist x B = A 1 b = F 1 A 1 B B b = F 1 x B = F 1 b mit ā1s ā rs ār 1,s F 1 ā rs 1 = ā rs ār+1,s ā rs āms ā rs Also gilt für i 1, 2,..., m: r-te Spalte Falls ā is > 0: x p i = b i āis ā rs br b i āis ā bi is =0 insbesondere für i = r: x p r = b r ārs ā rs br = 0 (neue Nichtbasisvariable) Falls ā is 0: x p i = b i āis ā rs br b i 0 und x q s = b r ā rs 0 (neue Basisvariable) Also ist x zulässige Basislösung zur Basis B. Petra Mutzel Alg. & Dat. WS 08/09 16

16 (b3) nicht-degenerierter Fall: λ 0 >0: Petra Mutzel Alg. & Dat. WS 08/09 17
17 Simplex-Algorithmus (1) Start mit einer zulässigen Basis (2) Iterierte Anwendung des Satzes: (a) STOP, Optimalität (b1) STOP, Unbeschränktheit (b2) Basiswechsel: Pivot mit Pivotspalte s und Pivotzeile r 2 Varianten: Tableau-Methode (Standard-Simplex) Revidierte Methode
18 Tableau-Methode Zielfunktionswert - c B T A B 1 b c N T c B T A B 1 A N reduzierte Kosten Werte der Basisvariablen A B 1 b A B 1 A N t 00 t t 0n t 10 t t 1n t m0 t m1... t mn Das Tableau ist zulässig falls t i0 0 für alle i {1,2,...,m}. Das Tableau ist optimal falls t 0j 0 für alle j {1,2,...,n}.
19 Rechenregeln (aus Basisaustausch-Satz) Berechnung von Ā = A 1 B A N : A 1 B A N =(A B F ) 1 A N = F 1 (A 1 B A N ) A N unterscheidet sich von A N nur durch die r-te Spalte (gehört zur Variablen mit Index p r ). Zur Neuberechnung von Ā muss Ā also im Wesentlichen mit F 1 multipliziert werden; Ausnahmen bilden die r-te Spalte sowie die s-te Zeile. Dasselbe gilt für die Berechnung von b und c. Das Element ā rs wird als Pivotelement bezeichnet. Daraus ergeben sich die folgenden Rechenregeln: Petra Mutzel Alg. & Dat. WS 08/09 20
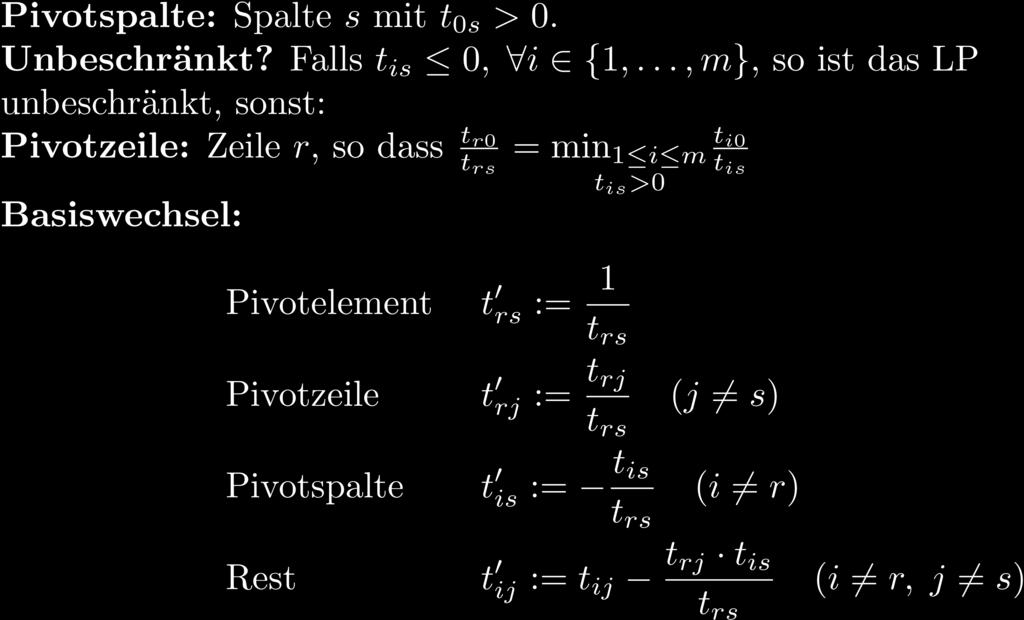
20 Rechenregeln (aus Basisaustausch-Satz)
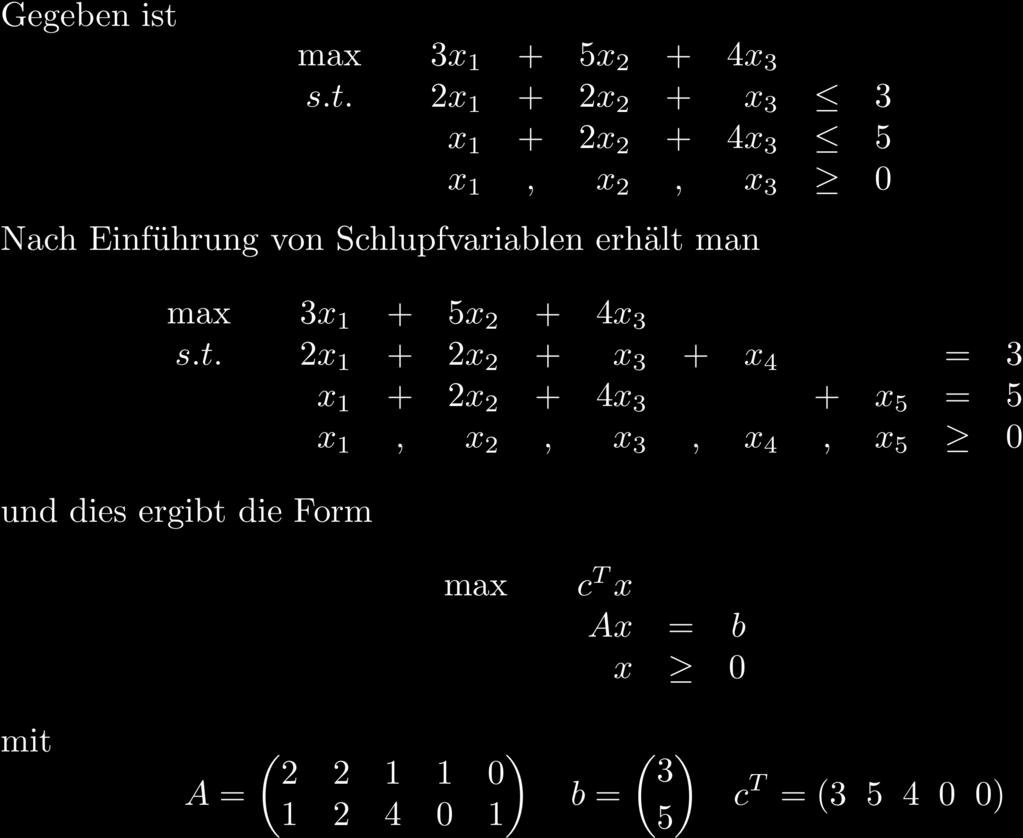
21 Beispiel

22 Beispiel ff

23 Beispiel fff
24 Beobachtungen zum Simplex-Algorithmus In jeder Iteration wird eine Basislösung durch eine andere ersetzt. Zur Berechnung der neuen Basislösung x B wird nur ein sehr kleiner Teil des Tableaus benutzt: man benötigt A -1 B, b=x B und c sowie die s-te Spalte von A. Idee: Statt jedes Mal die ganze Matrix zu berechnen, berechne nur den Teil, der wirklich gebraucht wird, und dies direkt aus den Originaldaten revidierte Simplexmethode

25 Revidierte Simplex-Methode Petra Mutzel Alg. & Dat. WS 08/09 26

26 Petra Mutzel Alg. & Dat. WS 08/09 27
27 Beispiel Gleiches Beispiel wie vorhin mit B = (4, 5),N = (1, 2, 3), c = (3, 5, 4, 0, 0), ( ) ( ) ( ) ( ) 1 0 x A B =, x 0 1 B = =, A = x 5 1. Iteration: y T A B = c T B : y T ( ) = (0 0) y = ( ) 0 0 F r x 2 sind die reduzierten Kosten c 2 y T ( ) 2 2 = c 2 =5. x 2 tritt ein t = 3 2 und x 4 raus. A B d = a d = ( ) 2 2
28 Beispiel Damit haben wir die neue Basis sowie Basislösung: x 2 = 3 2 x B := ( x4 x 5 B = (2, 5) ) N = (1, 4, 3) ( 3 ) x B := 2 2 = Es gilt: A B = A Balt F = ( ) ( ) 2 2 = ( ) 0 2 ( )( ) = ( ) Petra Mutzel Alg. & Dat. WS 08/09 29
29 2. Iteration Beispiel ( ) y T = (5, 0) y = ( ) Reduzierte Kosten: x 1 :3 ( 5 ( ) 2 2, 0) 1 x 4 :0 ( 5 ( ) 1 2, 0) 0 x 3 :4 ( 5 ( ) 1 2, 0) 4 = 2 0 = = 3 2 x 3 rein Petra Mutzel Alg. & Dat. WS 08/09 30
30 t = 2 3 und x 5 raus. A B d = a : Beispiel ( ) 2 0 d = 2 1 ( ) 1 4 d = ( ) x 3 = 2 3 x B := ( x2 x 5 ) = ( ) 2 3( ) = ( B = (2, 3),N = (1, 4, 5) ( 7 ) 6 x B := 2 3 ( )( ) Es gilt: A B = A Balt F = ) = ( ) Petra Mutzel Alg. & Dat. WS 08/09 31
31 Beispiel 3. Iteration: Reduzierte Kosten: ( ) y T = (5 4) y = ( ( x 1 :3 2, 1 )( ) 2 = ( x 4 :0 2, 1 )( ) 1 = ( x 5 :0 2, 1 )( ) 0 = ) Optimal!

