Computergrafik 2: Filtern im Frequenzraum
|
|
|
- Guido Linden
- vor 6 Jahren
- Abrufe
Transkript
1 Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen der Bildverarbeitung. Pearson Studium, 2005)
2 Themen heute Korrelation im Frequenzraum Finden von Templates Filtern im Frequenzraum Bandreject/Bandpass-Filter Notch-Filter, optimale Notch-Filter Dekonvolution inverses Filtern Wiener Filter Transformation und Interpolation Rauschunterdrückung mit Ähnlichkeitsfilter Computergrafik 2 SS2011 2
3 KORRELATION IM FREQUENZRAUM Computergrafik 2 SS2011 3
4 Korrelation im Ortsraum Ähnlichkeiten zwischen Bild und Modell feststellen Modell (Template) im Bild suchen R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS2011 4
5 Korrelation im Ortsraum Ähnlichkeitsmaß (normalisierter) Korrelationskoeffizient Mittelwerte subtrahiert und Varianzen normiert Kleineres Bild pixelweise über größeres Bild verschieben und Korrelationskoeffizient ausrechnen (f = Bild, m = Modell/Template, (x,y) = Suchposition) cc f,m (x, y) = # % $ a " a " s=!a t=!b!1) cc f,m (x, y) )1 b " s=!a t=!b b " ( m(s,t)! m) f (x + s, y + t)! f (x + s, y + t) ( ) ( m(s,t)! m) 2 &# a b (%" " f (x + s, y + t)! f (x + s, y + t) ' $ s=!a t=!b ( ) 2 & ( ' Computergrafik 2 SS2011 5
6 Korrelation im Frequenzraum Subtrahiere Mittelwerte von f und g (bzw. m) Ähnlichkeitsmaß: Korrelationskoeffizient cc f,g cc f,g =! f,g! f, f!! g,g =! f,g! f 2!! g 2! f,g = 1 MN cc f,g (x, y) $ M"1 N"1 ## s=0 t=0 ( f (s,t)" f (s,t)) g(s,t)" g(s,t) 1 MN! f 2!! g 2 M"1 N"1 ## s=0 t=0 ( ) ( f (x + s, y + t)" f (x + s, y + t) ) m(s,t)" m ( ) M"1 N"1 ## = k f (x + s, y + t)! m(s,t) s=0 t=0 Korrelationsfunktion FT ([ f! g](x, y) ) = F(u, v)!g " (u, v) Korrelation G konjugiert Computergrafik 2 SS2011 6
 = \" f (m, n) # h(x + m, y + n) $ F(u, v)# H m=0\" % (u, v) n=0 Vorgehen M!1 1. Mittelwerte abziehen 2. Padding im Ortsraum auf 2M, 2N 3. Multiplikation mit (-1) x+y 4. DFT 5.")
7 Korrelation im Frequenzraum Statt Korrelation im Ortsraum nun Multiplikation mit konjugiert komplexem Modell im Frequenzraum f (x, y)! h(x, y) = " f (m, n) # h(x + m, y + n) $ F(u, v)# H m=0" % (u, v) n=0 Vorgehen M!1 1. Mittelwerte abziehen 2. Padding im Ortsraum auf 2M, 2N 3. Multiplikation mit (-1) x+y 4. DFT 5. Multiplikation mit H* im Frequenzraum 6. inverse DFT, Realteil 7. Multiplikation mit (-1) x+y 8. Padding entfernen N! F H* 4. 5., R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS2011 7
8 Korrelation im Frequenzraum Computergrafik 2 SS2011 8


9 Computergrafik 2 SS2011 9


10 Computergrafik 2 SS

11 Korrelation im Frequenzraum Computergrafik 2 SS


12 grau kursiv match, falls Teile vorhanden Computergrafik 2 SS
13 Grenzen des Korrelations-Matching Abhängigkeit von Skalierung Rotation Perspektive später in der Vorlesung leistungsfähigere Verfahren Computergrafik 2 SS
14 Bandreject/Bandpass-Filter Notch-Filter Computergrafik 2 SS

15 Bandreject-Filter Nützlich, wenn Sörungen in einem bestimmten Frequenzband konzentriert sind Selektive Bandreject-Filter können solche Störungen reduzieren R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS
 =1! exp! D2 2! D 0 * ) ), ( ( DW + ( u, v) =1! H ( BR u, v) 2 *, + Gauß- Bandreject- Filter Gauß- Bandpass- Filter R. C. Gonzalez & R. E.")
16 Bandreject/Bandpass-Filter Bandreject-Filter Ideal Butterworth Gauß Bandpass-Filter H BP H ( u, v) = # % $ % & 0, falls D 0! W 2 " D " D 0 + W 2 1, sonst 1 H(u, v) = ' DW 1+ ) D 2 2 (! D 0 *, + 2n ' ' H(u, v) =1! exp! D2 2! D 0 * ) ), ( ( DW + ( u, v) =1! H ( BR u, v) 2 *, + Gauß- Bandreject- Filter Gauß- Bandpass- Filter R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS


17 Beispiel: Artefakte entfernen Bandreject-Filter R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS




18 Beispiel: Artefakte entfernen Bandpassfilter isoliert Artefakt Bandpass-Filter R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS
19 Notch-Filter Filtert in einer bestimmten Umgebung Symmetrisch zum Ursprung R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS
20 Notch-Filter Filtert in einer bestimmten Umgebung (u 0,v 0 ) Müssen symmetrisch zum Ursprung sein wenn Zentrum (u 0,v 0 ), dann auch auch (-u 0,-v 0 ) sonst verändert sich die Phase Gebildet aus Produkt von Hochpass-Filtern H NR ( u, v) = H ( k u, v)! H "k u, v wobei H k (u,v) und H -k (u,v) ihre Zentren bei (u k,v k ) bzw. (-u k,-v k ) haben; Distanzen relativ zu diesen Zentren Notch-Pass-Filter H NP Q # k=1 u, v ( ) =1! H NR u, v ( ) ( ) Computergrafik 2 SS


21 Beispiel: Reduzierung Moiré-Muster R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS


22 Beispiel: Reduzierung Interferenzmuster R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS


23 Beispiel: Reduzierung Interferenzmuster Notch-Pass-Filter isoliert Interferenzmuster R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS
24 RESTAURATION LINEARER BILDSTÖRUNGEN Computergrafik 2 SS
25 Beispiel I: Bewegungsunschärfe Über einen Zeitraum Δt wird ein Objektpunkt p auf immer andere Punkte auf dem CCD-Chip abgebildet. Bei unbewegter Kamera sei die Bildhelligkeit des abgebildeten Punkts h. Dann ist sie bei bewegter Kamera h/δs, wobei Δs die zurückgelegte Strecke ist. Wenn Δs für alle Punkte gleich ist, dann lässt sich die Veränderung durch eine Faltung beschreiben. K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS
26 Bewegungsunschärfe Faltungskern ist eine Funktion w mit # % 1 t < "s w( t! cos!,t!sin!) = $ "s 2 % & 0 sonst Der Winkel α gibt die Bewegungsrichtung an. Die Strecke PΔs gibt die Strecke an, um die sich der Punkt bewegt hat: P!s K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS

27 Bewegungsunschärfe = * Gestörtes Bild Original Faltungskern K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS
 K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS2011 28")
28 Repräsentation linearer Störungen Jede verschiebungsinvariante lineare Operation wird vollständig durch die Faltungsfunktion beschrieben. Die Faltungsfunktion beschreibt die Operation für beliebige Bilder Die Faltungsfunktion kann als Resultat der Veränderung eines Punkts erzeugt werden Punktantwort = Point Spread Function (PSF) K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS

29 Beispiel II: Fokussierungsunschärfe Maß der Unschärfe hängt vom Punktabstand z, der Brennweite der Linse f und der Kammerkonstante f k ab. Linsengesetz: Größe des Unschärfekreises: Unschärfe kann durch Aufnahme eines punktförmigen Testobjekts angenähert werden. K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS


30 Fokussierungsunschärfe Wie kann die Störung rückgängig gemacht werden? Computergrafik 2 SS
31 Bildrestauration Ziel: Korrektur des Bildsignals um bekannte und unbekannte Störungen Annahme: Störung kann durch einen verschiebungsinvarianten linearen Operator h beschrieben werden g(x,y) à (Störung durch PSF h) à g'(x,y) g'(x,y) = [h*g] (x,y) PSF beschreibt die Störung à Wie kann die PSF bestimmt werden? Computergrafik 2 SS

