Gliederung: 1) Einleitung 2) Oberflächenvergleich 3) Objekterkennung
|
|
|
- Ralf Küchler
- vor 6 Jahren
- Abrufe
Transkript
1 Using Spin Images for Efficient Object Recogition in Cluttered 3D Scenes (Effiziente Objekterkennung von ungeordneten 3D Szenen mithilfe von Spin Images) Gliederung: 1) Einleitung 2) Oberflächenvergleich 3) Objekterkennung 1


2 1. Einleitung Ziel: gleichzeitige Erkennung von mehreren Objekten in einer 3D Szene, wobei die Objekte in einer Art Bibliothek gespeichert sind Funktionsweise: Erkennung basiert auf erkannten Oberflächen und darauf bekannten Punkten ist die Oberfläche erkannt in der Szene, kann eine Beziehung zwischen einem bekannten Objekt und etwas unbekannten der Szene hergestellt werden, um Informationen über die Szene zu erhalten 2
3 1. Einleitung Wozu wird es benötigt: Oberflächenerkennung ist eine Technik aus der 3D Welt, die in der Automation und bei Robotern Anwendungen findet Was benötigt man dazu? Sensor, der die Objekte abtastet und die 3D Punkte erzeugt Formrepräsentation, um die Informationen über die 3D Punkte effizient zu speichern Koordinatensysteme, in dem die Daten beschrieben werden 2D Abbildungen Formrepräsentation: Existenz verschiedenster Arten von Formrepräsentationen: verschiedene Achsen Anzahl der Parameter, die zur Beschreibung der Basiselemente genutzt werden (planare Objekte haben viele Basiselemente mit wenigen Parametern zylindrische Objekte haben wenige Basiselemente mit vielen Parametern) Gauß Abbildungen für kugelige Objekte Vielzahl an Formrepräsentationen, noch kein Konsens über die beste 3
4 1. Einleitung Koordinatensysteme: Sichten zentriertes Koordinatensystem Beschreibung der Oberflächendaten in Bezug auf das Koordinatensystem, abhängig von der Sicht auf die Oberfläche + einfach zu berechnen - bevor verglichen werden kann, ändert sich die Beschreibung der Oberfläche, da die sie eventuell noch transformiert werden muss - bei mehreren Sichten muss für jede Sicht eine separate Oberfläche gespeichert werden Objekt zentriertes Koordinatensystem Beschreibung der Oberfläche erfolgt in einem Koordinatensystem, das mit dem Objekt fixiert ist + Sichten unabhängig + lassen sich direkt vergleichen + kompakter, da alle Sichten in einer Oberflächenbeschreibung beschrieben sind 4

5 1. Einleitung 2D Abbildungen: werden zu einer lokalen Basis eines orientierten Punktes an der Oberfläche eines Objektes erstellt 3D Punkt mit Oberflächennormalen Beschreibung mit nur noch 2 Parametern wird in einem 2D Histogramm erstellt enthält Koordinaten von Punkten der Oberfläche in Bezug auf eine örtliche Basis Globale Beschreibung der Form des Objektes und unveränderlich zu starren Transformationen Was sind Spin Images? genaue Beschreibung in Doktorarbeit von Andrew E. Johnson Kurzbeschreibung: Darstellung ist ein Array von Variablen Name Spin: Bilderzeugung vorstellbar wie ein Blatt, das um die Normale eines Punktes gedreht wird + Lokalisierung der Spin Images bei Reduzierung der Erzeugungsparameter ermöglicht Oberflächenerkennung von Durcheinander und Überdeckung + große Anzahl der Spin Images sind redundant statistische Analyse zur Reduzierung und damit Beschleunigung der Erkennung 5

6 2. Oberflächenerkennung Spin Images Erzeugung 3D Punkt mit Richtung orientierter Punkt Definition eines orientierten Punktes an einem Punkt des Oberflächengitternetzes Berechnung der Normalen teilweise Definition eines Objekt zentrierten Koordinatensystems Definition von 2 Koordinaten: Höhenkoordinate a Strahlenkoordinate ß, definiert als senkrechtem Abstand durch die Normale Erstellung eines 2D Indexes mit a und ß Koordinaten (a und ß) eines Oberflächenpunktes in einem Oberflächenpolygon werden berechnet Wiederholung der Prozedur, bis alle Poygoneckpunkte im Spin Image kann als Abbildung gedacht werden dunkle Teile entsprechen Bereiche mit vielen Punkten Spin Images ein und des selben Objektes werden ähnlich sein, aber nie gleich, da nur eine zufällige Auswahl an Punkten genutzt wird 6
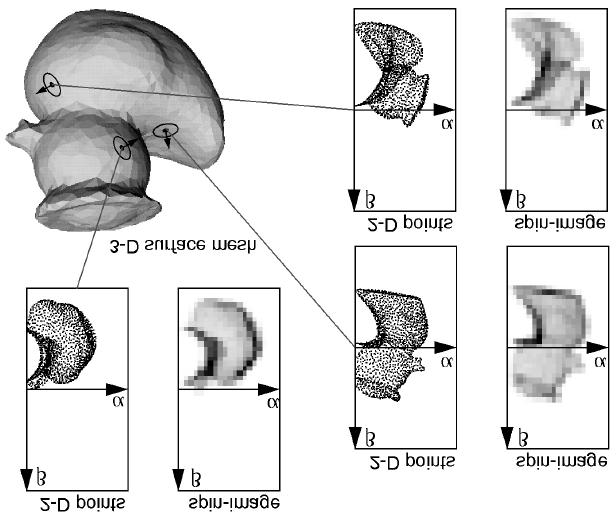
7 2. Oberflächenerkennung 7

8 2. Oberflächenerkennung Parameter zur Spin Images Erzeugung geometrische Breite die Auflösung der Spin Images Beeinflussung der Größe bei Speicherung Effekt auf die Beschreibbarkeit wird in einem Vielfachen der Auflösung der Oberflächennetzpolygone angegeben möglich, da Polygonauflösung mit der Größe der Größe der Formmerkmalen und der Dichte der Punkte und den Polygonen in Relation steht 4 mal so groß beschreibt das Modell nicht wirklich (a) 1 4 mal so groß zu genaue Beschreibung; Platzverschwendung (c) Genau so groß idealer Mittelweg (b) 8
9 2. Oberflächenerkennung Parameter zur Spin Images Erzeugung Bildbreite entspricht der Fensterbreite bei 2D Bildern Nach Tests: in etwa so groß setzten wie die breite des Modells (a) 40 Pixel (b) 20 Pixel und (c) 10 Pixel breit 9

10 2. Oberflächenerkennung Parameter zur Spin Images Erzeugung Support Distance (DS) Bildbreite * geometrische Breite bestimmt den Speicherplatz, den das Spin Image belegt 10
 < AS ist wird genutzt, um die Auswirkungen des Durcheinander einzugrenzen (a) 180,")
11 2. Oberflächenerkennung Parameter zur Spin Images Erzeugung Support Angle (AS) Maximalwinkel zwischen der Richtung der orientierten Punktbasis und der Oberflächennormalwertes der Punkte Bsp: Punkte A und B mit der Position und Normalen pa und pb sowie na und nb B wird ins Spin Image aufgenommen, wenn a cos(na nb ) < AS ist wird genutzt, um die Auswirkungen des Durcheinander einzugrenzen (a) 180, (b) 90 und (c) 60 AS DS und AS haben Auswirkungen auf die Anzahl der Punkte, die in der Szene genutzt werden; je größer diese ist, desto ungenauer wird die Erkennung, da mehr Punkte genutzt werden, die gar nicht zum Objekt gehören 11
12 2. Oberflächenerkennung Oberflächenvergleichsverfahren Berechnung des Korellationskoeffizienten mit Spin Images von Punkten der anderen Oberfläche bevor verglichen wird, werden alle Spin Images des Modells erstellt zufällige Auswahl von Punkten des Polygonnetzes und Berechnung der Spin Images Erstellung einer Punktkorrespondenz zwischen dem Punkt und dem am besten passenden Punkt der anderen Oberfläche Wiederholung bis eine große Anzahl an Punkten untersucht wurden Punkte werden gruppiert und Ausreißer entfernt Vergleich mithilfe eines modifizierten iterativen closed point Algorithmus Vergleich mit der größten Überdeckung wird ermittelt 12
13 3. Objekterkennung 13
