Methodische Ansätze für für die die agentenorientierte Softwareentwicklung im im Maschinen- und und Anlagenbau
|
|
|
- Hennie Sara Linden
- vor 6 Jahren
- Abrufe
Transkript
1 Methodiche Anätze für für die die agentenorientierte Softwareentwicklung im im Machinen- und und Anlagenbau Andrea Wannagat Fachgebiet Eingebettete e 1 ES Embedded
2 Gliederung Motiation für den Einatz on Agentenytemen in der Automatiierung Konzept für die Entwicklung eine Agentenytem zur Steigerung der Verlälichkeit Strukturierung Fehlerbetrachtung Berückichtigung on Randbedingungen Modell der Wienbai Aublick 2 Embedded

3 Motiation + Definition der Agenten Herauforderungen Eigenchaften on Multi-Agenten-en: bei der Entwicklung komplexer Automatiierungyteme Verteilte Zahlreiche und parallele offene Kontrolltrukturen und nebenläufige Teilprozee mit komplexen Autonomie Kompenation Wechelwirkungen on Aufällen zur Laufzeit Flexibilität Hoher Variable Verteilunggrad Strukturen, dynamiche der Rechneryteme Umgebung Interaktiität Dikrete Echtzeit und und Zuerläigkeit kontinuierliche Prozedynamik Harte Einatz Echtzeitbedingungen auf einer SPS Steigerung der Verfügbarkeit und Optimierung zur Laufzeit?? Quelle: Siempelkamp GmbH & Co. KG 3 Embedded
4 Definition eine Agenten und Herkunft der Anforderungen Anforderungen der Bereiche Technicher Proze Techniche Prozeautomatiierungytem phyikaliche Grenzen Grenz- Riiko unzuerläig zuerläig Arten der Anforderungen Zeit Zuerläigkeit Flexibilität geforderte Funktionalität Aktionraum Flexibilität Ein Agent it eine abgrenzbare Softwareeinheit mit einem definierten Ziel und einem orgegebenen Aktionraum, innerhalb deen der Agent handelt und Entcheidungen trifft. Ein Agent it fähig eine Umwelt zu erfaen und mit dieer zielgerichtet zu interagieren beziehungweie zu kommunizieren. nach G.Weiß und R.Jakob 4 ES Embedded
5 Methode für die Entwicklung on Agentenytemen Automatiierungtechnik Proze Techniche Automatiierungytem analye Softwaretechnik Modellbildung Fehlerbaumanalye Softwareagenten Gerichtete Graphen UML Embedded
6 Methode für die Entwicklung on Agenten Proze Tech. Architektur Strukturelle / logiche Ordnung de Randbedingungen Aufteilung nach Herkunft Zeit- und Riikoabchätzung Proze Tech. Strukturen Funktionen Einflu-- parameter Riiko Proze Fehlerchnitttellen Fehlerhafte Funktion Fehlerhalten Qualitatier Zuammenhang on Urache und Wirkung Fehlerbaum Baifehler Knoten Virtueller Knoten Qualität Modell de Automatiierungytem Funktionale Zuammenhänge der Senoren und Aktoren Graphen 6 Embedded

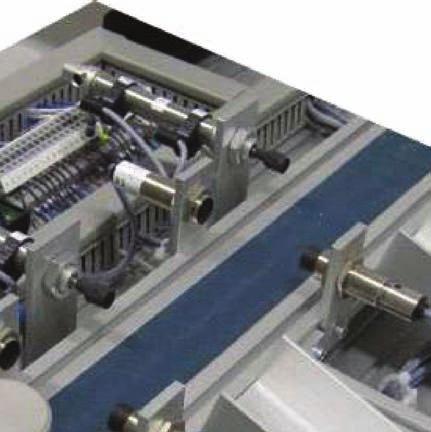



7 Beipiel I Sortiertrecke Vereinzler II 7 Band ES Vereinzler I Embedded
8 Struktur Funktion Architektur Anlage Stapel-Stempelanlage Werktücke bearbeiten Anlagenteil Sortiertrecke Sortieren Machine Sortiertation Autoßen zeitlich augedehnt mehrere nur lokale Baugruppen beteiligt Baugruppe Aktor/Senor Zylinder Aufahren zeitlich kurz Po_Senor1 Po_Senor2 Prop_Ventil Druck_Senor Kombination Aktor/Senor 8 ES Embedded
9 Architektur interne Blockdiagramm <<block>> Sortiertrecke Dient_Station : Dient Sort1 : Sortiertation Dient_zyl : Dient Vereinzler : Zylinder MeWert : boolean Endchalter_orne : Senor MeWert : boolean Endchalter_hinten : Senor Stellwert : boolean Ventil : Aktor Dient_Station : Dient Sort2 : Sortiertation Dient_zyl : Dient Vereinzler : Zylinder MeWert : boolean Endchalter_orne : Senor MeWert : boolean Endchalter_hinten : Senor Stellwert : boolean Ventil : Aktor Fetlegung on Dienten für jede Element MeWert : boolean Lichtchranke : Senor MeWert : boolean Lichtchranke : Senor MeWert : boolean Lichtchranke : Senor Interne Blockdiagramm au der SyML S1 S2 S3 d12 A2 d2 d3 d23 A2.L2 A2.L2 V 9 Embedded
10 Methode für die Entwicklung on Agenten Proze Tech. Architektur Strukturelle / logiche Ordnung de Randbedingungen Aufteilung nach Herkunft Zeit- und Riikoabchätzung Proze Tech. Strukturen Funktionen Einflu-- parameter Riiko Proze Fehlerchnitttellen Fehlerhafte Funktion Fehlerhalten Qualitatier Zuammenhang on Urache und Wirkung Fehlerbaum Baifehler Knoten Virtueller Knoten Qualität Modell de Automatiierungytem Funktionale Zuammenhänge der Senoren und Aktoren Graphen 10 Embedded
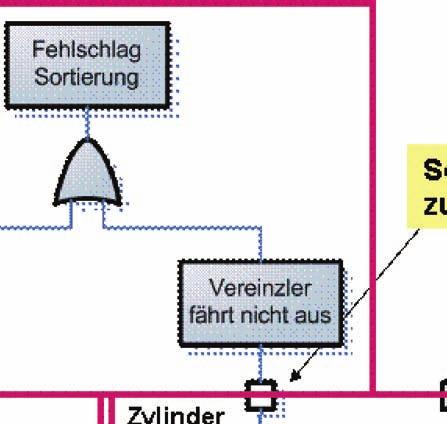




11 11 ES Fehlerbaum kombiniert mit der Elementtruktur Embedded
12 Schnitttellen zur Fehlerübermittlung «Schnitttelle» Betriebarten +Automatik() : bool +Handbetrieb () : bool +Au() : bool +Fehler () : bool Zylinder -Endlage _orne : Senor -Endlage _hinten : Senor -Ventil_orne : Aktor -Ventil_hinten : Aktor «Schnitttelle» Diente +aufahren () : bool +einfahren () : bool «Schnitttelle» OUT FK Senor +defekt() : bool Senor -Mewert : bool 2 «Schnitttelle» OUT FK Aktor +defekt() : bool Aktor -Mewert : bool «Schnitttelle» IN FK Zylinder +Endl_orne_defekt() : bool +Endl_hinten_defekt() : bool +Ventil_orne_defekt() : bool +Ventil_hinten_defekt() : bool 1 FK Zylinder «Schnitttelle» OUT FK Zylinder +fährt_nicht_au() : bool +fährt_nicht_ein() : bool 12 Embedded
13 Methode für die Entwicklung on Agenten Proze Tech. Architektur Strukturelle / logiche Ordnung de Randbedingungen Aufteilung nach Herkunft Zeit- und Riikoabchätzung Proze Tech. Strukturen Funktionen Einflu-- parameter Riiko Proze Fehlerchnitttellen Fehlerhafte Funktion Fehlerhalten Qualitatier Zuammenhang on Urache und Wirkung Fehlerbaum Baifehler Knoten Virtueller Knoten Qualität Modell de Automatiierungytem Funktionale Zuammenhänge der Senoren und Aktoren Graphen 13 Embedded
14 Wienbai Gerichteter Graph f(s2,t) f(s4,s5) f(s5,t) q Senor2 Q Q q Q Senor1 Senor5 f(s1,t) q q f(s3,t) f(s3,t) q f(s2,t) q Aktor1 Q Senor3 Q f(s4,s2) f(s1,s3,t) q Senor4 Q S i : realer Senorwert A i : realer Aktorwert (Vorgabe) Q: aktuelle Qualität de Wert q: Qualitäterlut durch die Berechnung t: Zeiterzug, der durch die Anordnung der Senoren, Signallaufzeiten oder aufgrund der Senor/Aktor Gechwindigkeit reultiert Si= f(sj,t): Funktion, um den Senorwert Si au Sj zu berechnen. Modellbaierte Erkennung on Fehlern und Berechnung on Eratzwerten 14 Embedded
15 Methode für die Entwicklung on Agenten Proze Tech. Architektur Strukturelle / logiche Ordnung de Randbedingungen Aufteilung nach Herkunft Zeit- und Riikoabchätzung Proze Tech. Strukturen Funktionen Einflu-- parameter Riiko Proze Fehlerchnitttellen Fehlerhafte Funktion Fehlerhalten Qualitatier Zuammenhang on Urache und Wirkung Fehlerbaum Baifehler Knoten Virtueller Knoten Qualität Modell de Automatiierungytem Funktionale Zuammenhänge der Senoren und Aktoren Graphen 15 Embedded

16 Sortiertrecke Vereinzler II Vereinzler I Band 16 Embedded
17 Wahrcheinlichkeit Toleranzbereich für Einatz Eratzenor Zeit LS1 LS2 LS3 100mm Fehler bzw. Abweichung Δ mm 100mm 3 50mm Strecke Δ ge = n. = Δ Δ Erf. Band Band + Δ Reakt. + Δ Poition optimal dkolben=10mm Strecke V Band Band, it Erf, it Reakt,it mm mm = 40 ± 1 = mm ± 0mm = Erkennungpegel Dicke de Lichttrahl ( 10m ± 2m) Band A/D Wandlung Bulaufzeit Zykluzeit SPS Abchätzung zur Laufzeit Kann da Autoßen icher gewährleitet werden? Aktuelle Schwankung der Gechwindigkeit einbeziehen (Prozedaten) Abhilfe: Band im Bereich de Kolben langamer betreiben. 17 Embedded
18 Toleranzbereich für Einatz Eratzenor LS3 d Kolben = 10mm Band Erf. Reakt. + Δ + Δ + Δ Band Erf. Reakt. mm mm = 40 ± 1 = 5mm ± 0mm = ( 10m ± 2m) Band, it 5mm Δ ge,max Maximal zuläige Abweichung: d Kolben Δge,max = Δ 2 ge 3 Abweichung im fehlerfreien Fall: Δ Δ ge ge ( = ( = Abweichung Senor3 defekt: 3 3 ) = Δ + 23 Erf. ΔBand + ΔtReakt. ( Band + ΔBand ) Δ Band Reakt ) = 5,08mm Δ Strecke = 1,33mm 18 Embedded
