DSP-NF-Filter in QRP-Manier QRP an der See, 15. September 2012
|
|
|
- Karl Elmar Klein
- vor 5 Jahren
- Abrufe
Transkript
1 DSP-NF-Filter in QRP-Manier QRP an der See, 15. September 2012 Gerrit Buhe,
2 Inhalt 2 Aufbau DSP-System Digitalisierung und Abtasttheorem Beschreibung LTI-System Impulsantwort zu Übertragungsfunktion Werkzeuge der digitalen Signalverarbeitung Matlab, Octave und Scilab FIR-Filter Eigenschaften Entwurf Fensterung TP BP-Transformation IIR-Filter Eigenschaften Topologien (Direktform I, II) Schweizer Taschenmesser der digitalen Signalverarbeitung Hardware-Plattformen für den Amateur Günstige DSP-Lösungen Mikrocontroller als DSP-Ersatz
3 Aufbau DSP-System DSP 3
4 Digitalisierung 4 Digitalisierung eines Signales bedeutet Quantisierung in der Zeit: Messung der Amplitude eines analogen Signals in regelmäßigen Abständen Quantisierung der Amplitude: Umwandlung der kontinuierlichen Spannungswerte in eine diskrete Folge von numerischen Werten
5 Digitalisierung Digitalisierung eines Signales bedeutet Quantisierung in der Zeit: Messung der Amplitude eines analogen Signals in regelmäßigen Abständen Quantisierung der Amplitude: Umwandlung der kontinuierlichen Spannungswerte in eine diskrete Folge von numerischen Werten 5 Abtasten in diskreten Zeitabständen
6 Digitalisierung Digitalisierung eines Signales bedeutet Quantisierung in der Zeit: Messung der Amplitude eines analogen Signals in regelmäßigen Abständen Quantisierung der Amplitude: Umwandlung der kontinuierlichen Spannungswerte in eine diskrete Folge von numerischen Werten Abtasten in diskreten Zeitabständen Quantisieren=Runden auf verfügbare Stufen Zahlenfolge: 0,1,1,2,3,3,4,4,4,4,4,4,3,3,2,1,1, 0,-1,-2,-2,-3,-3,-4,-4,-4,-4,-4,-3, -3,-2,-2, 6
7 Digitalisierung Digitalisierung eines Signales bedeutet Quantisierung in der Zeit: Messung der Amplitude eines analogen Signals in regelmäßigen Abständen Quantisierung der Amplitude: Umwandlung der kontinuierlichen Spannungswerte in eine diskrete Folge von numerischen Werten Abtasten in diskreten Zeitabständen Quantisieren=Runden auf verfügbare Stufen Zahlenfolge: 0,1,1,2,3,3,4,4,4,4,4,4,3,3,2,1,1, 0,-1,-2,-2,-3,-3,-4,-4,-4,-4,-4,-3, -3,-2,-2, Quantisierungsfehler: 0,-0.25,0.47,0.14,-0.26,0.23, -0.38,-0.12,
8 Digitalisierung (Spektrum) 8 Das Spektrum wiederholt sich um Vielfache der Abtastfrequenz Beispiel im Bild fs=10khz, fc=1khz Auch numerische Übertragungsfunktionen (z.b. digitale Filter) wiederholen sich um Abtastfrequenzvielfache
9 Digitalisierung (Spektrum) Das Spektrum wiederholt sich um Vielfache der Abtastfrequenz Beispiel im Bild fs=10khz, fc=1khz Auch numerische Übertragungsfunktionen (z.b. digitale Filter) wiederholen sich um Abtastfrequenzvielfache 9 Versuch der digitalen Filterung (rot) Funktioniert nicht, da sich auch dessen Übertragungsfunktion wiederholt

10 Digitalisierung (Spektrum) 10 Das Spektrum wiederholt sich um Vielfache der Abtastfrequenz Beispiel im Bild fs=10khz, fc=1khz Auch numerische Übertragungsfunktionen (z.b. digitale Filter) wiederholen sich um Abtastfrequenzvielfache Versuch der digitalen Filterung (rot) Funktioniert nicht, da sich auch dessen Übertragungsfunktion wiederholt Auch höherfrequente Signale können zu den Abtastwerten passen hier z.b. auch -9kHz und 11kHz
11 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 11 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 1 khz
12 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 12 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 2 khz
13 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 13 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 3 khz
14 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 14 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 4 khz
15 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 15 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 5 khz
16 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 16 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 6 khz wir sehen 4 khz!
17 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 17 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 7 khz wir sehen 3 khz!
18 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 18 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 8 khz wir sehen 2 khz!
19 Abtasttheorem (Shannon/Nyquist) Das Abtasttheorem besagt, daß die Abtastfrequenz mindestens doppelt so hoch wie die höchste Nutzsignalfrequenz (bzw. Bandbreite BW) sein muß f s 2 BW 19 In diesem Fall wird das abgetastete Signal vollständig und eineindeutig durch die Abtastwerte beschrieben Bei Nichteinhaltung erscheinen neue Signalanteile, die in der Regel stören Aliasing fs = 10 khz fc = 9 khz wir sehen 1 khz!
20 Aufbau DSP-System DSP 20
21 Lineare zeitinvariante Systeme System: erzeugt aus Eingangsgrößen Ausgangsgrößen x(t) 21 LTI-System y(t) Zeitinvarianz: Das Verhalten ändert sich nicht über Zeit. wenn x1(t) y1(t) folgt x1(t- t) y1(t- t) Linearität: Es gilt das Überlagerungsprinzip (Superpositionsprinzip). wenn x1(t) y1(t) und x2(t) y2(t) folgt ax1(t) + bx2(t) ay1(t) + by2(t)
22 Beschreibung LTI-Systeme LTI-Systeme können im Zeitbereich durch ihre Impulsantwort beschrieben werden Die Impulsantwort ist die Reaktion des Systems auf einen Dirac-Impuls (t) x(t) = δ (t) y(t) = a(t) 1 t 0 t 0 Jedes beliebige Eingangssignal läßt sich als Summe zeitlich verschobener und gewichteter Dirac-Impulse darstellen Ausgangssignal y(t) ist Faltungs summe mit Impulsantwort a(t): x(t ) = x(t) x(iτ ) δ (t iτ ) i= y (t ) = x(iτ ) a (t iτ ) i= τ t 0 22 x(0)δ (t) x(2τ )δ (t-2τ ) x(τ )δ (t-τ ) x(3τ )δ (t-3τ ) Man schreibt abgekürzt auch: y (t ) = x(t ) a (t )
23 Beschreibung LTI-Systeme Die Impulsantwort beschreibt das LTI-System vollständig Was heißt das? 23
24 Beschreibung LTI-Systeme Die Impulsantwort eines LTI-Systems ist über die Fourier-Transformation mit der Übertragungsfunktion des Systems verbunden! FourierTransf. Im Zeitbereich wird das Ausgangssignal eines Systems durch die Faltung vom Eingangssignal mit der Impulsantwort ermittelt Im Frequenzbereich wird das Ausgangssignal durch Multiplikation mit der Übertragungsfunktion des Systems ermittelt 24