14 3. Objekterkennung jedes Modell ist in der Bibliothek als Polygonmodell gespeichert vor der Erkennung werden Spin Images für alle Ansichten erzeugt und gespeichert während der Erkennung wird ein Punkt der Szene ausgewählt und dessen Spin Image berechnet errechnetes Spin Image wird mit allen Spin Images aller Modell verglichen das am besten passende Spin Image zeigt das am besten passende Modell und die am besten passende Polygonecke nach Vergleich vieler Spin Images werden korrespondierende Punkte an den Oberflächenvergleichsalgorithmus übergeben ineffiziente Erkennung: jeder Vergleich benötigt eine Beziehung von 2 Spin Images eine Operation der Größenordnung der relativ der Größe der Arrays der Spin Images ist unakzeptable Verarbeitungsgeschwindigkeit zur Erkennung einer großen Anzahl an Modellen Spin Images können komprimiert werden höhere Geschwindigkeit 14

15 3. Objekterkennung Spin Images Kompression Spin Images von Punkten die nahe beieinander liegen, ähneln sich sehr bei Oberflächensymmetrie: Punkte die auf gegenüberliegenden Seiten des Objektes liegen in Beziehungen gebracht werden Beziehung zwischen Punkten kann genutzt werden, um Spin Images mittels Bildkompression komprimieren, um den Vergleich zu beschleunigen Spin Images werden als Vektoren angesehen in einem D dimensionalen Vektorraum, wo D die Anzahl der Pixel im Spin Image ist Beziehungen zwischen Spin Images werden mit einem niederdimensionalen Unterraum dargestellt allgemeine Methode der Bildkompression in der Objekterkennung ist principial component analysis (PCA) auch Karhunen Loeve Erweiterung genannt Berechnung von Richtungen größter Varianz einer Menge von Vektoren Berechnung der Eigenvektoren der Kovarianzmatrix der Menge von Vektoren kann eine orthogonale Matrix Eigenraum abgebildet werden, in denen die Vektoren beschrieben sind Entfernung l 2 im Spin Image Raum zwischen 2 Spin Images ist genau so groß wie die Entfernung von 2 Spin Images im Eigenraum l 2 15
16 3. Objekterkennung Spin Images Kompression Vektoren werden in einen Unterraum abgebildet, der durch die größten Eigenwerte definiert ist Annahme: die Modellbibliothek hat N Modelle x i der Größe N Mittel aller Spin Images: x = = x i 1 i Subtrahierung des Mittel von jedem einzelnen Spin Image effektivere Berechnung der Hauptrichtung durch PCA für die Beschreibung des Unterschiedes der Spin Images D N xˆ i = xi x Menge der Spin Images, die als Matrix mit jeder Spalte die m Differenz aus Mittel und Spin Image: s = [ x ˆ ˆ i x2lxn ] m m m t Kovarianz der Spin Images ist in D D Matrix gegeben durch c = s ( s ) Eigenvektoren von c sind dann berechnet durch das Lösen des m m m m Eigenvektorproblems: λ e i = c ei ist die Dimension der Spin Images nicht zu groß (~200), kann der Standart Jacobi Algorithmus genutzt werden zur Berechnung der Eigenvektoren und Eigenwerte Model Projektions Dimension wird über eine Rekonstruktionsmatrix bestimmt, die abhängig ist von der Genauigkeit der Rekonstruktion und der Varianz unter den Bilder Di 16
17 3. Objekterkennung Spin Images Kompression jedes Spin Image eines Modells ist in s dimensionalen Unterraum abgebildet, der den Eigenvektor der größten Eigenwerte umfasst, das s Tupel des Projektionskoefizienten p j m m m komprimierte Repräsentation des Spin Images: p j = ( x jei, x je2, K, x jes ) s Maß der Kompression: D Vergleich komprimierter Spin Images möglich, Spin Images in einer Zeit zu vergleichen, die unterhalb der Anzahl der Modell Spin Images bei Nutzung effizienter closed point Suchstrukturen liegt nötig, ein Szene s Tupel zu erzeugen mit den selben Parametern, mit denen die Modell s Tupel erzeugt wurden zur Ermittlung des am besten passenden Modell Spin Images zum Szenen Spin Images wird die l 2 Entfernung genutzt das gefundene naheste s Tupel wird gegen das Spin Image ersetzt, das mit dem Szenen Spin Image in Beziehung gesetzt wurde ( l 2 Entfernung ist nicht die selbe wie beim Korrelationskoeffizientenvergleich beim Spin Image Vergleich) Suchstruktur von Nene und Nayar genutzt, um den nahesten Punkt zu finden Effizienz beruht auf Annahme, dass ein Punkt nur interessant ist, wenn er weniger als einen bestimmten Abstand vom untersuchten Punkt hat 17
18 3. Objekterkennung 18
19 3. Objekterkennung Vergleich komprimierter Spin Images vor Erkennung werden alle Modelloberflächen auf die selbe Größe skaliert Spin Images für jedes Modell sind in Bibliothek gespeichert Projektionsauflösung s bestimmbar Modell s Tupel werden für jedes Modell erzeugt und in einer closed Point Suchstruktur gespeichert zur Erkennung wird nur ein Bruchteil der Punkte der Szene ausgewählt Berechnung der Spin Images mithilfe der Szenedaten Erzeugung der Szene s Tupel durch Abbildung der Szene Spin Images auf die Modell Eigenvektoren Szenen s Tupel wird genutzt, um einen Anfangspunkt in der aktuellen Modell Suchstruktur zu erhalten Rückgabe einer Liste mit Modell s Tupeln, die passen könnten Übergabe der s Tupelliste an einen Oberflächenvergleichsalgorithmus 19

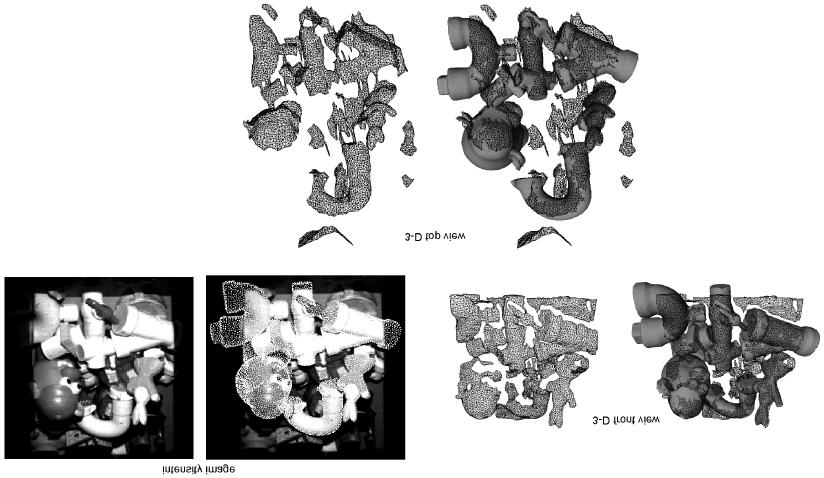
20 3. Objekterkennung Resultate der Erkennung Erstellung einer Bibliothek mit (hier) 20 Objekten Mehrere Ansichten der Modelle wurden berücksichtigt 3 Sichten der Szene werden erzeugt: 3D Front, 3D Oben und Intensitätsansicht 20
21 3. Objekterkennung 21
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Korrelationsmatrix. Statistische Bindungen zwischen den N Zufallsgrößen werden durch die Korrelationsmatrix vollständig beschrieben:
 Korrelationsmatrix Bisher wurden nur statistische Bindungen zwischen zwei (skalaren) Zufallsgrößen betrachtet. Für den allgemeineren Fall einer Zufallsgröße mit N Dimensionen bietet sich zweckmäßiger Weise
Korrelationsmatrix Bisher wurden nur statistische Bindungen zwischen zwei (skalaren) Zufallsgrößen betrachtet. Für den allgemeineren Fall einer Zufallsgröße mit N Dimensionen bietet sich zweckmäßiger Weise
Vektoren - Basiswechsel
 Vektoren - Basiswechsel Grundprinzip Für rein geometrische Anwendungen verwendet man üblicherweise die Standardbasis. Damit ergibt sich in den Zahlenangaben der Koordinaten kein Unterschied zu einem Bezug
Vektoren - Basiswechsel Grundprinzip Für rein geometrische Anwendungen verwendet man üblicherweise die Standardbasis. Damit ergibt sich in den Zahlenangaben der Koordinaten kein Unterschied zu einem Bezug
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
DEUTSCHE SCHULE MONTEVIDEO BIKULTURELLES DEUTSCH-URUGUAYISCHES ABITUR ( AUF SPANISCH )
") Grundlegende Bemerkungen : Der Begriff des Vektors wurde in den vergangenen Jahren im Geometrieunterricht eingeführt und das mathematische Modell des Vektors wurde vor allem auch im Physikunterricht schon
Grundlegende Bemerkungen : Der Begriff des Vektors wurde in den vergangenen Jahren im Geometrieunterricht eingeführt und das mathematische Modell des Vektors wurde vor allem auch im Physikunterricht schon
Kapitel 5. Eigenwerte. Ein Leontief-Modell für eine Volkswirtschaft heißt geschlossen, wenn der Konsum gleich der Produktion ist, d.h. wenn.