32 Lösung der Gleichungssysteme durch Eta-Faktorisierung der Basis Ziel: Lösung nicht mittels Neuberechnung der Inversen B r-te Spalte wird ersetzt durch d Petra Mutzel Alg. & Dat. WS 08/09 33
)) = a E 1 u = a, E 2 v = u, E 3 w = v, E 4 d = w.")
33 Eta-Faktorisierung der Basis Z.B. Lösen von y T A B4 = c T B : (((yt E 1 )E 2 )E 3 )E 4 = c T B : u T E 4 = c T B,vT E 3 = u T,w T E 2 = v T,y T E 1 = w T. Lösen von A B4 d = a: E 1 (E 2 (E 3 (E 4 d))) = a E 1 u = a, E 2 v = u, E 3 w = v, E 4 d = w. BTRAN für back transformation FTRAN für forward transformation Speicherung der Eta-Matrizen: jeweils nur die Spalte und die Position. Eta-File: E 1,E 2,..., E k.
34 Bemerkung zur Eta-Faktorisierung Mit der Eta-Faktorisierung hat man zwar mehr Gleichungssysteme zu lösen, da diese aber sehr dünn besetzt ist, ist dies mit sehr geringem Aufwand verbunden: Wenn die Eta-Spalte k Nicht-Nullen besitzt, dann werden hierzu nur k-1 Multiplikationen, k-1 Additionen und 1 Division benötigt. Denn das Lösen von E k d = a ist einfach: Sei die r-te Spalte von E k gegeben durch ā: Dann ist d r = a rs /ā rs und d i = a 1s ā is d r
35 Faktorisierung / Refaktorisierung Problem 1: In jeder Iteration kommt eine neue Eta-Matrix hinzu Zunehmende Ineffizienz, da immer mehr Gleichungssysteme zu lösen sind und damit auch neben dem Zeitfaktor numerische Fehler verbunden sind Lösung: Neuberechnung von A B k alle h Iterationen (Chvatal empfiehlt h=20) (z.b. als LU-Zerlegung oder trianguläre Faktorisierung) und setze diese als neues A B 0. Problem 2: Was tun, wenn A B 0 I? Periodische Refaktorisierung Faktorisierung Lösung: Faktorisierung von A B 0 (z.b. als LU-Zerlegung oder trianguläre Faktorisierung)
36 Vorteile der revidierten Methode Rechenaufwand ist bei einer großen und dünn besetzten Matrix deutlich kleiner als bei Tableau- Methode Spalten werden nur bei Bedarf generiert Eta-Faktorisierung (und Refaktorisierung) statt Speicherung der inversen Matrix Rechengenauigkeit ist deutlich besser, denn man kann die inverse Basismatrix regelmäßig neu berechnen. Simplexalgorithmus läßt noch einige Freiheiten, z.b. bei Zeilen und Spaltenauswahl, denn es können jeweils mehrere Kandidaten existieren.
37 Spaltenauswahlregeln Kleinster-Index-Regel: Wähle die Spalte mit kleinstem Index Kleinster-Variablenindex-Regel: Wähle die Spalte mit dem kleinsten Variablenindex Steilster-Anstieg-Regel: Wähle diejenige Spalt mit den größten reduzierten Kosten Größter-Fortschritt-Regel: Berechne den neuen Zielfunktionswert über alle möglichen Spalten aus und wähle dann diejenige Spalte, die den größten Wert bringt. Lexikographische Spaltenauswahlregel: Betrachte jeweils die Vektoren der in Frage kommenden Spalten und wähle den lexikographisch kleinsten aus. Petra Mutzel Alg. & Dat. WS 08/09 38
38 Zeilenauswahlregeln Diese Regeln werden dann angewendet, falls es mehrere Kandidaten zur Auswahl gibt Kleinster-Index-Regel: Wähle die Zeile mit kleinstem Index Kleinster-Variablenindex-Regel: Wähle die Zeile mit dem kleinsten Variablenindex Lexikographische Zeilenauswahlregel: Betrachte jeweils die Vektoren der in Frage kommenden Zeilen und wähle den lexikographisch kleinsten aus. Petra Mutzel Alg. & Dat. WS 08/09 39
39 Terminierung Problem: Man kann Beispiele konstruieren, für die sich eine Basis wiederholt: Phänomen des Zykelns (nur bei Degenerität) keine Terminierung Lösung: Es gibt Spalten- bzw. Zeilenauswahlregeln, von denen man zeigen kann, dass in diesem Fall der Simplex-Algorithmus terminiert. Petra Mutzel Alg. & Dat. WS 08/09 40
40 Terminierung Bland s Regel: Eintretende und austretende Variable ist immer diejenige mit dem kleinsten Index. Satz (Bland, 1977): Bei der Anwendung von Bland s Regel terminiert der Simplexalgorithmus. Bemerkungen: Wendet man die kleinste Indexregel auf nur eine Spalten- oder Zeilenauswahl an, dann kann man Beispiele konstruieren, bei denen das Verfahren nicht terminiert. Es gibt aber auch Regeln (z.b. die lexikographische Zeilen- bzw. Spaltenauswahlregel), die nur auf eines der beiden angewendet werden müssen um Terminierung zu erhalten.
41 Bemerkungen Achtung: Bland s Regel verhindert zwar das Zykeln, aber in der Praxis hat sich gezeigt, dass i.a. die Anzahl der Pivotoperationen bei Anwendung der Bland-Regel wesentlich höher liegt als z.b. bei der Steilster Anstieg-Regel. In der Praxis wird daher meist die steilste Anstieg Regel zur Spaltenauswahl verwendet.
42 Laufzeit Worst Case: Zu fast allen bekannten Pivotauswahlregeln kennt man heute eine Klasse von Polyedern und Zielfunktionen, so dass der Simplexalgorithmus bei Anwendung einer zugehörigen Auswahlregel durch alle Ecken des Polyeders läuft. Da die Anzahl der Ecken dieser Polyeder exponentiell mit der Anzahl der Variablen wächst exponentielle worst-case Laufzeit.
43 Laufzeitvergleich von Tableau- mit Revidierter Simplexmethode Laufzeit pro Iteration für dünn-besetzte Matrizen: Schätzung laut Chvatal-Buch: Annahme: Tableauspalten und Zeilen enthalten m/2 bzw. n/2 Nicht-NullElemente; Faktorisierungsmatrizen von B k : 12m Nicht-Null-Elemente; Eta-Spalten: ca. 25%-50% dicht FTRAN: ca. 10m, BTRAN: ca. 20m Auswahl der Eingangsvariablen: 10n Berechnung der Ausgangsvariablen: m Aktualisierung von x B und B: m Gesamtzeit Revidierter Simplex: 32m+10n Gesamtzeit Tableau-Methode: mn/4
Kap. 4.2: Simplex- Algorithmus
 Kap. 4.: Simplex- Algorithmus Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS Fakultät für Informatik, TU Dortmund Literatur für diese VO V. Chvatal: Linear Programming D. ertsimas:
Kap. 4.: Simplex- Algorithmus Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS Fakultät für Informatik, TU Dortmund Literatur für diese VO V. Chvatal: Linear Programming D. ertsimas:
Kap. 4: Lineare Programmierung
 Kap. 4: Lineare Programmierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 13./14. VO A&D WS 08/09 27.11./2.12.2008 Petra Mutzel Alg. & Dat.