19 Verminderung der Bandgechwindigkeit in der Autoßzone LS3 Band Zone Band < < 3 Kolben Banddicke Kolben Banddicke Embedded Zone Kolben d Kolben = 10mm 5mm Δ ge,max Δ Zone ge > < Band Banddicke Kolben Δ_ge 1,3 5,03 1,67 [mm] Bandbreite Autoßzone 7,4-0,06 6,67 [mm/] _Kolben _Band_max 44,4-0,36 40 Band, it ( )/ 2 Rutche Zone Erf, it Reakt,it mm mm = 40 ± 1 = 5mm ± 0mm = ( 10m ± 2m) Band, it Anhalten de Bande reicht chon nicht mehr au. Soll da Band nicht in der Gechwindigkeit erringert werden, darf der Geamtfehler nicht überchreiten. Δ < 1,67mm 19
20 Toleranzbereich für Einatz Eratzenor P() [%] 95,5% LS3 d Kolben = 10mm 30% 95,2% 3 5mm Δ ge,max d Kolben Δge,max = Δ 2 ge Band, it Erf, it Reakt,it mm mm = 40 ± 1 = 5mm ± 0mm = Band [mm/] ( 10m ± 2m) Band, it Reduktion der Bandgechwindigkeit bi zum Stilltand: P( = 0) 95,2% Band Keine Reduktion der Bandgechwindigkeit: P( = 40mm / ) 36% Band Aktor1 Q f(s1,t) q Senor1 Q f(s3,t) q f(s2,t) q Senor3 Q Senor2 Q f(s3,t) q f(s4,s2) f(s4,s f(s1,s q 20 Embedded
21 Aufwand der Implementierung P() [%] 95,5% LS3 d Kolben = 10mm 30% 95,2% 3 5mm Δ ge,max d Kolben Δge,max = Δ 2 ge Band, it Erf, it Reakt,it mm mm = 40 ± 1 = 5mm ± 0mm = Band [mm/] ( 10m ± 2m) Band, it Vor der Laufzeit: Auftellung der Formeln und Bezüge Fetlegung der Fehlerinteralle Auftellung der Funktion der Aufallwahrcheinlichkeit Zur Laufzeit: Parametrierung der Funktionen Anpaung der Fehlerinteralle Berechnung der Aufallwahrcheinlichkeit 21 Embedded
22 Einatz im Agenten Aktuelle Aufallwahrcheinlichkeit und Leitung phyikaliche Grenzen icher Grenz- Riiko unicher geforderte Steigerung der Verfügbarkeit: Aufallwahrcheinlichkeit Grenzriko Verlälichkeit Leitung Maximierung der Leitung innerhalb de Grenzriko Maximal mögliche Leitung kann al Verhandlungbai mit anderen Agenten dienen Veränderung de Grenzriiko führt direkt zu einem angepaten Verhalten. Aktionraum Funktionalität Flexibilität 22 ES Embedded
23 Aublick Ealuation der Methode an erchiedenen komplexen Applikationen Arbeiten an einer hydraulichen Pree ind bereit begonnen Weiterentwicklung zu einer allgemeinen Vorgehenweie für den Entwurf on Agentenytemen Verfeinerung de Konzepte um Aufallwahrcheinlichkeit de Geamtytem zur Laufzeit berechnen zu können 23 Embedded
Robotersteuerung mit online Bahnvorgabe durch Kraftsensorik und / oder Bildverarbeitung
 Roboterteuerung mit online Bahnvorgabe urch Kraftenorik un / oer Bilverarbeitung Frierich Lange Intitut für Robotik un Mechatronik, DLR Oberpfaffenhofen Gerthofen, 26. Januar 2005 1. Einleitung: Aufgabe,
Roboterteuerung mit online Bahnvorgabe urch Kraftenorik un / oer Bilverarbeitung Frierich Lange Intitut für Robotik un Mechatronik, DLR Oberpfaffenhofen Gerthofen, 26. Januar 2005 1. Einleitung: Aufgabe,
Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. M. Weyrich PRÜFUNG AUTOMATISIERUNGSTECHNIK II WS 2013 / 2014
 Univerität Stuttgart Intitut für Automatiierung- und Softwaretechnik Prof. Dr.-Ing. M. Weyrich PRÜFUNG AUTOMATISIERUNGSTECHNIK II WS 23 / 24 Vorname: Name: Matrikelnummer: Prüfungtag: 6.3.24 Prüfungdauer:
Univerität Stuttgart Intitut für Automatiierung- und Softwaretechnik Prof. Dr.-Ing. M. Weyrich PRÜFUNG AUTOMATISIERUNGSTECHNIK II WS 23 / 24 Vorname: Name: Matrikelnummer: Prüfungtag: 6.3.24 Prüfungdauer:
Marktdaten-Management zwischen Anspruch und Realität. Lars Zimmer, Geschäftsführer - dacoma GmbH
 Marktdaten-Management zwichen Anpruch und Realität Lar Zimmer, Gechäftführer - dacoma GmbH Marktdaten-Management Zwichen Anpruch und Realität Lar Zimmer Gründer und Gechäftführer dacoma GmbH Gründung 1999
Marktdaten-Management zwichen Anpruch und Realität Lar Zimmer, Gechäftführer - dacoma GmbH Marktdaten-Management Zwichen Anpruch und Realität Lar Zimmer Gründer und Gechäftführer dacoma GmbH Gründung 1999
Kassenprüfungen nach 69 Satz 2 InsO. Informationen für Insolvenzverwalter und Mitglieder von Gläubigerausschüssen
 Kaenprüfungen nach 69 Satz 2 InO Informationen für Inolvenzverwalter und Mitglieder von Gläubigerauchüen In ihrer Funktion al Überwachungorgane haben Gläubigerauchüe den Geldverkehr und -betand zu prüfen
Kaenprüfungen nach 69 Satz 2 InO Informationen für Inolvenzverwalter und Mitglieder von Gläubigerauchüen In ihrer Funktion al Überwachungorgane haben Gläubigerauchüe den Geldverkehr und -betand zu prüfen
VIBROCONTROL 6000 Compact monitor
 VIBROCONTROL 6 Compact monitor Individuelle Löungen für Ihre Überwachungaufgaben Brüel & Kjær Vibro it führender Herteller von Schwingungüberwachunggeräten und Sytemen. Unere umfangreiche Produktpalette
VIBROCONTROL 6 Compact monitor Individuelle Löungen für Ihre Überwachungaufgaben Brüel & Kjær Vibro it führender Herteller von Schwingungüberwachunggeräten und Sytemen. Unere umfangreiche Produktpalette
Agentenbasierte Systeme in der Automatisierung
 Hauptseminar Informatik» Angewandte Informatik» Technische Informationssysteme Agentenbasierte Systeme in der Automatisierung Dresden, 25. Januar 2006 Gliederung 2. Energietransportmanagement 3. Fazit
Hauptseminar Informatik» Angewandte Informatik» Technische Informationssysteme Agentenbasierte Systeme in der Automatisierung Dresden, 25. Januar 2006 Gliederung 2. Energietransportmanagement 3. Fazit
Autonome Mobile Systeme
 Autonome Mobile Syteme Teil II: Sytemtheorie für Informatiker Dr. Mohamed Oubbati Intitut für Neuroinformatik Univerität Ulm SS 2007 Warum Sytemtheorie? Informatiker werden zunehmend mit Sytemen konfrontiert,
Autonome Mobile Syteme Teil II: Sytemtheorie für Informatiker Dr. Mohamed Oubbati Intitut für Neuroinformatik Univerität Ulm SS 2007 Warum Sytemtheorie? Informatiker werden zunehmend mit Sytemen konfrontiert,
1.4! Einführung. Systemmodellierung. Methoden und Werkzeuge
 Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Einführung. Vorbemerkungen und Überblick. Die elektronischen e des Fahrzeugs. Prozesse in der Fahrzeugentwicklung im Überblick,.4 Grundlagen. Steuerungs- und regelungstechnische e (Prof. Schumacher). Diskrete
Willkommen. in der Welt der Hütten- und Walzwerks-Technologie. Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT
 Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Bestimmung der Messunsicherheit
 Betimmung der Meunicherheit 1 Arten der Meabweichungen 1.1 Grobe Abweichungen Urachen Verehen de Beobachter bei Bedienung/Ableung der Meintrumente Irrtum de Beobachter bei Protokollierung/Auwertung der
Betimmung der Meunicherheit 1 Arten der Meabweichungen 1.1 Grobe Abweichungen Urachen Verehen de Beobachter bei Bedienung/Ableung der Meintrumente Irrtum de Beobachter bei Protokollierung/Auwertung der
Protokoll: Mechanische Schwingungen
 Datum: Namen: Protokoll: Mechaniche Schwingungen 1. Definieren Sie: mechaniche Schwingung. Nennen Sie die Vorauetzungen für da Enttehen mechanicher Schwingungen. Geben Sie die phyikalichen Größen zur Bechreibung
Datum: Namen: Protokoll: Mechaniche Schwingungen 1. Definieren Sie: mechaniche Schwingung. Nennen Sie die Vorauetzungen für da Enttehen mechanicher Schwingungen. Geben Sie die phyikalichen Größen zur Bechreibung
Mathematik und angewandte Mathematik 1. HAK (1. Jahrgang) 1. AUL (1. Jahrgang) Mathematik und angewandte Mathematik 1. HLW (1.
