Verkehrsoptimierung: Umlaufplanung & Dienstplanung
|
|
|
- Otto Junge
- vor 6 Jahren
- Abrufe
Transkript



1 Verkehrsoptimierung: Umlaufplanung & Dienstplanung TU Berlin Summer Semester 2012 Lecture on June 11, 2012 & Martin Grötschel ZIB, TU, and MATHEON, Berlin DFG Research Center MATHEON Mathematics for key technologies Konrad-Zuse-Zentrum für Informationstechnik Berlin (ZIB) Löbel, & Weider GbR (LBW)
2 2 Gliederung Verkehrsoptimierung: ein kurzer Überblick Umlaufplanung Dienstplanung Integrierte Umlauf- und Dienstplanung Einige Ergebnisse
3 3 Gliederung Verkehrsoptimierung: ein kurzer Überblick Umlaufplanung Dienstplanung Integrierte Umlauf- und Dienstplanung Einige Ergebnisse





4 4 Planungsprozess im ÖPNV Angebotsplanung Operative Planung Betriebsleitung




5 5 Nachfrage



6 6 Netzentwurf
7 7 Linien


8 8 Fahrplan


9 9 Preise
10 10 Anschlüsse

11 11 Umläufe

12 12 Dienste
13 13 Integrierte Umlauf- und Dienstplanung
14 14 Dienstreihenfolge
15 15 Fahrzeug- und Personaldisposition
16 16 Betriebsleitung
17 17 Gliederung Verkehrsoptimierung: ein kurzer Überblick Umlaufplanung Dienstplanung Integrierte Umlauf- und Dienstplanung Einige Ergebnisse
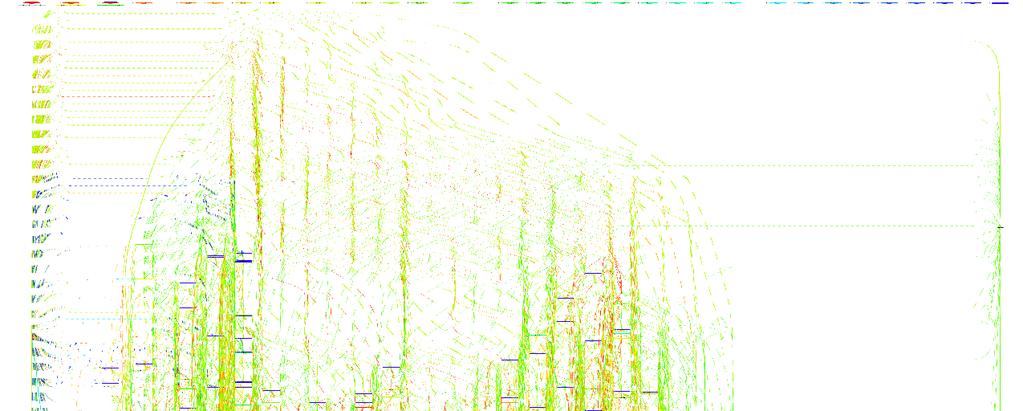
18 18 Umlaufplanung im ÖPNV
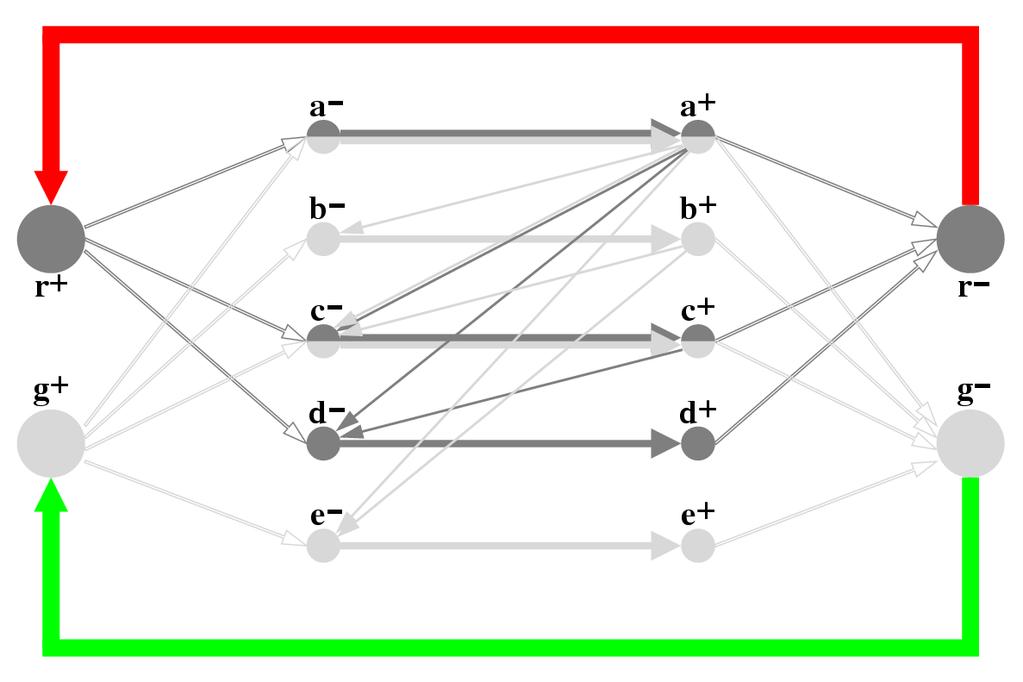
19 19 Ganzzahliges Programm (Mehrgüterflussproblem) min x d i d d j d ij ij d ij x x i i d 0 j c x x d ij d ij x k d ij d ij x d d jk k x d jk d {0,1} j, d j j d ij, d Lösungsansatz Lagrange-Relaxierung Vehicle flow Aggregated flow Timetabled trips Depot capacities Deadhead trips Subproblem: unabhängige Minimalkostenflussprobleme Subproblem: ein grosses Minimalkostenflussproblem


20 20 CINT 2006 Entwicklung von Qualitätssoftware, die sogar zu Hardwaretests verwendet wird.

21 21 CINT 2000
22 22 MCF Literatur Marty Itzkowitz, Brian J. N. Wylie, Christopher Aoki, and Nicolai Kosche: Memory Profiling using Hardware Counters ARCTiC Labs: 181.mcf - Datasets profile vs. Reference Dataset Joshua J. Yi, Resit Sendag, and David J. Lilja: Increasing Instruction-Level Parallelism with Instruction Precomputation Jinwoo Kim, Weng-Fai Wong, and Drishna V. Palem: Data Prefetching using Off-line Learning Resit Sendag, Peng-fei Chuang, and David J. Lilja: Address Correlation: Exceeding the Limits of Locality Kim M. Hazelwood, Mark C. Toburen, and Thomas M. Conte: A Case for Exploiting Memory-Access Persistence Ian R. Bratt, Alex Settle, and Daniel A. Connors: Predicate-Based Transformations to Eliminate Control and Data-Irrelevant Cache Misses Andreas Stiller: Hammer, Nägel und Köpfe: Das Microprocessor Forum 2001, c't 23/2001, S. 28
23 23 Lösung mit Lagrange-Relaxierung