Kap. 4: Lineare Programmierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 13./14. VO A&D WS 08/09 27.11./2.12.2008 Petra Mutzel Alg. & Dat.
VORLESUNG 12 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt)
") VORLESUNG 12 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 53 Wiederholung! Basis-Startlösung berechnet! Künstliche Variablen! Erkennung von unlösbaren Problemen! Eliminierung
VORLESUNG 12 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 53 Wiederholung! Basis-Startlösung berechnet! Künstliche Variablen! Erkennung von unlösbaren Problemen! Eliminierung
Minimumproblem. Definition 4.7. Ein LP der Form. unter den Nebenbedingungen. d ij x j b i (i =1,...,m)
") Minimumproblem Definition 4.7 Ein LP der Form nx Minimiere Z = c j x j j=1 unter den Nebenbedingungen nx d ij x j b i (i =1,...,m) j=1 und den Vorzeichenbedingungen x j 0(j =1,...,n) heißt Minimumproblem.
Minimumproblem Definition 4.7 Ein LP der Form nx Minimiere Z = c j x j j=1 unter den Nebenbedingungen nx d ij x j b i (i =1,...,m) j=1 und den Vorzeichenbedingungen x j 0(j =1,...,n) heißt Minimumproblem.
Optimierung. Optimierung. Vorlesung 8 Lineare Programmierung III: Simplex Algorithmus Fabian Kuhn
 Optimierung Vorlesung 8 Lineare Programmierung III: Simplex Algorithmus 1 Resource Allocation Beispiel aus Vorlesung 6 Primales LP: Duales LP: max 3 4 2 2 4 2 8 3 6 0, 0, 0 min 4 8 6 2 3 3 4 2 2 0, 0,
Optimierung Vorlesung 8 Lineare Programmierung III: Simplex Algorithmus 1 Resource Allocation Beispiel aus Vorlesung 6 Primales LP: Duales LP: max 3 4 2 2 4 2 8 3 6 0, 0, 0 min 4 8 6 2 3 3 4 2 2 0, 0,
VORLESUNG 11 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt)
") VORLESUNG Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 3 Wiederholung! Lineare Programme häufig geeignete Modellierung von Optimierungsproblemen! Verschiedene Darstellungen sind
VORLESUNG Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 3 Wiederholung! Lineare Programme häufig geeignete Modellierung von Optimierungsproblemen! Verschiedene Darstellungen sind
Kap. 4.3: Das Dualitätstheorem der linearen Optimierung
 Kap. 4.3: Das Dualitätstheorem der linearen Optimierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 18. VO A&D WS 08/09 18.12.2008 1 Literatur
Kap. 4.3: Das Dualitätstheorem der linearen Optimierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 18. VO A&D WS 08/09 18.12.2008 1 Literatur
Eigenschaften von LPs
 2 Lineare Programmierung Eigenschaften von LPs Eigenschaften von LPs Definition 24 Eine Menge K IR n heißt konvex gdw für je zwei Punkte Punkte x (1) K und x (2) K auch jeder Punkt mit 0 λ 1 zu K gehört
2 Lineare Programmierung Eigenschaften von LPs Eigenschaften von LPs Definition 24 Eine Menge K IR n heißt konvex gdw für je zwei Punkte Punkte x (1) K und x (2) K auch jeder Punkt mit 0 λ 1 zu K gehört
Optimierung. Vorlesung 02
 Optimierung Vorlesung 02 LPs in kanonischer Form Für i = 1,, m und j = 1,, d seien c j, b i und a ij reele Zahlen. Gesucht wird eine Belegung der Variablen x 1,, x d, so das die Zielfunktion d c j x j
Optimierung Vorlesung 02 LPs in kanonischer Form Für i = 1,, m und j = 1,, d seien c j, b i und a ij reele Zahlen. Gesucht wird eine Belegung der Variablen x 1,, x d, so das die Zielfunktion d c j x j
4.3.3 Simplexiteration
 7. Januar 2013 53 4.3.3 Simplexiteration Eine Simplexiteration entspricht dem Übergang von einer Ecke des zulässigen Bereiches in eine benachbarte Ecke Dabei wird genau eine Nichtbasisvariable (die zugehörige
7. Januar 2013 53 4.3.3 Simplexiteration Eine Simplexiteration entspricht dem Übergang von einer Ecke des zulässigen Bereiches in eine benachbarte Ecke Dabei wird genau eine Nichtbasisvariable (die zugehörige
Lineare Optimierung: Simplexverfahren Phase Ⅰ
 Lineare Optimierung: Simplexverfahren Phase Ⅰ Zur Erinnerung: Die Lineare Optimierungsaufgabe in Standardform lautet z = c T x + c 0 min (.) bei Ax = b, x 0. Revidiertes Simplexverfahren Mit dem Simplexverfahren
Lineare Optimierung: Simplexverfahren Phase Ⅰ Zur Erinnerung: Die Lineare Optimierungsaufgabe in Standardform lautet z = c T x + c 0 min (.) bei Ax = b, x 0. Revidiertes Simplexverfahren Mit dem Simplexverfahren
Simplex-Verfahren. Kapitel 4. Simplex-Verfahren. Peter Becker (H-BRS) Operations Research I Sommersemester / 298
 Operations Research I Sommersemester / 298") Kapitel 4 Simplex-Verfahren Peter Becker (H-BRS) Operations Research I Sommersemester 24 86 / 298 Inhalt Inhalt 4 Simplex-Verfahren Dualer Simplexalgorithmus Vermeidung von Zyklen Peter Becker (H-BRS)
Kapitel 4 Simplex-Verfahren Peter Becker (H-BRS) Operations Research I Sommersemester 24 86 / 298 Inhalt Inhalt 4 Simplex-Verfahren Dualer Simplexalgorithmus Vermeidung von Zyklen Peter Becker (H-BRS)
4 Lineare Optimierung
 4 Lineare Optimierung In diesem Kapitel werden wir uns mit effizienten Verfahren im Bereich der linearen Optimierung beschäftigen. 4.1 Einführung Als Einführung betrachten wir das Beispiel einer Erdölraffinerie.
4 Lineare Optimierung In diesem Kapitel werden wir uns mit effizienten Verfahren im Bereich der linearen Optimierung beschäftigen. 4.1 Einführung Als Einführung betrachten wir das Beispiel einer Erdölraffinerie.
Algorithmik WS 07/ Vorlesung, Andreas Jakoby Universität zu Lübeck
 Lemma 15 KLP 1 ist genau dann lösbar, wenn das dazugehörige LP KLP 2 eine Lösung mit dem Wert Z = 0 besitzt. Ist Z = 0 für x 0, x 0, dann ist x eine zulässige Lösung von KLP 1. Beweis von Lemma 15: Nach
Lemma 15 KLP 1 ist genau dann lösbar, wenn das dazugehörige LP KLP 2 eine Lösung mit dem Wert Z = 0 besitzt. Ist Z = 0 für x 0, x 0, dann ist x eine zulässige Lösung von KLP 1. Beweis von Lemma 15: Nach
Operations Research. Die Simplexmethode. LP-Dualität. Die Simplexmethode. Rainer Schrader. 18. Juni Zur Erinnerung: Gliederung
 Operations Research Rainer Schrader Die Simplexmethode Zentrum für Angewandte Informatik Köln 18 Juni 00 1 / 1 / 1 Gliederung LP-Dualität ein lineares Produktionsmodell der Simplexalgorithmus Phase I Endlichkeit
Operations Research Rainer Schrader Die Simplexmethode Zentrum für Angewandte Informatik Köln 18 Juni 00 1 / 1 / 1 Gliederung LP-Dualität ein lineares Produktionsmodell der Simplexalgorithmus Phase I Endlichkeit
Optimierung. Vorlesung 04
 Optimierung Vorlesung 04 Übungsbetrieb Mangels Teilnehmer keine Dienstagsübung mehr. Prüfung laut Paul: Di, 10. Feb. 2015 00:01-23:59 2 Was bisher geschah LP: Maximiere c T x unter Ax = b, x 0. Basis:
Optimierung Vorlesung 04 Übungsbetrieb Mangels Teilnehmer keine Dienstagsübung mehr. Prüfung laut Paul: Di, 10. Feb. 2015 00:01-23:59 2 Was bisher geschah LP: Maximiere c T x unter Ax = b, x 0. Basis:
Kombinatorische Optimierung
 Kombinatorische Optimierung Juniorprof. Dr. Henning Meyerhenke PARALLELES RECHNEN INSTITUT FÜR THEORETISCHE INFORMATIK, FAKULTÄT FÜR INFORMATIK KIT Universität des Landes Baden-Württemberg und nationales
Kombinatorische Optimierung Juniorprof. Dr. Henning Meyerhenke PARALLELES RECHNEN INSTITUT FÜR THEORETISCHE INFORMATIK, FAKULTÄT FÜR INFORMATIK KIT Universität des Landes Baden-Württemberg und nationales
Vorlesung Wirtschaftsmathematik I WS 2007/2008, Wirtschaftingenieurwesen. Kapitel IV: Grundlagen der Linearen Optimierung
 Vorlesung Wirtschaftsmathematik I WS 2007/2008, Wirtschaftingenieurwesen Kapitel IV: Grundlagen der Linearen Optimierung Inhaltsverzeichnis Abschnitt 3-5 3 Der Simplexalgorithmus 58 3.1 Grundlagen..............................