 1. AUL (1. Jahrgang) Mathematik und angewandte Mathematik 1. HLW (1.") Unterrichtfach Lehrplan HAK: Mathematik und angewandte Mathematik 1. HAK (1. Jahrgang) 1. AUL (1. Jahrgang) Lehrplan HLW: Mathematik und angewandte Mathematik 1. HLW (1. Jahrgang) Lehrplan HTL: Mathematik
Unterrichtfach Lehrplan HAK: Mathematik und angewandte Mathematik 1. HAK (1. Jahrgang) 1. AUL (1. Jahrgang) Lehrplan HLW: Mathematik und angewandte Mathematik 1. HLW (1. Jahrgang) Lehrplan HTL: Mathematik
Einfacher loop-shaping Entwurf
 Intitut für Sytemtheorie technicher Prozee Univerität Stuttgart Prof. Dr.-Ing. F. Allgöwer 6.4.24 Regelungtechnik I Loophaping-Entwurf t http://www.it.uni-tuttgart.de/education/coure/rti/ Einfacher loop-haping
Intitut für Sytemtheorie technicher Prozee Univerität Stuttgart Prof. Dr.-Ing. F. Allgöwer 6.4.24 Regelungtechnik I Loophaping-Entwurf t http://www.it.uni-tuttgart.de/education/coure/rti/ Einfacher loop-haping
Gegeben: v 1 = 120 km h. und v 2 = 150 km h. 2. Ein Radfahrer fährt 40 s mit der gleichbleibenden Geschwindigkeit von 18 km.
 Übungen (en ohne Gewähr) ================================================================== 1. Ein Auto teigert eine Gechwindigkeit gleichmäßig von 120 km auf 150 km. h h Wie groß it die Bechleunigung
Übungen (en ohne Gewähr) ================================================================== 1. Ein Auto teigert eine Gechwindigkeit gleichmäßig von 120 km auf 150 km. h h Wie groß it die Bechleunigung
zu 6: Ausbildung eines echten Integralverhaltens
 Univerität Stuttgart ntitut für Leitungelektronik und Elektriche Antriebe Prof. Dr.-ng. J. Roth-Stielo zu 6: Aubildung eine echten ntegralverhalten Betrachtete Regelytem: Die n Eigenchaft-Parameter ind
Univerität Stuttgart ntitut für Leitungelektronik und Elektriche Antriebe Prof. Dr.-ng. J. Roth-Stielo zu 6: Aubildung eine echten ntegralverhalten Betrachtete Regelytem: Die n Eigenchaft-Parameter ind
Beispiel 1 Modellbildung und Identifikation
 Beipiel Moellbilung un Ientifikation Für eine GaFlutrecke oll ein mathematiche Moell ermittelt weren. Einganggröße er trecke it eine tellpannung u t. Auganggröße er trecke it er momentane GaFlu q. u t
Beipiel Moellbilung un Ientifikation Für eine GaFlutrecke oll ein mathematiche Moell ermittelt weren. Einganggröße er trecke it eine tellpannung u t. Auganggröße er trecke it er momentane GaFlu q. u t
Formale Systeme. Binary Decision Diagrams. Prof. Dr. Bernhard Beckert WS 2010/2011 KIT INSTITUT FÜR THEORETISCHE INFORMATIK
 Formale Systeme Prof. Dr. Bernhard Beckert WS / KIT INSTITUT FÜR THEORETISCHE INFORMATIK KIT University of the State of Baden-Württemberg and National Large-scale Research Center of the Helmholtz Association
Formale Systeme Prof. Dr. Bernhard Beckert WS / KIT INSTITUT FÜR THEORETISCHE INFORMATIK KIT University of the State of Baden-Württemberg and National Large-scale Research Center of the Helmholtz Association
Physik T1 - Prüfung vom 29. November 2006 mit Lösungen
 Phyik T1 - Prüfung vo 29. Noveber 2006 it Löungen Aufgabe 1 - SI Baigröen und Baieinheiten (6 Punkte) a) Wieviele Baigröen und Baieinheiten gibt e i Internationalen Einheitenyte (SI): b) Nennen Sie diee
Phyik T1 - Prüfung vo 29. Noveber 2006 it Löungen Aufgabe 1 - SI Baigröen und Baieinheiten (6 Punkte) a) Wieviele Baigröen und Baieinheiten gibt e i Internationalen Einheitenyte (SI): b) Nennen Sie diee
J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim Goltz. Workshop Echtzeit Fraunhofer FIRST
 Modellbasierte Generierung von statischen Schedules für sicherheitskritische, eingebettete Systeme mit Multicore Prozessoren und harten Echtzeitanforderungen J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim
Modellbasierte Generierung von statischen Schedules für sicherheitskritische, eingebettete Systeme mit Multicore Prozessoren und harten Echtzeitanforderungen J. Reinier van Kampenhout Robert Hilbrich Hans-Joachim
Testen mit TTCN-3 in der Praxis
 Teten mit TTCN-3 in der Praxi Dr. Andrej Pietchker Siemen AG, CT SE 1 Andrej.Pietchker@iemen.com Inhalt Tetautomatiierung Warum? Beipiel 1: Tet von UMTS (Übergang von TTCN-2 zu TTCN-3) Beipiel 2: Tet von
Teten mit TTCN-3 in der Praxi Dr. Andrej Pietchker Siemen AG, CT SE 1 Andrej.Pietchker@iemen.com Inhalt Tetautomatiierung Warum? Beipiel 1: Tet von UMTS (Übergang von TTCN-2 zu TTCN-3) Beipiel 2: Tet von
Weg im tv-diagramm. 1. Rennwagen
 Weg im v-diagramm 1. Rennwagen Löung: (a). (a) Bechreibe die Fahr de Rennwagen. (b) Wie wei kommm der Rennwagen in den eren vier Minuen, wie wei komm er über den geamen Zeiraum? (c) Wie groß i die Durchchnigechwindigkei
Weg im v-diagramm 1. Rennwagen Löung: (a). (a) Bechreibe die Fahr de Rennwagen. (b) Wie wei kommm der Rennwagen in den eren vier Minuen, wie wei komm er über den geamen Zeiraum? (c) Wie groß i die Durchchnigechwindigkei
Vortrag zum Hauptseminar Hardware/Software Co-Design
 Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Vortrag zum Hauptseminar Hardware/Software Co-Design Robert Mißbach Dresden, 02.07.2008
Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Vortrag zum Hauptseminar Hardware/Software Co-Design Robert Mißbach Dresden, 02.07.2008
FACHHOCHSCHULE MANNHEIM
 Objektorientierte Programmierung 8. Vorlesung Prof. Dr. Peter Knauber FACHHOCHSCHULE MANNHEIM Hochschule für Technik und Gestaltung e Die 1. lgruppe von KobrA: Realization le der Realization: Kurze Structural
Objektorientierte Programmierung 8. Vorlesung Prof. Dr. Peter Knauber FACHHOCHSCHULE MANNHEIM Hochschule für Technik und Gestaltung e Die 1. lgruppe von KobrA: Realization le der Realization: Kurze Structural
Impuls. Aus Energie- und Impulserhaltung ergibt sich, dass die Geschwindigkeit des Tischtennisballs