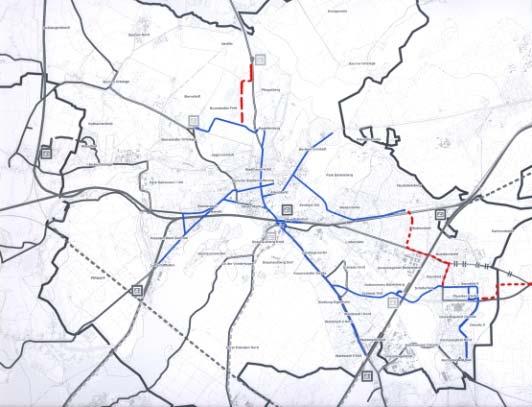
24 24 Fahrzeugeinsatz Martin Grötschel

25 25 several vehicle schedules Martin Grötschel
26 26 Szenarien BVG HHA VHH Betriebshöfe Fahrzeugtypen Fahrgastfahrten Leerfahrten
27 27 Behandlung zusätzlicher Restriktionen durch Strafkosten Keine Depotkapazitäten: Flottenminimum: Pausentaugliche Tagesspitzen: Linienwechsel: Wende: Weiche Ein-Aussetzfahrten Einsetzfahrten Linienwechselfahrten Obergrenzen Wenden Definition und Kosten von Fahrtenverknüpfungen Punkt-, zeit- oder fahrtgenaue Steuerung Fahrzeuge, Linien-, Fahrtartwechsel, Wenden, etc. Ein-Aussetzfahrten-, Leerfahrtenerzeugung Depotkapazitäten
28 28 Problem: Längenbedingungen s 0/5 5/ /4 7/2 4/ /1 1/1 t c/l = Kosten/Länge Gesucht: Kürzester st-weg der Länge Weg Kosten Länge c+ (l-8) 7 6 s12t s14t s34t
29 29 Gliederung Verkehrsoptimierung: ein kurzer Überblick Umlaufplanung Dienstplanung Integrierte Umlauf- und Dienstplanung Einige Ergebnisse
30 30 Längenbedingungen: Pausenregeln in der Dienstplanung Verordnung (EWG) Nr. 3820/85 des Rates vom 20. Dezember 1985 über die Harmonisierung bestimmter Sozialvorschriften im Straßenverkehr ABSCHNITT V Unterbrechungen und Ruhezeit Artikel 7 (1) Nach einer Lenkzeit von 4 1/2 Stunden ist eine Unterbrechung von mindestens 45 Minuten einzulegen, sofern der Fahrer keine Ruhezeit nimmt. (2) Diese Unterbrechung kann durch Unterbrechungen von jeweils mindestens 15 Minuten ersetzt werden, die in die Lenkzeit oder unmittelbar nach dieser so einzufügen sind, dass Absatz 1 eingehalten wird. (3) Im Falle des nationalen Personenlinienverkehrs können die Mitgliedstaaten abweichend von Absatz 1 die Mindestdauer für die Unterbrechung auf nicht weniger als 30 Minuten nach einer Lenkzeit von höchstens 4 Stunden festsetzen. Diese Ausnahmeregelung darf nur in Fällen gewährt werden, in denen durch Unterbrechungen der Lenkzeit von mehr als 30 Minuten der Stadtverkehr behindert würde und in denen es den Fahrern nicht möglich ist, in der Lenkzeit von 4 1/2 Stunden, die der Unterbrechung von 30 Minuten vorausgeht, eine Unterbrechung von 15 Minuten einzulegen. (4) Der Fahrer darf während dieser Unterbrechungen keine anderen Arbeiten ausführen. Für die Anwendung dieses Artikels gelten die Wartezeit und die Nicht-Lenkzeit, die in einem fahrenden Fahrzeug, auf einer Fähre oder in einem Zug verbracht werden, nicht als andere Arbeiten. (5) Nach diesem Artikel eingelegte Unterbrechungen dürfen nicht als tägliche Ruhezeit betrachtet werden.
31 31 Dienstplanungsproblem A H B Regeln: Lenkzeit 7 h, Verknüpfungen 3 h Kosten: 2+ Dienstzeit
32 32 Dienstplanungsproblem A H = =5 B Regeln: Lenkzeit 7 h, Verknüpfungen 3 h Kosten: 2+ Dienstzeit
33 33 Planungsgraph A 1 2 H B Regeln: Lenkzeit 7 h, Verknüpfungen 3 h Kosten: 2+ Dienstzeit
34 34 Planungsgraph (0,1) 4 (0,1) 4 (Zeit,Kosten) Dienst = 0-7 Pfad der Länge 7 h Dienstplan = Pfadüberdeckung
35 35 Planungsgraph (0,1) 4 (0,1) 4 (Zeit,Kosten) Dienst = 0-7 Pfad der Länge 7 h Dienstplan = Pfadüberdeckung
36 36 Alle Dienste B A C no c
37 37 Set-Partitioning-Modell no x1 x2 x3 x4 x5 x6 x7 x8 x9 x1 0 x1 1 x1 2 x1 3 x1 4 x1 5 x1 6 x1 7 x1 8 x1 9 x2 0 x2 1 x2 2 x2 3 x2 4 x2 5 x2 6 x2 7 x2 8 x2 9 x3 0 x3 1 x3 2 x3 3 x3 4 x3 5 x3 6 x3 7 min 5x 1 +5x x 36 +9x 37 s.t. x 1 +x 7 +x 8 +x 19 +x 20 +x 21 +x 22 +x 29 +x 30 +x 31 +x 36 =1 x 2 +x 7 +x 9 +x 10 +x 11 +x 12 +x 19 +x 20 +x 21 +x 22 +x 23 +x 24 +x 25 +x 32 +x 33 +x 34 +x 37 =1 x 3 +x 8 +x 9 +x 13 +x 14 +x 15 +x 19 +x 23 +x 24 +x 25 +x 26 +x 27 +x 29 +x 30 +x 32 +x 33 +x 35 +x 36 +x 37 =1 x 4 +x 10 +x 13 +x 16 +x 17 +x 20 +x 23 +x 26 +x 27 +x 28 +x 29 +x 30 +x 31 +x 32 +x 33 +x 34 +x 35 +x 36 +x 37 =1 x 5 +x 11 +x 14 +x 16 +x 18 +x 21 +x 24 +x 26 +x 28 +x 29 +x 31 +x 32 +x 34 +x 35 +x 36 +x 37 =1 x 6 +x 12 +x 15 +x 17 +x 18 +x 22 +x 25 +x 27 +x 28 +x 30 +x 31 +x 33 +x 34 +x 35 +x 36 +x 37 =1 x 1,...,x 37 0 x 1,...,x 37 ganz
38 38 Spaltenerzeugungsmethode (0,1) 4 (0,1)
39 39 Spaltenerzeugungsmethode (0,1) (0,1) "Tripperlösung": Kosten = 22
40 40 Spaltenerzeugungsmethode (0,1) (0,1) "Tripperlösung": Kosten = 22
41 41 Spaltenerzeugungsmethode no c y x x 1 =x 2 =x 3 =x 4 =x 5 =x 6 =1, Kosten 2*5+4*3=22 y 1 =5 y 2 =5 y 3 =3 y 4 =3 y 5 =3 y 6 =3
42 42 Spaltenerzeugungsmethode (0,1) (0,1) 3 Preise für Dienstelemente 3 3 "Tripperlösung": Kosten = 22
43 43 Spaltenerzeugungsmethode (0,1) (0,1) 3 Verbessernder Dienst: Kosten < Preis 3 3 Hier: 9 < 13
44 44 Spaltenerzeugungsmethode p n 0 1 1' 2 2' 3 3' 4 4' 5 5' 6 6' (0,1) (0,1) -3 Verbessernder Dienst: Kosten Preis < Hier: 9 13 = -4 < 0
45 45 Spaltenerzeugungsmethode (0,1) (0,1) "Tripperlösung": Kosten = 22 Verbessernder Dienst: Kosten Preis = 9 13 = -4 < 0
46 46 Spaltenerzeugungsmethode (0,1) (0,1) Neue Lösung: Kosten = 22 4 = 18 Verbessernder Dienst: Kosten Preis = 9 13 = -4 < 0
47 47 Spaltenerzeugungsmethode (0,1) (0,1) Preise für Dienstelemente Aktuelle Lösung: Kosten = 18
48 48 Spaltenerzeugung no c y x x 1 =x 2 =x 3 =0, x 4 =x 5 =x 6 = x 19 =1, Kosten 9+3*3=18 [22] y 1 +y 2 +y 3 =11 y 1 =1 y 2 =5 y 3 =3 y 4 =3 y 5 =3 y 6 =3 (andere Lösungen möglich)
49 49 Spaltenerzeugungsmethode 1 5 p1 5 p2 5 p3 3 p4 3 p5 3 p6 3 p p p (0,1) (0,1) 3 Preise für Dienstelemente Aktuelle Lösung: Kosten = 18 Verbessernder Dienst: Kosten Preis < 0 3 3
50 50 Spaltenerzeugungsmethode (0,1) (0,1) -3 Preise für Dienstelemente Aktuelle Lösung: Kosten = Verbessernder Dienst: Kosten Preis < 0
51 51 Spaltenerzeugungsmethode p n 0 1 1' 2 2' 3 3' 4 4' 5 5' 6 6' (0,1) (0,1) -3 Verbessernder Dienst: Kosten Preis < Hier: 9 14 = -5 < 0
52 52 Spaltenerzeugungsmethode p n 0 1 1' 2 2' 3 3' 4 4' 5 5' 6 6' (0,1) (0,1) -3 Verbessernder Dienst: Kosten Preis < Hier: = -1 < 0
53 53 Spaltenerzeugungsmethode (0,1) (0,1) Nimm neue Dienste ½ mal Neue "gebrochene" Lösung: Kosten = 18 5/2 1/2 = 15
54 54 Spaltenerzeugung no c y x ½ ½ ½ x 34 = x 34 = x 19 = 1/2, Kosten (9+9+12)/2=15 [18] y 1 +y 2 +y 3 =9 y 2 +y 4 +y 5 +y 6 =9 y 1 +y 3 +y 4 +y 5 +y 5 =12 y 1 =5, y 2 = y 4 = y 5 = 3, y 3 = 1, y 6 = 0
55 55 Spaltenerzeugungsmethode (0,1) (0,1) 3 p1 5 p2 5 p3 3 p4 3 p5 3 p6 3 p1 p2 p3 9 p2 p4 p5 p6 9 p p p p p Preise für Dienstelemente Aktuelle Lösung: Kosten = 15 Verbessernder Dienst: Kosten Preis < 0 3 0
56 56 Spaltenerzeugungsmethode p n 0 1 1' 2 2' 3 3' 4 4' 5 5' 6 6' (0,1) (0,1) -3 Verbessernder Dienst: Kosten Preis < Hier: 5 6 = -1 < 0
57 57 Spaltenerzeugungsmethode (0,1) (0,1) Neue Lösung: Kosten = 15 1 = 14 Verbessernder Dienst: Kosten Preis = 5 6 = -1 < 0
58 58 Spaltenerzeugung no c y x 1 1 x 19 = x 28 = 1, Kosten 9+5=14 [15] y 1 +y 2 +y 3 =9 y 4 +y 5 +y 6 =5 y 1 = 5, y 2 = 3, y 3 = y 6 = 1, y 4 = y 5 = 2 Kein Dienst unterbietet die Preise Dualitätssatz (oder Simplexkriterium) x* und y* sind optimal
59 59 Spaltenerzeugungsmethode (0,1) (0,1) 2 p1 5 p2 5 p3 3 p4 3 p5 3 p6 3 p1 p2 p3 9 p2 p4 p5 p6 9 p1 p3 p4 p5 p6 12 p p p Preise für Dienstelemente Aktuelle Lösung: Kosten = 14 Verbessernder Dienst: Kosten Preis < 0 2 1
60 60 Spaltenerzeugungsmethode p n 0 1 1' 2 2' 3 3' 4 4' 5 5' 6 6' (0,1) (0,1) -2 Verbessernder Dienst: Kosten Preis < 0 Hier: Keiner => LP optimal, ganzzahlig => IP optimal! -2-1
61 61 Ganzzahliges Programm (Set-Partitioning-Problem mit Base-Constraints) min d c d x d t d x d 1 t Legs d m x d m m Bases Mix x d {0,1} d Integrality
62 62 Spaltenerzeugungsmethode (Branch-and-Generate, Marsten 1994) Start Berechne Preise Bilde Löse Dienst- Dienste Nein planungs- problem (LP) Alles fixiert? Ja Ende Nein Stop? Ja Fixiere Dienste Löse Dienstplanungsproblem (IP) Mathematisches Modell



63 63 Ergänzungselemente n n n n n n n n n n
64 64 Gliederung Verkehrsoptimierung: ein kurzer Überblick Umlaufplanung Dienstplanung Integrierte Umlauf- und Dienstplanung Einige Ergebnisse
65 65 Graphentheoretisches Modell Umlaufplanung Dienstplanung Integrierte Planung
66 66 IP Modell (ISP) min C D dt dt T c x out in (1a) x( ( v)) x( ( v)) 0, depots g,trips v (1b) (1c) (2a) (2b) g out x( ( v)) 1, v V \{ s, t} a A k (3) Cx Dy 0 g f x ak a T d y Ay 1 By b m x {0,1}, y {0,1}, K 1, falls Leerfahrt d Dienstelement t enthält : 0, sonst 1, falls Dienstelement t von Dienst d überdeckt wird : 0, sonst n k
67 g 1 g2 67 Struktur des Problems Bögen Dienste g 3 g4 g 5 jew Fahrten g Zeilen g7 Kopplung der Depots Dienste Kopplungsbedingungen Zeilen Zeilen
68 68 Bündel-Methode zur Behandlung der Kopplungsbedingungen (Kiwiel [1990], Helmberg [2000]) Max f( ): min c x ( b Ax), X konvex x X f polyedrisch (stückweise linear) T T T T f ( ) c x ( b Ax ) ˆf f 1 fˆ ( ): min ( ) k J k f f 2 ˆ uk ˆ k 1 argmax fk( ) k 2
69 69 Vergleich Bündel- u.a. Verfahren auf einem Dienstplanungsproblem Dienstplanungsproblem Ivu41: Spalten, Zeilen 10,5 Non-zeroes pro Spalte Coordinate Ascent: Schnell Subgradient: Konvergiert theoretisch Volume: Primalapproximation Bundle+AS: Kovergenz + Primalapprox. Dual Simplex: Primal+dual optimal Barrier: Primal+dual optimal [s] Coordinate Ascent Subgradient Volume Bundle+AS Dual Simplex Barrier
70 70 Primalheuristik Perturbation Branching Iteratives Perturbieren der Zielfunktion und Lösen des LPs bis viele Variablen 1 sind. Node Selection binäres Backtracking Q j 4 Q j 2 Q j 1 Q j-1 i Q j m/2 Q j m/4 Q j m Untere Schranke mit approx. Bündelmethode
71 71 Vergleich: Zielfunktionswerte Rapid Branching und CPLEX Zielfkt.wert Ivu01 Ivu06 Ivu41 Ivu52 LP Rapid Branching CPLEX

72 72 Rechengang t[sec] time [s]
73 73 Integrierte Planung Artikel Ftypen FF v d Problem Ball et al. [1983] sequentielle Planung Scott [1985] VSP + Schätzung Dienstkosten Tosini & Vercellis [1988] VSP + zus. Bedingungen Falkner & Ryan [1992] DSP + zus. Bedingungen Patrikalakis et al. [1992] DSP + Min-Cost-Flow Gaffi & Nonato [1997] ISP ohne Ablösen Freling [1997] ISP Friberg & Haase [1997] DSP + SPP zur Optimalität Freling et al. [2000] ISP Huisman [2004] ISP Weider [2007] ISP + Kap. + Resourcenbed.
74 74 Gliederung Verkehrsoptimierung: ein kurzer Überblick Umlaufplanung Dienstplanung Integrierte Umlauf- und Dienstplanung Einige Ergebnisse