Vorlesung Wirtschaftsmathematik I WS 2007/2008, Wirtschaftingenieurwesen Kapitel IV: Grundlagen der Linearen Optimierung Inhaltsverzeichnis Abschnitt 3-5 3 Der Simplexalgorithmus 58 3.1 Grundlagen..............................
Computer Science Department - High Performance and Web Computing Group. Optimierungsprobleme
 Optimierungsprobleme Häufig in Alltagssituationen anzutreffen (z.b. Kauf eines Gerätes) Optimierungsprobleme (OPs) sind Probleme, die i.a. viele zulässige Lösungen besitzen Jeder Lösung ist ein bestimmter
Optimierungsprobleme Häufig in Alltagssituationen anzutreffen (z.b. Kauf eines Gerätes) Optimierungsprobleme (OPs) sind Probleme, die i.a. viele zulässige Lösungen besitzen Jeder Lösung ist ein bestimmter
Der Simplex-Algorithmus
 5 Lineare Programmierung Simplex-Algorithmus Der Simplex-Algorithmus Standardverfahren zur Lösung von LPs, von G B Dantzig entwickelt Grundidee: Versuche ausgehend von einer Startecke mit einer Ausgangsbasis
5 Lineare Programmierung Simplex-Algorithmus Der Simplex-Algorithmus Standardverfahren zur Lösung von LPs, von G B Dantzig entwickelt Grundidee: Versuche ausgehend von einer Startecke mit einer Ausgangsbasis
Zugeordneter bipartiter Graph
 Zugeordneter bipartiter Graph Für ein Transportproblem sei A = {A 1,...,A m } die Menge der Fabriken und B = {B 1,...,B n } sei die Menge der Warenhäuser. Wir ordnen nun einem Transportproblem einen bipartiten
Zugeordneter bipartiter Graph Für ein Transportproblem sei A = {A 1,...,A m } die Menge der Fabriken und B = {B 1,...,B n } sei die Menge der Warenhäuser. Wir ordnen nun einem Transportproblem einen bipartiten
5 Lineare Gleichungssysteme und Determinanten
 5 Lineare Gleichungssysteme und Determinanten 51 Lineare Gleichungssysteme Definition 51 Bei einem linearen Gleichungssystem (LGS) sind n Unbekannte x 1, x 2,, x n so zu bestimmen, dass ein System von
5 Lineare Gleichungssysteme und Determinanten 51 Lineare Gleichungssysteme Definition 51 Bei einem linearen Gleichungssystem (LGS) sind n Unbekannte x 1, x 2,, x n so zu bestimmen, dass ein System von
Wiederholung. Wir gehen von LP s in Standardform aus, wobei A R m n vollen Zeilenrang hat: minc T x A x = b
 Wiederholung Wir gehen von LP s in Standardform aus, wobei A R m n vollen Zeilenrang hat: minc T x A x = b x 0. x R n heißt Basislösung, wenn Ax = b und rang(a J ) = J, wobei J = {j x (j) 0}; Basislösung
Wiederholung Wir gehen von LP s in Standardform aus, wobei A R m n vollen Zeilenrang hat: minc T x A x = b x 0. x R n heißt Basislösung, wenn Ax = b und rang(a J ) = J, wobei J = {j x (j) 0}; Basislösung
Die duale Simplexmethode
 Kapitel 0 Die duale Simplexmethode Bei der dualen Simplexmethode ist eine Startlösung oftmals leichter angebbar als bei der Simplexmethode für das ursprüngliche lineare Programm, da man keine Nichtnegativitätsanforderungen
Kapitel 0 Die duale Simplexmethode Bei der dualen Simplexmethode ist eine Startlösung oftmals leichter angebbar als bei der Simplexmethode für das ursprüngliche lineare Programm, da man keine Nichtnegativitätsanforderungen
Grundlagen der Optimierung. Übung 6
 Technische Universität Chemnitz Chemnitz, 2. November 24 Prof. Dr. R. Herzog, J. Blechschmidt, A. Schäfer Abgabe am 28. November 24 Grundlagen der Optimierung Übung 6 Aufgabe 2: Verschiedene Verfahren
Technische Universität Chemnitz Chemnitz, 2. November 24 Prof. Dr. R. Herzog, J. Blechschmidt, A. Schäfer Abgabe am 28. November 24 Grundlagen der Optimierung Übung 6 Aufgabe 2: Verschiedene Verfahren
Optimale Steuerung 1 Prozessoptimierung 1
 Optimale Steuerung 1 Prozessoptimierung 1 Kapitel 2: Lineare Optimierung Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Lineare Algebra (Mathematische Grundlagen) 2 Beispiel: Produktionsplanung
Optimale Steuerung 1 Prozessoptimierung 1 Kapitel 2: Lineare Optimierung Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Lineare Algebra (Mathematische Grundlagen) 2 Beispiel: Produktionsplanung
Optimierung für Nichtmathematiker
 Optimierung für Nichtmathematiker Prof. Dr. R. Herzog WS2010/11 1 / 1 Teil IV Konvexe und ganzzahlige Optimierung Vorlesung 11 IV Konvexe und ganzzahlige Optimierung 2 / 34 Inhaltsübersicht 29Lineare Optimierung
Optimierung für Nichtmathematiker Prof. Dr. R. Herzog WS2010/11 1 / 1 Teil IV Konvexe und ganzzahlige Optimierung Vorlesung 11 IV Konvexe und ganzzahlige Optimierung 2 / 34 Inhaltsübersicht 29Lineare Optimierung
Optimierung. Vorlesung 08
 Optimierung Vorlesung 08 Heute Dualität Ganzzahligkeit Optimierung der Vorlesung durch Evaluierung 2 Das duale LP Das primale LP Maximiere c T x unter Ax b, x R d 0. wird zu dem dualen LP Minimiere b T
Optimierung Vorlesung 08 Heute Dualität Ganzzahligkeit Optimierung der Vorlesung durch Evaluierung 2 Das duale LP Das primale LP Maximiere c T x unter Ax b, x R d 0. wird zu dem dualen LP Minimiere b T
Aufgabe 5.3 Duale Simplexverfahren
 Aufgabe 5.3 Knut Krause Thomas Siwczyk Stefan Tittel Technische Universität Dortmund Fakultät für Informatik Algorithmen und Datenstrukturen 15. Januar 2009 Gliederung 1 Aufgabenstellung und Motivation
Aufgabe 5.3 Knut Krause Thomas Siwczyk Stefan Tittel Technische Universität Dortmund Fakultät für Informatik Algorithmen und Datenstrukturen 15. Januar 2009 Gliederung 1 Aufgabenstellung und Motivation
10.2 Dualitätstheorie Operations Research. In der Standardform eines Maximierungsproblem: b e ) mit ( w) + a ej ) x j + x g = ( b g + g G
 mit ( w) + a ej ) x j + x g = ( b g + g G") 48 0 Operations Research In der Standardform eines Maximierungsproblem: Max ( w) mit ( w) + u. d. N. z + x l + n ( a gj + j= g G e E n d j x j = z 0 j= n a l j x j = b l für alle l L j= x g n + a gj x
48 0 Operations Research In der Standardform eines Maximierungsproblem: Max ( w) mit ( w) + u. d. N. z + x l + n ( a gj + j= g G e E n d j x j = z 0 j= n a l j x j = b l für alle l L j= x g n + a gj x
Übung 3, Simplex-Algorithmus
 Übung 3, 21.6.2011 Simplex-Algorithmus Aufgabe 3.1 Lösen Sie das folgende Optimierungsproblem (von Aufgabe 2.3) graphisch. Substituieren Sie dazu z = 5 y um ein 2-dimensionales Problem zu erhalten. Rechnung
Übung 3, 21.6.2011 Simplex-Algorithmus Aufgabe 3.1 Lösen Sie das folgende Optimierungsproblem (von Aufgabe 2.3) graphisch. Substituieren Sie dazu z = 5 y um ein 2-dimensionales Problem zu erhalten. Rechnung