 Kapitel 5 Eigenwerte Josef Leydold Mathematik für VW WS 2016/17 5 Eigenwerte 1 / 42 Geschlossenes Leontief-Modell Ein Leontief-Modell für eine Volkswirtschaft heißt geschlossen, wenn der Konsum gleich
Kapitel 5 Eigenwerte Josef Leydold Mathematik für VW WS 2016/17 5 Eigenwerte 1 / 42 Geschlossenes Leontief-Modell Ein Leontief-Modell für eine Volkswirtschaft heißt geschlossen, wenn der Konsum gleich
Kollisionserkennung
 1 Kollisionserkennung von Jens Schedel, Christoph Forman und Philipp Baumgärtel 2 1. Einleitung Wozu wird Kollisionserkennung benötigt? 3 - für Computergraphik 4 - für Simulationen 5 - für Wegeplanung
1 Kollisionserkennung von Jens Schedel, Christoph Forman und Philipp Baumgärtel 2 1. Einleitung Wozu wird Kollisionserkennung benötigt? 3 - für Computergraphik 4 - für Simulationen 5 - für Wegeplanung
Vektorgeometrie. 1. Vektoren eingeben, Norm, Skalarprodukt. 2 In einem kartesischen Koordinatensystem sind die Vektoren. , v. und. gegeben.
 Vektorgeometrie 1. Vektoren eingeben, Norm, Skalarprodukt 2 In einem kartesischen Koordinatensystem sind die Vektoren u 14, 5 11 10 v 2 und w 5 gegeben. 10 10 a) Zeigen Sie, dass die Vektoren einen Würfel
Vektorgeometrie 1. Vektoren eingeben, Norm, Skalarprodukt 2 In einem kartesischen Koordinatensystem sind die Vektoren u 14, 5 11 10 v 2 und w 5 gegeben. 10 10 a) Zeigen Sie, dass die Vektoren einen Würfel
Computer Vision: 3D-Geometrie. D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17
 Computer Vision: 3D-Geometrie 1 / 17") Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
& sind die Vektorkomponenten von und sind die Vektorkoordinaten von. A x. a) Der Betrag eines Vektors
 Der Betrag eines Vektors") Einführu hnung Was ist ein Vektor? In Bereichen der Naturwissenschaften treten Größen auf, die nicht nur durch eine Zahlenangabe dargestellt werden können, wie Kraft oder Geschwindigkeit. Zur vollständigen
Einführu hnung Was ist ein Vektor? In Bereichen der Naturwissenschaften treten Größen auf, die nicht nur durch eine Zahlenangabe dargestellt werden können, wie Kraft oder Geschwindigkeit. Zur vollständigen
6.3 Hauptachsentransformation
 Im Wintersemester 6/7 wurde in der Vorlesung Höhere Mathematik für Ingenieurstudiengänge der folgende Algorithmus zur Hauptachsentransformation besprochen: 63 Hauptachsentransformation Die Matrizen, die
Im Wintersemester 6/7 wurde in der Vorlesung Höhere Mathematik für Ingenieurstudiengänge der folgende Algorithmus zur Hauptachsentransformation besprochen: 63 Hauptachsentransformation Die Matrizen, die
Lineare Algebra II 6. Übungsblatt
 Lineare Algebra II 6 Übungsblatt Fachbereich Mathematik SS 2011 Prof Dr Kollross 18/19 Mai 2011 Susanne Kürsten Tristan Alex Gruppenübung Aufgabe G1 (Minimalpolynom) Bestimmen Sie das Minimalpolynom der
Lineare Algebra II 6 Übungsblatt Fachbereich Mathematik SS 2011 Prof Dr Kollross 18/19 Mai 2011 Susanne Kürsten Tristan Alex Gruppenübung Aufgabe G1 (Minimalpolynom) Bestimmen Sie das Minimalpolynom der
Krümmungsapproximation auf 3D-Modellen
 Krümmungsapproximation auf 3D-Modellen Mathematische Grundlagen und Approximation Christian Cyrus Matrikelnummer 157707 Fakultät für Informatik Otto-von-Guericke-Universität Magdeburg Diese Ausarbeitung
Krümmungsapproximation auf 3D-Modellen Mathematische Grundlagen und Approximation Christian Cyrus Matrikelnummer 157707 Fakultät für Informatik Otto-von-Guericke-Universität Magdeburg Diese Ausarbeitung
Principal Component Analysis (PCA)
") Principal Component Analysis (PCA) Motivation: Klassifikation mit der PCA Berechnung der Hauptkomponenten Theoretische Hintergründe Anwendungsbeispiel: Klassifikation von Gesichtern Weiterführende Bemerkungen
Principal Component Analysis (PCA) Motivation: Klassifikation mit der PCA Berechnung der Hauptkomponenten Theoretische Hintergründe Anwendungsbeispiel: Klassifikation von Gesichtern Weiterführende Bemerkungen
Kurs über Lineare Gleichungssysteme. PD Dr. Karin Halupczok
 Kurs über Lineare Gleichungssysteme PD Dr. Karin Halupczok Mathematisches Institut Albert-Ludwigs-Universität Freiburg http://home.mathematik.unifreiburg.de/halupczok/diverses.html karin.halupczok@math.uni-freiburg.de
Kurs über Lineare Gleichungssysteme PD Dr. Karin Halupczok Mathematisches Institut Albert-Ludwigs-Universität Freiburg http://home.mathematik.unifreiburg.de/halupczok/diverses.html karin.halupczok@math.uni-freiburg.de
37 Gauß-Algorithmus und lineare Gleichungssysteme
 37 Gauß-Algorithmus und lineare Gleichungssysteme 37 Motivation Lineare Gleichungssysteme treten in einer Vielzahl von Anwendungen auf und müssen gelöst werden In Abschnitt 355 haben wir gesehen, dass
37 Gauß-Algorithmus und lineare Gleichungssysteme 37 Motivation Lineare Gleichungssysteme treten in einer Vielzahl von Anwendungen auf und müssen gelöst werden In Abschnitt 355 haben wir gesehen, dass
Kompakte Graphmodelle handgezeichneter Bilder. Einbeziehung in Autentizierung und Bilderkennung
 Kompakte Graphmodelle handgezeichneter Bilder Einbeziehung in Autentizierung und Bilderkennung Inhaltsverzeichnis 1 Einleitung Das graphische Model.1 Image Thinning................................. 3.
Kompakte Graphmodelle handgezeichneter Bilder Einbeziehung in Autentizierung und Bilderkennung Inhaltsverzeichnis 1 Einleitung Das graphische Model.1 Image Thinning................................. 3.