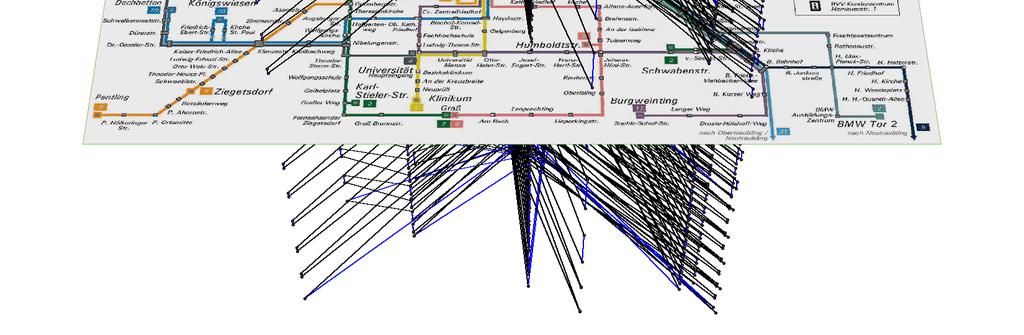
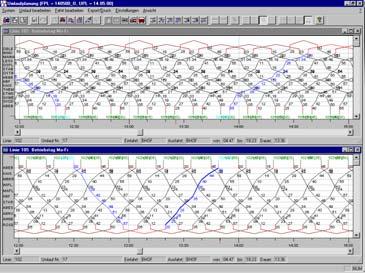
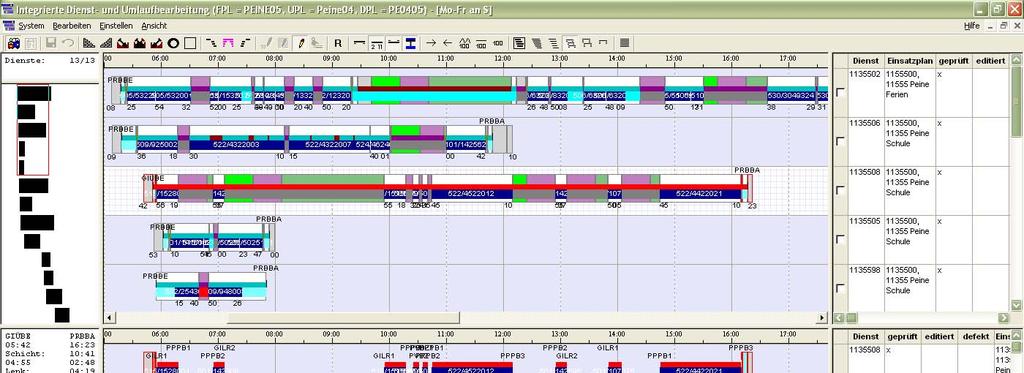
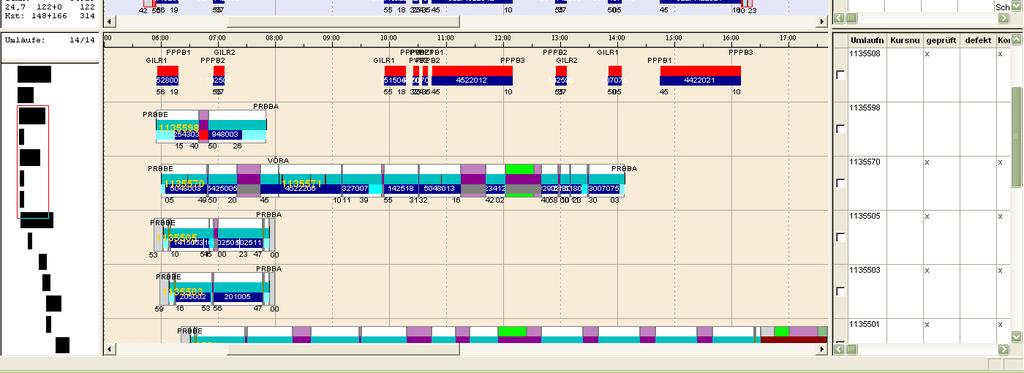
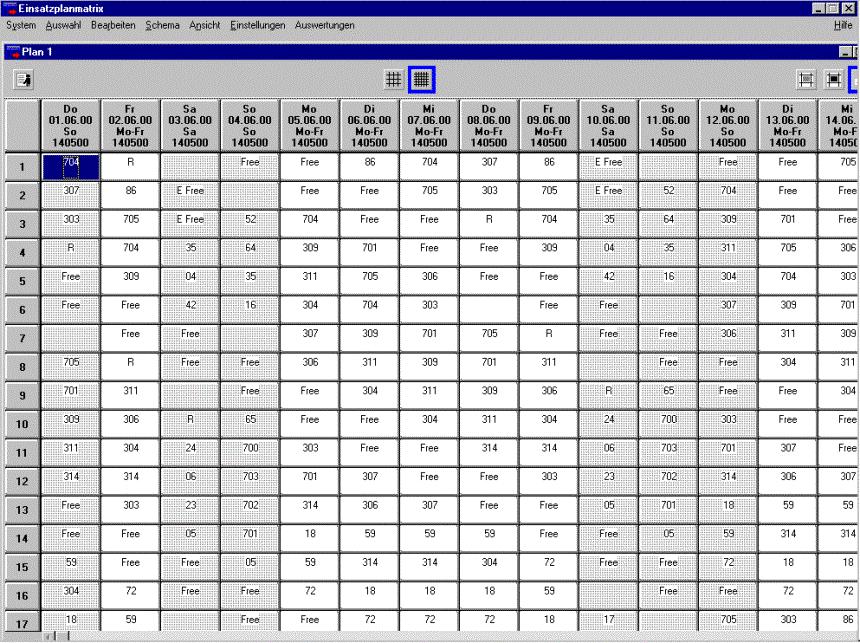
75 75 Umlaufplanung im ÖPNV

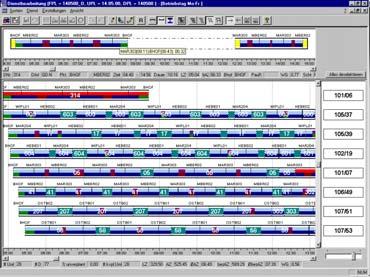
76 76 Dienstplanung im ÖPNV
77 77 Optimierungen mit MICROBUS 2 Fazit Fazit: Einsparziele durch die Optimierungen wurden voll erfüllt. Durch die vollständige Verplanung aller Dienststücke ist der manuelle Bearbeitungsaufwand - nach anfänglichem Mehraufwand durch Eingabe der Grunddaten - drastisch gesunken, so dass zu einem Fahrplanwechsel z.b. dem BR mehrere kostengünstige Varianten zur Auswahl vorgelegt werden können. Der Betrieb wird in die Lage versetzt, mehrere Varianten z.b. zur Kalkulation von zukünftigen Aufträgen zu erstellen. Heiko Klotzbücher In Bonn wird z.z. über die Verlagerung eines Busbetriebshofes nachgedacht. Mit der Umlauf- und Dienstplanoptimierung wurden wir in die Lage versetzt, die Kosten durch mehr Ein- und Aussetzkilometer bzw. -zeiten schnell und relativ genau zu ermitteln. Folie der SWB
78 78 Optimierungsprojekt ESWE Wiesbaden Ergebnisse Dienstaranzahl Dienst- bezahlte Zeit Dienstdauer Summe Mittel Summe Mittel Analyse ZUS :00 7: :00 7:43 GET :29 7:48 460:29 7:48 KURZ 6 7:59 1:19 7:59 1:19 Summe :28 7: :28 7:36 Szenario 1 ZUS :21 7: :21 7:36 wie Analyse,aber GET :44 8:06 463:14 8:07 Abzug 1x30 KURZ 4 3:36 0:54 3:36 0:54 Summe :41 7: :11 7:37 Szenario 2 ZUS :47 8: :47 8:30 wie Analyse,aber GET 76 (40)* 659:06 8:40 659:06 8:40 GET bis 19:00 KURZ 4 4:32 1:08 4:32 1:08 Summe :25 8: :25 8:26 Szenario 3 ZUS :46 8: :16 8:28 Abzug 1x30 GET 58 (38)* 503:36 8:40 504:36 8:42 GET bis 19:00 KURZ 0 Summe :22 8: :52 8:31 Szenario 4 ZUS :34 8: :34 8:46 Abzug 1x30 GET 67 (36)* 602:36 8:59 605:06 9:01 GET bis 20:00 KURZ 0 Summe :10 8: :40 8:50 * Anteil der geteilten Dienste mit Dienstende nach 18:00 Uhr Folie der ESWE IVU Traffic Technologies AG.. Martin Grötschel. Seite 78
")

79 79 BVG (Berlin)

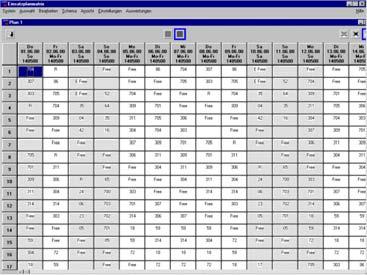
80 80 Plattform 09/2008


81 81 Plattform 09/2008
82 UITP Mai Jaeger optimization brings further improvements g Example optimization Folie der DB number of duties shift duration steering time 58-13,79 % * ,47 % * 9:19 h 10:28 h + 13,93 % * 6:25 h 7:19 h IST IS-Opt IST IS-Opt IST IS-Opt number of vehicles payable time breaks 51-5,88 % * ,26 % * 8:02 h 8:42 h + 42,53 % * 1:13 h unpaid 1:45 h -20%* paid 0:22 h 0:20 h + 13,20 % * IST IS-Opt IST IS-Opt IST IS-Opt 82 14