Kapitel 7 : Lineare Programmierung Die Simplexmethode (G.B.Dantzig, 1947) Beispiel:
 Beispiel:") Kapitel 7 : Lineare Programmierung Die Simplexmethode (G.B.Dantzig, 1947) Beispiel: Eine Firma produziert die Produkte P 1, P 2,..., P q aus den Rohstoffen R 1, R 2,..., R m. Dabei stehen b j Einheiten
Kapitel 7 : Lineare Programmierung Die Simplexmethode (G.B.Dantzig, 1947) Beispiel: Eine Firma produziert die Produkte P 1, P 2,..., P q aus den Rohstoffen R 1, R 2,..., R m. Dabei stehen b j Einheiten
Schnittebenenverfahren von Gomory. Stefan Allescher 30. Juni 2005
 Schnittebenenverfahren von Gomory Stefan Allescher 30. Juni 2005 Inhaltsverzeichnis 1. Grundprinzip 2. Das Verfahren von Gomory 2.1. Vorgehen 2.2. Beweis der Endlichkeit 2.3. Algorithmische Durchführung
Schnittebenenverfahren von Gomory Stefan Allescher 30. Juni 2005 Inhaltsverzeichnis 1. Grundprinzip 2. Das Verfahren von Gomory 2.1. Vorgehen 2.2. Beweis der Endlichkeit 2.3. Algorithmische Durchführung
z = c T x : Ax = b, x 0 }, - die Darstellung der Nichtbasisvektoren durch die Basis ist
 Kapitel 5 Die Simplexmethode Es werden folgende Bezeichnungen verwendet: - das untersuchte Problem ist min x R n { z = c T x : Ax = b, x 0 }, - die erste zulässige Basislösung sei x = x 1, x 2,, x m, 0,,
Kapitel 5 Die Simplexmethode Es werden folgende Bezeichnungen verwendet: - das untersuchte Problem ist min x R n { z = c T x : Ax = b, x 0 }, - die erste zulässige Basislösung sei x = x 1, x 2,, x m, 0,,
Hauptsatz und Optimalitätskriterium der Simplexmethode
 Kapitel 4 Hauptsatz und Optimalitätskriterium der Simplexmethode In diesem Abschnitt wird das wichtigste Verfahren zur Lösung linearer Optimierungsprobleme eingeführt die Simplexmethode Es existiere für
Kapitel 4 Hauptsatz und Optimalitätskriterium der Simplexmethode In diesem Abschnitt wird das wichtigste Verfahren zur Lösung linearer Optimierungsprobleme eingeführt die Simplexmethode Es existiere für
Einführung in die Lineare Programmierung
 Einführung in die Lineare Programmierung Prof. Dr. Berthold Vöcking Lehrstuhl Informatik 1 RWTH Aachen 28. Mai 2008 Elementares Beispiel Die kanonische Form Die algebraische Gleichungsform Gegeben seien
Einführung in die Lineare Programmierung Prof. Dr. Berthold Vöcking Lehrstuhl Informatik 1 RWTH Aachen 28. Mai 2008 Elementares Beispiel Die kanonische Form Die algebraische Gleichungsform Gegeben seien
Lineare Optimierung Teil 2
 Lineare Optimierung Teil 2 Primale Degeneration Duale Degeneration = Mehrdeutigkeit Normalform kanonische Form Duale Simplexmethode HTW-Berlin FB3 Prof. Dr.F. Hartl 1 Primale Degeneration/1 Besitzt eine
Lineare Optimierung Teil 2 Primale Degeneration Duale Degeneration = Mehrdeutigkeit Normalform kanonische Form Duale Simplexmethode HTW-Berlin FB3 Prof. Dr.F. Hartl 1 Primale Degeneration/1 Besitzt eine
05. Lineare Gleichungssysteme
 05 Lineare Gleichungssysteme Wir betrachten ein System von m Gleichungen in n Unbestimmten (Unbekannten) x 1,, x n von der Form a 11 x 1 + a 12 x 2 + a 13 x 3 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + a
05 Lineare Gleichungssysteme Wir betrachten ein System von m Gleichungen in n Unbestimmten (Unbekannten) x 1,, x n von der Form a 11 x 1 + a 12 x 2 + a 13 x 3 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + a
1. Transport- und Zuordnungsprobleme
 1. Transport- und Zuordnungsprobleme Themen 1. Transport- und Zuordnungsprobleme Themen: Analyse der Problemstruktur Spezielle Varianten des Simplexalgorithmus für Transport- und Zuordnungsprobleme Bezug
1. Transport- und Zuordnungsprobleme Themen 1. Transport- und Zuordnungsprobleme Themen: Analyse der Problemstruktur Spezielle Varianten des Simplexalgorithmus für Transport- und Zuordnungsprobleme Bezug
8. Elemente der linearen Algebra 8.5 Quadratische Matrizen und Determinanten
 Einheitsmatrix Die quadratische Einheitsmatrix I n M n,n ist definiert durch I n = 1 0 0 0 1 0 0 0 1 (Auf der Hauptdiagonalen stehen Einsen, außerhalb Nullen Durch Ausmultiplizieren sieht man I n A = A
Einheitsmatrix Die quadratische Einheitsmatrix I n M n,n ist definiert durch I n = 1 0 0 0 1 0 0 0 1 (Auf der Hauptdiagonalen stehen Einsen, außerhalb Nullen Durch Ausmultiplizieren sieht man I n A = A
Numerik für Informatiker und Bioinformatiker. Daniel Weiß
 Numerik für Informatiker und Bioinformatiker Daniel Weiß SS 202 Folgende Literatur bildet die Grundlage dieser Vorlesung: P Deuflhard, A Hohmann, Numerische Mathematik, Eine algorithmisch orientierte Einführung,
Numerik für Informatiker und Bioinformatiker Daniel Weiß SS 202 Folgende Literatur bildet die Grundlage dieser Vorlesung: P Deuflhard, A Hohmann, Numerische Mathematik, Eine algorithmisch orientierte Einführung,
a 21 a 22 a 21 a 22 = a 11a 22 a 21 a 12. Nun zur Denition und Berechnung von n n-determinanten: ( ) a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 A =
 a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 A =") 3 Determinanten Man bestimmt Determinanten nur von quadratischen Matrizen Wir werden die Berechnung von Determinanten rekursiv durchfuhren, dh wir denieren wie man eine 2 2-Determinante berechnet und fuhren
3 Determinanten Man bestimmt Determinanten nur von quadratischen Matrizen Wir werden die Berechnung von Determinanten rekursiv durchfuhren, dh wir denieren wie man eine 2 2-Determinante berechnet und fuhren
6 Korrektheit des Simplexalgorithmus
 6 Korrektheit des Simplexalgorithmus Folgerung: Es sei L: Ax = b, c T x max LP und A B nicht-degenerierte PZB von L und es gebe c r := c r c B A B A r > 0 a) Falls a r := A B a r 0, dann L unbeschränkt
6 Korrektheit des Simplexalgorithmus Folgerung: Es sei L: Ax = b, c T x max LP und A B nicht-degenerierte PZB von L und es gebe c r := c r c B A B A r > 0 a) Falls a r := A B a r 0, dann L unbeschränkt
8.2 Invertierbare Matrizen
 38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
Mitschrift der Vorlesung: Kombinatorische Optimierung
 Mitschrift der Vorlesung: Kombinatorische Optimierung bei Prof. Socher-Ambrosius Niels-Peter de Witt 26. April 2002 Inhaltsverzeichnis 1 Einführung 2 1.1 Beispiel: Profil zersägen.......................
Mitschrift der Vorlesung: Kombinatorische Optimierung bei Prof. Socher-Ambrosius Niels-Peter de Witt 26. April 2002 Inhaltsverzeichnis 1 Einführung 2 1.1 Beispiel: Profil zersägen.......................