32 Gesucht: PSF K. D. Tönnies, Grundlagen der Bildverarbeitung Computergrafik 2 SS


33 PSF von Testbildern Annahme: Störung konstant und Testaufnahme möglich Durch die Aufnahme eines punktförmigen Objekts kann ein δ-impuls approximiert werden Aufnahme ist eine Näherung für die PSF Computergrafik 2 SS
34 PSF aus dem aufgenommenen Bild Falls Testaufnahme nicht möglich: Näherungsweise Bestimmung der PSF durch Betrachtung von Punkten oder Linien im gestörten Bild Computergrafik 2 SS
35 Kanten Die meisten Bilder weisen wenige Linien oder Punkte auf, aber Kanten können in fast jedem Bild gefunden werden. Computergrafik 2 SS
36 1D-Kanten Die Stärke einer Kante hängt von der Steigung der Funktion ab: Betrag der ersten Ableitung bestimmen Für diskrete Funktionen: Ableitung wird durch Differenz angenähert Computergrafik 2 SS
37 Kanten im 2D-Raum: Gradienten Gradient im kontinuierlichen Raum (x,y): Vektor der partiellen Ableitungen der Bildfunktion in x- und y-richtung: (f(x,y)) = ( f/ x f/ y) Approximation des Gradienten: Differential wird durch Differenz approximiert: Die Länge des Gradienten ist sein Betrag G(f) oder näherungsweise Gx + Gy. Computergrafik 2 SS

 Computergrafik 2")
38 Elemente des Gradienten Betrag: sqrt(g x 2 + G y2 ) Richtung: tan -1 (G y / G x ) Computergrafik 2 SS
39 PSF aus Kanten PSF kann aus dem Verlauf einer als ideal angenommenen Kante approximiert werden Computergrafik 2 SS
 = FT[g'(m,n)] =")
] = H(u,v) G(u,v) Invertierung: g(m,n) =](/docs-images/65/53211458/images/40-1.jpg "FT -1 [G'(u,v)/H(u,v)] ß Inverse Filterung")
40 Invertierung der Störung Überführung der Repräsentation in den Frequenzraum: G'(u,v) = FT[g'(m,n)] = FT[[h*g](m,n)] = H(u,v) G(u,v) Invertierung: g(m,n) = FT -1 [G'(u,v)/H(u,v)] ß Inverse Filterung Computergrafik 2 SS
= Computergrafik 2 SS2011")
41 Inverse Filterung Vollständige Rückgewinnung der Information aus den gestörten Daten FT -1 ( / )= Computergrafik 2 SS


42 Bewegungsunschärfe PSF FT(PSF) Computergrafik 2 SS
43 Bewegungsunschärfe Resultat der inversen Filterung FT -1 [FT(g )(u,v)/ft(psf)(u,v)] Computergrafik 2 SS
44 Numerische Probleme bei der inversen Filterung g = h* f ( m, n) = Problem: Nullstellen von H Treten auf, falls h als Matrix nicht den vollen Rang hat Auch kleine Werte von H sind numerisch schon ein Problem Deswegen in der Praxis: F ( u v) f (, v) ( u, v) FT 1 (, v) ( ) u, v G u H G u H ( u, v) > H min, = H 0 sonst Computergrafik 2 SS
 = f (m, n)* h(m, n)+!(m, n) G(u, v) = F(u, v)!")
45 Rauschen Problem: Inverse Filterung geht von idealen (ungestörten) Daten aus aber: Bilddaten enthalten Rauschen inverse Filterung verstärkt Rauschen extrem mit steigender Frequenz: (weißes) Rauschen bleibt, Signal- Amplitude nimmt schnell ab, Rauschanteil wird höher g(m, n) = f (m, n)* h(m, n)+!(m, n) G(u, v) = F(u, v)! H(u, v)+ N(u, v) " G(u, v) H(u, v) = F(u, v)+ N(u, v) H(u, v) ad-hoc Lösung: hohe Frequenzen ausschließen Computergrafik 2 SS
+ N(u, v) \" G(u, v) H(u, v) =")
 Computergrafik 2")
46 Rauschen G(u, v) = F(u, v)! H(u, v)+ N(u, v) " G(u, v) H(u, v) = F(u, v)+ N(u, v) H(u, v) PSF: H(u, v) inv. PSF: 1 H(u, v) Computergrafik 2 SS

47 Rauschen Invertierung bei Rauschen oft nicht möglich Computergrafik 2 SS


48 Abschneiden hoher Frequenzen komplettes Filter cut-off-radius: 40 unscharfes Bild cut-off-radius:70 cut-off-radius:85 R. C. Gonzalez & R. E. Woods, Digital Image Processing Computergrafik 2 SS
49 Gewichtete inverse Filterung Gewichtung der inversen Filterung mit der Amplitude der Störungsfunktion im Verhältnis zur mittleren Amplitude des Signals H 1 ( u, v) H ( u, v) A N Amplitude der PSF A N mittlere Amplitude der Rauschens Gewichtungsfaktor Problem: Gewichtung nimmt keine Rücksicht auf die Signalstärke von F Falls Amplitude von F hoch, kann Abschwächung kleiner, d.h. Gewicht größer sein Computergrafik 2 SS
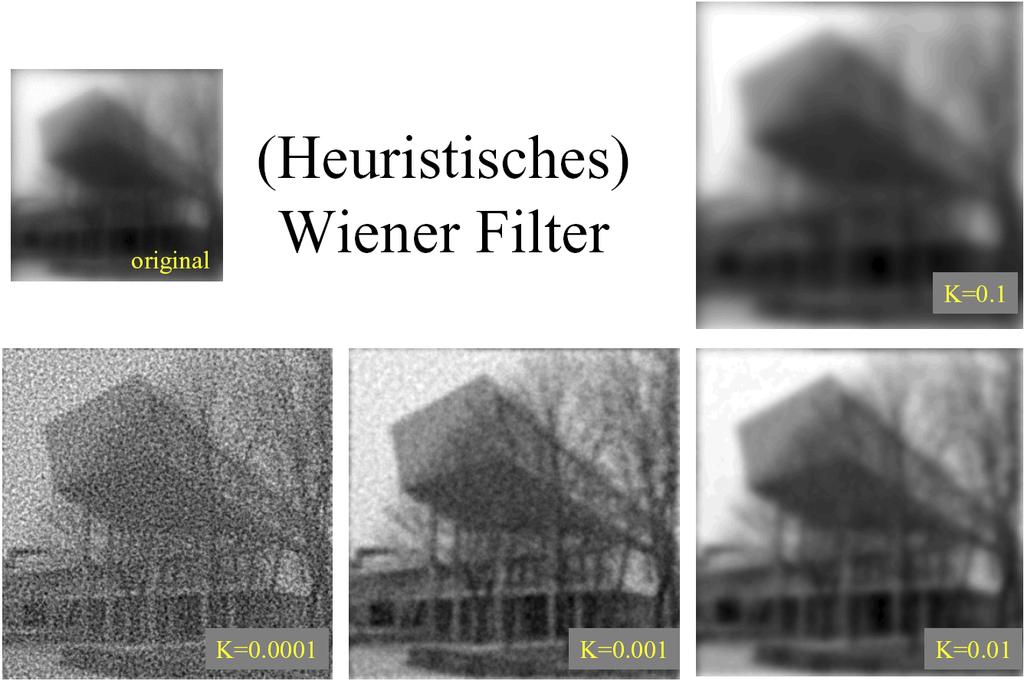
50 Wiener Filter Minimierung des Fehlers zwischen Originalbild f und Schätzer ˆf führt zu ˆF(u, v) = X(u, v)!g(u, v) X(u, v) = 1 H u, v ( ) H ( u, v) 2 ( ) 2 + S! ( u, v) S f ( u, v) H u, v = 1 H u, v ( ) H ( u, v) 2 ( ) 2 + N ( u, v ) 2 F ( u, v) 2 H u, v S η und S f sind die Spektren (Quadrate der Amplituden) des Rauschens bzw. der ungestörten Funktion S η = 0 (ungestört) è perfekte inverse Filterung Wiener Filter dämpft Frequenzen abhängig von SNR Computergrafik 2 SS
51 heuristisches Wiener Filter Leider ist S η in der Praxis meist unbekannt ˆf Lösung: Konstante K: heuristisches Wiener Filter ˆF K (u, v) = X K (u, v)!g(u, v) X K (u, v) = 1 H u, v ( ) H ( u, v) 2 H u, v ( ) 2 + K Computergrafik 2 SS

52 Computergrafik 2 SS
53 Computergrafik 2 SS
54 TRANSFORMATION UND INTERPOLATION Computergrafik 2 SS
55 Transformation und Interpolation Die Transformationen Translation, Rotation und Skalierung sind auf reellen Zahlen definiert Digitale Bilder haben einen ganzzahligen Definitionsbereich Nach Transformation ist eine Interpolation notwendig Computergrafik 2 SS

56 Interpolation Konstante Interpolation (Wert des nächsten Nachbarpixels) Lineare Interpolation Interpolation durch Polynome höheren Grades Interpolation im Frequenzraum Computergrafik 2 SS