3.6 Eigenwerte und Eigenvektoren
 3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
5 Eigenwerte und die Jordansche Normalform
 Mathematik für Physiker II, SS Mittwoch 8.6 $Id: jordan.tex,v.6 /6/7 8:5:3 hk Exp hk $ 5 Eigenwerte und die Jordansche Normalform 5.4 Die Jordansche Normalform Wir hatten bereits erwähnt, dass eine n n
Mathematik für Physiker II, SS Mittwoch 8.6 $Id: jordan.tex,v.6 /6/7 8:5:3 hk Exp hk $ 5 Eigenwerte und die Jordansche Normalform 5.4 Die Jordansche Normalform Wir hatten bereits erwähnt, dass eine n n
Aufgabensammlung aus Mathematik 2 UMIT, SS 2010, Version vom 7. Mai 2010
 Aufgabensammlung aus Mathematik 2 UMIT, SS 2, Version vom 7. Mai 2 I Aufgabe I Teschl / K 3 Zerlegen Sie die Zahl 8 N in ihre Primfaktoren. Aufgabe II Teschl / K 3 Gegeben sind die natürliche Zahl 7 und
Aufgabensammlung aus Mathematik 2 UMIT, SS 2, Version vom 7. Mai 2 I Aufgabe I Teschl / K 3 Zerlegen Sie die Zahl 8 N in ihre Primfaktoren. Aufgabe II Teschl / K 3 Gegeben sind die natürliche Zahl 7 und
Übersicht der Vorlesung
 Übersicht der Vorlesung. Einführung. Bildverarbeitung. Morphologische Operationen 4. Bildsegmentierung 5. Merkmale von Objekten 6. Klassifikation 7. Dreidimensionale Bildinterpretation 8. Bewegungsanalyse
Übersicht der Vorlesung. Einführung. Bildverarbeitung. Morphologische Operationen 4. Bildsegmentierung 5. Merkmale von Objekten 6. Klassifikation 7. Dreidimensionale Bildinterpretation 8. Bewegungsanalyse
Kurze Geschichte der linearen Algebra
 Kurze Geschichte der linearen Algebra Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 20 Entwicklung Die Historische Entwicklung
Kurze Geschichte der linearen Algebra Dipl.-Inform. Wolfgang Globke Institut für Algebra und Geometrie Arbeitsgruppe Differentialgeometrie Universität Karlsruhe 1 / 20 Entwicklung Die Historische Entwicklung
(7) Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU
 Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU") (7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
(7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
Analysis of Crash Simulation Data using Spectral Embedding with Histogram Distances
 Analysis of Crash Simulation Data using Spectral Embedding with Histogram Distances Luisa Schwartz Universität Bonn Institut für Numerische Simulation Fraunhofer SCAI 25. September 2014 Luisa Schwartz
Analysis of Crash Simulation Data using Spectral Embedding with Histogram Distances Luisa Schwartz Universität Bonn Institut für Numerische Simulation Fraunhofer SCAI 25. September 2014 Luisa Schwartz
46 Eigenwerte und Eigenvektoren symmetrischer Matrizen
 46 Eigenwerte und Eigenvektoren symmetrischer Matrizen 46.1 Motivation Symmetrische Matrizen (a ij = a ji für alle i, j) kommen in der Praxis besonders häufig vor. Gibt es für sie spezielle Aussagen über
46 Eigenwerte und Eigenvektoren symmetrischer Matrizen 46.1 Motivation Symmetrische Matrizen (a ij = a ji für alle i, j) kommen in der Praxis besonders häufig vor. Gibt es für sie spezielle Aussagen über
Vektoren, Vektorräume
 Vektoren, Vektorräume Roman Wienands Sommersemester 2010 Mathematisches Institut der Universität zu Köln Roman Wienands (Universität zu Köln) Mathematik II für Studierende der Chemie Sommersemester 2010
Vektoren, Vektorräume Roman Wienands Sommersemester 2010 Mathematisches Institut der Universität zu Köln Roman Wienands (Universität zu Köln) Mathematik II für Studierende der Chemie Sommersemester 2010
3.3 Klassifikation quadratischer Formen auf R n
 3.3. Klassifikation quadratischer Formen auf R n 61 3.3 Klassifikation quadratischer Formen auf R n Wir können den Hauptsatz über symmetrische Matrizen verwenden, um uns einen Überblick über die Lösungsmengen
3.3. Klassifikation quadratischer Formen auf R n 61 3.3 Klassifikation quadratischer Formen auf R n Wir können den Hauptsatz über symmetrische Matrizen verwenden, um uns einen Überblick über die Lösungsmengen
Kompakte Graphmodelle handgezeichneter Bilder
 Kompakte Graphmodelle handgezeichneter Bilder Einbeziehung in Authentizierung und Bilderkennung Inhaltsverzeichnis Seminar Mustererkennung WS 006/07 Autor: Stefan Lohs 1 Einleitung 1 Das graphische Modell.1
Kompakte Graphmodelle handgezeichneter Bilder Einbeziehung in Authentizierung und Bilderkennung Inhaltsverzeichnis Seminar Mustererkennung WS 006/07 Autor: Stefan Lohs 1 Einleitung 1 Das graphische Modell.1
Automatisch-generierte Texturen aus Laserpunktwolken
 Automatisch-generierte Texturen aus Laserpunktwolken Sharon Friedrich, Maik Häsner Ruprecht-Karls-Universität Heidelberg Interdisziplinäres Zentrum für wissenschaftliches Rechnen (IWR) Softwarepraktikum
Automatisch-generierte Texturen aus Laserpunktwolken Sharon Friedrich, Maik Häsner Ruprecht-Karls-Universität Heidelberg Interdisziplinäres Zentrum für wissenschaftliches Rechnen (IWR) Softwarepraktikum
Lehrskript Mathematik Q12 Analytische Geometrie
 Lehrskript Mathematik Q1 Analytische Geometrie Repetitorium der analytischen Geometrie Eine Zusammenfassung der analytischen Geometrie an bayerischen Gymnasien von Markus Baur, StR Werdenfels-Gymnasium
Lehrskript Mathematik Q1 Analytische Geometrie Repetitorium der analytischen Geometrie Eine Zusammenfassung der analytischen Geometrie an bayerischen Gymnasien von Markus Baur, StR Werdenfels-Gymnasium
Definitionen. Merkblatt lineare Algebra. affiner Teilraum Menge, die durch Addition eines Vektors v 0 zu allen Vektoren eines Vektorraumes V entsteht
 Seite 1 Definitionen affiner Teilraum Menge, die durch Addition eines Vektors v 0 zu allen Vektoren eines Vektorraumes V entsteht ähnliche Matrizen Matrizen, die das gleiche charakteristische Polynom haben
Seite 1 Definitionen affiner Teilraum Menge, die durch Addition eines Vektors v 0 zu allen Vektoren eines Vektorraumes V entsteht ähnliche Matrizen Matrizen, die das gleiche charakteristische Polynom haben
Prüfung Lineare Algebra Sei V ein n-dimensionaler euklidischer Raum. Welche der folgenden Aussagen ist wahr?
 1. Sei V ein n-dimensionaler euklidischer Raum. Welche der folgenden Aussagen ist wahr? A. Wenn n = 3 ist, sind mindestens zwei der drei Euler-Winkel einer Drehung kleiner oder gleich π. B. Wenn n = 2
1. Sei V ein n-dimensionaler euklidischer Raum. Welche der folgenden Aussagen ist wahr? A. Wenn n = 3 ist, sind mindestens zwei der drei Euler-Winkel einer Drehung kleiner oder gleich π. B. Wenn n = 2
Rechnen mit Vektoren. 1. Vektoren im Koordinatensystem Freie Vektoren in der Ebene
 Rechnen mit 1. im Koordinatensystem 1.1. Freie in der Ebene 1) Definition Ein Vektor... Zwei sind gleich, wenn... 2) Das ebene Koordinatensystem Wir legen den Koordinatenursprung fest, ferner zwei zueinander
Rechnen mit 1. im Koordinatensystem 1.1. Freie in der Ebene 1) Definition Ein Vektor... Zwei sind gleich, wenn... 2) Das ebene Koordinatensystem Wir legen den Koordinatenursprung fest, ferner zwei zueinander
Gestenerkennung. Yannick Jonetzko Yannick Jonetzko
 30.04.2015 Inhalt Motivation Definition Geste Historie / Anwendungsbereiche Arten der Funktionsweise anhand eines Papers Alternativen Fazit Seite 2 Motivation Human Computer Interaction Gesten sind in
30.04.2015 Inhalt Motivation Definition Geste Historie / Anwendungsbereiche Arten der Funktionsweise anhand eines Papers Alternativen Fazit Seite 2 Motivation Human Computer Interaction Gesten sind in
Lösungsskizzen zur Klausur
 sskizzen zur Klausur Mathematik II Sommersemester 4 Aufgabe Es seien die folgenden Vektoren des R 4 gegeben: b = b = b 3 = b 4 = (a) Prüfen Sie ob die Vektoren b b 4 linear unabhängig sind bestimmen Sie
sskizzen zur Klausur Mathematik II Sommersemester 4 Aufgabe Es seien die folgenden Vektoren des R 4 gegeben: b = b = b 3 = b 4 = (a) Prüfen Sie ob die Vektoren b b 4 linear unabhängig sind bestimmen Sie
Lösungen zu den Hausaufgaben zur Analysis II
 Christian Fenske Lösungen zu den Hausaufgaben zur Analysis II Blatt 6 1. Seien 0 < b < a und (a) M = {(x, y, z) R 3 x 2 + y 4 + z 4 = 1}. (b) M = {(x, y, z) R 3 x 3 + y 3 + z 3 = 3}. (c) M = {((a+b sin
Christian Fenske Lösungen zu den Hausaufgaben zur Analysis II Blatt 6 1. Seien 0 < b < a und (a) M = {(x, y, z) R 3 x 2 + y 4 + z 4 = 1}. (b) M = {(x, y, z) R 3 x 3 + y 3 + z 3 = 3}. (c) M = {((a+b sin
Grundlagen der Computer-Tomographie
 Grundlagen der Computer-Tomographie Quellenangabe Die folgenden Folien sind zum Teil dem Übersichtsvortrag: imbie.meb.uni-bonn.de/epileptologie/staff/lehnertz/ct1.pdf entnommen. Als Quelle für die mathematischen
Grundlagen der Computer-Tomographie Quellenangabe Die folgenden Folien sind zum Teil dem Übersichtsvortrag: imbie.meb.uni-bonn.de/epileptologie/staff/lehnertz/ct1.pdf entnommen. Als Quelle für die mathematischen
Klausurenkurs zum Staatsexamen (SS 2015): Lineare Algebra und analytische Geometrie 5
: Lineare Algebra und analytische Geometrie 5") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 5): Lineare Algebra und analytische Geometrie 5 5. (Herbst 9, Thema 3, Aufgabe ) Betrachtet werde die Matrix A := 3 4 5 5 7 7 9 und die lineare Abbildung
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 5): Lineare Algebra und analytische Geometrie 5 5. (Herbst 9, Thema 3, Aufgabe ) Betrachtet werde die Matrix A := 3 4 5 5 7 7 9 und die lineare Abbildung
Was bisher geschah. 1. Zerlegung in monotone Polygone 2. Triangulierung der monotonen Teilpolygone
 Was bisher geschah Motivation, Beispiele geometrische Objekte im R 2 : Punkt, Gerade, Halbebene, Strecke, Polygon, ebene Zerlegung in Regionen (planare Graphen) maschinelle Repräsentation geometrischer
Was bisher geschah Motivation, Beispiele geometrische Objekte im R 2 : Punkt, Gerade, Halbebene, Strecke, Polygon, ebene Zerlegung in Regionen (planare Graphen) maschinelle Repräsentation geometrischer
Hauptkomponentenanalyse PCA
 Hauptkoponentenanalyse PCA Die Hauptkoponentenanalyse (Principal Coponent Analysis, PCA) ist eine Methode zur linearen Transforation der Variablen, so dass: öglichst wenige neue Variablen die relevante
Hauptkoponentenanalyse PCA Die Hauptkoponentenanalyse (Principal Coponent Analysis, PCA) ist eine Methode zur linearen Transforation der Variablen, so dass: öglichst wenige neue Variablen die relevante
Vorgehen zur Kalibrierung von Kamerabildern
 Vorgehen r Kalibrierng von Kamerabildern Prof. Dr.-Ing. Bernhard Lang, 06.04.2013 3 Kalibrierng von Kamerabildern 3.1 Hintergrnd Eine reale Kamera lässt sich geometrisch drch eine Lochkamera modellieren.