83 83 Dienstplanung im Luftverkehr




84 84 Trassenplanung im Bahnverkehr
85 Verkehrsoptimierung: Umlaufplanung & Dienstplanung TU Berlin Summer Semester 2012 Lecture on June 11, 2012 & Martin Grötschel ZIB, TU, and MATHEON, Berlin DFG Research Center MATHEON Mathematics for key technologies Konrad-Zuse-Zentrum für Informationstechnik Berlin (ZIB) Löbel, & Weider GbR (LBW)
Integrierte Umlauf- und Dienstplanung im ÖPNV
 Integrierte Umlauf- und Dienstplanung im ÖPNV Frico 2007 Weíder Dres. Löbel, Borndörfer und GbR Konrad-Zuse-Zentrum für Informationstechnik Berlin (ZIB) weider@zib.de http://www.zib.de/weider Planung im
Integrierte Umlauf- und Dienstplanung im ÖPNV Frico 2007 Weíder Dres. Löbel, Borndörfer und GbR Konrad-Zuse-Zentrum für Informationstechnik Berlin (ZIB) weider@zib.de http://www.zib.de/weider Planung im
Optimierung. Optimierung. Vorlesung 9 Lineare Programmierung & Kombinatorische Optimierung Fabian Kuhn
 Optimierung Vorlesung 9 Lineare Programmierung & Kombinatorische Optimierung 1 Assignment Problem (Zuordnungsproblem) Gewichtetes Perfektes Bipartites Matching agents Costs tasks Weise jedem Agenten genau
Optimierung Vorlesung 9 Lineare Programmierung & Kombinatorische Optimierung 1 Assignment Problem (Zuordnungsproblem) Gewichtetes Perfektes Bipartites Matching agents Costs tasks Weise jedem Agenten genau
Dienstplanoptimierung im ÖPNV
 Dienstplanoptimierung im ÖPNV Ralf Borndörfer Andreas Löbel Schlüsselworte. Öffentlicher Personennahverkehr, Dienstplanung, Optimierung Mathematics Subject Classification (MSC 1991). 90B06 1 Einführung
Dienstplanoptimierung im ÖPNV Ralf Borndörfer Andreas Löbel Schlüsselworte. Öffentlicher Personennahverkehr, Dienstplanung, Optimierung Mathematics Subject Classification (MSC 1991). 90B06 1 Einführung
Kap. 4.3: Das Dualitätstheorem der linearen Optimierung
 Kap. 4.3: Das Dualitätstheorem der linearen Optimierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 18. VO A&D WS 08/09 18.12.2008 1 Literatur
Kap. 4.3: Das Dualitätstheorem der linearen Optimierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 18. VO A&D WS 08/09 18.12.2008 1 Literatur
Robuste Effizienz in der Umlauf- und Dienstplanung im ÖPNV
 Department Wirtschaftsinformatik Fachbereich Wirtschaftswissenschaft Robuste Effizienz in der Umlauf- und Dienstplanung im ÖPNV Bastian Amberg Doktorandenworkshop, Magdeburg, 30. Mai 2013 Arbeitsbereiche
Department Wirtschaftsinformatik Fachbereich Wirtschaftswissenschaft Robuste Effizienz in der Umlauf- und Dienstplanung im ÖPNV Bastian Amberg Doktorandenworkshop, Magdeburg, 30. Mai 2013 Arbeitsbereiche
6. Softwarewerkzeuge für die Lineare Programmierung
 6. Softwarewerkzeuge für die Lineare Programmierung Inhalt 6. Softwarewerkzeuge für die Lineare Programmierung GNU Linear Programming Kit Operations Research I Hochschule Bonn-Rhein-Sieg, SS 2013 314 GNU
6. Softwarewerkzeuge für die Lineare Programmierung Inhalt 6. Softwarewerkzeuge für die Lineare Programmierung GNU Linear Programming Kit Operations Research I Hochschule Bonn-Rhein-Sieg, SS 2013 314 GNU
Das Linear Ordering Problem Exakte Lösungsverfahren. für NP-schwierige. VO Algorithm Engineering
 Das Linear Ordering Problem Exakte Lösungsverfahren VO Algorithm Engineering für NP-schwierige Professor Dr. Petra Mutzel kombinatorische Lehrstuhl für Algorithm Engineering, LS11 Optimierungsprobleme
Das Linear Ordering Problem Exakte Lösungsverfahren VO Algorithm Engineering für NP-schwierige Professor Dr. Petra Mutzel kombinatorische Lehrstuhl für Algorithm Engineering, LS11 Optimierungsprobleme
VORLESUNG 12 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt)
") VORLESUNG 12 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 53 Wiederholung! Basis-Startlösung berechnet! Künstliche Variablen! Erkennung von unlösbaren Problemen! Eliminierung
VORLESUNG 12 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 53 Wiederholung! Basis-Startlösung berechnet! Künstliche Variablen! Erkennung von unlösbaren Problemen! Eliminierung
Reproduzierbarkeit der Bachelor-Thesis
 der Bachelor-Thesis Anonymisierungsverfahren: Randverteilungen und ihr statistisches Analysepotential Seminar Institut für Statistik Ludwig-Maxmilians-Universität in München Betreuung: Manuel J. A. Eugster
der Bachelor-Thesis Anonymisierungsverfahren: Randverteilungen und ihr statistisches Analysepotential Seminar Institut für Statistik Ludwig-Maxmilians-Universität in München Betreuung: Manuel J. A. Eugster
Ganzzahlige Optimierung im öffentlichen Verkehr
 Ganzzahlige Optimierung im öffentlichen Verkehr Ralf Christian Marc TU Berlin Integrierte Veranstaltung im Wintersemester 26/7 Ralf Christian Marc DFG-Forschungszentrum MATHEON Mathematics for key technologies
Ganzzahlige Optimierung im öffentlichen Verkehr Ralf Christian Marc TU Berlin Integrierte Veranstaltung im Wintersemester 26/7 Ralf Christian Marc DFG-Forschungszentrum MATHEON Mathematics for key technologies
mit Ungleichungen als Restriktionen Quadratische Programmierung Gliederung Geodätische Woche 2009 Lutz Roese-Koerner und Wolf-Dieter Schuh
 . Geodätische Woche 29 Quadratische Programmierung mit Ungleichungen als Restriktionen 1 Lutz Roese-Koerner und Wolf-Dieter Schuh Institut für Geodäsie und Geoinformation Professur für Theoretische Geodäsie
. Geodätische Woche 29 Quadratische Programmierung mit Ungleichungen als Restriktionen 1 Lutz Roese-Koerner und Wolf-Dieter Schuh Institut für Geodäsie und Geoinformation Professur für Theoretische Geodäsie
Operations Research für Logistik
 Operations Research für Logistik Lineare Optimierung (170.202) Ao. Univ. - Prof. Norbert SEIFTER Dipl. - Ing. Stefanie VOLLAND Sommersemester 2012 Lehrstuhl Industrielogistik Lineare Optimierung Inhalte:
Operations Research für Logistik Lineare Optimierung (170.202) Ao. Univ. - Prof. Norbert SEIFTER Dipl. - Ing. Stefanie VOLLAND Sommersemester 2012 Lehrstuhl Industrielogistik Lineare Optimierung Inhalte:
Sandro Pirkwieser, (Bin Hu, Jakob Puchinger) SS 2010
 SS 2010") Lösungsverfahren für Ganzzahlige Optimierung Sandro Pirkwieser, (Bin Hu, Jakob Puchinger) Fortgeschrittene Algorithmen und Datenstrukturen Arbeitsbereich für Algorithmen und Datenstrukturen Institut für
Lösungsverfahren für Ganzzahlige Optimierung Sandro Pirkwieser, (Bin Hu, Jakob Puchinger) Fortgeschrittene Algorithmen und Datenstrukturen Arbeitsbereich für Algorithmen und Datenstrukturen Institut für
Dualitätssätze der linearen Optimierung
 Kapitel 9 Dualitätssätze der linearen Optimierung Sei z = c T x min! Ax = b 9.1 x 0 mit c, x R n, b R m, A R m n ein lineares Programm. Definition 9.1 Duales lineares Programm. Das lineare Programm z =
Kapitel 9 Dualitätssätze der linearen Optimierung Sei z = c T x min! Ax = b 9.1 x 0 mit c, x R n, b R m, A R m n ein lineares Programm. Definition 9.1 Duales lineares Programm. Das lineare Programm z =
Optimierung für Wirtschaftsinformatiker: Dualität, Ganzzahlige lineare Optimierung
 Optimierung für Wirtschaftsinformatiker: Dualität, Ganzzahlige lineare Optimierung Dr. Nico Düvelmeyer Freitag, 24. Juni 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Dualität Motivation Duales LP Dualitätssätze
Optimierung für Wirtschaftsinformatiker: Dualität, Ganzzahlige lineare Optimierung Dr. Nico Düvelmeyer Freitag, 24. Juni 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Dualität Motivation Duales LP Dualitätssätze
Optimierung für Wirtschaftsinformatiker: Lineare Programme
 Optimierung für Wirtschaftsinformatiker: Lineare Programme Dr. Nico Düvelmeyer Dienstag, 31. Mai 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Lineare Programme Allgemeine Form 2 Spezielle Darstellungen
Optimierung für Wirtschaftsinformatiker: Lineare Programme Dr. Nico Düvelmeyer Dienstag, 31. Mai 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Lineare Programme Allgemeine Form 2 Spezielle Darstellungen
Computer Science Department - High Performance and Web Computing Group. Optimierungsprobleme
 Optimierungsprobleme Häufig in Alltagssituationen anzutreffen (z.b. Kauf eines Gerätes) Optimierungsprobleme (OPs) sind Probleme, die i.a. viele zulässige Lösungen besitzen Jeder Lösung ist ein bestimmter
Optimierungsprobleme Häufig in Alltagssituationen anzutreffen (z.b. Kauf eines Gerätes) Optimierungsprobleme (OPs) sind Probleme, die i.a. viele zulässige Lösungen besitzen Jeder Lösung ist ein bestimmter
VORLESUNG 14 Lineare Optimierung, Dualität (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt)
") VORLESUNG 14 Lineare Optimierung, Dualität (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 96 H. Meyerhenke: Kombinatorische Optimierung Dualität bei linearen Programmen Def.: Es sei (L): c T x max
VORLESUNG 14 Lineare Optimierung, Dualität (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 96 H. Meyerhenke: Kombinatorische Optimierung Dualität bei linearen Programmen Def.: Es sei (L): c T x max
Kapitel 5. Peter Becker (H-BRS) Operations Research I Sommersemester / 298
 Operations Research I Sommersemester / 298") Kapitel 5 Dualität Peter Becker (H-BRS) Operations Research I Sommersemester 2014 241 / 298 Inhalt 5 Dualität Dualitätssätze Zweiphasen-Simplexalgorithmus Peter Becker (H-BRS) Operations Research I Sommersemester
Kapitel 5 Dualität Peter Becker (H-BRS) Operations Research I Sommersemester 2014 241 / 298 Inhalt 5 Dualität Dualitätssätze Zweiphasen-Simplexalgorithmus Peter Becker (H-BRS) Operations Research I Sommersemester
Computer-gestützter Entwurf von absatzweise arbeitenden chemischen Mehrproduktanlagen
 Research Collection Doctoral Thesis Computer-gestützter Entwurf von absatzweise arbeitenden chemischen Mehrproduktanlagen Author(s): Klossner, Jürg Publication Date: 1985 Permanent Link: https://doi.org/10.3929/ethz-a-000342601