4.1. Basislösung und kanonische Form
 4.1. asislösung und kanonische Form ekannt: Jedes LOP kann äquivalent in ein Programm vom Typ III umgeformt werden. Jedes nichtleere Polyeder vom Typ III ist spitz. Für ein LOP vom Typ III gehört im Falle
4.1. asislösung und kanonische Form ekannt: Jedes LOP kann äquivalent in ein Programm vom Typ III umgeformt werden. Jedes nichtleere Polyeder vom Typ III ist spitz. Für ein LOP vom Typ III gehört im Falle
Basiswissen Matrizen
 Basiswissen Matrizen Mathematik GK 32 Definition (Die Matrix) Eine Matrix A mit m Zeilen und n Spalten heißt m x n Matrix: a a 2 a 4 A a 2 a 22 a 24 a 4 a 42 a 44 Definition 2 (Die Addition von Matrizen)
Basiswissen Matrizen Mathematik GK 32 Definition (Die Matrix) Eine Matrix A mit m Zeilen und n Spalten heißt m x n Matrix: a a 2 a 4 A a 2 a 22 a 24 a 4 a 42 a 44 Definition 2 (Die Addition von Matrizen)
Proseminar Lineare Algebra WS 08/09 Prof. Dr. O. Bogopolski 1. Vortrag: Lineare Gleichungen. am 11. März von Maximilian Wahner
 Proseminar Lineare Algebra WS 08/09 Prof. Dr. O. Bogopolski 1 Vortrag: Lineare Gleichungen am 11. März 2009 von Maximilian Wahner Technische Universität Dortmund Fakultät für Mathematik Proseminar Lineare
Proseminar Lineare Algebra WS 08/09 Prof. Dr. O. Bogopolski 1 Vortrag: Lineare Gleichungen am 11. März 2009 von Maximilian Wahner Technische Universität Dortmund Fakultät für Mathematik Proseminar Lineare
1 Der Simplex Algorithmus I
 1 Nicoletta Andri 1 Der Simplex Algorithmus I 1.1 Einführungsbeispiel In einer Papiermühle wird aus Altpapier und anderen Vorstoffen feines und grobes Papier hergestellt. Der Erlös pro Tonne feines Papier
1 Nicoletta Andri 1 Der Simplex Algorithmus I 1.1 Einführungsbeispiel In einer Papiermühle wird aus Altpapier und anderen Vorstoffen feines und grobes Papier hergestellt. Der Erlös pro Tonne feines Papier
1 Matrizenrechnung zweiter Teil
 MLAN1 1 Literatur: K. Nipp/D. Stoffer, Lineare Algebra, Eine Einführung für Ingenieure, VDF der ETHZ, 4. Auflage, 1998, oder neuer. 1 Matrizenrechnung zweiter Teil 1.1 Transponieren einer Matrix Wir betrachten
MLAN1 1 Literatur: K. Nipp/D. Stoffer, Lineare Algebra, Eine Einführung für Ingenieure, VDF der ETHZ, 4. Auflage, 1998, oder neuer. 1 Matrizenrechnung zweiter Teil 1.1 Transponieren einer Matrix Wir betrachten
9.2 Invertierbare Matrizen
 34 9.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
34 9.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
Inhaltsverzeichnis. 4 Praxisbeispiel 7
 Inhaltsverzeichnis Geschichte und Entwicklung. Grundidee................................2 George B. Dantzig...........................3 Diäten-Problem von G.J. Stigler.................. 2.4 John von Neumann
Inhaltsverzeichnis Geschichte und Entwicklung. Grundidee................................2 George B. Dantzig...........................3 Diäten-Problem von G.J. Stigler.................. 2.4 John von Neumann
Vorlesung Lineare Optimierung (Sommersemester 2009)
") 1 Vorlesung Lineare Optimierung (Sommersemester 2009) Kapitel 7: Der Simplex-Algorithmus Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom 18. Juni 2009) Gliederung 2 Ecken, Kanten, Extremalstrahlen
1 Vorlesung Lineare Optimierung (Sommersemester 2009) Kapitel 7: Der Simplex-Algorithmus Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom 18. Juni 2009) Gliederung 2 Ecken, Kanten, Extremalstrahlen
Prof. Dr. Roland Griesse. Höhere Mathematik für Bachelorstudiengänge I.2
 Höhere Mathematik für Bachelorstudiengänge I.2 Wir nehmen an, dass die LOA bereits in Normalform vorliegt: Maximiere c x, wobei A x = b sowie x 0 mit A R m n, b R m und c R n. Neben b 0 nehmen wir noch
Höhere Mathematik für Bachelorstudiengänge I.2 Wir nehmen an, dass die LOA bereits in Normalform vorliegt: Maximiere c x, wobei A x = b sowie x 0 mit A R m n, b R m und c R n. Neben b 0 nehmen wir noch
VORLESUNG 14 Lineare Optimierung, Dualität (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt)
") VORLESUNG 14 Lineare Optimierung, Dualität (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 96 H. Meyerhenke: Kombinatorische Optimierung Dualität bei linearen Programmen Def.: Es sei (L): c T x max
VORLESUNG 14 Lineare Optimierung, Dualität (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 96 H. Meyerhenke: Kombinatorische Optimierung Dualität bei linearen Programmen Def.: Es sei (L): c T x max
Lösung allgemeiner linearer Programme
 Lösung allgemeiner linearer Programme Bisher: Für Anwendung des Simplexalgorithmus muss eine primal oder eine dual zulässige Basislösung vorliegen. Für allgemeine lineare Programme können wir dies direkt
Lösung allgemeiner linearer Programme Bisher: Für Anwendung des Simplexalgorithmus muss eine primal oder eine dual zulässige Basislösung vorliegen. Für allgemeine lineare Programme können wir dies direkt
Lineare Programmierung Teil I
 Seminar über Algorithmen Prof. Dr. Helmut Alt Lineare Programmierung Teil I Lena Schlipf, Benjamin Jankovic Lena Schlipf, Benjamin Jankovic Seminar über Algorithmen SS05 1 Struktur des Vortrags 1. Was
Seminar über Algorithmen Prof. Dr. Helmut Alt Lineare Programmierung Teil I Lena Schlipf, Benjamin Jankovic Lena Schlipf, Benjamin Jankovic Seminar über Algorithmen SS05 1 Struktur des Vortrags 1. Was
mit. Wir definieren (Skalarprodukt = Winkel).
.") 1 Grundidee des Simplexverfahrens (von George Dantzig): Man bestimmt eine beliebige Ecke (Extremalpunkt) einer Lösungsmenge eines Ungleichungssystems. Nun geht man an den Kanten vom Punkt entlang und kontrolliert
1 Grundidee des Simplexverfahrens (von George Dantzig): Man bestimmt eine beliebige Ecke (Extremalpunkt) einer Lösungsmenge eines Ungleichungssystems. Nun geht man an den Kanten vom Punkt entlang und kontrolliert
3. Der Simplexalgorithmus Der Simplexalgorithmus 3.1 Formen des Linearen Optimierungsproblem. (3.1) Allgemeine Form !"#! " # # R $ %!