57 Konstante Interpolation Computergrafik 2 SS
58 Bilineare Interpolation Computergrafik 2 SS
59 Polynome höheren Grades Interpolation der Bildfunktion durch mehr als 2 Stützpunkte Polynom n-ten Grades interpoliert n+1 Punkte Die Bildfunktion wird besser angenähert, wenn mehr Terme der Taylor-Approximation berücksichtigt werden. Ableitungen für Taylor-Reihe durch Differenzen angenähert Grad des Polynoms ist ein Kompromiss zwischen steigender Anzahl berücksichtigter Terme der Taylor-Reihe steigender Ungenauigkeit der geschätzten Ableitungen bilinear bikubisch Computergrafik 2 SS
60 RAUSCHUNTERDRÜCKUNG MIT ÄHNLICHKEITSFILTER Computergrafik 2 SS
61 Nicht-lokale Mittelwertbildung Mehrere verrauschte Bilder einer statischen Szene Rauschen hat Mittelwert 0 Mittelwert bilden Figures from: Shahar Kovalsky, Alon Faktor: A Tour of Image Denoising, Slides Computergrafik 2 SS

62 Nicht-lokale Mittelwertbildung Redundanz in natürlichen Bildern ausnutzen Figures from: Shahar Kovalsky, Alon Faktor: A Tour of Image Denoising, Slides Computergrafik 2 SS
 = w(i, j)v( j) Gewichtsfunktion w(i, j) = 1 \" Z(i) exp! v(n 2 i)! v(n j ) % $ 2,a ' $ h 2 ' # & \" Z(i) = exp! v(n )!")
63 Buades, Coll, Morel: Gewichteter Mittelwert durch Selbst-Ähnlichkeit Verrauschtes Bild: v = { v(i) i! I}, v(i) = u(i)+ n(i) Nicht-lokaler Mittelwert: " j!i NL[v](i) = w(i, j)v( j) Gewichtsfunktion w(i, j) = 1 " Z(i) exp! v(n 2 i)! v(n j ) % $ 2,a ' $ h 2 ' # & " Z(i) = exp! v(n )! v(n ) 2 % $ i j 2,a ' ( $ h 2 ' j # & Figures from: Shahar Kovalsky, Alon Faktor: A Tour of Image Denoising, Slides Computergrafik 2 SS
Computergraphik 1 2. Teil: Bildverarbeitung. Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation
 Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Computergrafik 2: Übung 6. Korrelation im Orts- und Frequenzraum, Filtern im Frequenzraum, Wiener Filter
 Computergrafik : Übung 6 Korrelation im Orts- und Frequenzraum, Filtern im Frequenzraum, Wiener Filter Quiz Warum Filtern im Frequenzraum? Ideales Tiefpassfilter? Parameter? Eigenschaften? Butterworth-Filter?
Computergrafik : Übung 6 Korrelation im Orts- und Frequenzraum, Filtern im Frequenzraum, Wiener Filter Quiz Warum Filtern im Frequenzraum? Ideales Tiefpassfilter? Parameter? Eigenschaften? Butterworth-Filter?
Computergrafik 2: Filtern im Frequenzraum
 Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Frequenzraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum
 Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum
 Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Filtern im Ortsraum Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Morphologische Operationen
 Computergrafik 2: Morphologische Operationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies
Computergrafik 2: Morphologische Operationen Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies
Übung zur Vorlesung 2D Grafik Wintersemester 05/06. Otmar Hilliges
 Übung zur Vorlesung 2D Grafik Wintersemester 05/06 Übungsblatt 5 Musterlösung auf der Übungsseite. https://wiki.medien.ifi.lmu.de/pub/main/uebung2dgrafikws 0506/FFT_LSG.jar Page 2 transform() for (y =
Übung zur Vorlesung 2D Grafik Wintersemester 05/06 Übungsblatt 5 Musterlösung auf der Übungsseite. https://wiki.medien.ifi.lmu.de/pub/main/uebung2dgrafikws 0506/FFT_LSG.jar Page 2 transform() for (y =
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV, Regina Pohle,. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Bildverbesserung - Filterung Graphische DV und BV, Regina Pohle,. Bildverbesserung - Filterung Einordnung in die Inhalte der Vorlesung
Computergrafik 2: Fourier-Transformation
 Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Was bisher geschah. digitale Bilder: Funktion B : pos col Matrix B col pos. Punktoperationen f : col 1 col 2
 Was bisher geschah digitale Bilder: Funktion B : pos col Matrix B col pos statistische Merkmale Punktoperationen f : col 1 col 2 (Bildanalyse) (Farbtransformation) Geometrische Operationen f : pos 1 pos
Was bisher geschah digitale Bilder: Funktion B : pos col Matrix B col pos statistische Merkmale Punktoperationen f : col 1 col 2 (Bildanalyse) (Farbtransformation) Geometrische Operationen f : pos 1 pos
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Fourier-Transformation Graphische DV und BV, Regina Pohle, 8. Fourier-Transformation 1 Einordnung in die Inhalte der Vorlesung Einführung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Fourier-Transformation Graphische DV und BV, Regina Pohle, 8. Fourier-Transformation 1 Einordnung in die Inhalte der Vorlesung Einführung
1. Filterung im Ortsbereich 1.1 Grundbegriffe 1.2 Lineare Filter 1.3 Nicht-Lineare Filter 1.4 Separabele Filter 1.
 . Filterung im Ortsbereich. Grundbegriffe. Lineare Filter.3 Nicht-Lineare Filter.4 Separabele Filter.5 Implementierung. Filterung im Frequenzbereich. Fouriertransformation. Hoch-, Tief- und Bandpassfilter.3
. Filterung im Ortsbereich. Grundbegriffe. Lineare Filter.3 Nicht-Lineare Filter.4 Separabele Filter.5 Implementierung. Filterung im Frequenzbereich. Fouriertransformation. Hoch-, Tief- und Bandpassfilter.3
Kapitel 7. Bildverarbeitung im Frequenzraum
 Kapitel 7 Bildverarbeitung im Frequenzraum Durchführung von Faltungen im Frequenzraum Filterung im Frequenzraum: Tiefpass- und Hochpass-Filter, etc. Bildrestaurierung Notch-Filter: Entfernung periodischer
Kapitel 7 Bildverarbeitung im Frequenzraum Durchführung von Faltungen im Frequenzraum Filterung im Frequenzraum: Tiefpass- und Hochpass-Filter, etc. Bildrestaurierung Notch-Filter: Entfernung periodischer
Systemtheorie abbildender Systeme
 Bandbegrenzung Bild in (b) nicht band-begrenzt: scharfe Kanten = Dirac-Funktionen = weißes Spektrum Erfordert Tapering vor Digitalisierung (Multiplikation mit geeigneter Fensterfunktion; auf Null drücken
Bandbegrenzung Bild in (b) nicht band-begrenzt: scharfe Kanten = Dirac-Funktionen = weißes Spektrum Erfordert Tapering vor Digitalisierung (Multiplikation mit geeigneter Fensterfunktion; auf Null drücken
Einführung in die medizinische Bildverarbeitung WS 12/13
 Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Pipeline Pipelinestufen können sich unterscheiden, beinhalten aber i.d.r. eine Stufe zur Bildvorverarbeitung zur
Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Pipeline Pipelinestufen können sich unterscheiden, beinhalten aber i.d.r. eine Stufe zur Bildvorverarbeitung zur
Computergrafik 2: Fourier-Transformation
 Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Fourier-Transformation Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Bildverarbeitung. Bildvorverarbeitung - Fourier-Transformation -
 Bildverarbeitung Bildvorverarbeitung - Fourier-Transformation - 1 Themen Methoden Punktoperationen / Lokale Operationen / Globale Operationen Homogene / Inhomogene Operationen Lineare / Nichtlineare Operationen
Bildverarbeitung Bildvorverarbeitung - Fourier-Transformation - 1 Themen Methoden Punktoperationen / Lokale Operationen / Globale Operationen Homogene / Inhomogene Operationen Lineare / Nichtlineare Operationen
R.Wagner, Mathematik in der Astronomie
 Mathematik in der Astronomie Roland Wagner Johann Radon Institute for Computational and Applied Mathematics (RICAM) Österreichische Akademie der Wissenschaften (ÖAW) Linz, Austria Linz, 20.Mai 2016 Übersicht