Research Collection Doctoral Thesis Computer-gestützter Entwurf von absatzweise arbeitenden chemischen Mehrproduktanlagen Author(s): Klossner, Jürg Publication Date: 1985 Permanent Link: https://doi.org/10.3929/ethz-a-000342601
Umlaufplanung für den ÖV
 Umlaufplanung für den ÖV Josef Becker 21. September 2006 Inhaltsverzeichnis 1 Einleitung 2 1.1 Einführung.............................. 2 1.1.1 Nebenpfad: Definitionen................... 3 1.1.2 Nebenpfad:
Umlaufplanung für den ÖV Josef Becker 21. September 2006 Inhaltsverzeichnis 1 Einleitung 2 1.1 Einführung.............................. 2 1.1.1 Nebenpfad: Definitionen................... 3 1.1.2 Nebenpfad:
Kap. 4: Lineare Programmierung
 Kap. 4: Lineare Programmierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 13./14. VO A&D WS 08/09 27.11./2.12.2008 Petra Mutzel Alg. & Dat.
Kap. 4: Lineare Programmierung Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 Fakultät für Informatik, TU Dortmund 13./14. VO A&D WS 08/09 27.11./2.12.2008 Petra Mutzel Alg. & Dat.
Überblick Kap. 5: Graph Coloring
 Überblick Kap. 5: Graph Coloring Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 10./11. VO 18.12.0 / 8.1.07 5.1 Einführung Definition und Motivation Sudoku 5.2 ILP-Formulierungen
Überblick Kap. 5: Graph Coloring Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 10./11. VO 18.12.0 / 8.1.07 5.1 Einführung Definition und Motivation Sudoku 5.2 ILP-Formulierungen
INSTITUT FÜR THEORETISCHE INFORMATIK, PROF. SANDERS
 Julian Arz, Timo Bingmann, Sebastian Schlag INSTITUT FÜR THEORETISCHE INFORMATIK, PROF. SANDERS KIT Julian Universität Arz, des Timo LandesBingmann, Baden-Württemberg Sebastian und Schlag nationales 2.
Julian Arz, Timo Bingmann, Sebastian Schlag INSTITUT FÜR THEORETISCHE INFORMATIK, PROF. SANDERS KIT Julian Universität Arz, des Timo LandesBingmann, Baden-Württemberg Sebastian und Schlag nationales 2.
Minimumproblem. Definition 4.7. Ein LP der Form. unter den Nebenbedingungen. d ij x j b i (i =1,...,m)
") Minimumproblem Definition 4.7 Ein LP der Form nx Minimiere Z = c j x j j=1 unter den Nebenbedingungen nx d ij x j b i (i =1,...,m) j=1 und den Vorzeichenbedingungen x j 0(j =1,...,n) heißt Minimumproblem.
Minimumproblem Definition 4.7 Ein LP der Form nx Minimiere Z = c j x j j=1 unter den Nebenbedingungen nx d ij x j b i (i =1,...,m) j=1 und den Vorzeichenbedingungen x j 0(j =1,...,n) heißt Minimumproblem.
Scheduling und Lineare ProgrammierungNach J. K. Lenstra, D. B. Shmoys und É.
 Scheduling und Lineare ProgrammierungNach J. K. Lenstra, D. B. Shmoys und É. Tardos Janick Martinez Esturo jmartine@techfak.uni-bielefeld.de xx.08.2007 Sommerakademie Görlitz Arbeitsgruppe 5 Gliederung
Scheduling und Lineare ProgrammierungNach J. K. Lenstra, D. B. Shmoys und É. Tardos Janick Martinez Esturo jmartine@techfak.uni-bielefeld.de xx.08.2007 Sommerakademie Görlitz Arbeitsgruppe 5 Gliederung
Integrierte Umlauf- und Dienstplanung im Nahverkehr
 Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany RALF BORNDÖRFER STEFFEN WEIDER ANDREAS LÖBEL Integrierte Umlauf- und Dienstplanung im Nahverkehr ZIB-Report
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany RALF BORNDÖRFER STEFFEN WEIDER ANDREAS LÖBEL Integrierte Umlauf- und Dienstplanung im Nahverkehr ZIB-Report
Optimierung. Optimierung. Vorlesung 8 Lineare Programmierung III: Simplex Algorithmus Fabian Kuhn
 Optimierung Vorlesung 8 Lineare Programmierung III: Simplex Algorithmus 1 Resource Allocation Beispiel aus Vorlesung 6 Primales LP: Duales LP: max 3 4 2 2 4 2 8 3 6 0, 0, 0 min 4 8 6 2 3 3 4 2 2 0, 0,
Optimierung Vorlesung 8 Lineare Programmierung III: Simplex Algorithmus 1 Resource Allocation Beispiel aus Vorlesung 6 Primales LP: Duales LP: max 3 4 2 2 4 2 8 3 6 0, 0, 0 min 4 8 6 2 3 3 4 2 2 0, 0,
Kombinatorische Optimierung
 Kombinatorische Optimierung Juniorprof. Dr. Henning Meyerhenke PARALLELES RECHNEN INSTITUT FÜR THEORETISCHE INFORMATIK, FAKULTÄT FÜR INFORMATIK KIT Universität des Landes Baden-Württemberg und nationales
Kombinatorische Optimierung Juniorprof. Dr. Henning Meyerhenke PARALLELES RECHNEN INSTITUT FÜR THEORETISCHE INFORMATIK, FAKULTÄT FÜR INFORMATIK KIT Universität des Landes Baden-Württemberg und nationales
Kap. 5: Graph Coloring
 Kap. 5: Graph Coloring Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 10./11. VO 18.12.06 / 8.1.07 Überblick 5.1 Einführung Definition und Motivation Sudoku 5.2 ILP-Formulierungen
Kap. 5: Graph Coloring Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS11 10./11. VO 18.12.06 / 8.1.07 Überblick 5.1 Einführung Definition und Motivation Sudoku 5.2 ILP-Formulierungen
Inhaltsübersicht für heute:
 Inhaltsübersicht für heute: Dualität Anwendung: Spieltheorie Komplementarität und Sensitivitätsanalyse Spaltengenerierung Schnittebenenverfahren Welchen Simplex wann? Inhaltsübersicht für heute: Dualität
Inhaltsübersicht für heute: Dualität Anwendung: Spieltheorie Komplementarität und Sensitivitätsanalyse Spaltengenerierung Schnittebenenverfahren Welchen Simplex wann? Inhaltsübersicht für heute: Dualität
Innere-Punkt-Methoden
 Innere-Punkt-Methoden Johannes Stemick 26.01.2010 Johannes Stemick () Innere-Punkt-Methoden 26.01.2010 1 / 28 Übersicht 1 Lineare Optimierung 2 Innere-Punkt-Methoden Path-following methods Potential reduction
Innere-Punkt-Methoden Johannes Stemick 26.01.2010 Johannes Stemick () Innere-Punkt-Methoden 26.01.2010 1 / 28 Übersicht 1 Lineare Optimierung 2 Innere-Punkt-Methoden Path-following methods Potential reduction
Kapitel 4. Optimierungsalgorithmen. Technische Universität Wien. Gunnar Klau Technische Universität Wien. Institut für Computergraphik und Algorithmen
 Kapitel 4 Optimierungsalgorithmen Gunnar Klau Institut für Computergraphik und Algorithmen 1 Gliederung Kombinatorische vs. Ganzzahlige Optimierung Exakte Verfahren Branch-and-Bound Schnittebenenverfahren
Kapitel 4 Optimierungsalgorithmen Gunnar Klau Institut für Computergraphik und Algorithmen 1 Gliederung Kombinatorische vs. Ganzzahlige Optimierung Exakte Verfahren Branch-and-Bound Schnittebenenverfahren
Ganzzahlige Optimierung (IP)
") Thema Ganzzahlige Optimierung (IP) Systematik * Problematik * Pragmatik IP und Branch and Bound 1 Agenda 1. Relevanz der Ganzzahligkeit? 2. Formulierung ganzzahliger Modelle 3. Zur Lösung ganzzahliger
Thema Ganzzahlige Optimierung (IP) Systematik * Problematik * Pragmatik IP und Branch and Bound 1 Agenda 1. Relevanz der Ganzzahligkeit? 2. Formulierung ganzzahliger Modelle 3. Zur Lösung ganzzahliger
Die Ungarische Methode für das Assignmentproblem
 Die Ungarische Methode für das Assignmentproblem Seminar: Kombinatorische Optimierung SS08, Christof Schulz 11.07.2008 Hauptquellen: The Hungarian Method for the Assignment Problem von H.W. Kuhn (1955)
Die Ungarische Methode für das Assignmentproblem Seminar: Kombinatorische Optimierung SS08, Christof Schulz 11.07.2008 Hauptquellen: The Hungarian Method for the Assignment Problem von H.W. Kuhn (1955)
Europäisches Parlament beschließt neue Lenk- und Ruhezeitregeln für Kraftfahrer
 RA Dr. Christian Schlottfeldt Europäisches Parlament beschließt neue Lenk- und Ruhezeitregeln für Kraftfahrer Das Europäische Parlament und der Europäische Rat haben sich auf die Änderung der europäischen
RA Dr. Christian Schlottfeldt Europäisches Parlament beschließt neue Lenk- und Ruhezeitregeln für Kraftfahrer Das Europäische Parlament und der Europäische Rat haben sich auf die Änderung der europäischen
Grundlagen der Optimierung. Übung 6
 Technische Universität Chemnitz Chemnitz, 2. November 24 Prof. Dr. R. Herzog, J. Blechschmidt, A. Schäfer Abgabe am 28. November 24 Grundlagen der Optimierung Übung 6 Aufgabe 2: Verschiedene Verfahren
Technische Universität Chemnitz Chemnitz, 2. November 24 Prof. Dr. R. Herzog, J. Blechschmidt, A. Schäfer Abgabe am 28. November 24 Grundlagen der Optimierung Übung 6 Aufgabe 2: Verschiedene Verfahren
Multi-Port-Speichermanager für die Java-Plattform SHAP
 Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Multi-Port-Speichermanager für die Java-Plattform SHAP DASS 2008 Martin Zabel, Peter
Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Multi-Port-Speichermanager für die Java-Plattform SHAP DASS 2008 Martin Zabel, Peter
Kap. 4.2: Simplex- Algorithmus
 Kap. 4.: Simplex- Algorithmus Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS Fakultät für Informatik, TU Dortmund Literatur für diese VO V. Chvatal: Linear Programming D. ertsimas:
Kap. 4.: Simplex- Algorithmus Professor Dr. Petra Mutzel Lehrstuhl für Algorithm Engineering, LS Fakultät für Informatik, TU Dortmund Literatur für diese VO V. Chvatal: Linear Programming D. ertsimas:
ISEA RWTH Aachen Electric Bus Simulation
 ISEA RWTH Aachen Electric Bus Simulation Finding the Optimal Technical Configuration 05.04.2017 Fabian Meishner Lehrstuhl für Elektrochemische Energiewandlung und 1 Speichersystemtechnik Electric Bus Simulation
ISEA RWTH Aachen Electric Bus Simulation Finding the Optimal Technical Configuration 05.04.2017 Fabian Meishner Lehrstuhl für Elektrochemische Energiewandlung und 1 Speichersystemtechnik Electric Bus Simulation
3. Der Algorithmus a) ohne Approximation b) mit Approximation
 ohne Approximation b) mit Approximation") Kapitel 9 Lösung von großen 0-1 Problemen mithilfe der Lagrange Relaxation - Der Wedelin Algorithmus Seminar Ganzzahlige Optimierung, WS 2006/07 Gliederung 1. Einführung 2. Das binäre ganzzahlige Problem
Kapitel 9 Lösung von großen 0-1 Problemen mithilfe der Lagrange Relaxation - Der Wedelin Algorithmus Seminar Ganzzahlige Optimierung, WS 2006/07 Gliederung 1. Einführung 2. Das binäre ganzzahlige Problem