 Impul. Steht man auf einem Skateboard und pringt nach vorne ab, dann wird im gleichen Moment da Skateboard in entgegengeetzte Richtung bechleunigt. Berechne die Gechwindigkeit mit der ich da Skateboard
Impul. Steht man auf einem Skateboard und pringt nach vorne ab, dann wird im gleichen Moment da Skateboard in entgegengeetzte Richtung bechleunigt. Berechne die Gechwindigkeit mit der ich da Skateboard
Zuverlässigkeitsorientiertes Testmanagement
 Verwendung von Metriken in Tetplanung und -teuerung Zuverläigkeitorientierte Tetmanagement Benedikte Elbel Siemen AG, CT PP 2 Übericht Zuverläigkeit al zentrale Qualitätmetrik Zuverläigkeitorientierte
Verwendung von Metriken in Tetplanung und -teuerung Zuverläigkeitorientierte Tetmanagement Benedikte Elbel Siemen AG, CT PP 2 Übericht Zuverläigkeit al zentrale Qualitätmetrik Zuverläigkeitorientierte
Jahresarbeit im Fach Physik. Erstellung eines Videos zu Experimenten in der Kinematik
 Jahrearbeit im Fach Phyik Ertellung eine Video zu Experimenten in der Kinematik Fachlehrer: Herr Meuer Kur: Leitungkur Phyik 12/2 Namen: Martin Böhme und Maik Münch Datum: 21.12.2001 1. VORWORT 4 2. DIE
Jahrearbeit im Fach Phyik Ertellung eine Video zu Experimenten in der Kinematik Fachlehrer: Herr Meuer Kur: Leitungkur Phyik 12/2 Namen: Martin Böhme und Maik Münch Datum: 21.12.2001 1. VORWORT 4 2. DIE
Mechanik Kinematik des Punktes
 Mechanik Kineatik de Punkte In der Kineatik werden die Bewegunggeetze von Körpern bechrieben. Die gechieht durch die Angabe der Ortkoordinaten und deren Zeitabhängigkeit. In der Kineatik de Punkte wird
Mechanik Kineatik de Punkte In der Kineatik werden die Bewegunggeetze von Körpern bechrieben. Die gechieht durch die Angabe der Ortkoordinaten und deren Zeitabhängigkeit. In der Kineatik de Punkte wird
H2 1862 mm. H1 1861 mm
 1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
Einsatz von Simulationen in der Softwareentwicklung
 Einsatz von Simulationen in der Softwareentwicklung Dr. rer. nat. Olaf Maibaum Deutsches Zentrum für Luft- und Raumfahrt e.v. Simulations- und Softwaretechnik, Braunschweig Dr. Olaf Maibaum. DLR, Simulations-
Einsatz von Simulationen in der Softwareentwicklung Dr. rer. nat. Olaf Maibaum Deutsches Zentrum für Luft- und Raumfahrt e.v. Simulations- und Softwaretechnik, Braunschweig Dr. Olaf Maibaum. DLR, Simulations-
Lehreinheit 09 Prozesssimulation II: Prozesssimulation mit einfachen Petri-Netzen Wintersemester 2012/2013
 Dynamiche Unternehmenmodellierung und -imulation (ehemal: Buine Dynamic - Dynamiche Modellierung und Simulation komplexer Gechäftyteme, Arbeitwienchaft V) Lehreinheit 09 Prozeimulation : Prozeimulation
Dynamiche Unternehmenmodellierung und -imulation (ehemal: Buine Dynamic - Dynamiche Modellierung und Simulation komplexer Gechäftyteme, Arbeitwienchaft V) Lehreinheit 09 Prozeimulation : Prozeimulation
Taschenbuch automatisierte Montage- und Prüfsysteme
 Tachenbuch automatiierte Montage- und Prüfyteme Qualitättechniken zur fehlerfreien Produktion von Franz J Brunner, Stephan Sommer 1. Auflage Tachenbuch automatiierte Montage- und Prüfyteme Brunner / Sommer
Tachenbuch automatiierte Montage- und Prüfyteme Qualitättechniken zur fehlerfreien Produktion von Franz J Brunner, Stephan Sommer 1. Auflage Tachenbuch automatiierte Montage- und Prüfyteme Brunner / Sommer
Objektorientierte Modellierung (1)
") Objektorientierte Modellierung (1) Die objektorientierte Modellierung verwendet: Klassen und deren Objekte Beziehungen zwischen Objekten bzw. Klassen Klassen und Objekte Definition Klasse Eine Klasse ist
Objektorientierte Modellierung (1) Die objektorientierte Modellierung verwendet: Klassen und deren Objekte Beziehungen zwischen Objekten bzw. Klassen Klassen und Objekte Definition Klasse Eine Klasse ist
Beobachten und Messen mit dem Mikroskop
 Phyikaliche Grundpraktikum Veruch 006 Veruchprotokolle Beobachten und een mit dem ikrokop Aufgaben 1. Betimmen de ildungmaßtabe der vorhandenen ektive mit Hilfe eine echraubenokular. Vergleich mit den
Phyikaliche Grundpraktikum Veruch 006 Veruchprotokolle Beobachten und een mit dem ikrokop Aufgaben 1. Betimmen de ildungmaßtabe der vorhandenen ektive mit Hilfe eine echraubenokular. Vergleich mit den
1. Klausur in K1 am
 Name: Punkte: Note: Ø: Kernfach Phyik Abzüge für Dartlung: Rundung:. Klauur in K am. 0. 03 Achte auf gute Dartlung und vergi nicht Geg., Ge., ormn herleiten, Einheiten, Rundung...! 9 Elementarladung: e,60
Name: Punkte: Note: Ø: Kernfach Phyik Abzüge für Dartlung: Rundung:. Klauur in K am. 0. 03 Achte auf gute Dartlung und vergi nicht Geg., Ge., ormn herleiten, Einheiten, Rundung...! 9 Elementarladung: e,60
Agilität trifft Funktionale Sicherheit
 Agilität trifft Funktionale Sicherheit Wie agil können FuSi Projekte sein? Dipl.-Ing. (FH) Martin Heininger HEICON Global Engineering Agiles Manifest 12 Prinzipien hinter dem Agilen Manifest FuSi Softwareentwicklung
Agilität trifft Funktionale Sicherheit Wie agil können FuSi Projekte sein? Dipl.-Ing. (FH) Martin Heininger HEICON Global Engineering Agiles Manifest 12 Prinzipien hinter dem Agilen Manifest FuSi Softwareentwicklung
Lineare Funktionen. Arbeitsschritte Tastenfolge Display. Arbeitsschritte Tastenfolge Display. y p TableStart bei x = -10 Schrittweite: 0,5
 Lineare Funktinen Beiiel: y = 2x - 1 1. Eingabe der Funktingleichung Eingabe der Funktingleichung Y 1 eingeben Á ¹À 2. Wertetabelle Eintellungen für die Wertetabelle y TableStart bei x = -10 Schrittweite:
Lineare Funktinen Beiiel: y = 2x - 1 1. Eingabe der Funktingleichung Eingabe der Funktingleichung Y 1 eingeben Á ¹À 2. Wertetabelle Eintellungen für die Wertetabelle y TableStart bei x = -10 Schrittweite:
2. Praktikum. Maximal drei Personen in jeder Gruppe. Matrikelnummer: Die Vorbereitungsaufgaben sind vor dem Praktikumstermin zu lösen!