Mathematik in der Astronomie Roland Wagner Johann Radon Institute for Computational and Applied Mathematics (RICAM) Österreichische Akademie der Wissenschaften (ÖAW) Linz, Austria Linz, 20.Mai 2016 Übersicht
Computergrafik 2: Übung 2. Subsampling und Moiré-Effekte, Color Maps und Histogrammlinearisierung
 Computergrafik 2: Übung 2 Subsampling und Moiré-Effekte, Color Maps und Histogrammlinearisierung Inhalt Besprechung von Übung 1 Subsampling und Moiré Effekte Color Maps Histogrammlinearisierung Computergrafik
Computergrafik 2: Übung 2 Subsampling und Moiré-Effekte, Color Maps und Histogrammlinearisierung Inhalt Besprechung von Übung 1 Subsampling und Moiré Effekte Color Maps Histogrammlinearisierung Computergrafik
Struktur des menschlichen Auges. Bildgebende Verfahren in der Medizin und medizinische Bildverarbeitung Bildverbesserung 2 / 99
 Struktur des menschlichen Auges 2 / 99 Detektoren im Auge Ca. 100 150 Mio. Stäbchen Ca. 1 Mio. Zäpfchen 3 / 99 Zapfen Entlang der Sehachse, im Fokus Tagessehen (Photopisches Sehen) Scharfsehen Farbsehen
Struktur des menschlichen Auges 2 / 99 Detektoren im Auge Ca. 100 150 Mio. Stäbchen Ca. 1 Mio. Zäpfchen 3 / 99 Zapfen Entlang der Sehachse, im Fokus Tagessehen (Photopisches Sehen) Scharfsehen Farbsehen
Bildverarbeitung: Filterung. D. Schlesinger () Bildverarbeitung: Filterung 1 / 17
 Bildverarbeitung: Filterung 1 / 17") Bildverarbeitung: Filterung D. Schlesinger () Bildverarbeitung: Filterung 1 / 17 Allgemeines Klassische Anwendung: Entrauschung (Fast) jeder Filter basiert auf einem Modell (Annahme): Signal + Rauschen
Bildverarbeitung: Filterung D. Schlesinger () Bildverarbeitung: Filterung 1 / 17 Allgemeines Klassische Anwendung: Entrauschung (Fast) jeder Filter basiert auf einem Modell (Annahme): Signal + Rauschen
Digitale Bildverarbeitung Einheit 8 Lineare Filterung
 Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen, wie lineare
Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen, wie lineare
FILTER UND FALTUNGEN
 Ausarbeitung zum Vortrag von Daniel Schmitzek im Seminar Verarbeitung und Manipulation digitaler Bilder I n h a l t. Der Begriff des Filters 3 2. Faltungsfilter 4 2. Glättungsfilter 4 2.2 Filter zur Kantendetektion
Ausarbeitung zum Vortrag von Daniel Schmitzek im Seminar Verarbeitung und Manipulation digitaler Bilder I n h a l t. Der Begriff des Filters 3 2. Faltungsfilter 4 2. Glättungsfilter 4 2.2 Filter zur Kantendetektion
Bildverarbeitung 5 Frequenzraum und Bildrestauration
 Bildverarbeitung 5 Frequenzraum und Bildrestauration Frühjahrssemester 04 ETH Zürich Jan Dirk Wegner und Michal Havlena ETH Zürich Institut ür Geodäsie und Photogrammetrie (mit Material von Uwe Sörgel
Bildverarbeitung 5 Frequenzraum und Bildrestauration Frühjahrssemester 04 ETH Zürich Jan Dirk Wegner und Michal Havlena ETH Zürich Institut ür Geodäsie und Photogrammetrie (mit Material von Uwe Sörgel
Computergrafik 2: Kanten, Linien, Ecken
 Computergrafik 2: Kanten, Linien, Ecken Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Kanten, Linien, Ecken Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Grundlagen der Signalverarbeitung
 Grundlagen der Signalverarbeitung Digitale und analoge Filter Wintersemester 6/7 Wiederholung Übertragung eines sinusförmigen Signals u t = U sin(ω t) y t = Y sin ω t + φ ω G(ω) Amplitude: Y = G ω U Phase:
Grundlagen der Signalverarbeitung Digitale und analoge Filter Wintersemester 6/7 Wiederholung Übertragung eines sinusförmigen Signals u t = U sin(ω t) y t = Y sin ω t + φ ω G(ω) Amplitude: Y = G ω U Phase:
Bildrekonstruktion & Multiresolution
 Bildrekonstruktion & Multiresolution Verkleinern von Bildern? Was ist zu beachten? Es kann aliasing auftreten! Das Abtasttheorem sagt wie man es vermeidet? ===> Page 1 Verkleinern von Bildern (2) Vor dem
Bildrekonstruktion & Multiresolution Verkleinern von Bildern? Was ist zu beachten? Es kann aliasing auftreten! Das Abtasttheorem sagt wie man es vermeidet? ===> Page 1 Verkleinern von Bildern (2) Vor dem
Digitale Bildverarbeitung Einheit 8 Lineare Filterung
 Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag WS 05/06 Fachbereich M+I der FH-Offenburg Dipl.-Math. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag WS 05/06 Fachbereich M+I der FH-Offenburg Dipl.-Math. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen,
Faltung, Korrelation, Filtern
 Faltung, Korrelation, Filtern Wie beschreibe ich lineare Systeme (z.b. Seismometer) -> Faltung, Konvolution, Dekonvolution? Wie quantifiziere ich die Ähnlichkeit von Zeitreihen (-> Korrelation) Wie quantifiziere
Faltung, Korrelation, Filtern Wie beschreibe ich lineare Systeme (z.b. Seismometer) -> Faltung, Konvolution, Dekonvolution? Wie quantifiziere ich die Ähnlichkeit von Zeitreihen (-> Korrelation) Wie quantifiziere
Einführung in die medizinische Bildverarbeitung SS 2013
 Einführung in die medizinische Bildverarbeitung SS 2013 Stephan Gimbel 1 Kurze Wiederholung Gradienten 1. und 2. Ableitung grad( f ( x, y) ) = f ( x, y) = f ( x, y) x f ( x, y) y 2 f ( x, y) = 2 f ( x,
Einführung in die medizinische Bildverarbeitung SS 2013 Stephan Gimbel 1 Kurze Wiederholung Gradienten 1. und 2. Ableitung grad( f ( x, y) ) = f ( x, y) = f ( x, y) x f ( x, y) y 2 f ( x, y) = 2 f ( x,
Debayeringverfahren. 19. Mai Thomas Noack, Nikolai Kosjar. SE Computational Photography - Debayeringverfahren
 Debayeringverfahren Thomas Noack, Nikolai Kosjar 19. Mai 2010 Was bisher geschah... Reduktion der Herstellungskosten durch Einsatz von nur noch einem CCD-Sensor mit Bayer-Filter Problem: Bayer Image Full
Debayeringverfahren Thomas Noack, Nikolai Kosjar 19. Mai 2010 Was bisher geschah... Reduktion der Herstellungskosten durch Einsatz von nur noch einem CCD-Sensor mit Bayer-Filter Problem: Bayer Image Full
Filter. Industrielle Bildverarbeitung, Vorlesung No M. O. Franz
 Filter Industrielle Bildverarbeitung, Vorlesung No. 5 1 M. O. Franz 07.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005. Übersicht 1 Lineare Filter 2 Formale
Filter Industrielle Bildverarbeitung, Vorlesung No. 5 1 M. O. Franz 07.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005. Übersicht 1 Lineare Filter 2 Formale
Grundlagen der Bildverarbeitung
 Grundlagen der Bildverarbeitung Inhaltsverzeichnis Vorwort 9 Kapitel 1 Einführung 13 1.1 Anwendungen der digitalen Bildverarbeitung 16 1.2 Algorithmische Verarbeitung von Bildinformation 17 1.3 Zu diesem
Grundlagen der Bildverarbeitung Inhaltsverzeichnis Vorwort 9 Kapitel 1 Einführung 13 1.1 Anwendungen der digitalen Bildverarbeitung 16 1.2 Algorithmische Verarbeitung von Bildinformation 17 1.3 Zu diesem
Modulprüfung Numerische Mathematik 1
 Prof. Dr. Klaus Höllig 18. März 2011 Modulprüfung Numerische Mathematik 1 Lösungen Aufgabe 1 Geben Sie (ohne Beweis an, welche der folgenden Aussagen richtig und welche falsch sind. 1. Die Trapezregel
Prof. Dr. Klaus Höllig 18. März 2011 Modulprüfung Numerische Mathematik 1 Lösungen Aufgabe 1 Geben Sie (ohne Beweis an, welche der folgenden Aussagen richtig und welche falsch sind. 1. Die Trapezregel
Bildverbesserung. Frequenz-, Punkt- und Maskenoperationen. Backfrieder-Hagenberg
 Bildverbesserung Frequenz-, Punkt- und Maskenoperationen Filtern im Frequenzraum Fouriertransformation f(x)->f( ) Filter-Multiplikation F =FxH Rücktransformation F ( )->f (x) local-domain frequency-domain