 Allgemeine Form !#! # # R $ %!") 11 3.1 Formen des Linearen Optimierungsproblem... 12 3.2 Zulässige Basislösungen... 13 3.3 Die Geometrie von Linearen Programmen... 14 3.4 Lokale Suche unter den zulässigen Basislösungen... 15 3.5 Organisation
11 3.1 Formen des Linearen Optimierungsproblem... 12 3.2 Zulässige Basislösungen... 13 3.3 Die Geometrie von Linearen Programmen... 14 3.4 Lokale Suche unter den zulässigen Basislösungen... 15 3.5 Organisation
Determinanten. I. Permutationen
 Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
3 Matrizenrechnung. 3. November
 3. November 008 4 3 Matrizenrechnung 3.1 Transponierter Vektor: Die Notation x R n bezieht sich per Definition 1 immer auf einen stehenden Vektor, x 1 x x =.. x n Der transponierte Vektor x T ist das zugehörige
3. November 008 4 3 Matrizenrechnung 3.1 Transponierter Vektor: Die Notation x R n bezieht sich per Definition 1 immer auf einen stehenden Vektor, x 1 x x =.. x n Der transponierte Vektor x T ist das zugehörige
37 Gauß-Algorithmus und lineare Gleichungssysteme
 37 Gauß-Algorithmus und lineare Gleichungssysteme 37 Motivation Lineare Gleichungssysteme treten in einer Vielzahl von Anwendungen auf und müssen gelöst werden In Abschnitt 355 haben wir gesehen, dass
37 Gauß-Algorithmus und lineare Gleichungssysteme 37 Motivation Lineare Gleichungssysteme treten in einer Vielzahl von Anwendungen auf und müssen gelöst werden In Abschnitt 355 haben wir gesehen, dass
Lineare Algebra. 5. Übungsstunde. Steven Battilana. battilana.uk/teaching
 Lineare Algebra. Übungsstunde Steven Battilana [email protected] battilana.uk/teaching October 2, 207 Erinnerung Definition. Ein Skalarprodukt ist eine Abbildung, : E n E n E, v, w v, w = n k= v
Lineare Algebra. Übungsstunde Steven Battilana [email protected] battilana.uk/teaching October 2, 207 Erinnerung Definition. Ein Skalarprodukt ist eine Abbildung, : E n E n E, v, w v, w = n k= v
Teil I. Lineare Optimierung
 Teil I Lineare Optimierung 5 Kapitel 1 Grundlagen Definition 1.1 Lineares Optimierungsproblem, lineares Programm. Eine Aufgabenstellung wird lineares Optimierungsproblem oder lineares Programm genannt,
Teil I Lineare Optimierung 5 Kapitel 1 Grundlagen Definition 1.1 Lineares Optimierungsproblem, lineares Programm. Eine Aufgabenstellung wird lineares Optimierungsproblem oder lineares Programm genannt,
1. Lineare Optimierungsaufgaben (LOA) als Teilklasse konvexer Optimierungsprobleme. f(x) min, x G (1.1) (Legende)
 als Teilklasse konvexer Optimierungsprobleme. f(x) min, x G (1.1) (Legende)") . Lineare Optimierungsaufgaben (LOA) als Teilklasse konvexer Optimierungsprobleme X Banachraum, wobei X = R n G zulässige Menge des Optimierungsproblems f: G R Zielfunktion f(x) min, x G (.) (Legende)
. Lineare Optimierungsaufgaben (LOA) als Teilklasse konvexer Optimierungsprobleme X Banachraum, wobei X = R n G zulässige Menge des Optimierungsproblems f: G R Zielfunktion f(x) min, x G (.) (Legende)
Ausgewählte Lösungen zu den Übungsblättern 4-5
 Fakultät für Luft- und Raumfahrttechnik Institut für Mathematik und Rechneranwendung Vorlesung: Lineare Algebra (ME), Prof. Dr. J. Gwinner Ausgewählte en zu den Übungsblättern -5 Aufgabe, Lineare Unabhängigkeit
Fakultät für Luft- und Raumfahrttechnik Institut für Mathematik und Rechneranwendung Vorlesung: Lineare Algebra (ME), Prof. Dr. J. Gwinner Ausgewählte en zu den Übungsblättern -5 Aufgabe, Lineare Unabhängigkeit
10. Die Berücksichtigung nicht vorzeichenbeschränkter Variablen
 10. Die Berücksichtigung nicht vorzeichenbeschränkter Variablen Bisher haben wir immer vorausgesetzt, dass alle Variablen eines LOP der Bedingung x i 0 liegen. Im Folgenden wollen wir auch sogenannte freie
10. Die Berücksichtigung nicht vorzeichenbeschränkter Variablen Bisher haben wir immer vorausgesetzt, dass alle Variablen eines LOP der Bedingung x i 0 liegen. Im Folgenden wollen wir auch sogenannte freie
Determinanten. I. Permutationen
 Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Operations Research. Ganzzahlige lineare Programme. ganzzahlige lineare Programme. Ganzzahlige lineare Programme. Rainer Schrader. 25.
 Operations Research Rainer Schrader Ganzzahlige lineare Programme Zentrum für Angewandte Informatik Köln 25. Juni 2007 1 / 49 2 / 49 Ganzzahlige lineare Programme Gliederung ganzzahlige lineare Programme
Operations Research Rainer Schrader Ganzzahlige lineare Programme Zentrum für Angewandte Informatik Köln 25. Juni 2007 1 / 49 2 / 49 Ganzzahlige lineare Programme Gliederung ganzzahlige lineare Programme
1 Lineare Optimierung, Simplex-Verfahren
 1 Lineare Optimierung, Simplex-Verfahren 1.1 Einführung Beispiel: In einer Fabrik werden n Produkte A 1, A 2,..., A n hergestellt. Dazu werden m Rohstoffe B 1, B 2,..., B m (inklusive Arbeitskräfte und
1 Lineare Optimierung, Simplex-Verfahren 1.1 Einführung Beispiel: In einer Fabrik werden n Produkte A 1, A 2,..., A n hergestellt. Dazu werden m Rohstoffe B 1, B 2,..., B m (inklusive Arbeitskräfte und
D-MAVT Lineare Algebra I HS 2017 Prof. Dr. N. Hungerbühler. Lösungen Serie 10
 D-MAVT Lineare Algebra I HS 2017 Prof. Dr. N. Hungerbühler Lösungen Serie 10 1. Für a 1 : 1 1 0, a 2 : 1 1, a 3 : 1 1 1, b : 2 2 2 1 und A : (a 1, a 2, a 3 ) gelten welche der folgenden Aussagen? (a) det(a)
D-MAVT Lineare Algebra I HS 2017 Prof. Dr. N. Hungerbühler Lösungen Serie 10 1. Für a 1 : 1 1 0, a 2 : 1 1, a 3 : 1 1 1, b : 2 2 2 1 und A : (a 1, a 2, a 3 ) gelten welche der folgenden Aussagen? (a) det(a)
Aufwand und Komplexität Vorlesung vom Komplexität und Effizienz
 Aufwand und Komplexität Vorlesung vom 15.12.17 Komplexität und Effizienz Aufwand: Anzahl dominanter Operationen (worst-case). Beispiel. Landau-Symbol O(n). Beispiel. Definition: Aufwand eines Algorithmus.
Aufwand und Komplexität Vorlesung vom 15.12.17 Komplexität und Effizienz Aufwand: Anzahl dominanter Operationen (worst-case). Beispiel. Landau-Symbol O(n). Beispiel. Definition: Aufwand eines Algorithmus.
Methoden der linearen Optimierung
 Methoden der linearen Optimierung Mike Hüftle 31. Juli 2006 Inhaltsverzeichnis 1 Einleitung 2 1.1.................................... 2 2 Lineare Optimierung 3 2.1 Lineares Modell............................
Methoden der linearen Optimierung Mike Hüftle 31. Juli 2006 Inhaltsverzeichnis 1 Einleitung 2 1.1.................................... 2 2 Lineare Optimierung 3 2.1 Lineares Modell............................
Lineares Optimieren. W. Kippels 12. April Inhaltsverzeichnis. 1 Einleitung 2. 2 Die Beispielaufgabe 2. 3 Einführung von Schlupfvariablen 2
 Lineares Optimieren W. Kippels 1. April 015 Inhaltsverzeichnis 1 Einleitung Die Beispielaufgabe Einführung von Schlupfvariablen 4 Die Simplex-Methode 5 Das Basis-Austauschverfahren 4 6 Fortsetzung der
Lineares Optimieren W. Kippels 1. April 015 Inhaltsverzeichnis 1 Einleitung Die Beispielaufgabe Einführung von Schlupfvariablen 4 Die Simplex-Methode 5 Das Basis-Austauschverfahren 4 6 Fortsetzung der
Lösungsskizzen zu den Klausuraufgaben zum Kurs 1142 Algorithmische Mathematik
 Lösungsskizzen zu den Klausuraufgaben zum Kurs 1142 Algorithmische Mathematik 1142KWL09 Aufgabe 1. Zeigen Sie, dass für alle n 2 gilt: n paarweise verschiedene Geraden im R 2 schneiden sich untereinander
Lösungsskizzen zu den Klausuraufgaben zum Kurs 1142 Algorithmische Mathematik 1142KWL09 Aufgabe 1. Zeigen Sie, dass für alle n 2 gilt: n paarweise verschiedene Geraden im R 2 schneiden sich untereinander
Determinanten - II. Falls n = 1, gibt es offenbar nur die identische Permutation, und für eine 1 1 Matrix A = (a) gilt det A = a.