Der Landesverband Thüringen des Verkehrsgewerbes e.v. informiert zu Veränderungen der Sozialvorschriften
 Der Landesverband Thüringen des Verkehrsgewerbes e.v. LTV informiert zu Veränderungen der Sozialvorschriften Übersicht alte und neue Lenk- und Ruhezeiten-Verordnung Bis 10. April 2007 gültig VO (EWG) Nr.
Der Landesverband Thüringen des Verkehrsgewerbes e.v. LTV informiert zu Veränderungen der Sozialvorschriften Übersicht alte und neue Lenk- und Ruhezeiten-Verordnung Bis 10. April 2007 gültig VO (EWG) Nr.
Inhalt. 8.1 Motivation. 8.2 Optimierung ohne Nebenbedingungen. 8.3 Optimierung unter Nebenbedingungen. 8.4 Lineare Programmierung
 8. Optimierung Inhalt 8.1 Motivation 8.2 Optimierung ohne Nebenbedingungen 8.3 Optimierung unter Nebenbedingungen 8.4 Lineare Programmierung 8.5 Kombinatorische Optimierung 2 8.1 Motivation Viele Anwendungen
8. Optimierung Inhalt 8.1 Motivation 8.2 Optimierung ohne Nebenbedingungen 8.3 Optimierung unter Nebenbedingungen 8.4 Lineare Programmierung 8.5 Kombinatorische Optimierung 2 8.1 Motivation Viele Anwendungen
Lineare Optimierung und ganzzahlige lineare Optimierung
 Definition 1: Problem LP: Lineare Optimierung und ganzzahlige lineare Optimierung geg.: m, n N, A Z m n, b Z m, c Z n ges.: x R n 0 mit c T x max Beispiel 1: (Gewinnmaximierung) Ax b Gerät Abteilung 1
Definition 1: Problem LP: Lineare Optimierung und ganzzahlige lineare Optimierung geg.: m, n N, A Z m n, b Z m, c Z n ges.: x R n 0 mit c T x max Beispiel 1: (Gewinnmaximierung) Ax b Gerät Abteilung 1
Lagrange-Relaxierung und Subgradientenverfahren
 Lagrange-Relaxierung und Subgradientenverfahren Wir wollen nun eine Methode vorstellen, mit der man gegebene Relaxierungen verbessern kann. Wir werden die Idee zunächst an der 1-Baum-Relaxierung des symmetrischen
Lagrange-Relaxierung und Subgradientenverfahren Wir wollen nun eine Methode vorstellen, mit der man gegebene Relaxierungen verbessern kann. Wir werden die Idee zunächst an der 1-Baum-Relaxierung des symmetrischen
1. Transport- und Zuordnungsprobleme Optimierungsalgorithmus für Transportprobleme. Duales Problem. a i u i + i=1. j=1
 1. Transport- und Zuordnungsprobleme Optimierungsalgorithmus für Transportprobleme Duales Problem Lemma 1.4. Das zum Transportproblem duale Problem lautet: max unter den Nebenbedingungen m a i u i + i=1
1. Transport- und Zuordnungsprobleme Optimierungsalgorithmus für Transportprobleme Duales Problem Lemma 1.4. Das zum Transportproblem duale Problem lautet: max unter den Nebenbedingungen m a i u i + i=1
Integrierte Dienst- und Dienstreihenfolgeplanung zur Erhöhung der Fahrerzufriedenheit
 Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany RALF BORNDÖRFER BASTIAN DITTBRENNER ANDREAS LANGENHAN STEPHAN SEIDL STEFFEN WEIDER Integrierte Dienst- und
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7 D-14195 Berlin-Dahlem Germany RALF BORNDÖRFER BASTIAN DITTBRENNER ANDREAS LANGENHAN STEPHAN SEIDL STEFFEN WEIDER Integrierte Dienst- und
Erfüllbarkeitsprobleme. Begriffe. Varianten von SAT
 Erfüllbarkeitsprobleme SAT (satisfiability problem) Eingabe: Formel F in konjunktiver Form. Frage: Gibt es eine Belegung x der Variablen in F mit F(x)=1? Beispiel: Begriffe erfüllbar satisfiable: Eigenschaft
Erfüllbarkeitsprobleme SAT (satisfiability problem) Eingabe: Formel F in konjunktiver Form. Frage: Gibt es eine Belegung x der Variablen in F mit F(x)=1? Beispiel: Begriffe erfüllbar satisfiable: Eigenschaft
Operations Research. Ganzzahlige lineare Programme. ganzzahlige lineare Programme. Ganzzahlige lineare Programme. Rainer Schrader. 25.
 Operations Research Rainer Schrader Ganzzahlige lineare Programme Zentrum für Angewandte Informatik Köln 25. Juni 2007 1 / 49 2 / 49 Ganzzahlige lineare Programme Gliederung ganzzahlige lineare Programme
Operations Research Rainer Schrader Ganzzahlige lineare Programme Zentrum für Angewandte Informatik Köln 25. Juni 2007 1 / 49 2 / 49 Ganzzahlige lineare Programme Gliederung ganzzahlige lineare Programme
Eigenschaften von LPs
 2 Lineare Programmierung Eigenschaften von LPs Eigenschaften von LPs Definition 24 Eine Menge K IR n heißt konvex gdw für je zwei Punkte Punkte x (1) K und x (2) K auch jeder Punkt mit 0 λ 1 zu K gehört
2 Lineare Programmierung Eigenschaften von LPs Eigenschaften von LPs Definition 24 Eine Menge K IR n heißt konvex gdw für je zwei Punkte Punkte x (1) K und x (2) K auch jeder Punkt mit 0 λ 1 zu K gehört
Fahrpersonalverordnung (FPersV) Abschnitt 7 Sonstige Vorschriften. 20 Nachweis über berücksichtigungsfreie Tage
 Abschnitt 7 Sonstige Vorschriften. 20 Nachweis über berücksichtigungsfreie Tage") Fahrpersonalverordnung (FPersV) Abschnitt 7 Sonstige Vorschriften 20 Nachweis über berücksichtigungsfreie Tage (1) Selbstfahrende Unternehmer und Fahrer, die die in Artikel 15 Abs. 7 der Verordnung (EWG)
Fahrpersonalverordnung (FPersV) Abschnitt 7 Sonstige Vorschriften 20 Nachweis über berücksichtigungsfreie Tage (1) Selbstfahrende Unternehmer und Fahrer, die die in Artikel 15 Abs. 7 der Verordnung (EWG)
Lineare Optimierung Teil 2
 Lineare Optimierung Teil 2 Primale Degeneration Duale Degeneration = Mehrdeutigkeit Normalform kanonische Form Duale Simplexmethode HTW-Berlin FB3 Prof. Dr.F. Hartl 1 Primale Degeneration/1 Besitzt eine
Lineare Optimierung Teil 2 Primale Degeneration Duale Degeneration = Mehrdeutigkeit Normalform kanonische Form Duale Simplexmethode HTW-Berlin FB3 Prof. Dr.F. Hartl 1 Primale Degeneration/1 Besitzt eine
Substitutionsverfahren vs. Lagrange-Methode
 Substitutionsverfahren vs. Lagrange-Methode 1 Motivation Substitutionsverfahren und Lagrange-Methode sind Verfahren, die es ermöglichen, Optimierungen unter Nebenbedingungen durchzuführen. Die folgende
Substitutionsverfahren vs. Lagrange-Methode 1 Motivation Substitutionsverfahren und Lagrange-Methode sind Verfahren, die es ermöglichen, Optimierungen unter Nebenbedingungen durchzuführen. Die folgende
Atline Inspection of Casting Production Process at Volkswagen using VG Inline
 Atline Inspection of Casting Production Process at Volkswagen using VG Inline Atline Inspection of Casting Production Process at Volkswagen using VG Inline Authors: Dr.-Ing. Raimund Rösch, Frank Jeltsch
Atline Inspection of Casting Production Process at Volkswagen using VG Inline Atline Inspection of Casting Production Process at Volkswagen using VG Inline Authors: Dr.-Ing. Raimund Rösch, Frank Jeltsch
11. Übung zu Algorithmen I 6. Juli 2016
 11. Übung zu Algorithmen I 6. Juli 2016 Lisa Kohl lisa.kohl@kit.edu mit Folien von Lukas Barth Roadmap Ausblick: Was sind schwierige Probleme? Travelling Salesman Problem - Reprise ein ILP ein Algorithmus
11. Übung zu Algorithmen I 6. Juli 2016 Lisa Kohl lisa.kohl@kit.edu mit Folien von Lukas Barth Roadmap Ausblick: Was sind schwierige Probleme? Travelling Salesman Problem - Reprise ein ILP ein Algorithmus
Optimierung I. Dr. Ulf Lorenz F2.413
 Optimierung I Dr. Ulf Lorenz F2.413 flulo@upb.de Organisation Dozent: Dr. Ulf Lorenz F2.413 Fürstenallee 11 email: flulo@upb.de WWW: http://www.upb.de/cs/flulo (hier auch aktuelle Infos + Ü-Zettel) Vorlesungen:
Optimierung I Dr. Ulf Lorenz F2.413 flulo@upb.de Organisation Dozent: Dr. Ulf Lorenz F2.413 Fürstenallee 11 email: flulo@upb.de WWW: http://www.upb.de/cs/flulo (hier auch aktuelle Infos + Ü-Zettel) Vorlesungen:
10.2 Dualitätstheorie Operations Research. In der Standardform eines Maximierungsproblem: b e ) mit ( w) + a ej ) x j + x g = ( b g + g G
 mit ( w) + a ej ) x j + x g = ( b g + g G") 48 0 Operations Research In der Standardform eines Maximierungsproblem: Max ( w) mit ( w) + u. d. N. z + x l + n ( a gj + j= g G e E n d j x j = z 0 j= n a l j x j = b l für alle l L j= x g n + a gj x
48 0 Operations Research In der Standardform eines Maximierungsproblem: Max ( w) mit ( w) + u. d. N. z + x l + n ( a gj + j= g G e E n d j x j = z 0 j= n a l j x j = b l für alle l L j= x g n + a gj x
3. Grundlagen der Linearen Programmierung
 3. Grundlagen der linearen Programmierung Inhalt 3. Grundlagen der Linearen Programmierung Lineares Programm Grafische Lösung linearer Programme Normalform Geometrie linearer Programme Basislösungen Operations
3. Grundlagen der linearen Programmierung Inhalt 3. Grundlagen der Linearen Programmierung Lineares Programm Grafische Lösung linearer Programme Normalform Geometrie linearer Programme Basislösungen Operations
Studientag zur Algorithmischen Mathematik
 Studientag zur Algorithmischen Mathematik Lineare Optimierung Winfried Hochstättler Diskrete Mathematik und Optimierung FernUniversität in Hagen 1. Juli 2012 Outline Lineares Programm (LP) in Standardform
Studientag zur Algorithmischen Mathematik Lineare Optimierung Winfried Hochstättler Diskrete Mathematik und Optimierung FernUniversität in Hagen 1. Juli 2012 Outline Lineares Programm (LP) in Standardform
3.2.5 Dualität der linearen Optimierung I
 3..5 Dualität der linearen Optimierung I Jedem linearen Programm in Standardform kann ein sogenanntes duales Programm zugeordnet werden. Es entsteht dadurch, daß man von einem Minimierungsproblem zu einem
3..5 Dualität der linearen Optimierung I Jedem linearen Programm in Standardform kann ein sogenanntes duales Programm zugeordnet werden. Es entsteht dadurch, daß man von einem Minimierungsproblem zu einem
Aufgabensammlung uncf Klausurentrainer zur Optimierung
 Karl Heinz Borgwardt unter Mitarbeit von Matthias Tinkl und Thomas Wörle Aufgabensammlung uncf Klausurentrainer zur Optimierung Für die Bachelorausbildung in mathematischen Studiengängen STUDIUM 11 VIEWEG+
Karl Heinz Borgwardt unter Mitarbeit von Matthias Tinkl und Thomas Wörle Aufgabensammlung uncf Klausurentrainer zur Optimierung Für die Bachelorausbildung in mathematischen Studiengängen STUDIUM 11 VIEWEG+