Vorgehen r Kalibrierng von Kamerabildern Prof. Dr.-Ing. Bernhard Lang, 06.04.2013 3 Kalibrierng von Kamerabildern 3.1 Hintergrnd Eine reale Kamera lässt sich geometrisch drch eine Lochkamera modellieren.
Euklidische Distanzmatrizen. Andrei Grecu
 Euklidische Distanzmatrizen Andrei Grecu Übersicht Motivation Definition und Problemstellung Algo 1: Semidefinite Programmierung Algo 2: Multidimensional Scaling Algo 3: Spring Embedder Algo 4: Genetischer
Euklidische Distanzmatrizen Andrei Grecu Übersicht Motivation Definition und Problemstellung Algo 1: Semidefinite Programmierung Algo 2: Multidimensional Scaling Algo 3: Spring Embedder Algo 4: Genetischer
Analytische Geometrie - Schnittwinkel. u 1, u 2 Richtungsvektoren der Geraden
 Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
1 Singulärwertzerlegung und Pseudoinverse
 Singulärwertzerlegung und Pseudoinverse Singulärwertzerlegung A sei eine Matrix mit n Spalten und m Zeilen. Zunächst sei n m. Bilde B = A A. Dies ist eine n n-matrix. Berechne die Eigenwerte von B. Diese
Singulärwertzerlegung und Pseudoinverse Singulärwertzerlegung A sei eine Matrix mit n Spalten und m Zeilen. Zunächst sei n m. Bilde B = A A. Dies ist eine n n-matrix. Berechne die Eigenwerte von B. Diese
Gruppenarbeit Federn, Kräfte und Vektoren
 1 Gruppenarbeit Federn, Kräfte und Vektoren Abzugeben bis Woche 10. Oktober Der geschätzte Zeitaufwand wird bei jeder Teilaufgabe mit Sternen angegeben. Je mehr Sterne eine Aufgabe besitzt, desto grösser
1 Gruppenarbeit Federn, Kräfte und Vektoren Abzugeben bis Woche 10. Oktober Der geschätzte Zeitaufwand wird bei jeder Teilaufgabe mit Sternen angegeben. Je mehr Sterne eine Aufgabe besitzt, desto grösser
Vorkurs Mathematik B
 Vorkurs Mathematik B Dr. Thorsten Camps Fakultät für Mathematik TU Dortmund 20. September 2011 Definition (R n ) Wir definieren: 1 Der R 2 sei die Menge aller Punkte in der Ebene. Jeder Punkt wird in ein
Vorkurs Mathematik B Dr. Thorsten Camps Fakultät für Mathematik TU Dortmund 20. September 2011 Definition (R n ) Wir definieren: 1 Der R 2 sei die Menge aller Punkte in der Ebene. Jeder Punkt wird in ein
6. Faktorenanalyse (FA) von Tests
 von Tests") 6. Faktorenanalyse (FA) von Tests 1 6. Faktorenanalyse (FA) von Tests 1 6.1. Grundzüge der FA nach der Haupkomponentenmethode (PCA) mit anschliessender VARIMAX-Rotation:... 2 6.2. Die Matrizen der FA...
6. Faktorenanalyse (FA) von Tests 1 6. Faktorenanalyse (FA) von Tests 1 6.1. Grundzüge der FA nach der Haupkomponentenmethode (PCA) mit anschliessender VARIMAX-Rotation:... 2 6.2. Die Matrizen der FA...
y x x y ( 2x 3y + z x + z
 Matrizen Aufgabe Sei f R R 3 definiert durch ( ) x 3y x f = x + y y x Berechnen Sie die Matrix Darstellung von f Aufgabe Eine lineare Funktion f hat die Matrix Darstellung A = 0 4 0 0 0 0 0 Berechnen Sie
Matrizen Aufgabe Sei f R R 3 definiert durch ( ) x 3y x f = x + y y x Berechnen Sie die Matrix Darstellung von f Aufgabe Eine lineare Funktion f hat die Matrix Darstellung A = 0 4 0 0 0 0 0 Berechnen Sie
Seminar 3-D Grafik Mathematische Grundlagen, Räume, Koordinatensysteme, Projektionen. Hermann Schwarz Marko Pilop
 Seminar 3-D Grafik Mathematische Grundlagen, Räume, Koordinatensysteme, Projektionen Hermann Schwarz Marko Pilop 2003-11-20 http://www.informatik.hu-berlin.de/~pilop/3d_basics.pdf {hschwarz pilop}@informatik.hu-berlin.de
Seminar 3-D Grafik Mathematische Grundlagen, Räume, Koordinatensysteme, Projektionen Hermann Schwarz Marko Pilop 2003-11-20 http://www.informatik.hu-berlin.de/~pilop/3d_basics.pdf {hschwarz pilop}@informatik.hu-berlin.de
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Lineare Algebra II, Lösungshinweise Blatt 9
 Prof Dr Katrin Wendland Priv Doz Dr Katrin Leschke Christoph Tinkl SS 27 Lineare Algebra II, Lösungshinweise Blatt 9 Aufgabe (4 Punkte) Sei 2 3 4 A = 5 6 Berechnen Sie A k für alle k N und verifizieren
Prof Dr Katrin Wendland Priv Doz Dr Katrin Leschke Christoph Tinkl SS 27 Lineare Algebra II, Lösungshinweise Blatt 9 Aufgabe (4 Punkte) Sei 2 3 4 A = 5 6 Berechnen Sie A k für alle k N und verifizieren
4 Lineare Algebra (Teil 2): Quadratische Matrizen
: Quadratische Matrizen") 4 Lineare Algebra (Teil : Quadratische Matrizen Def.: Eine (n n-matrix, die also ebensoviele Zeilen wie Spalten hat, heißt quadratisch. Hat sie außerdem den Rang n, sind also ihre n Spalten linear unabhängig,
4 Lineare Algebra (Teil : Quadratische Matrizen Def.: Eine (n n-matrix, die also ebensoviele Zeilen wie Spalten hat, heißt quadratisch. Hat sie außerdem den Rang n, sind also ihre n Spalten linear unabhängig,
Seminar. Visual Computing. Poisson Surface Reconstruction. Peter Hagemann Andreas Meyer. Peter Eisert: Visual Computing SS 11.