Bildverbesserung Frequenz-, Punkt- und Maskenoperationen Filtern im Frequenzraum Fouriertransformation f(x)->f( ) Filter-Multiplikation F =FxH Rücktransformation F ( )->f (x) local-domain frequency-domain
Grundlagen der Computer-Tomographie
 Grundlagen der Computer-Tomographie Quellenangabe Die folgenden Folien sind zum Teil dem Übersichtsvortrag: imbie.meb.uni-bonn.de/epileptologie/staff/lehnertz/ct1.pdf entnommen. Als Quelle für die mathematischen
Grundlagen der Computer-Tomographie Quellenangabe Die folgenden Folien sind zum Teil dem Übersichtsvortrag: imbie.meb.uni-bonn.de/epileptologie/staff/lehnertz/ct1.pdf entnommen. Als Quelle für die mathematischen
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Morphologische Operatoren Graphische DV und BV, Regina Pohle, 5. Morphologische Operatoren Einordnung in die Inhalte der Vorlesung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Morphologische Operatoren Graphische DV und BV, Regina Pohle, 5. Morphologische Operatoren Einordnung in die Inhalte der Vorlesung
Diskrete Signalverarbeitung und diskrete Systeme
 Diskrete Signalverarbeitung und diskrete Systeme Computer- basierte Verarbeitung von Signalen und Realisierung von Systemverhalten erfordern diskrete Signale und diskrete Systembeschreibungen. Wegen der
Diskrete Signalverarbeitung und diskrete Systeme Computer- basierte Verarbeitung von Signalen und Realisierung von Systemverhalten erfordern diskrete Signale und diskrete Systembeschreibungen. Wegen der
"Kanten- und Linienerkennung in Grauwertbildern für Bildverarbeitungsstufen im Antikollissionssystem des Faustfahrzeugs"
 "Kanten- und Linienerkennung in Grauwertbildern für Bildverarbeitungsstufen im Antikollissionssystem des Faustfahrzeugs" Ning Liu HAW-Hamburg Seminarvortrag December 15, 2006 Ning Liu Kanten- und Linienerkennung
"Kanten- und Linienerkennung in Grauwertbildern für Bildverarbeitungsstufen im Antikollissionssystem des Faustfahrzeugs" Ning Liu HAW-Hamburg Seminarvortrag December 15, 2006 Ning Liu Kanten- und Linienerkennung
Technische Universität München Fakultät für Informatik
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Proseminar: Grundlagen Bildverarbeitung/Bildverstehen Rückgewinnung/Restauration von Informationen Markus
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Proseminar: Grundlagen Bildverarbeitung/Bildverstehen Rückgewinnung/Restauration von Informationen Markus
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Regularisierung in Bildrekonstruktion und Bildrestaurierung
 Regularisierung in Bildrekonstruktion und Bildrestaurierung Ulli Wölfel 15. Februar 2002 1 Einleitung Gegeben seien Daten g(x, y), die Störungen enthalten. Gesucht ist das (unbekannte) Originalbild ohne
Regularisierung in Bildrekonstruktion und Bildrestaurierung Ulli Wölfel 15. Februar 2002 1 Einleitung Gegeben seien Daten g(x, y), die Störungen enthalten. Gesucht ist das (unbekannte) Originalbild ohne
Multimediale Werkzeuge 1, Audio-Berabeitung. normierte Frequenz (normiert auf die halbe Abtastrate, maximale Frequenz ist pi oder 1
 Multimediale Werkzeuge 1, Audio-Berabeitung normierte Frequenz (normiert auf die halbe Abtastrate, maximale Frequenz ist pi oder 1 Beachte: Teilbänder werden nach den Unter-Abtasten "aufgeblasen" (siehe
Multimediale Werkzeuge 1, Audio-Berabeitung normierte Frequenz (normiert auf die halbe Abtastrate, maximale Frequenz ist pi oder 1 Beachte: Teilbänder werden nach den Unter-Abtasten "aufgeblasen" (siehe
Motivation. Diskretisierung. Überblick. Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen. Diskretisierung und Quantisierung
 Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen Motivation Analoge Aufnahme von Sprache, Bildern Digitale Speicherung durch Diskretisierung + Quantisierung Informationsverlust
Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen Motivation Analoge Aufnahme von Sprache, Bildern Digitale Speicherung durch Diskretisierung + Quantisierung Informationsverlust
Übung: Computergrafik 1
 Prof. Dr. Andreas Butz Prof. Dr. Ing. Axel Hoppe Dipl.-Medieninf. Dominikus Baur Dipl.-Medieninf. Sebastian Boring Übung: Computergrafik 1 Fouriertransformation Organisatorisches Neue Abgabefrist für Blatt
Prof. Dr. Andreas Butz Prof. Dr. Ing. Axel Hoppe Dipl.-Medieninf. Dominikus Baur Dipl.-Medieninf. Sebastian Boring Übung: Computergrafik 1 Fouriertransformation Organisatorisches Neue Abgabefrist für Blatt
Technische Universität München. Fakultät für Informatik
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Thema: Filterung im Bildraum: Konvolution Proseminar: Grundlagen Bildverstehen/Bildgestaltung Jonas Zaddach
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik IX Thema: Filterung im Bildraum: Konvolution Proseminar: Grundlagen Bildverstehen/Bildgestaltung Jonas Zaddach
Übung: Computergrafik 1
 Prof. Dr. Andreas Butz Prof. Dr. Ing. Axel Hoppe Dipl.-Medieninf. Dominikus Baur Dipl.-Medieninf. Sebastian Boring Übung: Computergrafik 1 Filtern im Frequenzraum Segmentierung Organisatorisches Klausuranmeldung
Prof. Dr. Andreas Butz Prof. Dr. Ing. Axel Hoppe Dipl.-Medieninf. Dominikus Baur Dipl.-Medieninf. Sebastian Boring Übung: Computergrafik 1 Filtern im Frequenzraum Segmentierung Organisatorisches Klausuranmeldung
Bildverarbeitung. Fachschaftsrat Informatik. Professor Fuchs. Fragen TECHNISCHE UNIVERSITÄT DRESDEN. Unterteilung der Filter in Klassen
 Professor Fuchs Unterteilung der Filter in Klassen Wie erstellt man bei der Segmentierung objektumschreibende Formen? Eigenschaften der Zellkomplextopologie Was ist ein Histogramm? Wozu ist es gut? Unterschied
Professor Fuchs Unterteilung der Filter in Klassen Wie erstellt man bei der Segmentierung objektumschreibende Formen? Eigenschaften der Zellkomplextopologie Was ist ein Histogramm? Wozu ist es gut? Unterschied
Modul Digitale Bildverarbeitung SS16 Bestandteile der Lehrveranstaltung und Prüfung: Vorlesungen Übungsserien Praktika (ImageJ) bis Mai 2016 Projekt
 bis Mai 2016 Projekt") Modul Digitale Bildverarbeitung SS16 Bestandteile der Lehrveranstaltung und Prüfung: Vorlesungen Übungsserien Praktika (ImageJ) bis Mai 2016 Projekt im Juni 2016 Themen: Digitale Bilder, Eigenschaften
Modul Digitale Bildverarbeitung SS16 Bestandteile der Lehrveranstaltung und Prüfung: Vorlesungen Übungsserien Praktika (ImageJ) bis Mai 2016 Projekt im Juni 2016 Themen: Digitale Bilder, Eigenschaften
2D Graphik: Bildverbesserung. Vorlesung 2D Graphik Andreas Butz, Otmar Hilliges Freitag, 2. Dezember 2005
 2D Graphik: Bildverbesserung Vorlesung 2D Graphik Andreas Butz, Otmar Hilliges Freitag, 2. Dezember 2005 Themen heute Rauschen, Entropie Bildverbesserung Punktbasiert Flächenbasiert Kantenbasiert Was ist
2D Graphik: Bildverbesserung Vorlesung 2D Graphik Andreas Butz, Otmar Hilliges Freitag, 2. Dezember 2005 Themen heute Rauschen, Entropie Bildverbesserung Punktbasiert Flächenbasiert Kantenbasiert Was ist
Farbmomente. Christoph Sommer Seminar Inhaltsbasierte Bildsuche
 Farbmomente Seminar Inhaltsbasierte Bildsuche Farbmomente Einleitung und Motivation Statistische Momente Geometrische Momente Macht der Momente Hu-Momente Orthogonale Basen für Momente Generalisierte Farbmomente