Newton-Verfahren zur gleichungsbeschränkten Optimierung. 1 Gleichungsbeschränkte Optimierungsprobleme
 Newton-Verfahren zur gleichungsbeschränkten Optimierung Armin Farmani Anosheh (afarmani@mail.uni-mannheim.de) 3.Mai 2016 1 Gleichungsbeschränkte Optimierungsprobleme Einleitung In diesem Vortrag geht es
Newton-Verfahren zur gleichungsbeschränkten Optimierung Armin Farmani Anosheh (afarmani@mail.uni-mannheim.de) 3.Mai 2016 1 Gleichungsbeschränkte Optimierungsprobleme Einleitung In diesem Vortrag geht es
Lineare Optimierung Ergänzungskurs
 Lineare Optimierung Ergänzungskurs Wintersemester 2015/16 Julia Lange, M.Sc. Literatur Werner, F.; Sotskov, Y.N. (2006): Mathematics of Economics and Business; Routledge; London Bemerkungen Diese Unterlagen
Lineare Optimierung Ergänzungskurs Wintersemester 2015/16 Julia Lange, M.Sc. Literatur Werner, F.; Sotskov, Y.N. (2006): Mathematics of Economics and Business; Routledge; London Bemerkungen Diese Unterlagen
Seminar VSP Stephan Müller Makroskopische Verkehrsmodellierung mit der Einflussgröße Telematik. Stephan Müller
 www.dlr.de Folie 1 Seminar VSP Stephan Müller 07.6.2012 Makroskopische Verkehrsmodellierung mit der Einflussgröße Telematik Stephan Müller www.dlr.de Folie 2 Seminar VSP Stephan Müller 07.6.2012 Inhalt
www.dlr.de Folie 1 Seminar VSP Stephan Müller 07.6.2012 Makroskopische Verkehrsmodellierung mit der Einflussgröße Telematik Stephan Müller www.dlr.de Folie 2 Seminar VSP Stephan Müller 07.6.2012 Inhalt
Grundlagen der Künstlichen Intelligenz
 Grundlagen der Künstlichen Intelligenz 23. Constraint-Satisfaction-Probleme: Pfadkonsistenz Malte Helmert Universität Basel 14. April 2014 Constraint-Satisfaction-Probleme: Überblick Kapitelüberblick Constraint-Satisfaction-Probleme:
Grundlagen der Künstlichen Intelligenz 23. Constraint-Satisfaction-Probleme: Pfadkonsistenz Malte Helmert Universität Basel 14. April 2014 Constraint-Satisfaction-Probleme: Überblick Kapitelüberblick Constraint-Satisfaction-Probleme:
1 Der Simplex Algorithmus I
 1 Nicoletta Andri 1 Der Simplex Algorithmus I 1.1 Einführungsbeispiel In einer Papiermühle wird aus Altpapier und anderen Vorstoffen feines und grobes Papier hergestellt. Der Erlös pro Tonne feines Papier
1 Nicoletta Andri 1 Der Simplex Algorithmus I 1.1 Einführungsbeispiel In einer Papiermühle wird aus Altpapier und anderen Vorstoffen feines und grobes Papier hergestellt. Der Erlös pro Tonne feines Papier
Integer Convex Minimization in Low Dimensions
 DISS. ETH NO. 22288 Integer Convex Minimization in Low Dimensions A thesis submitted to attain the degree of DOCTOR OF SCIENCES of ETH ZURICH (Dr. sc. ETH Zurich) presented by TIMM OERTEL Diplom-Mathematiker,
DISS. ETH NO. 22288 Integer Convex Minimization in Low Dimensions A thesis submitted to attain the degree of DOCTOR OF SCIENCES of ETH ZURICH (Dr. sc. ETH Zurich) presented by TIMM OERTEL Diplom-Mathematiker,
Kapitel 4. Mathematische Optimierungsmodelle. Einführung in AMPL (1) Uwe H. Suhl Lehrstuhl für Wirtschaftsinformatik Freie Universität Berlin
 Uwe H. Suhl Lehrstuhl für Wirtschaftsinformatik Freie Universität Berlin") Kapitel 4 Mathematische Optimierungsmodelle Einführung in AMPL () Uwe H. Suhl Lehrstuhl für Wirtschaftsinformatik Freie Universität Berlin Optimierungssysteme Version. / SS 200 Modellierungssysteme Sind
Kapitel 4 Mathematische Optimierungsmodelle Einführung in AMPL () Uwe H. Suhl Lehrstuhl für Wirtschaftsinformatik Freie Universität Berlin Optimierungssysteme Version. / SS 200 Modellierungssysteme Sind
Diskrete Optimierungsverfahren zur Lösung von Sudokus
 Diskrete Optimierungsverfahren zur Lösung von Sudokus Seminarvortrag von Daniel Scholz am 6. Dezember 2006 Am Beispiel der Lösung von Sudokurätseln mit Hilfe der linearen Optimierung werden verschiedenen
Diskrete Optimierungsverfahren zur Lösung von Sudokus Seminarvortrag von Daniel Scholz am 6. Dezember 2006 Am Beispiel der Lösung von Sudokurätseln mit Hilfe der linearen Optimierung werden verschiedenen
Der Begriff Tag im Sinne der Verordnungen. EuGH, Urteil vom C-394/ 92
 EuGH, Urteil vom 09.06.1994 - C-394/ 92 Leitsätze 1. Die tägliche Arbeitszeit im Sinne des Artikels 15 Absatz 2 der Verordnung Nr. 3821/85 über das Kontrollgerät im Strassenverkehr umfasst die Lenkzeit,
EuGH, Urteil vom 09.06.1994 - C-394/ 92 Leitsätze 1. Die tägliche Arbeitszeit im Sinne des Artikels 15 Absatz 2 der Verordnung Nr. 3821/85 über das Kontrollgerät im Strassenverkehr umfasst die Lenkzeit,
Telebus Berlin - Mobilität für Behinderte
 Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7, D-14195 Berlin-Dahlem, Germany Ralf Borndörfer Fridolin Klostermeier Martin Grötschel Christian K üttner Telebus Berlin - Mobilität für
Konrad-Zuse-Zentrum für Informationstechnik Berlin Takustraße 7, D-14195 Berlin-Dahlem, Germany Ralf Borndörfer Fridolin Klostermeier Martin Grötschel Christian K üttner Telebus Berlin - Mobilität für
Motivation. Problemstellung. Lösungsansätze. Fazit und Ausblick. Dipl. Wi.-Inf. Thomas Huth. Problemstellung. Lösungsansätze. Fazit und Ausblick
 Dynamische Aspekte in der mehrperiodischen Tourenplanung Doktorandenkolloquium Sonnenberg, März M 2007 1 Motivation Dynamische Aspekte in der Tourenplanung werden zunehmend wichtiger Gründe dafür sind
Dynamische Aspekte in der mehrperiodischen Tourenplanung Doktorandenkolloquium Sonnenberg, März M 2007 1 Motivation Dynamische Aspekte in der Tourenplanung werden zunehmend wichtiger Gründe dafür sind
Algorithmische Geometrie Thema: Konvexe Hüllen
 Algorithmische Geometrie Thema: Konvexe Hüllen Christoph Hermes Hermes@hausmilbe.de 17. Juni 2003 Ausblick auf den Vortrag 1/32 1 Was sind konvexe Hüllen? Wozu braucht man sie? Wie kann man sie berechnen
Algorithmische Geometrie Thema: Konvexe Hüllen Christoph Hermes Hermes@hausmilbe.de 17. Juni 2003 Ausblick auf den Vortrag 1/32 1 Was sind konvexe Hüllen? Wozu braucht man sie? Wie kann man sie berechnen
SOZIALVORSCHRIFTEN IM STRAßENVERKEHR Verordnung (EG) Nr. 561/2006, Richtlinie 2006/22/EG, Verordnung (EU) Nr. 165/2014
 Nr. 561/2006, Richtlinie 2006/22/EG, Verordnung (EU) Nr. 165/2014") LEITLINIE NR. 7 Gegenstand: Die Bedeutung von innerhalb von 24 Stunden Artikel: 8 Absätze 2 und 5 der Verordnung (EG) Nr. 561/2006 Leitlinien: Nach Artikel 8 Absatz 2 der Verordnung muss innerhalb von
LEITLINIE NR. 7 Gegenstand: Die Bedeutung von innerhalb von 24 Stunden Artikel: 8 Absätze 2 und 5 der Verordnung (EG) Nr. 561/2006 Leitlinien: Nach Artikel 8 Absatz 2 der Verordnung muss innerhalb von
Die Ungarische Methode für das Assignment Problem von H. W. Kuhn (1955)
") Die Ungarische Methode für das Assignment Problem von H. W. Kuhn (1955) Seminar Kombinatorische Optimierung SS08: Christof Schulz 11.07.2008 1 Harold William Kuhn 2 Das Assignmentproblem Einfaches Assignmentproblem
Die Ungarische Methode für das Assignment Problem von H. W. Kuhn (1955) Seminar Kombinatorische Optimierung SS08: Christof Schulz 11.07.2008 1 Harold William Kuhn 2 Das Assignmentproblem Einfaches Assignmentproblem
FEM Isoparametric Concept
 FEM Isoparametric Concept home/lehre/vl-mhs--e/folien/vorlesung/4_fem_isopara/cover_sheet.tex page of 25. p./25 Table of contents. Interpolation Functions for the Finite Elements 2. Finite Element Types
FEM Isoparametric Concept home/lehre/vl-mhs--e/folien/vorlesung/4_fem_isopara/cover_sheet.tex page of 25. p./25 Table of contents. Interpolation Functions for the Finite Elements 2. Finite Element Types
Automatiche Teameinteilung für PSE
 Automatiche Teameinteilung für PSE Einführung ILP-Modellierung LEHRSTUHL PROGRAMMIERPARADIGMEN 0 7.12.2016 - PSE/TSE WS 2016/17 KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft LEHRSTUHL PROGRAMMIERPARADIGMEN
Automatiche Teameinteilung für PSE Einführung ILP-Modellierung LEHRSTUHL PROGRAMMIERPARADIGMEN 0 7.12.2016 - PSE/TSE WS 2016/17 KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft LEHRSTUHL PROGRAMMIERPARADIGMEN
Kapitel 9: Lineare Programmierung Gliederung
 Gliederung 1. Grundlagen 2. Zahlentheoretische Algorithmen 3. Sortierverfahren 4. Ausgewählte Datenstrukturen 5. Dynamisches Programmieren 6. Graphalgorithmen 7. String-Matching 8. Kombinatorische Algorithmen
Gliederung 1. Grundlagen 2. Zahlentheoretische Algorithmen 3. Sortierverfahren 4. Ausgewählte Datenstrukturen 5. Dynamisches Programmieren 6. Graphalgorithmen 7. String-Matching 8. Kombinatorische Algorithmen
Cilk Sprache für Parallelprogrammierung. IPD Snelting, Lehrstuhl für Programmierparadigmen
 Cilk Sprache für Parallelprogrammierung IPD Snelting, Lehrstuhl für Programmierparadigmen David Soria Parra Geschichte Geschichte Entwickelt 1994 am MIT Laboratory for Computer Science Cilk 1: Continuations
Cilk Sprache für Parallelprogrammierung IPD Snelting, Lehrstuhl für Programmierparadigmen David Soria Parra Geschichte Geschichte Entwickelt 1994 am MIT Laboratory for Computer Science Cilk 1: Continuations
Lineare Optimierungsmodelle
 Lineare Optimierungsmodelle Simplex-Methode Vortragender: Michael Schneider Agenda Motivation Operations Research Aufbau linearer Optimierungsmodelle Simplex-Methode Ausblick 2 Problemstellung Futtermischung
Lineare Optimierungsmodelle Simplex-Methode Vortragender: Michael Schneider Agenda Motivation Operations Research Aufbau linearer Optimierungsmodelle Simplex-Methode Ausblick 2 Problemstellung Futtermischung
KOLLEKTIVVERTRAG. betreffend die arbeitszeitrechtlichen Bestimmungen für Lenker von Kraftfahrzeugen
 KOLLEKTIVVERTRAG betreffend die arbeitszeitrechtlichen Bestimmungen für Lenker von Kraftfahrzeugen abgeschlossen zwischen dem Fachverband der Nahrungs- und Genußmittelindustrie Österreichs, 1030 Wien,