 Poisson Surface Reconstruction Peter Hagemann Andreas Meyer Seminar 1 Peter Eisert: SS 11 Motivation Zur 3D Darstellung von Objekten werden meist Scan-Daten erstellt Erstellung eines Dreieckmodells aus
Poisson Surface Reconstruction Peter Hagemann Andreas Meyer Seminar 1 Peter Eisert: SS 11 Motivation Zur 3D Darstellung von Objekten werden meist Scan-Daten erstellt Erstellung eines Dreieckmodells aus
Kapitel VI. Euklidische Geometrie
 Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Bildtransformationen. Geometrische Transformationen Grauwert-Interpolation
 Bildtransformationen Geometrische Transformationen Grauwert-Interpolation Transformation Transformation zwei Schritte geometrische Transformation (Trafo der Koordinaten) Neuberechnung der Pielwerte an
Bildtransformationen Geometrische Transformationen Grauwert-Interpolation Transformation Transformation zwei Schritte geometrische Transformation (Trafo der Koordinaten) Neuberechnung der Pielwerte an
Matrizen und Determinanten, Lineare Gleichungssysteme, Vektorrechnung, Analytische Geometrie
 Regina Gellrich Carsten Gellrich Matrizen und Determinanten, Lineare Gleichungssysteme, Vektorrechnung, Analytische Geometrie Mit zahlreichen Abbildungen, Aufgaben mit Lösungen und durchgerechneten Beispielen
Regina Gellrich Carsten Gellrich Matrizen und Determinanten, Lineare Gleichungssysteme, Vektorrechnung, Analytische Geometrie Mit zahlreichen Abbildungen, Aufgaben mit Lösungen und durchgerechneten Beispielen
Kapitel 0. Einführung. 0.1 Was ist Computergrafik? 0.2 Anwendungsgebiete
 Kapitel 0 Einführung 0.1 Was ist Computergrafik? Software, die einen Computer dazu bringt, eine grafische Ausgabe (oder kurz gesagt: Bilder) zu produzieren. Bilder können sein: Fotos, Schaltpläne, Veranschaulichung
Kapitel 0 Einführung 0.1 Was ist Computergrafik? Software, die einen Computer dazu bringt, eine grafische Ausgabe (oder kurz gesagt: Bilder) zu produzieren. Bilder können sein: Fotos, Schaltpläne, Veranschaulichung
2 Die Dimension eines Vektorraums
 2 Die Dimension eines Vektorraums Sei V ein K Vektorraum und v 1,..., v r V. Definition: v V heißt Linearkombination der Vektoren v 1,..., v r falls es Elemente λ 1,..., λ r K gibt, so dass v = λ 1 v 1
2 Die Dimension eines Vektorraums Sei V ein K Vektorraum und v 1,..., v r V. Definition: v V heißt Linearkombination der Vektoren v 1,..., v r falls es Elemente λ 1,..., λ r K gibt, so dass v = λ 1 v 1
2.2 Kern und Bild; Basiswechsel
 22 Kern und Bild; Basiswechsel 22 Kern und Bild; Basiswechsel 35 Jede lineare Abbildung definiert charakteristische Unterräume, sowohl im Ausgangsraum als auch im Bildraum 22 Satz Sei L: V W eine lineare
22 Kern und Bild; Basiswechsel 22 Kern und Bild; Basiswechsel 35 Jede lineare Abbildung definiert charakteristische Unterräume, sowohl im Ausgangsraum als auch im Bildraum 22 Satz Sei L: V W eine lineare
Analytische Geometrie, Vektorund Matrixrechnung
 Kapitel 1 Analytische Geometrie, Vektorund Matrixrechnung 11 Koordinatensysteme Eine Gerade, eine Ebene oder den Anschauungsraum beschreibt man durch Koordinatensysteme 111 Was sind Koordinatensysteme?
Kapitel 1 Analytische Geometrie, Vektorund Matrixrechnung 11 Koordinatensysteme Eine Gerade, eine Ebene oder den Anschauungsraum beschreibt man durch Koordinatensysteme 111 Was sind Koordinatensysteme?
klar. Um die zweite Bedingung zu zeigen, betrachte u i U i mit u i = 0. Das mittlere -Zeichen liefert s
 Nachtrag zur allgemeinen Vektorraum-Theorie. 1.5.15. Direkte Summen. Sei V ein Vektorraum, seien U 1,..., U t Unterräume, wir schreiben V = U 1 U 2 U t = t i=1 U i falls die folgenden beiden Bedingungen
Nachtrag zur allgemeinen Vektorraum-Theorie. 1.5.15. Direkte Summen. Sei V ein Vektorraum, seien U 1,..., U t Unterräume, wir schreiben V = U 1 U 2 U t = t i=1 U i falls die folgenden beiden Bedingungen
Grundsätzliches Produkte Anwendungen in der Geometrie. Vektorrechnung. Fakultät Grundlagen. Juli 2015
 Vektorrechnung Fakultät Grundlagen Juli 205 Fakultät Grundlagen Vektorrechnung Übersicht Grundsätzliches Grundsätzliches Vektorbegriff Algebraisierung der Vektorrechnung Betrag 2 Skalarprodukt Vektorprodukt
Vektorrechnung Fakultät Grundlagen Juli 205 Fakultät Grundlagen Vektorrechnung Übersicht Grundsätzliches Grundsätzliches Vektorbegriff Algebraisierung der Vektorrechnung Betrag 2 Skalarprodukt Vektorprodukt
SEMACODE: Semantische Kodierung von Bildern
 SEMACODE: Semantische Kodierung von Bildern Situation: hohes Aufkommen digitaler Bilddaten Verknüpfung multimedialer Daten (Text, Bilder, Sprache ) Problem: automatische inhaltliche Charakterisierung von
SEMACODE: Semantische Kodierung von Bildern Situation: hohes Aufkommen digitaler Bilddaten Verknüpfung multimedialer Daten (Text, Bilder, Sprache ) Problem: automatische inhaltliche Charakterisierung von
Hauptkomponentenanalyse. Principal Component Analysis (PCA)
") Hauptkomponentenanalyse Principal Component Analysis (PCA) Principal Component Analysis (PCA) Welche Ziele verfolgt man bei der Verwendung einer PCA? Repräsentation multidimensionaler Daten mit einer geringeren
Hauptkomponentenanalyse Principal Component Analysis (PCA) Principal Component Analysis (PCA) Welche Ziele verfolgt man bei der Verwendung einer PCA? Repräsentation multidimensionaler Daten mit einer geringeren
Bildverarbeitung Herbstsemester 2012. Kanten und Ecken
 Bildverarbeitung Herbstsemester 01 Kanten und Ecken 1 Inhalt Einführung Kantendetektierung Gradientenbasierende Verfahren Verfahren basierend auf der zweiten Ableitung Eckpunkterkennung Harris Corner Detector
Bildverarbeitung Herbstsemester 01 Kanten und Ecken 1 Inhalt Einführung Kantendetektierung Gradientenbasierende Verfahren Verfahren basierend auf der zweiten Ableitung Eckpunkterkennung Harris Corner Detector
3.6 Einführung in die Vektorrechnung
 3.6 Einführung in die Vektorrechnung Inhaltsverzeichnis Definition des Vektors 2 2 Skalare Multiplikation und Kehrvektor 4 3 Addition und Subtraktion von Vektoren 5 3. Addition von zwei Vektoren..................................
3.6 Einführung in die Vektorrechnung Inhaltsverzeichnis Definition des Vektors 2 2 Skalare Multiplikation und Kehrvektor 4 3 Addition und Subtraktion von Vektoren 5 3. Addition von zwei Vektoren..................................