Farbmomente Seminar Inhaltsbasierte Bildsuche Farbmomente Einleitung und Motivation Statistische Momente Geometrische Momente Macht der Momente Hu-Momente Orthogonale Basen für Momente Generalisierte Farbmomente
Mathematischer Vorkurs für Physiker WS 2012/13
 TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13 Übungsblatt 2 Wichtige Formeln aus der Vorlesung: Basisaufgaben Beispiel 1: 1 () grad () = 2 (). () () = ( 0 ) + grad ( 0 ) ( 0 )+
TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13 Übungsblatt 2 Wichtige Formeln aus der Vorlesung: Basisaufgaben Beispiel 1: 1 () grad () = 2 (). () () = ( 0 ) + grad ( 0 ) ( 0 )+
EVC Repetitorium Blender
 EVC Repetitorium Blender Michael Hecher Felix Kreuzer Institute of Computer Graphics and Algorithms Vienna University of Technology INSTITUTE OF COMPUTER GRAPHICS AND ALGORITHMS Filter Transformationen
EVC Repetitorium Blender Michael Hecher Felix Kreuzer Institute of Computer Graphics and Algorithms Vienna University of Technology INSTITUTE OF COMPUTER GRAPHICS AND ALGORITHMS Filter Transformationen
10. Übung zur Linearen Algebra II -
 0. Übung zur Linearen Algebra II - Lösungen Kommentare an Hannes.Klarner@Fu-Berlin.de FU Berlin. SS 00. Aufgabe 7 Der ( linearen ) Abbildung ϕ : R R sei bzgl. der kanonischen Basis die Matrix zugeordnet.
0. Übung zur Linearen Algebra II - Lösungen Kommentare an Hannes.Klarner@Fu-Berlin.de FU Berlin. SS 00. Aufgabe 7 Der ( linearen ) Abbildung ϕ : R R sei bzgl. der kanonischen Basis die Matrix zugeordnet.
Fortgeschrittene Mathematik Raum und Funktionen
 Fortgeschrittene Mathematik Raum und Funktionen Thomas Zehrt Universität Basel WWZ Thomas Zehrt (Universität Basel WWZ) R n und Funktionen 1 / 33 Outline 1 Der n-dimensionale Raum 2 R 2 und die komplexen
Fortgeschrittene Mathematik Raum und Funktionen Thomas Zehrt Universität Basel WWZ Thomas Zehrt (Universität Basel WWZ) R n und Funktionen 1 / 33 Outline 1 Der n-dimensionale Raum 2 R 2 und die komplexen
1. Bildverbesserung / Bildvorverarbeitung
 1. Bildverbesserung / Bildvorverarbeitung Bildverbesserung ist problemorientiert für menschliche/maschinelle Interpretation Dominanz zwischen Farbe, Textur, Kontext Ziel der ikonischen Bildauswertung:
1. Bildverbesserung / Bildvorverarbeitung Bildverbesserung ist problemorientiert für menschliche/maschinelle Interpretation Dominanz zwischen Farbe, Textur, Kontext Ziel der ikonischen Bildauswertung:
Grundlagen der Bildverarbeitung Klaus D. Tönnies
 Grundlagen der Bildverarbeitung Klaus D. Tönnies ein Imprint von Pearson Education München Boston San Francisco Harlow, England Don Mills, Ontario Sydney Mexico City Madrid Amsterdam Grundlagen der Bildverarbeitung
Grundlagen der Bildverarbeitung Klaus D. Tönnies ein Imprint von Pearson Education München Boston San Francisco Harlow, England Don Mills, Ontario Sydney Mexico City Madrid Amsterdam Grundlagen der Bildverarbeitung
Partielle Ableitungen, Gradient, Lineare Näherung, Extrema, Fehlerfortpflanzung
 Partielle Ableitungen, Gradient, Lineare Näherung, Extrema, Fehlerfortpflanzung Jörn Loviscach Versionsstand: 29. Juni 2009, 18:41 1 Partielle Ableitungen, Gradient Die Ableitung einer Funktion f an einer
Partielle Ableitungen, Gradient, Lineare Näherung, Extrema, Fehlerfortpflanzung Jörn Loviscach Versionsstand: 29. Juni 2009, 18:41 1 Partielle Ableitungen, Gradient Die Ableitung einer Funktion f an einer
Elementare Bildverarbeitungsoperationen
 1 Elementare Bildverarbeitungsoperationen - Kantenerkennung - 1 Einführung 2 Gradientenverfahren 3 Laplace-Verfahren 4 Canny-Verfahren 5 Literatur 1 Einführung 2 1 Einführung Kantenerkennung basiert auf
1 Elementare Bildverarbeitungsoperationen - Kantenerkennung - 1 Einführung 2 Gradientenverfahren 3 Laplace-Verfahren 4 Canny-Verfahren 5 Literatur 1 Einführung 2 1 Einführung Kantenerkennung basiert auf
BV in Frequenzbereich
 Bilderarbeitng ZHAW BV HS7 M. Thaler BV in Freqenzbereich Freqency omain M. Thaler TG8 tham@zhaw.ch Jni 7 Um was geht es? Periodische Störngen z.b. Afnahmesystem Scanner Übertragngstörngen etc. wie lassen
Bilderarbeitng ZHAW BV HS7 M. Thaler BV in Freqenzbereich Freqency omain M. Thaler TG8 tham@zhaw.ch Jni 7 Um was geht es? Periodische Störngen z.b. Afnahmesystem Scanner Übertragngstörngen etc. wie lassen
Folgerungen aus dem Auflösungsatz
 Folgerungen aus dem Auflösungsatz Wir haben in der Vorlesung den Satz über implizite Funktionen (Auflösungssatz) kennen gelernt. In unserer Formulierung lauten die Resultate: Seien x 0 R m, y 0 R n und
Folgerungen aus dem Auflösungsatz Wir haben in der Vorlesung den Satz über implizite Funktionen (Auflösungssatz) kennen gelernt. In unserer Formulierung lauten die Resultate: Seien x 0 R m, y 0 R n und
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Bildpunkt auf dem Gitter: Pixel (picture element) (manchmal auch Pel)
 (manchmal auch Pel)") 4. Digitalisierung und Bildoperationen 4.1 Digitalisierung (Sampling, Abtastung) Rasterung auf 2D-Bildmatrix mathematisch: Abb. einer 2-dim. Bildfunktion mit kontinuierlichem Definitionsbereich auf digitales
4. Digitalisierung und Bildoperationen 4.1 Digitalisierung (Sampling, Abtastung) Rasterung auf 2D-Bildmatrix mathematisch: Abb. einer 2-dim. Bildfunktion mit kontinuierlichem Definitionsbereich auf digitales
Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.2/29
 Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
INTELLIGENTE DATENANALYSE IN MATLAB
 INTELLIGENTE DATENANALYSE IN MATLAB Bildanalyse Literatur David A. Forsyth: Computer Vision i A Modern Approach. Mark S. Nixon und Alberto S. Aguado: Feature Extraction and Image Processing. Ulrich Schwanecke:
INTELLIGENTE DATENANALYSE IN MATLAB Bildanalyse Literatur David A. Forsyth: Computer Vision i A Modern Approach. Mark S. Nixon und Alberto S. Aguado: Feature Extraction and Image Processing. Ulrich Schwanecke:
Folien zur Vorlesung Mathematik Plus: Ergänzugen Mathematik I
 Bachelor Informatik Mathematik Plus Titel Folien zur Vorlesung Mathematik Plus: Ergänzugen Mathematik I Hochschule Stralsund Fakultät Elektrotechnik und Informatik Prof. Dr. W. Kampowsky Bachelor Informatik
Bachelor Informatik Mathematik Plus Titel Folien zur Vorlesung Mathematik Plus: Ergänzugen Mathematik I Hochschule Stralsund Fakultät Elektrotechnik und Informatik Prof. Dr. W. Kampowsky Bachelor Informatik
Vorlesung: Analysis II für Ingenieure. Wintersemester 07/08. Michael Karow. Themen: Niveaumengen und Gradient
 Vorlesung: Analysis II für Ingenieure Wintersemester 07/08 Michael Karow Themen: Niveaumengen und Gradient Wir betrachten differenzierbare reellwertige Funktionen f : R n G R, G offen Zur Vereinfachung
Vorlesung: Analysis II für Ingenieure Wintersemester 07/08 Michael Karow Themen: Niveaumengen und Gradient Wir betrachten differenzierbare reellwertige Funktionen f : R n G R, G offen Zur Vereinfachung
Computer Vision: Optische Flüsse
 Computer Vision: Optische Flüsse D. Schlesinger TUD/INF/KI/IS Bewegungsanalyse Optischer Fluss Lokale Verfahren (Lukas-Kanade) Globale Verfahren (Horn-Schunck) (+ kontinuierliche Ansätze: mathematische
Computer Vision: Optische Flüsse D. Schlesinger TUD/INF/KI/IS Bewegungsanalyse Optischer Fluss Lokale Verfahren (Lukas-Kanade) Globale Verfahren (Horn-Schunck) (+ kontinuierliche Ansätze: mathematische
Audio-Bearbeitung. Diese Freq. Anteile «verschwinden» nach dem unterabtasten Filter muß schmal genug sein! Nach Unterabtastung