KOLLEKTIVVERTRAG betreffend die arbeitszeitrechtlichen Bestimmungen für Lenker von Kraftfahrzeugen abgeschlossen zwischen dem Fachverband der Nahrungs- und Genußmittelindustrie Österreichs, 1030 Wien,
A1 Artikel 5 Absatz 1 Nichteinhaltung des Mindestalters für Schaffner X. B3 11 Std. X. B7 12 Std. X
 19.3.2016 L 74/23 ANHANG III Anhang III der Richtlinie 2006/22/EG erhält folgende Fassung: ANHANG III 1. Gruppen von Verstößen gegen die Verordnung (EG) 561/2006 ( 1 ) A Fahrpersonal A1 Artikel 5 Nichteinhaltung
19.3.2016 L 74/23 ANHANG III Anhang III der Richtlinie 2006/22/EG erhält folgende Fassung: ANHANG III 1. Gruppen von Verstößen gegen die Verordnung (EG) 561/2006 ( 1 ) A Fahrpersonal A1 Artikel 5 Nichteinhaltung
Die duale Simplexmethode zur Lösung rein ganzzahliger linearer Programme
 Kapitel 11 Die duale Simplexmethode zur Lösung rein ganzzahliger linearer Programme Wir betrachten folgendes Optimierungsproblem z = c T x min! Ax = b (11.1) (11.2) x j ganz für j = 1,..., n 1 n, (11.3)
Kapitel 11 Die duale Simplexmethode zur Lösung rein ganzzahliger linearer Programme Wir betrachten folgendes Optimierungsproblem z = c T x min! Ax = b (11.1) (11.2) x j ganz für j = 1,..., n 1 n, (11.3)
VORLESUNG 11 Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt)
") VORLESUNG Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 3 Wiederholung! Lineare Programme häufig geeignete Modellierung von Optimierungsproblemen! Verschiedene Darstellungen sind
VORLESUNG Lineare Optimierung (Viele Folien nach Ulf Lorenz, jetzt TU Darmstadt) 3 Wiederholung! Lineare Programme häufig geeignete Modellierung von Optimierungsproblemen! Verschiedene Darstellungen sind
Gemischt-ganzzahlige Optimierung: Modellierung in der Praxis
 Josef Kallrath Gemischt-ganzzahlige Optimierung: Modellierung in der Praxis Mit Fallstudien aus Chemie, Energiewirtschaft Papierindustrie, Metallgewerbe, Produktion und Logistik 2., überarbeitete und erweiterte
Josef Kallrath Gemischt-ganzzahlige Optimierung: Modellierung in der Praxis Mit Fallstudien aus Chemie, Energiewirtschaft Papierindustrie, Metallgewerbe, Produktion und Logistik 2., überarbeitete und erweiterte
Leibniz Universität Hannover Wirtschaftswissenschaftliche Fakultät Institut für Produktionswirtschaft Prof. Dr. Stefan Helber
 Leibniz Universität Hannover Wirtschaftswissenschaftliche Fakultät Institut für Produktionswirtschaft Prof. Dr. Stefan Helber Sitzplatznr.: Wiederholungsklausur zur Vorlesung Operations Research im Wintersemester
Leibniz Universität Hannover Wirtschaftswissenschaftliche Fakultät Institut für Produktionswirtschaft Prof. Dr. Stefan Helber Sitzplatznr.: Wiederholungsklausur zur Vorlesung Operations Research im Wintersemester
Algorithmik WS 07/ Vorlesung, Andreas Jakoby Universität zu Lübeck
 Lemma 15 KLP 1 ist genau dann lösbar, wenn das dazugehörige LP KLP 2 eine Lösung mit dem Wert Z = 0 besitzt. Ist Z = 0 für x 0, x 0, dann ist x eine zulässige Lösung von KLP 1. Beweis von Lemma 15: Nach
Lemma 15 KLP 1 ist genau dann lösbar, wenn das dazugehörige LP KLP 2 eine Lösung mit dem Wert Z = 0 besitzt. Ist Z = 0 für x 0, x 0, dann ist x eine zulässige Lösung von KLP 1. Beweis von Lemma 15: Nach
Modellieren mit AMPL
 Modellieren mit AMPL Elisabeth Gassner Mathematische Modelle in den Wirtschaftswissenschaften Prof. R. E. Burkard 27. April 2007 E. Gassner (Mathematische Modelle) AMPL 27. April 2007 1 / 21 Überblick
Modellieren mit AMPL Elisabeth Gassner Mathematische Modelle in den Wirtschaftswissenschaften Prof. R. E. Burkard 27. April 2007 E. Gassner (Mathematische Modelle) AMPL 27. April 2007 1 / 21 Überblick
1 Lineare Optimierung, Simplex-Verfahren
 1 Lineare Optimierung, Simplex-Verfahren 1.1 Einführung Beispiel: In einer Fabrik werden n Produkte A 1, A 2,..., A n hergestellt. Dazu werden m Rohstoffe B 1, B 2,..., B m (inklusive Arbeitskräfte und
1 Lineare Optimierung, Simplex-Verfahren 1.1 Einführung Beispiel: In einer Fabrik werden n Produkte A 1, A 2,..., A n hergestellt. Dazu werden m Rohstoffe B 1, B 2,..., B m (inklusive Arbeitskräfte und
3.2 Lineare Optimierung (Entscheidungen unter Sicherheit)
") 3. Lineare Optimierung (Entscheidungen unter Sicherheit) Betrachtet wird hier der Fall Θ = (bzw. die Situation u(a, ϑ) bzw. l(a,ϑ) konstant in ϑ Θ für alle a A). Da hier keine Unsicherheit über die Umweltzustände
3. Lineare Optimierung (Entscheidungen unter Sicherheit) Betrachtet wird hier der Fall Θ = (bzw. die Situation u(a, ϑ) bzw. l(a,ϑ) konstant in ϑ Θ für alle a A). Da hier keine Unsicherheit über die Umweltzustände
Hybrid Optimization Methods for Warehouse Logistics and the Reconstruction of Destroyed Paper Documents
 Hybrid Optimization Methods for Warehouse Logistics and the Reconstruction of Destroyed Paper Documents Betreut von: ao.univ.-prof. Dr. Günther R. Raidl ao.univ.-prof. Dr. Ulrich Pferschy 25. Jänner 2010
Hybrid Optimization Methods for Warehouse Logistics and the Reconstruction of Destroyed Paper Documents Betreut von: ao.univ.-prof. Dr. Günther R. Raidl ao.univ.-prof. Dr. Ulrich Pferschy 25. Jänner 2010
Aufgabe 5.3 Duale Simplexverfahren
 Aufgabe 5.3 Knut Krause Thomas Siwczyk Stefan Tittel Technische Universität Dortmund Fakultät für Informatik Algorithmen und Datenstrukturen 15. Januar 2009 Gliederung 1 Aufgabenstellung und Motivation
Aufgabe 5.3 Knut Krause Thomas Siwczyk Stefan Tittel Technische Universität Dortmund Fakultät für Informatik Algorithmen und Datenstrukturen 15. Januar 2009 Gliederung 1 Aufgabenstellung und Motivation
Unimodularität. Kapitel 1. Peter Becker (H-BRS) Operations Research II Wintersemester 2015/16 11 / 206
 Operations Research II Wintersemester 2015/16 11 / 206") Kapitel 1 Unimodularität Peter Becker (H-BRS) Operations Research II Wintersemester 2015/16 11 / 206 Inhalt 1 Unimodularität Total unimodulare Matrizen Inzidenzmatrix Optimierungsprobleme auf Graphen Peter
Kapitel 1 Unimodularität Peter Becker (H-BRS) Operations Research II Wintersemester 2015/16 11 / 206 Inhalt 1 Unimodularität Total unimodulare Matrizen Inzidenzmatrix Optimierungsprobleme auf Graphen Peter
Einführung in Operations Research
 Wolfgang Domschke Andreas Drexl Einführung in Operations Research Achte Auflage fyj Springer Inhaltsverzeichnis Vorwort Symbolverzeichnis V XIII Kapitel 1: Einführung 1 1.1 Begriff des Operations Research
Wolfgang Domschke Andreas Drexl Einführung in Operations Research Achte Auflage fyj Springer Inhaltsverzeichnis Vorwort Symbolverzeichnis V XIII Kapitel 1: Einführung 1 1.1 Begriff des Operations Research
SODA. Die Datenbank als Document Store. Rainer Willems. Master Principal Sales Consultant Oracle Deutschland B.V. & Co. KG
 SODA Die Datenbank als Document Store Rainer Willems Master Principal Sales Consultant Oracle Deutschland B.V. & Co. KG vs No Anforderungskonflikte Agile Entwicklung Häufige Schema-Änderungen Relationales
SODA Die Datenbank als Document Store Rainer Willems Master Principal Sales Consultant Oracle Deutschland B.V. & Co. KG vs No Anforderungskonflikte Agile Entwicklung Häufige Schema-Änderungen Relationales
Stochastische Optimierung von Gaskraftwerken, speichern und kontrakten unter Take-or-Pay-Nebenbedingungen
 Stochastische Optimierung von Gaskraftwerken, speichern und kontrakten unter Take-or-Pay-Nebenbedingungen Nils Löhndorf, WU Wien David Wozabal, TU München Das Problem Ressourcenbewirtschaftung unter Unsicherheit
Stochastische Optimierung von Gaskraftwerken, speichern und kontrakten unter Take-or-Pay-Nebenbedingungen Nils Löhndorf, WU Wien David Wozabal, TU München Das Problem Ressourcenbewirtschaftung unter Unsicherheit
CL I IP20. 9MX056 MDU-PWR Starter Set/Extension Set. Mounting instructions. New Installation/Neuinstallation. 9MX056 MDU-PWR Starter Set
 9MX0 MDU-PWR Starter Set/Extension Set Mounting instructions IP0 CL I a New Installation/Neuinstallation 9MX0 MDU-PWR Starter Set Page/Seite b Retrofit/Nachrüstung 9MX0 MDU-PWR Starter Set Electrical connection
9MX0 MDU-PWR Starter Set/Extension Set Mounting instructions IP0 CL I a New Installation/Neuinstallation 9MX0 MDU-PWR Starter Set Page/Seite b Retrofit/Nachrüstung 9MX0 MDU-PWR Starter Set Electrical connection
Aufgabe 7.1: Wirtschaftsplanung
 Johann Wolfgang Goethe-Universität Frankfurt am Main Lehrst.f.BWL, insb. Quant. Methoden Prof. Dr. Dietrich Ohse LPUE:SQM6 LP und Erweiterungen lpueb07_ 2003s.doc Aufgabe 7.1: Wirtschaftsplanung Eine Volkswirtschaft
Johann Wolfgang Goethe-Universität Frankfurt am Main Lehrst.f.BWL, insb. Quant. Methoden Prof. Dr. Dietrich Ohse LPUE:SQM6 LP und Erweiterungen lpueb07_ 2003s.doc Aufgabe 7.1: Wirtschaftsplanung Eine Volkswirtschaft
Memory. Jian-Jia Chen (Slides are based on Peter Marwedel) Informatik 12 TU Dortmund Germany 2014 年 11 月 12 日. technische universität dortmund
 Informatik 12 TU Dortmund Germany 2014 年 11 月 12 日. technische universität dortmund") 12 Memory Jian-Jia Chen (Slides are based on Peter Marwedel) Informatik 12 TU Dortmund Germany Springer, 2010 2014 年 11 月 12 日 These slides use Microsoft clip arts. Microsoft copyright restrictions apply.
12 Memory Jian-Jia Chen (Slides are based on Peter Marwedel) Informatik 12 TU Dortmund Germany Springer, 2010 2014 年 11 月 12 日 These slides use Microsoft clip arts. Microsoft copyright restrictions apply.
Lösung allgemeiner linearer Programme
 Lösung allgemeiner linearer Programme Bisher: Für Anwendung des Simplexalgorithmus muss eine primal oder eine dual zulässige Basislösung vorliegen. Für allgemeine lineare Programme können wir dies direkt
Lösung allgemeiner linearer Programme Bisher: Für Anwendung des Simplexalgorithmus muss eine primal oder eine dual zulässige Basislösung vorliegen. Für allgemeine lineare Programme können wir dies direkt