Erweiterte Koordinaten
 Erweiterte Koordinaten Sei K n ein n dimensionaler affiner Raum Die erweiterten Koordinaten des Punktes x x n K n sind x x n Kn+ (Das ist für alle K sinnvoll, weil in jedem Körper K wohldefiniert ist In
Erweiterte Koordinaten Sei K n ein n dimensionaler affiner Raum Die erweiterten Koordinaten des Punktes x x n K n sind x x n Kn+ (Das ist für alle K sinnvoll, weil in jedem Körper K wohldefiniert ist In
Aufgaben zu JavaKara: Arrays
 Aufgaben zu JavaKara: Arrays Kleeblattregen Schreiben Sie ein Programm, das fünfzehn Kleeblätter an zufälligen Koordinaten in der Welt platziert. Es sollen fünfzehn Kleeblätter platziert werden, auch wenn
Aufgaben zu JavaKara: Arrays Kleeblattregen Schreiben Sie ein Programm, das fünfzehn Kleeblätter an zufälligen Koordinaten in der Welt platziert. Es sollen fünfzehn Kleeblätter platziert werden, auch wenn
Skalarprodukte (Teschl/Teschl Kap. 13)
") Skalarprodukte (Teschl/Teschl Kap. ) Sei V Vektorraum über R. Ein Skalarprodukt auf V ist eine Abbildung V V R, (x, y) x, y mit den Eigenschaften () x, y = y, x (symmetrisch), () ax, y = a x, y und x +
Skalarprodukte (Teschl/Teschl Kap. ) Sei V Vektorraum über R. Ein Skalarprodukt auf V ist eine Abbildung V V R, (x, y) x, y mit den Eigenschaften () x, y = y, x (symmetrisch), () ax, y = a x, y und x +
11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen
 11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen Ziel: Wir wollen lokale Extrema von Funktionen f : M R untersuchen, wobei M R n eine k-dimensionale Untermannigfaltigkeit des
11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen Ziel: Wir wollen lokale Extrema von Funktionen f : M R untersuchen, wobei M R n eine k-dimensionale Untermannigfaltigkeit des
KLAUSUR ZUR LINEAREN ALGEBRA I MUSTERLÖSUNG
 KLAUSUR ZUR LINEAREN ALGEBRA I Wiederholungsprüfung MUSTERLÖSUNG. April 2008 Name: Studiengang: Aufgabe 2 3 4 5 6 Summe Punktzahl /50 Allgemeine Hinweise: Bitte schreiben Sie Ihre Lösungen jeweils unter
KLAUSUR ZUR LINEAREN ALGEBRA I Wiederholungsprüfung MUSTERLÖSUNG. April 2008 Name: Studiengang: Aufgabe 2 3 4 5 6 Summe Punktzahl /50 Allgemeine Hinweise: Bitte schreiben Sie Ihre Lösungen jeweils unter
6 Hauptachsentransformation
 6 Hauptachsentransformation A Diagonalisierung symmetrischer Matrizen (6.1) Satz: Sei A M(n n, R) symmetrisch. Dann gibt es eine orthogonale n n-matrix U mit U t AU = D Diagonalmatrix Es folgt: Die Spalten
6 Hauptachsentransformation A Diagonalisierung symmetrischer Matrizen (6.1) Satz: Sei A M(n n, R) symmetrisch. Dann gibt es eine orthogonale n n-matrix U mit U t AU = D Diagonalmatrix Es folgt: Die Spalten
Klausur zur Vorlesung Multivariate Verfahren, SS 2006 6 Kreditpunkte, 90 min
 Klausur, Multivariate Verfahren, SS 2006, 6 Kreditpunkte, 90 min 1 Prof. Dr. Fred Böker 08.08.2006 Klausur zur Vorlesung Multivariate Verfahren, SS 2006 6 Kreditpunkte, 90 min Gesamtpunkte: 39 Aufgabe
Klausur, Multivariate Verfahren, SS 2006, 6 Kreditpunkte, 90 min 1 Prof. Dr. Fred Böker 08.08.2006 Klausur zur Vorlesung Multivariate Verfahren, SS 2006 6 Kreditpunkte, 90 min Gesamtpunkte: 39 Aufgabe
2.4 Die Länge von Vektoren
 .4 Die Länge von Vektoren 59 Wir können dies auch so sagen: Wir identifizieren (,1)-Spaltenmatrizen mit Vektoren (oder Punkten) aus R, das heißt die Menge R und R 1 werden miteinander identifiziert. Einen
.4 Die Länge von Vektoren 59 Wir können dies auch so sagen: Wir identifizieren (,1)-Spaltenmatrizen mit Vektoren (oder Punkten) aus R, das heißt die Menge R und R 1 werden miteinander identifiziert. Einen
Billboard Clouds for Extreme Model Simplification
 Fakultät für Elektrotechnik, Informatik und Mathematik Arbeitsgruppe Algorithmen und Komplexität Prof. Friedhelm Meyer auf der Heide Billboard Clouds for Extreme Model Simplification Seminararbeit im Rahmen
Fakultät für Elektrotechnik, Informatik und Mathematik Arbeitsgruppe Algorithmen und Komplexität Prof. Friedhelm Meyer auf der Heide Billboard Clouds for Extreme Model Simplification Seminararbeit im Rahmen
Proseminar Einführung in die Mathematik 1 WS 2010/11 2. Dezember 2010 Lösungen
 Proseminar Einführung in die Mathematik 1 WS 1/11. Deember 1 Lösungen 46) Wie kann man nach Wahl eines Nullpunktes die Zeichenebene in natürlicher Weise als Vektorraum betrachten? Skriptum Kapitel 4, Par.
Proseminar Einführung in die Mathematik 1 WS 1/11. Deember 1 Lösungen 46) Wie kann man nach Wahl eines Nullpunktes die Zeichenebene in natürlicher Weise als Vektorraum betrachten? Skriptum Kapitel 4, Par.
6 Eigenwerte und Eigenvektoren
 6.1 Eigenwert, Eigenraum, Eigenvektor Definition 6.1. Es sei V ein Vektorraum und f : V V eine lineare Abbildung. Ist λ K und v V mit v 0 und f(v) = λv gegeben, so heißt die Zahl λ Eigenwert (EW) von f,
6.1 Eigenwert, Eigenraum, Eigenvektor Definition 6.1. Es sei V ein Vektorraum und f : V V eine lineare Abbildung. Ist λ K und v V mit v 0 und f(v) = λv gegeben, so heißt die Zahl λ Eigenwert (EW) von f,
Mathematische Erfrischungen III - Vektoren und Matrizen
 Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
(Allgemeine) Vektorräume (Teschl/Teschl 9)
 Vektorräume (Teschl/Teschl 9)") (Allgemeine) Vektorräume (Teschl/Teschl 9) Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine (nichtleere) Menge V, auf der zwei Operationen deniert sind, die bestimmten Rechenregeln genügen:
(Allgemeine) Vektorräume (Teschl/Teschl 9) Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine (nichtleere) Menge V, auf der zwei Operationen deniert sind, die bestimmten Rechenregeln genügen:
Lernmaterialblatt Mathematik. Vektorrechnung eine Einführung. Anwendung Mathematik I. Einleitung:
 Vektorrechnung eine Einführung Einleitung: Um beispielsweise das Dreieck ABC in der Abbildung an die Position A'B'C' zu verschieben, muss jeder Punkt um sieben Einheiten nach rechts und drei nach oben
Vektorrechnung eine Einführung Einleitung: Um beispielsweise das Dreieck ABC in der Abbildung an die Position A'B'C' zu verschieben, muss jeder Punkt um sieben Einheiten nach rechts und drei nach oben
Zugriff auf Matrizen. Anhängen von Elementen. Punktweise Operatoren. Vektoren und Matrizen in MATLAB II
 Zugriff auf Matrizen. Anhängen von Elementen. Punktweise Operatoren. Vektoren und Matrizen in MATLAB II Matrixzugriff Wir wollen nun unsere Einführung in die Arbeit mit Vektoren und Matrizen in MATLAB
Zugriff auf Matrizen. Anhängen von Elementen. Punktweise Operatoren. Vektoren und Matrizen in MATLAB II Matrixzugriff Wir wollen nun unsere Einführung in die Arbeit mit Vektoren und Matrizen in MATLAB
00. Einiges zum Vektorraum R n
 00. Einiges zum Vektorraum R n In diesem einleitenden Kapitel werden die in der LV Einführung in die mathematischen Methoden erwähnten Konzepte über Vektoren (im R 2 und R 3 ) im Rahmen des n-dimensionalen
00. Einiges zum Vektorraum R n In diesem einleitenden Kapitel werden die in der LV Einführung in die mathematischen Methoden erwähnten Konzepte über Vektoren (im R 2 und R 3 ) im Rahmen des n-dimensionalen
Einleitung 19. Teil I Einführung 23. Kapitel 1 Motivation 25
 Inhaltsverzeichnis Einleitung 19 Konventionen in diesem Buch 19 Törichte Annahmen über den Leser 20 Was Sie in diesem Buch finden 20 Was Sie in diesem Buch nicht finden 20 Wie dieses Buch aufgebaut ist