 Audio Signal Audio-Bearbeitung Ampl Vor Unterabtastung Teilband Grenzen Normierte Frequenz (normierte Abtastrate, maximale Frequenz ist pi oder 1) Teilbänder Diese Freq. Anteile «verschwinden» nach dem
Audio Signal Audio-Bearbeitung Ampl Vor Unterabtastung Teilband Grenzen Normierte Frequenz (normierte Abtastrate, maximale Frequenz ist pi oder 1) Teilbänder Diese Freq. Anteile «verschwinden» nach dem
Warum z-transformation?
 -Transformation Warum -Transformation? Die -Transformation führt Polynome und rationale Funktionen in die Analyse der linearen eitdiskreten Systeme ein. Die Faltung geht über in die Multiplikation von
-Transformation Warum -Transformation? Die -Transformation führt Polynome und rationale Funktionen in die Analyse der linearen eitdiskreten Systeme ein. Die Faltung geht über in die Multiplikation von
4. Segmentierung von Objekten Video - Inhaltsanalyse
 4. Segmentierung von Objekten Video - Inhaltsanalyse Stephan Kopf Inhalt Vorgehensweise Berechnung der Kamerabewegungen zwischen beliebigen Bildern Transformation eines Bildes Hintergrundbilder / Panoramabilder
4. Segmentierung von Objekten Video - Inhaltsanalyse Stephan Kopf Inhalt Vorgehensweise Berechnung der Kamerabewegungen zwischen beliebigen Bildern Transformation eines Bildes Hintergrundbilder / Panoramabilder
Datenaquisition. Verstärker Filter. Sensor ADC. Objekt. Rechner
 Datenaquisition Sensor Verstärker Filter ADC Objekt Rechner Datenaquisition Verstärker: - linearer Arbeitsbereich - linearer Frequenzgang - Vorkehrungen gegen Übersteuerung (trends, shot noise) - Verstärkerrauschen
Datenaquisition Sensor Verstärker Filter ADC Objekt Rechner Datenaquisition Verstärker: - linearer Arbeitsbereich - linearer Frequenzgang - Vorkehrungen gegen Übersteuerung (trends, shot noise) - Verstärkerrauschen
Bildverarbeitung: Fourier-Transformation. D. Schlesinger () BV: Fourier-Transformation 1 / 16
 BV: Fourier-Transformation 1 / 16") Bildverarbeitung: Fourier-Transformation D. Schlesinger () BV: Fourier-Transformation 1 / 16 Allgemeines Bilder sind keine Vektoren. Bilder sind Funktionen x : D C (Menge der Pixel in die Menge der Farbwerte).
Bildverarbeitung: Fourier-Transformation D. Schlesinger () BV: Fourier-Transformation 1 / 16 Allgemeines Bilder sind keine Vektoren. Bilder sind Funktionen x : D C (Menge der Pixel in die Menge der Farbwerte).
Nichtmonotone Grauwertabbildung
 LMU München Medieninformatik Butz/Hilliges 2D Graphics WS2005 02.12.2005 Folie 1 Nichtmonotone Grauwertabbildung Zwei Grauwertfenster in einem Bild. g (g) 0 511 2100 g Erzeugt künstliche Kanten. Grenzen
LMU München Medieninformatik Butz/Hilliges 2D Graphics WS2005 02.12.2005 Folie 1 Nichtmonotone Grauwertabbildung Zwei Grauwertfenster in einem Bild. g (g) 0 511 2100 g Erzeugt künstliche Kanten. Grenzen
- Sei r(x,y) Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.
 Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.") Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Mathematik für Anwender II
 Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 49 Zu einer reellwertigen Funktion Extrema auf einer offenen Menge G R n interessieren wir uns, wie schon bei einem eindimensionalen
Prof. Dr. H. Brenner Osnabrück SS 2012 Mathematik für Anwender II Vorlesung 49 Zu einer reellwertigen Funktion Extrema auf einer offenen Menge G R n interessieren wir uns, wie schon bei einem eindimensionalen
Vorlesung: Analysis II für Ingenieure. Wintersemester 09/10. Michael Karow. Themen: Taylor-Entwicklung und lokale Extrema
 Vorlesung: Analysis II für Ingenieure Wintersemester 09/10 Michael Karow Themen: Taylor-Entwicklung und lokale Extrema Motivierendes Beispiel: die Funktion f(x, y) = x(x 1) 2 2 y 2. Dieselbe Funktion von
Vorlesung: Analysis II für Ingenieure Wintersemester 09/10 Michael Karow Themen: Taylor-Entwicklung und lokale Extrema Motivierendes Beispiel: die Funktion f(x, y) = x(x 1) 2 2 y 2. Dieselbe Funktion von
Umkehrfunktion. g (y) = f (x) 1, x = g(y), Umkehrfunktion 1-1
 = f (x) 1, x = g(y), Umkehrfunktion 1-1") Umkehrfunktion Ist für eine stetig differenzierbare n-variate Funktion f : D R n die Jacobi-Matrix f (x ) für einen Punkt x im Innern des Definitionsbereiches D R n nicht singulär, so ist f lokal invertierbar,
Umkehrfunktion Ist für eine stetig differenzierbare n-variate Funktion f : D R n die Jacobi-Matrix f (x ) für einen Punkt x im Innern des Definitionsbereiches D R n nicht singulär, so ist f lokal invertierbar,
3 Trend- und Saisonkomponenten
 3 Trend- und Saisonkomponenten Schritte bei der Analyse von Zeitreihendaten : Plot ; Identifikation von Strukturbrüchen, Ausreißern etc. ; Modellansatz, z.b. klassisches Komponentenmodell X t = m t + s
3 Trend- und Saisonkomponenten Schritte bei der Analyse von Zeitreihendaten : Plot ; Identifikation von Strukturbrüchen, Ausreißern etc. ; Modellansatz, z.b. klassisches Komponentenmodell X t = m t + s
MATHEMATIK 2 FÜR DIE STUDIENGÄNGE CHE- MIE UND LEBENSMITTELCHEMIE
 Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik MATHEMATIK 2 FÜR DIE STUDIENGÄNGE CHE- MIE UND LEBENSMITTELCHEMIE Differentialrechnung für Funktionen mehrerer
Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik MATHEMATIK 2 FÜR DIE STUDIENGÄNGE CHE- MIE UND LEBENSMITTELCHEMIE Differentialrechnung für Funktionen mehrerer
3. Analyse der Kamerabewegung Video - Inhaltsanalyse
 3. Analyse der Kamerabewegung Video - Inhaltsanalyse Stephan Kopf Bewegungen in Videos Objektbewegungen (object motion) Kameraoperationen bzw. Kamerabewegungen (camera motion) Semantische Informationen
3. Analyse der Kamerabewegung Video - Inhaltsanalyse Stephan Kopf Bewegungen in Videos Objektbewegungen (object motion) Kameraoperationen bzw. Kamerabewegungen (camera motion) Semantische Informationen
Analysis II. 8. Klausur mit Lösungen
 Fachbereich Mathematik/Informatik Prof. Dr. H. Brenner Analysis II 8. Klausur mit en 1 2 Aufgabe 1. Definiere die folgenden kursiv gedruckten) Begriffe. 1) Eine Metrik auf einer Menge M. 2) Die Kurvenlänge
Fachbereich Mathematik/Informatik Prof. Dr. H. Brenner Analysis II 8. Klausur mit en 1 2 Aufgabe 1. Definiere die folgenden kursiv gedruckten) Begriffe. 1) Eine Metrik auf einer Menge M. 2) Die Kurvenlänge
Einführung in Quantitative Methoden
 in Quantitative Methoden Mag. Dipl.Ing. Dr. Pantelis Christodoulides & Mag. Dr. Karin Waldherr SS 2011 Christodoulides / Waldherr in Quantitative Methoden- 2.VO 1/47 Historisches Regression geht auf Galton
in Quantitative Methoden Mag. Dipl.Ing. Dr. Pantelis Christodoulides & Mag. Dr. Karin Waldherr SS 2011 Christodoulides / Waldherr in Quantitative Methoden- 2.VO 1/47 Historisches Regression geht auf Galton
Tracking. Einführung. Allgemeiner Systemaufbau. Objektlokalisation: Template-Matching. Prädiktionsfilter: Kalman
 Tracking Einführung Allgemeiner Systemaufbau Objektlokalisation: Template-Matching Prädiktionsfilter: Kalman Birgit Möller & Denis Williams AG Bioinformatik & Mustererkennung Institut für Informatik Martin-Luther-Universität
Tracking Einführung Allgemeiner Systemaufbau Objektlokalisation: Template-Matching Prädiktionsfilter: Kalman Birgit Möller & Denis Williams AG Bioinformatik & Mustererkennung Institut für Informatik Martin-Luther-Universität