 Prof. Dr.-Ing. Jörg Raich Dipl.-Ing. Stephanie Geit Behrang Monajemi Nejad Fachgebiet Regelungyteme Fakultät IV Elektrotechnik und Informatik Techniche Univerität Berlin Integrierte Lehrverantaltung Grundlagen
Prof. Dr.-Ing. Jörg Raich Dipl.-Ing. Stephanie Geit Behrang Monajemi Nejad Fachgebiet Regelungyteme Fakultät IV Elektrotechnik und Informatik Techniche Univerität Berlin Integrierte Lehrverantaltung Grundlagen
Analyse der logischen Systemarchitektur und Spezifikation der technischen Systemarchitektur. Kernprozess zur System- und Software- Entwicklung
 der Benutzeranforderungen & der logischen zur System- und Software- Entwicklung Anwendungsfälle Akzeptanztest & Systemtest der logischen & der technischen Kalibrierung Integrationstest des Systems Integration
der Benutzeranforderungen & der logischen zur System- und Software- Entwicklung Anwendungsfälle Akzeptanztest & Systemtest der logischen & der technischen Kalibrierung Integrationstest des Systems Integration
Autonomes Kreuzungsmanagement für Kraftfahrzeuge
 Autonomes Kreuzungsmanagement für Kraftfahrzeuge Trajektorienplanung mittels Dynamischer Programmierung Torsten Bruns, Ansgar Trächtler AUTOREG 2008 / Baden-Baden / 13.02.2008 Szenario Kreuzungsmanagement
Autonomes Kreuzungsmanagement für Kraftfahrzeuge Trajektorienplanung mittels Dynamischer Programmierung Torsten Bruns, Ansgar Trächtler AUTOREG 2008 / Baden-Baden / 13.02.2008 Szenario Kreuzungsmanagement
Greensche Funktion. Frank Essenberger FU Berlin. 30.September Nomenklatur 1. 2 Greensche Theoreme 1. 3 Anwendung in der Elektrostatik 2
 Greenche Funktion Frank Eenberger FU Berlin 30.September 2006 Inhalterzeichni Nomenklatur 2 Greenche Theoreme 3 Anwendung in der Elektrotatik 2 4 Anpaung an Randbedingungen 3 5 Eindeutigkeit der Löung
Greenche Funktion Frank Eenberger FU Berlin 30.September 2006 Inhalterzeichni Nomenklatur 2 Greenche Theoreme 3 Anwendung in der Elektrotatik 2 4 Anpaung an Randbedingungen 3 5 Eindeutigkeit der Löung
Schnell und kosteneffizient. ELO E-Mail-Management. Die richtige Entscheidung für heute und morgen
 E-Mail-Management E-Mail-Lifecycle-Management al Bai effizienter Gechäftprozee Schnell und koteneffizient Die richtige Entcheidung für heute und morgen Die Enterprie-Content-Management-Löungen (ECM) der
E-Mail-Management E-Mail-Lifecycle-Management al Bai effizienter Gechäftprozee Schnell und koteneffizient Die richtige Entcheidung für heute und morgen Die Enterprie-Content-Management-Löungen (ECM) der
Automatisches Parallelisieren
 Automatisches Parallelisieren Vorlesung im Wintersemester 2010/11 Eberhard Zehendner FSU Jena Thema: Datenabhängigkeitsanalyse Eberhard Zehendner (FSU Jena) Automatisches Parallelisieren Datenabhängigkeitsanalyse
Automatisches Parallelisieren Vorlesung im Wintersemester 2010/11 Eberhard Zehendner FSU Jena Thema: Datenabhängigkeitsanalyse Eberhard Zehendner (FSU Jena) Automatisches Parallelisieren Datenabhängigkeitsanalyse
Protokoll zur Laborübung Verfahrenstechnik. Übung: Filtration. Betreuer: Dr. Gerd Mauschitz. Durchgeführt von:
 Protokoll zur Laborübung Verahrentechnik Übung: Filtration Betreuer: Dr. Gerd Mauchitz Durchgeührt von: Marion Pucher Mtk.Nr.:015440 Kennzahl: S6 Mtk.Nr.:015435 Kennzahl: S9 Datum der Übung:.06.004 1/11
Protokoll zur Laborübung Verahrentechnik Übung: Filtration Betreuer: Dr. Gerd Mauchitz Durchgeührt von: Marion Pucher Mtk.Nr.:015440 Kennzahl: S6 Mtk.Nr.:015435 Kennzahl: S9 Datum der Übung:.06.004 1/11
Wertsteigerung Frei Haus. Der Kostenlose Glasfaseranschluss für Hauseigentümer.
 Wertteigerung Frei Hau. Der Kotenloe Glafaeranchlu für Haueigentümer. Darüber freuen ich nicht nur Ihre Mieter. 40 Millimeter, 1.000 Vorteile. Im Bereich der Kommunikation it Glafaer die Zukunft. 12.000
Wertteigerung Frei Hau. Der Kotenloe Glafaeranchlu für Haueigentümer. Darüber freuen ich nicht nur Ihre Mieter. 40 Millimeter, 1.000 Vorteile. Im Bereich der Kommunikation it Glafaer die Zukunft. 12.000
R. Brinkmann Seite Aufgabe Prüfen Sie ob die Geraden g, h, i durch einen Punkt verlaufen.
 R. Brinkmann http://brinkmann-du.de Seite 9.09.0 Löungen lineare Funktionen Teil V en: A A A Prüfen Sie ob die Geraden g, h, i durch einen Punkt verlaufen. a) g(x) = x+ ; h:y+ x+ 4 = 0 ; i:y x = 7 b) g(x)
R. Brinkmann http://brinkmann-du.de Seite 9.09.0 Löungen lineare Funktionen Teil V en: A A A Prüfen Sie ob die Geraden g, h, i durch einen Punkt verlaufen. a) g(x) = x+ ; h:y+ x+ 4 = 0 ; i:y x = 7 b) g(x)
Cacheoptimierung durch Anpassung der Speicheranordnung
 Cacheoptimierung durch Anpassung der Speicheranordnung Seminar Zwischensprachen und Codeoptimierung, SS 2003 Matthias Heil Matthias Heil Cacheoptimierung durch Anpassung der Speicheranordnung p.1/21 Inhalt
Cacheoptimierung durch Anpassung der Speicheranordnung Seminar Zwischensprachen und Codeoptimierung, SS 2003 Matthias Heil Matthias Heil Cacheoptimierung durch Anpassung der Speicheranordnung p.1/21 Inhalt
Kernprozess zur System- und Softwareentwicklung. Logische Systemarchitektur f 1. f 2 f 3. f 4 Funktion. Technische Systemarchitektur SG 1 SG 2 SG 3
 Systems Engineering Systems Engineering ist die gezielte Anwendung von wissenschaftlichen und technischen Ressourcen! zur Transformation eines operationellen Bedürfnisses in die Beschreibung einer Systemkonfiguration
Systems Engineering Systems Engineering ist die gezielte Anwendung von wissenschaftlichen und technischen Ressourcen! zur Transformation eines operationellen Bedürfnisses in die Beschreibung einer Systemkonfiguration
13.1 Die Laplace-Transformation
 13.1 Die Laplace-ranformation 565 13.1 Die Laplace-ranformation Die Laplace-ranformation it eine Integraltranformation, die jeder Zeitfunktion f(t), t, eine Bildfunktion F () gemäß 13.1 F () = f (t) e
13.1 Die Laplace-ranformation 565 13.1 Die Laplace-ranformation Die Laplace-ranformation it eine Integraltranformation, die jeder Zeitfunktion f(t), t, eine Bildfunktion F () gemäß 13.1 F () = f (t) e
BBS Technik Idar-Oberstein. Impulserhaltung, Stoßgesetze. Anfang Ende actio = reactio. (Beide Wagen haben die gleiche Endgeschwindigkeit)
") Nae: BBS Technik Idar-Obertein Ipulerhaltung, Stoßgeetze Datu: Zwei Wagen bewegen ich laut Skizze. Welche Bewegungzutände herrchen nach de Stoß, wenn... a eine platiche Mae und b ein Feder ich zwichen
Nae: BBS Technik Idar-Obertein Ipulerhaltung, Stoßgeetze Datu: Zwei Wagen bewegen ich laut Skizze. Welche Bewegungzutände herrchen nach de Stoß, wenn... a eine platiche Mae und b ein Feder ich zwichen
Effizientes Peer-to-Peer-Distributionssystem für multimediale Inhalte
 Effiziente Peer-to-Peer-Ditributionytem für multimediale Inhalte Thorten Strufe 0 Gliederung Da -Paradigma Auftretende Skizze de Sytem Zuammenfaung und Aublick Thorten Strufe 1 Warum tun wir da überhaupt?
Effiziente Peer-to-Peer-Ditributionytem für multimediale Inhalte Thorten Strufe 0 Gliederung Da -Paradigma Auftretende Skizze de Sytem Zuammenfaung und Aublick Thorten Strufe 1 Warum tun wir da überhaupt?
Mechanik. LD Handblätter Physik. Überprüfung der Bernoulli-Gleichung Messung mit Drucksensor und CASSY P
 GENZ 2014-10 Mechanik Aero- und Hydrodynamik Meungen in einem Windkanal LD Handblätter Phyik Überprüfung der Bernoulli-Gleichung Meung mit Druckenor und CASSY Veruchziele Überprüfen, ob der dynamiche Druck
GENZ 2014-10 Mechanik Aero- und Hydrodynamik Meungen in einem Windkanal LD Handblätter Phyik Überprüfung der Bernoulli-Gleichung Meung mit Druckenor und CASSY Veruchziele Überprüfen, ob der dynamiche Druck
VERTEILTE SYSTEME (4 SWS)
") VERTEILTE SYSTEME (4 SWS) Inhalt 1. NETZWERKE IN DER AUTOMATISIERUNGSTECHNIK... 1 1.1. Klassifizierung von Produktionsunternehmen... 1 1.2. Aufbaustruktur einer typischen Produktionsanlage... 1 1.3. Automatisierungspyramide:
VERTEILTE SYSTEME (4 SWS) Inhalt 1. NETZWERKE IN DER AUTOMATISIERUNGSTECHNIK... 1 1.1. Klassifizierung von Produktionsunternehmen... 1 1.2. Aufbaustruktur einer typischen Produktionsanlage... 1 1.3. Automatisierungspyramide:
Stabstahl. Normenübersicht. Rundstahl. Vierkantstahl. Bandstahl. Flachstahl. Breitflachstahl. Winkelstahl. T-Stahl. U-Stahl
 Stbthl 01 Normenübericht Rundthl Vierkntthl Bndthl Flchthl Breitflchthl Winkelthl T-Sthl U-Sthl Stbthl Rund-, Vierknt-, Bnd-, Flch-, Breitflchthl, Winkel-, T-, U-Sthl Für diee Produkte gelten folgende
Stbthl 01 Normenübericht Rundthl Vierkntthl Bndthl Flchthl Breitflchthl Winkelthl T-Sthl U-Sthl Stbthl Rund-, Vierknt-, Bnd-, Flch-, Breitflchthl, Winkel-, T-, U-Sthl Für diee Produkte gelten folgende
UML 2 glasklar Praxiswissen für die UML-Modellierung
 Chris Rupp, Stefan Queins, Barbara Zengler UML 2 glasklar Praxiswissen für die UML-Modellierung ISBN-10: 3-446-41118-6 ISBN-13: 978-3-446-41118-0 Inhaltsverzeichnis Weitere Informationen oder Bestellungen
Chris Rupp, Stefan Queins, Barbara Zengler UML 2 glasklar Praxiswissen für die UML-Modellierung ISBN-10: 3-446-41118-6 ISBN-13: 978-3-446-41118-0 Inhaltsverzeichnis Weitere Informationen oder Bestellungen
J und κ =1, 4 behandelt werden. kg K. a) Berechnen Sie die fehlenden Temperaturen und Drücke!