Inhaltsverzeichnis Einleitung 19 Konventionen in diesem Buch 19 Törichte Annahmen über den Leser 20 Was Sie in diesem Buch finden 20 Was Sie in diesem Buch nicht finden 20 Wie dieses Buch aufgebaut ist
Einführung in die Mathematik für Informatiker
 Einführung in die Mathematik für Informatiker Prof. Dr. www.math.tu-dresden.de/ baumann 12.12.2016 9. Vorlesung Eigenschaften linearer Abbildungen Beschreibung linearer Abbildungen durch Matrizen... Eigenschaften
Einführung in die Mathematik für Informatiker Prof. Dr. www.math.tu-dresden.de/ baumann 12.12.2016 9. Vorlesung Eigenschaften linearer Abbildungen Beschreibung linearer Abbildungen durch Matrizen... Eigenschaften
Einführung in die Java- Programmierung
 Einführung in die Java- Programmierung Dr. Volker Riediger Tassilo Horn riediger horn@uni-koblenz.de WiSe 2012/13 1 Wichtig... Mittags Pommes... Praktikum A 230 C 207 (Madeleine) F 112 F 113 (Kevin) E
Einführung in die Java- Programmierung Dr. Volker Riediger Tassilo Horn riediger horn@uni-koblenz.de WiSe 2012/13 1 Wichtig... Mittags Pommes... Praktikum A 230 C 207 (Madeleine) F 112 F 113 (Kevin) E
Mathematik II für Studierende der Informatik. Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016
 im Sommersemester 2016") und Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016 25. April 2016 Die Dimensionsformel Definition 3.9 Sei f : V W eine lineare Abbildung zwischen zwei K-Vektorräumen. Der Kern
und Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016 25. April 2016 Die Dimensionsformel Definition 3.9 Sei f : V W eine lineare Abbildung zwischen zwei K-Vektorräumen. Der Kern
C orthogonal und haben die Länge 1). Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =
. Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =") 1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
Kamerakalibrierung. Messen in Videobildern, Leobots-Projekt Version 1.0. Matthias Jauernig, 03INB, HTWK Leipzig
 Kamerakalibrierung Messen in Videobildern, Leobots-Projekt 2006 Version 1.0 Matthias Jauernig, 03INB, HTWK Leipzig Copyright (c) 2006, Matthias Jauernig Kamerakalibrierung, Matthias Jauernig 3 Begriffe
Kamerakalibrierung Messen in Videobildern, Leobots-Projekt 2006 Version 1.0 Matthias Jauernig, 03INB, HTWK Leipzig Copyright (c) 2006, Matthias Jauernig Kamerakalibrierung, Matthias Jauernig 3 Begriffe
Lineare Algebra: Theorie und Anwendungen
 Lineare Algebra: Theorie und Anwendungen Sommersemester 2012 Bernhard Burgeth Universität des Saarlandes c 2010 2012, Bernhard Burgeth 1 VEKTOREN IN DER EBENE UND IM RAUM 2 1 Vektoren in der Ebene und
Lineare Algebra: Theorie und Anwendungen Sommersemester 2012 Bernhard Burgeth Universität des Saarlandes c 2010 2012, Bernhard Burgeth 1 VEKTOREN IN DER EBENE UND IM RAUM 2 1 Vektoren in der Ebene und
Grundlagen der Vektorrechnung
 Grundlagen der Vektorrechnung Ein Vektor a ist eine geordnete Liste von n Zahlen Die Anzahl n dieser Zahlen wird als Dimension des Vektors bezeichnet Schreibweise: a a a R n Normale Reelle Zahlen nennt
Grundlagen der Vektorrechnung Ein Vektor a ist eine geordnete Liste von n Zahlen Die Anzahl n dieser Zahlen wird als Dimension des Vektors bezeichnet Schreibweise: a a a R n Normale Reelle Zahlen nennt
Vorab : Von dem indischen Mathematiker D. R. Kaprekar stammt folgender Zusammenhang :
 Seite 1 Algorithmen zur Erzeugung von Kaprekar- Konstanten Autor : Dipl.- Ing. Josef Meiler ; Datum : März 015 Vorab : Von dem indischen Mathematiker D. R. Kaprekar stammt folgender Zusammenhang : a) man
Seite 1 Algorithmen zur Erzeugung von Kaprekar- Konstanten Autor : Dipl.- Ing. Josef Meiler ; Datum : März 015 Vorab : Von dem indischen Mathematiker D. R. Kaprekar stammt folgender Zusammenhang : a) man
Computational Intelligence 1 / 20. Computational Intelligence Künstliche Neuronale Netze Perzeptron 3 / 20
 Gliederung / Künstliche Neuronale Netze Perzeptron Einschränkungen Netze von Perzeptonen Perzeptron-Lernen Perzeptron Künstliche Neuronale Netze Perzeptron 3 / Der Psychologe und Informatiker Frank Rosenblatt
Gliederung / Künstliche Neuronale Netze Perzeptron Einschränkungen Netze von Perzeptonen Perzeptron-Lernen Perzeptron Künstliche Neuronale Netze Perzeptron 3 / Der Psychologe und Informatiker Frank Rosenblatt
Musterlösungen zur Linearen Algebra II Übungsklausur
 Musterlösungen zur Linearen Algebra II Übungsklausur Aufgabe. Sei A R 3 3. Welche der folgenden Aussagen sind richtig? a Ist det(a =, dann ist A eine orthogonale Matrix. b Ist A eine orthogonale Matrix,
Musterlösungen zur Linearen Algebra II Übungsklausur Aufgabe. Sei A R 3 3. Welche der folgenden Aussagen sind richtig? a Ist det(a =, dann ist A eine orthogonale Matrix. b Ist A eine orthogonale Matrix,
(x 1. Vektoren. g: x = p + r u. p r (u1. x 2. u 2. p 2
 Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
geschlossene Schachtel mit einem kleinen Loch
 Kameramodellierung Lochkamera Kamerakonstante Kamerazentrum geschlossene Schachtel mit einem kleinen Loch ideale Kamera: Loch hat keine Ausdehnung die Strahlen sind ein Büschel von Geraden Abbildung erfolgt
Kameramodellierung Lochkamera Kamerakonstante Kamerazentrum geschlossene Schachtel mit einem kleinen Loch ideale Kamera: Loch hat keine Ausdehnung die Strahlen sind ein Büschel von Geraden Abbildung erfolgt
Kapitel 1 Beschreibende Statistik
 Beispiel 1.25: fiktive Aktienkurse Zeitpunkt i 0 1 2 Aktienkurs x i 100 160 100 Frage: Wie hoch ist die durchschnittliche Wachstumsrate? Dr. Karsten Webel 53 Beispiel 1.25: fiktive Aktienkurse (Fortsetzung)
Beispiel 1.25: fiktive Aktienkurse Zeitpunkt i 0 1 2 Aktienkurs x i 100 160 100 Frage: Wie hoch ist die durchschnittliche Wachstumsrate? Dr. Karsten Webel 53 Beispiel 1.25: fiktive Aktienkurse (Fortsetzung)
Bildsegmentierung mit Level Sets
 Bildsegmentierung mit Level Sets Seminar Bildsegmentierung und Computer Vision im Wintersemester 2005 Übersicht 1 Übersicht 2 Definitionen Ausbreitungsgeschwindigkeit Übersicht 3 Inter-Frame-basierte Modellierung
Bildsegmentierung mit Level Sets Seminar Bildsegmentierung und Computer Vision im Wintersemester 2005 Übersicht 1 Übersicht 2 Definitionen Ausbreitungsgeschwindigkeit Übersicht 3 Inter-Frame-basierte Modellierung
Geometrische Objekte im 3-dimensionalen affinen Raum oder,... wie nützlich ist ein zugehöriger Vektorraum der Verschiebungen
 Geometrische Objekte im -dimensionalen affinen Raum Bekanntlich versteht man unter geometrischen Objekten Punktmengen, auf die man die üblichen Mengenoperationen wie z.b.: Schnittmenge bilden: - aussagenlogisch:
Geometrische Objekte im -dimensionalen affinen Raum Bekanntlich versteht man unter geometrischen Objekten Punktmengen, auf die man die üblichen Mengenoperationen wie z.b.: Schnittmenge bilden: - aussagenlogisch:
3 Vektoren. 3.1 Kartesische Koordinaten in Ebene und Raum. Höhere Mathematik 60
 Kartesische Koordinaten in Ebene und Raum 3 Vektoren 3.1 Kartesische Koordinaten in Ebene und Raum In der Ebene (mathematisch ist dies die Menge R 2 ) ist ein kartesisches Koordinatensystem festgelegt
Kartesische Koordinaten in Ebene und Raum 3 Vektoren 3.1 Kartesische Koordinaten in Ebene und Raum In der Ebene (mathematisch ist dies die Menge R 2 ) ist ein kartesisches Koordinatensystem festgelegt