 gilt det A = a.") Determinanten - II. Berechnung von Determinanten Wir erinnern, dass für A M(n n; K) gilt : det A = σ S n signσ a σ() a 2σ(2)...a nσ(n). Falls n =, gibt es offenbar nur die identische Permutation, und für
Determinanten - II. Berechnung von Determinanten Wir erinnern, dass für A M(n n; K) gilt : det A = σ S n signσ a σ() a 2σ(2)...a nσ(n). Falls n =, gibt es offenbar nur die identische Permutation, und für
3 Determinanten, Eigenwerte, Normalformen
 Determinanten, Eigenwerte, Normalformen.1 Determinanten Beispiel. Betrachte folgendes Parallelogramm in der Ebene R 2 : y (a + c, b + d) (c, d) (a, b) x Man rechnet leicht nach, dass die Fläche F dieses
Determinanten, Eigenwerte, Normalformen.1 Determinanten Beispiel. Betrachte folgendes Parallelogramm in der Ebene R 2 : y (a + c, b + d) (c, d) (a, b) x Man rechnet leicht nach, dass die Fläche F dieses
5.4 Basis, Lineare Abhängigkeit
 die allgemeine Lösung des homogenen Systems. Wieder ist 2 0 L i = L h + 0 1 Wir fassen noch einmal zusammen: Ein homogenes lineares Gleichungssystem A x = 0 mit m Gleichungen und n Unbekannten hat n Rang(A)
die allgemeine Lösung des homogenen Systems. Wieder ist 2 0 L i = L h + 0 1 Wir fassen noch einmal zusammen: Ein homogenes lineares Gleichungssystem A x = 0 mit m Gleichungen und n Unbekannten hat n Rang(A)
8.2 Invertierbare Matrizen
 38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
5.1 Determinanten der Ordnung 2 und 3. a 11 a 12 a 21 a 22. det(a) =a 11 a 22 a 12 a 21. a 11 a 21
 =a 11 a 22 a 12 a 21. a 11 a 21") 5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
Aufgaben zu Kapitel 23
 Aufgaben zu Kapitel 23 Aufgaben zu Kapitel 23 Verständnisfragen Aufgabe 23 Bestimmen Sie grafisch die optimale Lösung x der Zielfunktion z = c T x unter den Nebenbedingungen mit dem Zielfunktionsvektor
Aufgaben zu Kapitel 23 Aufgaben zu Kapitel 23 Verständnisfragen Aufgabe 23 Bestimmen Sie grafisch die optimale Lösung x der Zielfunktion z = c T x unter den Nebenbedingungen mit dem Zielfunktionsvektor
a 11 a 12 a 1(m 1) a 1m a n1 a n2 a n(m 1) a nm Matrizen Betrachten wir das nachfolgende Rechteckschema:
 a 1m a n1 a n2 a n(m 1) a nm Matrizen Betrachten wir das nachfolgende Rechteckschema:") Matrizen Betrachten wir das nachfolgende Rechteckschema: a 12 a 1(m 1 a 1m a n1 a n2 a n(m 1 a nm Ein solches Schema nennt man (n m-matrix, da es aus n Zeilen und m Spalten besteht Jeder einzelne Eintrag
Matrizen Betrachten wir das nachfolgende Rechteckschema: a 12 a 1(m 1 a 1m a n1 a n2 a n(m 1 a nm Ein solches Schema nennt man (n m-matrix, da es aus n Zeilen und m Spalten besteht Jeder einzelne Eintrag
Simplex-Verfahren. Kapitel 3. Simplex-Verfahren. Peter Becker (H-BRS) Lineare und kombinatorische Optimierung Wintersemester 2017/ / 372
 Lineare und kombinatorische Optimierung Wintersemester 2017/ / 372") Kapitel 3 Simplex-Verfahren Peter Becker (H-BRS) Lineare und kombinatorische Optimierung Wintersemester 2017/18 104 / 372 Inhalt Inhalt 3 Simplex-Verfahren Primaler Simplexalgorithmus Unbeschränktheit
Kapitel 3 Simplex-Verfahren Peter Becker (H-BRS) Lineare und kombinatorische Optimierung Wintersemester 2017/18 104 / 372 Inhalt Inhalt 3 Simplex-Verfahren Primaler Simplexalgorithmus Unbeschränktheit
Cramersche Regel. Satz 2.26
 ramersche Regel Satz 6 Es sei A R n n eine quadratische Matrix mit det(a) 6= Für das LGS Ax = b sei A j := (a,,a j, b, a j+,,a n ), also die Matrix, die entsteht, wenn in A die j-te Spalte durch den Vektor
ramersche Regel Satz 6 Es sei A R n n eine quadratische Matrix mit det(a) 6= Für das LGS Ax = b sei A j := (a,,a j, b, a j+,,a n ), also die Matrix, die entsteht, wenn in A die j-te Spalte durch den Vektor
3 Elementare Umformung von linearen Gleichungssystemen und Matrizen
 3 Elementare Umformung von linearen Gleichungssystemen und Matrizen Beispiel 1: Betrachte das Gleichungssystem x 1 + x 2 + x 3 = 2 2x 1 + 4x 2 + 3x 3 = 1 3x 1 x 2 + 4x 3 = 7 Wir formen das GLS so lange
3 Elementare Umformung von linearen Gleichungssystemen und Matrizen Beispiel 1: Betrachte das Gleichungssystem x 1 + x 2 + x 3 = 2 2x 1 + 4x 2 + 3x 3 = 1 3x 1 x 2 + 4x 3 = 7 Wir formen das GLS so lange
Lineare Algebra I 3. Tutorium Inverse Matrizen und Gruppen
 Lineare Algebra I Tutorium Inverse Matrizen und Gruppen Fachbereich Mathematik WS / Prof Dr Kollross November Dr Le Roux Dipl-Math Susanne Kürsten Aufgaben Aufgabe G (Die zweite Variante des Gauß-Algorithmus)
Lineare Algebra I Tutorium Inverse Matrizen und Gruppen Fachbereich Mathematik WS / Prof Dr Kollross November Dr Le Roux Dipl-Math Susanne Kürsten Aufgaben Aufgabe G (Die zweite Variante des Gauß-Algorithmus)
Cramersche Regel. Satz Es sei A R n n eine quadratische Matrix mit det(a) 0. Für ein LGS Ax = b sei. A j := (a 1,...,a j 1,b,a j+1,...
 0. Für ein LGS Ax = b sei. A j := (a 1,...,a j 1,b,a j+1,...") Cramersche Regel Satz 2.4. Es sei A R n n eine quadratische Matrix mit det(a) 0. Für ein LGS Ax = b sei A j := (a,...,a j,b,a j+,...,a n ) also die Matrix, die entsteht, wenn in A die j-spalte durch den
Cramersche Regel Satz 2.4. Es sei A R n n eine quadratische Matrix mit det(a) 0. Für ein LGS Ax = b sei A j := (a,...,a j,b,a j+,...,a n ) also die Matrix, die entsteht, wenn in A die j-spalte durch den
bekannt: Eliminationsverfahren von Gauß Verfahren führt zu einer Zerlegung der Koeffizientenmatrix: A = LR A = LR
 LR-Zerlegung bekannt: Eliminationsverfahren von Gauß Verfahren führt zu einer Zerlegung der Koeffizientenmatrix: A = LR Definition 2.17 Unter einer LR-Zerlegung einer Matrix A R n n verstehen wir eine
LR-Zerlegung bekannt: Eliminationsverfahren von Gauß Verfahren führt zu einer Zerlegung der Koeffizientenmatrix: A = LR Definition 2.17 Unter einer LR-Zerlegung einer Matrix A R n n verstehen wir eine
Dr. Anita Kripfganz SS 2014
 Dr. Anita Kripfganz SS 2014 4. Lösungsverfahren 4.1. Schnittebenenmethode Im Jahre 1958 hat R. Gomory ein allgemeines Schnittebenenverfahren zur Lösung ganzzahliger linearer Optimierungsprobleme vorgeschlagen.
Dr. Anita Kripfganz SS 2014 4. Lösungsverfahren 4.1. Schnittebenenmethode Im Jahre 1958 hat R. Gomory ein allgemeines Schnittebenenverfahren zur Lösung ganzzahliger linearer Optimierungsprobleme vorgeschlagen.
Lineare Algebra I (WS 12/13)
") Lineare Algebra I (WS 12/13) Bernhard Hanke Universität Augsburg 17.10.2012 Bernhard Hanke 1 / 9 Wir beschreiben den folgenden Algorithmus zur Lösung linearer Gleichungssysteme, das sogenannte Gaußsche
Lineare Algebra I (WS 12/13) Bernhard Hanke Universität Augsburg 17.10.2012 Bernhard Hanke 1 / 9 Wir beschreiben den folgenden Algorithmus zur Lösung linearer Gleichungssysteme, das sogenannte Gaußsche
36 2 Lineare Algebra
 6 Lineare Algebra Quadratische Matrizen a a n sei jetzt n m, A, a ij R, i, j,, n a n a nn Definition Eine quadratische Matrix A heißt invertierbar genau dann, wenn es eine quadratische Matrix B gibt, so
6 Lineare Algebra Quadratische Matrizen a a n sei jetzt n m, A, a ij R, i, j,, n a n a nn Definition Eine quadratische Matrix A heißt invertierbar genau dann, wenn es eine quadratische Matrix B gibt, so