 Berechnen Sie die fehlenden Temperaturen und Drücke!") Übung 11 Aufgabe 7.6: Offene Gaturbine Eine Gaturbinenanlage untercheidet ich vom reveriblen oule-proze dadurch, da der Verdichter und die Turbine nicht ientrop arbeiten. E gilt vielmehr: η S,V =0, 85
Übung 11 Aufgabe 7.6: Offene Gaturbine Eine Gaturbinenanlage untercheidet ich vom reveriblen oule-proze dadurch, da der Verdichter und die Turbine nicht ientrop arbeiten. E gilt vielmehr: η S,V =0, 85
2.6.1 Definition und Darstellung Ausspähen von Graphen Minimal spannende Bäume Kürzeste Pfade 2.6.
 .6 Graphen.6. Definition und Dartellung.6. Aupähen von Graphen.6.3 Minimal pannende Bäume.6.4 Kürzete Pfade.6.5 Maximaler Flu .6.5 Maximaler Flu.6.5. Flunetzwerke.6.5. Ford-Fulkeron-Methode.6.5.3 Algorithmu
.6 Graphen.6. Definition und Dartellung.6. Aupähen von Graphen.6.3 Minimal pannende Bäume.6.4 Kürzete Pfade.6.5 Maximaler Flu .6.5 Maximaler Flu.6.5. Flunetzwerke.6.5. Ford-Fulkeron-Methode.6.5.3 Algorithmu
Zubehör Magnetventile Strömungswächter Temperaturtransmitter Thermostate Drucktransmitter Druckschalter
 77 S t r ö m u n g w ä c h t e r Zubehör Magnetventile Strömungwächter Temperaturtranmitter Thermotate Drucktranmitter Druckchalter 78 S t r ö m u n g w ä c h t e r Produktübericht S 6 0 4 0 S t r ö m
77 S t r ö m u n g w ä c h t e r Zubehör Magnetventile Strömungwächter Temperaturtranmitter Thermotate Drucktranmitter Druckchalter 78 S t r ö m u n g w ä c h t e r Produktübericht S 6 0 4 0 S t r ö m
Verteilte Kyroptographie
 Verteilte Kyroptographie Klassische kryptographische Verfahren Kryptographische Hash-Funktionen Public-Key-Signaturen Verteilte Mechanismen Schwellwert-Signaturen Verteilt generierte Zufallszahlen Verteilte
Verteilte Kyroptographie Klassische kryptographische Verfahren Kryptographische Hash-Funktionen Public-Key-Signaturen Verteilte Mechanismen Schwellwert-Signaturen Verteilt generierte Zufallszahlen Verteilte
EHP Einführung Projekt A
 Volker Dörsing EHP Einführung Projekt A email: doersing@uni-jena.de praktische Übung www: http://users.minet.uni-jena.de/~ehp-head Vorbereitung, Durchführung, Kolloquium Infos zur Veranstaltung, Versuchsanleitung
Volker Dörsing EHP Einführung Projekt A email: doersing@uni-jena.de praktische Übung www: http://users.minet.uni-jena.de/~ehp-head Vorbereitung, Durchführung, Kolloquium Infos zur Veranstaltung, Versuchsanleitung
Nach der Bearbeitung dieses Kapitels soll der Leser in der Lage sein,
 3 1 Einführung Nach der Bearbeitung diee Kapitel oll der Leer in der Lage ein, die Funktionen Invetition und Finanzierung in die Geamtheit der Betriebwirtchaftlehre einzuordnen, ihre Bedeutung für die
3 1 Einführung Nach der Bearbeitung diee Kapitel oll der Leer in der Lage ein, die Funktionen Invetition und Finanzierung in die Geamtheit der Betriebwirtchaftlehre einzuordnen, ihre Bedeutung für die
Produktionsdaten mit Unternehmensdaten vernetzen
 Produktionsdaten mit Unternehmensdaten vernetzen Von Big Data zu Smart Data 17. November 2016 Peter Strohm Marc Tesch Jedox vereinfacht Planung, Reporting & Analyse BI & CPM Software in der Cloud & On-premises
Produktionsdaten mit Unternehmensdaten vernetzen Von Big Data zu Smart Data 17. November 2016 Peter Strohm Marc Tesch Jedox vereinfacht Planung, Reporting & Analyse BI & CPM Software in der Cloud & On-premises
Funktionale Programmierung mit Haskell
 Funktionale Programmierung mit Haskell Dr. Michael Savorić Hohenstaufen-Gymnasium (HSG) Kaiserslautern Version 20120622 Überblick Wichtige Eigenschaften Einführungsbeispiele Listenerzeugung und Beispiel
Funktionale Programmierung mit Haskell Dr. Michael Savorić Hohenstaufen-Gymnasium (HSG) Kaiserslautern Version 20120622 Überblick Wichtige Eigenschaften Einführungsbeispiele Listenerzeugung und Beispiel
Künstliche Intelligenz
 Künstliche Intelligenz Intelligente Agenten Claes Neuefeind Sprachliche Informationsverarbeitung Universität zu Köln 26. Oktober 2011 Agenten Konzept des Agenten Rationalität Umgebungen Struktur von Agenten
Künstliche Intelligenz Intelligente Agenten Claes Neuefeind Sprachliche Informationsverarbeitung Universität zu Köln 26. Oktober 2011 Agenten Konzept des Agenten Rationalität Umgebungen Struktur von Agenten
Entwicklung einer standardisierten Steuerungssoftware für eine Streckenbeeinflussungsanlage am Beispiel der A 8
 Seite: 1 von 7 Entwicklung einer standardisierten Steuerungssoftware für eine Streckenbeeinflussungsanlage am Beispiel der A 8 zwischen AD Leonberg und AS Wendlingen (SSW-SBA-A8) Sonderprogrammvorschau
Seite: 1 von 7 Entwicklung einer standardisierten Steuerungssoftware für eine Streckenbeeinflussungsanlage am Beispiel der A 8 zwischen AD Leonberg und AS Wendlingen (SSW-SBA-A8) Sonderprogrammvorschau
Grundkurs Physik 2. Klausur Thema: Bewegte Ladungen in Feldern
 Datu ae, Vornae Grundkur Phyik. Klauur Thea: Bewegte adungen in eldern Seeter: 11/ Hilfittel: Tafelwerk, Tachenrechner Arbeitzeit: Teil A - 30 in (ohne Hilfittel) Teil B 60 in (it Hilfitteln ae: Vornae:
Datu ae, Vornae Grundkur Phyik. Klauur Thea: Bewegte adungen in eldern Seeter: 11/ Hilfittel: Tafelwerk, Tachenrechner Arbeitzeit: Teil A - 30 in (ohne Hilfittel) Teil B 60 in (it Hilfitteln ae: Vornae:
Der neue Evolution compact. Mit nur 300 mm Schachtvertiefung ein Aufzug wie keiner.
 Der neue Evolution compact. Mit nur 300 mm Schachtvertiefung ein Aufzug wie keiner. Revolutionär: Nur 300 mm Schachtvertiefung. Ein Unternehmen von ThyenKrupp Elevator ThyenKrupp Aufzüge TK Der Evolution
Der neue Evolution compact. Mit nur 300 mm Schachtvertiefung ein Aufzug wie keiner. Revolutionär: Nur 300 mm Schachtvertiefung. Ein Unternehmen von ThyenKrupp Elevator ThyenKrupp Aufzüge TK Der Evolution
Mesh-Visualisierung. Von Matthias Kostka. Visualisierung großer Datensätze
 Mesh-Visualisierung Von Matthias Kostka Übersicht Einführung Streaming Meshes Quick-VDR Rendering virtueller Umgebung Rendering mit PC-Clustern Zusammenfassung 2 Mesh Untereinander verbundene Punkte bilden
Mesh-Visualisierung Von Matthias Kostka Übersicht Einführung Streaming Meshes Quick-VDR Rendering virtueller Umgebung Rendering mit PC-Clustern Zusammenfassung 2 Mesh Untereinander verbundene Punkte bilden
Realisierung von CI- Regelalgorithmen auf verschiedenen Hardwareplattformen
 Realisierung von CI- Regelalgorithmen auf verschiedenen Hardwareplattformen Prof.Dr.-Ing. K.-D. Morgeneier FH Jena, FB Elektrotechnik und Informationstechnik www.fh-jena.de Gliederung 2. Einführung 3.
Realisierung von CI- Regelalgorithmen auf verschiedenen Hardwareplattformen Prof.Dr.-Ing. K.-D. Morgeneier FH Jena, FB Elektrotechnik und Informationstechnik www.fh-jena.de Gliederung 2. Einführung 3.