Dekonvolution von Omnikamerabildern
 1 / 23 Dekonvolution von Omnikamerabildern Tobias Börtitz, Hermann Lorenz, Lutz Krätzer, Josef Söntgen Betreuer: Richard Schmidt HTW Dresden, Deutschland Abschluß Präsentation 15. Februar 2012 2 / 23 1
1 / 23 Dekonvolution von Omnikamerabildern Tobias Börtitz, Hermann Lorenz, Lutz Krätzer, Josef Söntgen Betreuer: Richard Schmidt HTW Dresden, Deutschland Abschluß Präsentation 15. Februar 2012 2 / 23 1
Mathematik. für das Ingenieurstudium. 10 Funktionen mit mehreren Variablen. Jürgen Koch Martin Stämpfle.
 10 Funktionen mit mehreren Variablen www.mathematik-fuer-ingenieure.de 2010 und, Esslingen Dieses Werk ist urheberrechtlich geschützt. Alle Rechte, auch die der Übersetzung, des Nachdruckes und der Vervielfältigung
10 Funktionen mit mehreren Variablen www.mathematik-fuer-ingenieure.de 2010 und, Esslingen Dieses Werk ist urheberrechtlich geschützt. Alle Rechte, auch die der Übersetzung, des Nachdruckes und der Vervielfältigung
3 Trend- und Saisonkomponenten
 3 Trend- und Saisonkomponenten Schritte bei der Analyse von Zeitreihendaten : Plot ; Identifikation von Strukturbrüchen, Ausreißern etc. ; Modellansatz, z.b. klassisches Komponentenmodell X t = m t + s
3 Trend- und Saisonkomponenten Schritte bei der Analyse von Zeitreihendaten : Plot ; Identifikation von Strukturbrüchen, Ausreißern etc. ; Modellansatz, z.b. klassisches Komponentenmodell X t = m t + s
Segmentierung. Vorlesung FH-Hagenberg SEM
 Segmentierung Vorlesung FH-Hagenberg SEM Segmentierung: Definition Die Pixel eines Bildes A={a i }, i=1:n, mit N der Anzahl der Pixel, werden in Teilmengen S i unterteilt. Die Teilmengen sind disjunkt
Segmentierung Vorlesung FH-Hagenberg SEM Segmentierung: Definition Die Pixel eines Bildes A={a i }, i=1:n, mit N der Anzahl der Pixel, werden in Teilmengen S i unterteilt. Die Teilmengen sind disjunkt
Prüfungsvorbereitungskurs Höhere Mathematik 3
 Prüfungsvorbereitungskurs Höhere Mathematik 3 Gewöhnliche Differentialgleichungen Marco Boßle Jörg Hörner Mathematik Online Frühjahr 2011 PV-Kurs HM 3 Gew. DGl 1-1 Zusammenfassung y (x) = F (x, y) Allgemeine
Prüfungsvorbereitungskurs Höhere Mathematik 3 Gewöhnliche Differentialgleichungen Marco Boßle Jörg Hörner Mathematik Online Frühjahr 2011 PV-Kurs HM 3 Gew. DGl 1-1 Zusammenfassung y (x) = F (x, y) Allgemeine
i j m f(y )h i h j h m
h i h j h m") 10 HÖHERE ABLEITUNGEN UND ANWENDUNGEN 56 Speziell für k = 2 ist also f(x 0 + H) = f(x 0 ) + f(x 0 ), H + 1 2 i j f(x 0 )h i h j + R(X 0 ; H) mit R(X 0 ; H) = 1 6 i,j,m=1 i j m f(y )h i h j h m und passendem
10 HÖHERE ABLEITUNGEN UND ANWENDUNGEN 56 Speziell für k = 2 ist also f(x 0 + H) = f(x 0 ) + f(x 0 ), H + 1 2 i j f(x 0 )h i h j + R(X 0 ; H) mit R(X 0 ; H) = 1 6 i,j,m=1 i j m f(y )h i h j h m und passendem
7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012)
") Technische Universität München Zentrum Mathematik, M1 Prof. Dr. Boris Vexler Dr. Ira Neitzel Dipl.-Math. Alana Kirchner 7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012) Diese Auswahl
Technische Universität München Zentrum Mathematik, M1 Prof. Dr. Boris Vexler Dr. Ira Neitzel Dipl.-Math. Alana Kirchner 7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012) Diese Auswahl
Mathematik für Wirtschaftswissenschaftler
 Mathematik für Wirtschaftswissenschaftler Yves Schneider Universität Luzern Frühjahr 2016 Repetition Kapitel 1 bis 3 2 / 54 Repetition Kapitel 1 bis 3 Ausgewählte Themen Kapitel 1 Ausgewählte Themen Kapitel
Mathematik für Wirtschaftswissenschaftler Yves Schneider Universität Luzern Frühjahr 2016 Repetition Kapitel 1 bis 3 2 / 54 Repetition Kapitel 1 bis 3 Ausgewählte Themen Kapitel 1 Ausgewählte Themen Kapitel
Inhaltsverzeichnis. Kapitel 1: Rechnen mit Zahlen. Kapitel 2: Umformen von Ausdrücken. Kapitel 3: Gleichungen, Ungleichungen, Gleichungssysteme
 Kapitel 1: Rechnen mit Zahlen 1.1 Rechnen mit reellen Zahlen 1.2 Berechnen von Summen und Produkten 1.3 Primfaktorzerlegung 1.4 Größter gemeinsamer Teiler 1.5 Kleinstes gemeinsames Vielfaches 1.6 n-te
Kapitel 1: Rechnen mit Zahlen 1.1 Rechnen mit reellen Zahlen 1.2 Berechnen von Summen und Produkten 1.3 Primfaktorzerlegung 1.4 Größter gemeinsamer Teiler 1.5 Kleinstes gemeinsames Vielfaches 1.6 n-te
Extremwerte von Funktionen mehrerer reeller Variabler
 Extremwerte von Funktionen mehrerer reeller Variabler Bei der Bestimmung der Extrema von (differenzierbaren) Funktionen f : R n R ist es sinnvoll, zuerst jene Stellen zu bestimmen, an denen überhaupt ein
Extremwerte von Funktionen mehrerer reeller Variabler Bei der Bestimmung der Extrema von (differenzierbaren) Funktionen f : R n R ist es sinnvoll, zuerst jene Stellen zu bestimmen, an denen überhaupt ein
Numerisches Programmieren, Übungen
 Technische Universität München SS 2012 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Alexander Breuer Dr.-Ing. Markus Kowarschik Numerisches Programmieren,
Technische Universität München SS 2012 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Alexander Breuer Dr.-Ing. Markus Kowarschik Numerisches Programmieren,
Praktikum-Meßtechnik Verfasser: Dr. H. Bergelt
 TU Bergakademie Freiberg Praktikum-Meßtechnik Verfasser: Dr. H. Bergelt Filter in der Bildverarbeitung. Einleitung Digitale Filter gehören zu den wirkungsvollsten Methoden der Bildverarbeitung. Wir können
TU Bergakademie Freiberg Praktikum-Meßtechnik Verfasser: Dr. H. Bergelt Filter in der Bildverarbeitung. Einleitung Digitale Filter gehören zu den wirkungsvollsten Methoden der Bildverarbeitung. Wir können
SEMINAR COMPUTATIONAL PHOTOGRAPHY
 Beseitigung von Bewegungsunschärfe Oliver Kelling, Mirco Menze SEMINAR COMPUTATIONAL PHOTOGRAPHY 1 Einführung Milderung bzw. Vermeidung von Unschärfe durch: 1. Kürze Belichtungszeiten 2. Stabilisierende
Beseitigung von Bewegungsunschärfe Oliver Kelling, Mirco Menze SEMINAR COMPUTATIONAL PHOTOGRAPHY 1 Einführung Milderung bzw. Vermeidung von Unschärfe durch: 1. Kürze Belichtungszeiten 2. Stabilisierende
Computer Vision: Optische Flüsse
 Computer Vision: Optische Flüsse D. Schlesinger TUD/INF/KI/IS Bewegungsanalyse Optischer Fluss Lokale Verfahren (Lukas-Kanade) Globale Verfahren (Horn-Schunck) (+ kontinuierliche Ansätze: mathematische
Computer Vision: Optische Flüsse D. Schlesinger TUD/INF/KI/IS Bewegungsanalyse Optischer Fluss Lokale Verfahren (Lukas-Kanade) Globale Verfahren (Horn-Schunck) (+ kontinuierliche Ansätze: mathematische
Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen
 Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen Rekonstruktion kontinuierlicher Daten Interpolation multivariater Daten Ulrich Rüde Lehrstuhl für Systemsimulation Sommersemester
Algorithmik III Algorithmen und Modelle für kontinuierliche Datenstrukturen Rekonstruktion kontinuierlicher Daten Interpolation multivariater Daten Ulrich Rüde Lehrstuhl für Systemsimulation Sommersemester
Grundlagen der Videotechnik, Farbe 2
 Grundlagen der Videotechnik, Farbe 2 1 Beispiel für additive Farbmischung: Aus: O. Limann: Fernsetechnik ohne Ballast, Franzis Verlag 2 Veranschaulichung Farbe, Farbkomponenten Aus: O. Limann: Fernsetechnik
Grundlagen der Videotechnik, Farbe 2 1 Beispiel für additive Farbmischung: Aus: O. Limann: Fernsetechnik ohne Ballast, Franzis Verlag 2 Veranschaulichung Farbe, Farbkomponenten Aus: O. Limann: Fernsetechnik