Physikpraktikum. Versuch 2) Stoß. F α F * cos α
 Stoß. F α F * cos α") Phyikpraktikum Veruch ) Stoß Vorbereitung: Definition von: Arbeit: wenn eine Kraft einen Körper auf einem betimmten Weg verchiebt, o verrichtet ie am Körper Arbeit Arbeit = Kraft * Weg W = * S = N * m
Phyikpraktikum Veruch ) Stoß Vorbereitung: Definition von: Arbeit: wenn eine Kraft einen Körper auf einem betimmten Weg verchiebt, o verrichtet ie am Körper Arbeit Arbeit = Kraft * Weg W = * S = N * m
Drehzahlregelung eines Gleichstrommotors 1
 Techniche Univerität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungyteme Leitung: Prof. Dr.-Ing. Jörg Raich Praktikum Digitale Signalverabeitung Praktikum Regelungtechnik 1 (Zeitdikrete
Techniche Univerität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungyteme Leitung: Prof. Dr.-Ing. Jörg Raich Praktikum Digitale Signalverabeitung Praktikum Regelungtechnik 1 (Zeitdikrete
Schrittweise vorgestellt
 3 MBSE Lehrstuhl für Raumfahrttechnik Schrittweise vorgestellt Was erwartet mich in diesem Kapitel? Erläuterung der MBSE-Methodologie anhand der durchgängigen Beispielmission MOVE Modellierung von Anwendungsfällen
3 MBSE Lehrstuhl für Raumfahrttechnik Schrittweise vorgestellt Was erwartet mich in diesem Kapitel? Erläuterung der MBSE-Methodologie anhand der durchgängigen Beispielmission MOVE Modellierung von Anwendungsfällen
Vorwort der Herausgeber
 V Vorwort der Heraugeber Die Reihe Praxinahe Wirtchafttudium bietet eine lebendige und praxiorientierte Vermittlung aktuellen betriebwirtchaftlichen Wien. Dazu trägt vor allem die langjährige Praxierfahrung
V Vorwort der Heraugeber Die Reihe Praxinahe Wirtchafttudium bietet eine lebendige und praxiorientierte Vermittlung aktuellen betriebwirtchaftlichen Wien. Dazu trägt vor allem die langjährige Praxierfahrung
Angewandte Informatik
 Angewandte Informatik Analyse des Graphs G zur Bestimmung von Parallel- undreihenschaltung Prof. Dr. Nikolaus Wulff Gewichteter Multigraph Die Adjazenzmatrix eines Graphen eignet sich auch zur Analyse
Angewandte Informatik Analyse des Graphs G zur Bestimmung von Parallel- undreihenschaltung Prof. Dr. Nikolaus Wulff Gewichteter Multigraph Die Adjazenzmatrix eines Graphen eignet sich auch zur Analyse
Statistische Analyse von Messergebnissen
 Da virtuelle Bildungnetzwerk für Textilberufe Statitiche Analye von Meergebnien 3 Hochchule Niederrhein Stand: 17..3 Seite 1 / 8 Im Abchnitt "Grundlagen der Statitik" wurde u.a. bechrieben, wie nach der
Da virtuelle Bildungnetzwerk für Textilberufe Statitiche Analye von Meergebnien 3 Hochchule Niederrhein Stand: 17..3 Seite 1 / 8 Im Abchnitt "Grundlagen der Statitik" wurde u.a. bechrieben, wie nach der
Dynamische Programmierung. Problemlösungsstrategie der Informatik
 als Problemlösungsstrategie der Informatik und ihre Anwedung in der Diskreten Mathematik und Graphentheorie Fabian Cordt Enisa Metovic Wissenschaftliche Arbeiten und Präsentationen, WS 2010/2011 Gliederung
als Problemlösungsstrategie der Informatik und ihre Anwedung in der Diskreten Mathematik und Graphentheorie Fabian Cordt Enisa Metovic Wissenschaftliche Arbeiten und Präsentationen, WS 2010/2011 Gliederung
Inhalt. Einleitung Liebe Leserin, lieber Leser, Wer dieses Buch aus welchem Grund lesen sollte Ihre Meinung ist uns sehr wichtig.
 Inhalt Vorwort Einleitung Liebe Leserin, lieber Leser, Wer dieses Buch aus welchem Grund lesen sollte Ihre Meinung ist uns sehr wichtig Danksagungen Die Autoren XIII XV XV XVII XVIII XVIII XIX Teil I:
Inhalt Vorwort Einleitung Liebe Leserin, lieber Leser, Wer dieses Buch aus welchem Grund lesen sollte Ihre Meinung ist uns sehr wichtig Danksagungen Die Autoren XIII XV XV XVII XVIII XVIII XIX Teil I:
Einbau- und Anschlusshinweise EX-Nutenwiderstandsthermometer System RÜSTER V...f EX- NWT - Nutenwiderstandsthermometer
 Einbau- und Anchluhinweie EX-Nutenwidertandthermometer Sytem RÜSTER V...f EX- NWT - Nutenwidertandthermometer Gerätegruppe : II Gerätekategorie : 2G Zone : 1 bzw. 2 Zündchutzart : ia bzw. ib - eigenicher
Einbau- und Anchluhinweie EX-Nutenwidertandthermometer Sytem RÜSTER V...f EX- NWT - Nutenwidertandthermometer Gerätegruppe : II Gerätekategorie : 2G Zone : 1 bzw. 2 Zündchutzart : ia bzw. ib - eigenicher
KULTUSMINISTERIUM DES LANDES SACHSEN-ANHALT
 KULTUSMINISTERIUM DES LANDES SACHSEN-ANHALT Abitur April/Mai 2002 Mathematik (Grundkurs) Arbeitszeit: 210 Minuten Der Prüfling wählt je eine Aufgabe aus den Gebieten G 1, G 2 und G 3 zur Bearbeitung aus.
KULTUSMINISTERIUM DES LANDES SACHSEN-ANHALT Abitur April/Mai 2002 Mathematik (Grundkurs) Arbeitszeit: 210 Minuten Der Prüfling wählt je eine Aufgabe aus den Gebieten G 1, G 2 und G 3 zur Bearbeitung aus.
Agentenunterstütztes IT-Sicherheitskonzept für Automatisierungssysteme
 Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. Dr. h. c. P. Göhner Agentenunterstütztes IT-Sicherheitskonzept für Automatisierungssysteme Felix Gutbrodt GMA-Kongress
Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. Dr. h. c. P. Göhner Agentenunterstütztes IT-Sicherheitskonzept für Automatisierungssysteme Felix Gutbrodt GMA-Kongress
Zubehör Magnetventile Strömungswächter Temperaturtransmitter Thermostate Drucktransmitter Druckschalter
 E l e k t r o n i c h e D r u c k c h a l t e r Zubehör Magnetventile Strömungwächter Temperaturtranmitter Thermotate Drucktranmitter Druckchalter 36 E l e k t r o n i c h e D r u c k c h a l t e r Flüigkeiten
E l e k t r o n i c h e D r u c k c h a l t e r Zubehör Magnetventile Strömungwächter Temperaturtranmitter Thermotate Drucktranmitter Druckchalter 36 E l e k t r o n i c h e D r u c k c h a l t e r Flüigkeiten
Kugelfallviskosimeter
 Kugelfallvikoimeter durchgeführt am 17.05.2010 von Matthia Dräger und Alexander Narweleit 1 PHYSIKALISCHE GRUNDLAGEN 1 Phyikaliche Grundlagen 1.1 Innere Reibung und Vikoität In Körpern herrchen atomare
Kugelfallvikoimeter durchgeführt am 17.05.2010 von Matthia Dräger und Alexander Narweleit 1 PHYSIKALISCHE GRUNDLAGEN 1 Phyikaliche Grundlagen 1.1 Innere Reibung und Vikoität In Körpern herrchen atomare
Aufgaben zum Impuls
 Aufgaben zu Ipul 593. Ein Wagen (Mae 4kg) prallt it einer Gechwindigkeit, / auf einen zweiten ( 5 kg), der ich in gleicher Richtung it der Gechwindigkeit 0,6 / bewegt. a) Wie groß ind die Gechwindigkeiten
Aufgaben zu Ipul 593. Ein Wagen (Mae 4kg) prallt it einer Gechwindigkeit, / auf einen zweiten ( 5 kg), der ich in gleicher Richtung it der Gechwindigkeit 0,6 / bewegt. a) Wie groß ind die Gechwindigkeiten
Aufgabe 1 Welche Eigenschaften muss ein mechanisches System besitzen, damit es periodische Schwingungen ausführen kann?
 Aufgabe 1 Welche Eigenchaften u ein echaniche Syte beitzen, dait e periodiche Schwingungen auführen kann? Aufgabe 2 Ein Federpendel wurde u die Strecke = 15 c au der Ruhelage augelenkt und dann logelaen.
Aufgabe 1 Welche Eigenchaften u ein echaniche Syte beitzen, dait e periodiche Schwingungen auführen kann? Aufgabe 2 Ein Federpendel wurde u die Strecke = 15 c au der Ruhelage augelenkt und dann logelaen.
Generisches Programmieren
 Generiche Programmieren homa Röfer Generiche Klaen und Interface Generiche ypen ypebound Wildcard-ypen Überetzung genericher Klaen Grenzen genericher ypen Polymorphe Methoden Rückblick Vererbung Pakete
Generiche Programmieren homa Röfer Generiche Klaen und Interface Generiche ypen ypebound Wildcard-ypen Überetzung genericher Klaen Grenzen genericher ypen Polymorphe Methoden Rückblick Vererbung Pakete
Institut für angewandte Datenanalyse GmbH
 Institut für angewandte Datenanalyse GmbH Realitätsnahe Marktsimulationen Anwenderorientierte Tools zum Justieren und Prognostizieren 1. Conjoint-Analysen und Marktsimulationen 2. Justierung realer Marktsituationen
Institut für angewandte Datenanalyse GmbH Realitätsnahe Marktsimulationen Anwenderorientierte Tools zum Justieren und Prognostizieren 1. Conjoint-Analysen und Marktsimulationen 2. Justierung realer Marktsituationen
An welchen Wirkungen können wir Kräfte erkennen? Ergebnis Verformung, Beschleunigung, abbremsen, Bewegungsrichtung ändern.
 R. Brinkann http://brinkann-du.de Seite 1 5.11.013 Obertufe: e und auführliche Löungen zur Klaenarbeit zur Mechanik II (Variante A) e: E1 E E3 E4 E5 E6 E7 An welchen Wirkungen können wir Kräfte erkennen?
R. Brinkann http://brinkann-du.de Seite 1 5.11.013 Obertufe: e und auführliche Löungen zur Klaenarbeit zur Mechanik II (Variante A) e: E1 E E3 E4 E5 E6 E7 An welchen Wirkungen können wir Kräfte erkennen?
FMEA- Einführung und Moderation
 Martin Werdich (Hrsg.) FMEA- Einführung und Moderation Durch systematische Entwicklung zur übersichtlichen Risikominimierung (inkl. Methoden im Umfeld) Mit 109 Abbildungen PRAXIS VIEWEG+ TEUBNER Inhalt
Martin Werdich (Hrsg.) FMEA- Einführung und Moderation Durch systematische Entwicklung zur übersichtlichen Risikominimierung (inkl. Methoden im Umfeld) Mit 109 Abbildungen PRAXIS VIEWEG+ TEUBNER Inhalt
Klassifizierung von Agenten. 10.04.07 Verteilt-kooperative Informationssysteme 1
 Klassifizierung von Agenten 10.04.07 Verteilt-kooperative Informationssysteme 1 Klassifizierung von Softwareagenten Schnittstellenagenten Informationsagenten Hybride Agenten Mobile Agenten Kollaborative
Klassifizierung von Agenten 10.04.07 Verteilt-kooperative Informationssysteme 1 Klassifizierung von Softwareagenten Schnittstellenagenten Informationsagenten Hybride Agenten Mobile Agenten Kollaborative
Erkennung von Race Conditions mit Bauhaus
 Erkennung von Race Conditions mit Bauhaus Steffen Keul steffen.keul@informatik.uni-stuttgart.de Abteilung Programmiersprachen Institut für Softwaretechnologie http://www.iste.uni-stuttgart.de/ps Stand
Erkennung von Race Conditions mit Bauhaus Steffen Keul steffen.keul@informatik.uni-stuttgart.de Abteilung Programmiersprachen Institut für Softwaretechnologie http://www.iste.uni-stuttgart.de/ps Stand
Grundwissenkarten Gymnasium Vilsbiburg. 5. und 7. Klasse. Natur und Technik. SP Exp. Arbeiten und Physik
 Grundwienkarten Gymnaium Vilbiburg 5. und 7. Klae Natur und Technik SP Exp. Arbeiten und Phyik E ind: 4 Karten für die 5. Klae SP Experimentelle Arbeiten 11 Karten für die 7. Klae SP Phyik Karten auchneiden
Grundwienkarten Gymnaium Vilbiburg 5. und 7. Klae Natur und Technik SP Exp. Arbeiten und Phyik E ind: 4 Karten für die 5. Klae SP Experimentelle Arbeiten 11 Karten für die 7. Klae SP Phyik Karten auchneiden
Einführung: Internet der Dinge Eine Bestandsaufnahme
 Einführung: Internet der Dinge Eine Bestandsaufnahme Hochschule Offenburg Professur für Embedded Systems und Kommunikationselektronik Leiter Steinbeis Transferzentrum Embedded Design und Networking 1 Internet
Einführung: Internet der Dinge Eine Bestandsaufnahme Hochschule Offenburg Professur für Embedded Systems und Kommunikationselektronik Leiter Steinbeis Transferzentrum Embedded Design und Networking 1 Internet
Technische Universität München. Fakultät für Informatik
 Techniche Univerität München Fakultät für Informatik Forchung- und Lehreinheit Informatik IX Thema: Morphologiche Operationen Proeminar: Grundlagen Bildvertehen/Bildgetaltung Johanne Michael Kohl Betreuer:
Techniche Univerität München Fakultät für Informatik Forchung- und Lehreinheit Informatik IX Thema: Morphologiche Operationen Proeminar: Grundlagen Bildvertehen/Bildgetaltung Johanne Michael Kohl Betreuer:
Verteilte Systeme. Verteilte Systeme. 5 Prozeß-Management SS 2016
 Verteilte Systeme SS 2016 Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404 Stand: 31. Mai 2016 Betriebssysteme / verteilte Systeme Verteilte Systeme (1/14) i
Verteilte Systeme SS 2016 Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404 Stand: 31. Mai 2016 Betriebssysteme / verteilte Systeme Verteilte Systeme (1/14) i
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Einführung: Zustandsdiagramme Stand:
 Einführung: Zustandsdiagramme Stand: 01.06.2006 Josef Hübl (Triple-S GmbH) 1. Grundlagen Zustandsdiagramme Zustände, Ereignisse, Bedingungen, Aktionen 2. Verkürzte Darstellungen Pseudozustände 3. Hierarchische
Einführung: Zustandsdiagramme Stand: 01.06.2006 Josef Hübl (Triple-S GmbH) 1. Grundlagen Zustandsdiagramme Zustände, Ereignisse, Bedingungen, Aktionen 2. Verkürzte Darstellungen Pseudozustände 3. Hierarchische
Cloud Computing Adaption und Umsetzung: Realität schafft Fakten
 Cloud Computing Adaption und Umetzung: Realität chafft Fakten Dr. Lothar Mackert IBM Deutchland GmbH 1 14. Oktober 2010 Cloud Computing verpricht Effizienz und Effektivität Virtualiiert Standardiiert Automatiiert
Cloud Computing Adaption und Umetzung: Realität chafft Fakten Dr. Lothar Mackert IBM Deutchland GmbH 1 14. Oktober 2010 Cloud Computing verpricht Effizienz und Effektivität Virtualiiert Standardiiert Automatiiert
ReCoNets Entwurfsmethodik für eingebettete Systeme bestehend aus kleinen Netzwerken hardwarerekonfigurierbarer Knoten und -verbindungen
 ReCoNets Entwurfsmethodik für eingebettete Systeme bestehend aus kleinen Netzwerken hardwarerekonfigurierbarer Knoten und -verbindungen Ch. Haubelt, D. Koch, T. Streichert, J. Teich Hardware-Software-Co-Design
ReCoNets Entwurfsmethodik für eingebettete Systeme bestehend aus kleinen Netzwerken hardwarerekonfigurierbarer Knoten und -verbindungen Ch. Haubelt, D. Koch, T. Streichert, J. Teich Hardware-Software-Co-Design
Versuch 16 (früher I9) Aufbauten 16/36 (früher I7a/I7b) Logikschaltungen mit dem Bipolartransistor
 Aufbauten 16/36 (früher I7a/I7b) Logikschaltungen mit dem Bipolartransistor") Hochchule Augburg Veruch 16 (früher I9) Aufbauten 16/36 (früher I7a/I7b) Logikchaltungen mit dem Bipolartranitor Phyikaliche Praktikum Die Funktionweie von Bipolartranitoren ollte vor Veruch 9 im Theorieteil
Hochchule Augburg Veruch 16 (früher I9) Aufbauten 16/36 (früher I7a/I7b) Logikchaltungen mit dem Bipolartranitor Phyikaliche Praktikum Die Funktionweie von Bipolartranitoren ollte vor Veruch 9 im Theorieteil
Corporate IT Monitoring
 Corporate IT Monitoring Bei der ING-DiBa AG Dr. Sven Wohlfarth (s.wohlfarth@ing-diba.de) Teamleiter ING-DiBa Command Center Nürnberg 17.10.2012 www.ing-diba.de ING-DiBa im Überblick Frankfurt Nürnberg
Corporate IT Monitoring Bei der ING-DiBa AG Dr. Sven Wohlfarth (s.wohlfarth@ing-diba.de) Teamleiter ING-DiBa Command Center Nürnberg 17.10.2012 www.ing-diba.de ING-DiBa im Überblick Frankfurt Nürnberg
PHYSIK Gekoppelte Bewegungen 2
 PHYSIK Gekoppelte Bewegungen Gekoppelte Bewegungen auf chiefer Ebene Datei Nr. 93 Friedrich W. Buckel ktober 00 Internatgynaiu Schloß Torgelow Inhalt Grundwien Bewegung ohne äußeren Antrieb (Beipiel )
PHYSIK Gekoppelte Bewegungen Gekoppelte Bewegungen auf chiefer Ebene Datei Nr. 93 Friedrich W. Buckel ktober 00 Internatgynaiu Schloß Torgelow Inhalt Grundwien Bewegung ohne äußeren Antrieb (Beipiel )