25 Werkzeuge dig. Signalverarbeitung DSP-Algorithmen werden i.d.r mit Hilfe numerischer Simulations-SW entwickelt Kommerzieller Marktführer ist MathWorks mit Matlab Es gibt sehr gute alternative Simulationsprogramme die frei verfügbar sind GNU Octave Matlab-ähnliche Syntax Scilab Komfortabler insb. für Windows-Nutzer 25


26 Werkzeuge Octave.org 26 Vor allem für Linux und POSIX-Systeme entwickelt, aber auch unter Windows und Mac OS lauffähig

27 Werkzeuge Scilab.org 27 Nicht GNU GPL, aber andere freie Lizenz Sehr gut unter Windows nutzbar
28 FIR-Filter FIR Finite Impulse Response (endliche Impulsantwort) Immer stabil! Durch garantierte Stabilität meist Basis adaptiver Filter (Veränderung der Koeffizienten zur Laufzeit) Direkte Implementierung der Faltungssumme (Zeitbereich) Koeffizienten h(0)...h(p-1) entsprechen den Stützstellen der Impulsantwort Symmetrische FIR-Filter sind phasenlinear und haben eine Gruppenlaufzeit, die der halben Filterlänge entspricht Verstärkung im Durchlaßbereich ist Summe aller Koeffizienten Eingang für ADC-Werte Ausgang zum DAC P 1 28 y (k )= h (i) x (k i) i=0
29 FIR-Filter - Entwurf Einfachste Methode: Frequenzgang (Übertragungsfunktion) vorgeben und Fourier-Transformieren Impulsantwort Wenn es sich um ein TP, BP, HP handelt, kann gleich die SINC-Funktion verwendet werden (Fourier-Transformierte eines Rechtecks ) Impulsantwort auf Filterlänge (= Anzahl Koeffizienten) begrenzen und Fensterfunktion anwenden zur Unterdrückung des Leck-Effektes Impulsantwort mit Fensterfunktionen 29 Übertragungsfunktion mit versch. Fensterfunktionen
30 FIR-Filter - Entwurf Einfachste Methode: Frequenzgang (Übertragungsfunktion) vorgeben und Fourier-Transformieren Impulsantwort Wenn es sich um ein TP, BP, HP handelt, kann gleich die SINC-Funktion verwendet werden (Fourier-Transformierte eines Rechtecks ) Impulsantwort auf Filterlänge (= Anzahl Koeffizienten) begrenzen und Fensterfunktion anwenden zur Unterdrückung des Leck-Effektes Impulsantwort mit Fensterfunktionen 30 Übertragungsfunktion mit versch. Fensterfunktionen
31 FIR-Filter - TP-BP-Transformation 31 TP BP-Transformation durch Multiplikation der Impulsantwort mit Kosinus entsprechender Frequenz (Mittenfrequenz des BP, 3kHz im Bild)
32 FIR-Filter - TP-BP-Transformation 32 TP BP-Transformation durch Multiplikation der Impulsantwort mit Kosinus entsprechender Frequenz (Mittenfrequenz des BP, 3kHz im Bild)
33 FIR-Filter - TP-BP-Transformation TP BP-Transformation durch Multiplikation der Impulsantwort mit Kosinus entsprechender Frequenz (Mittenfrequenz des BP, 3kHz im Bild) Bei Verwendung des Sinus' wird eine Phasenverschiebung +/- 90 erzielt TP HP-Transformation durch Vorzeichenwechsel jedes zweiten Koeffizienten 33
 Bei Verwendung des Sinus' wird eine Phasenverschiebung +/- 90 erzielt TP HP-Transformation durch Vorzeichenwechsel jedes zweiten Koeffizienten")
34 FIR-Filter - TP-BP-Transformation TP BP-Transformation durch Multiplikation der Impulsantwort mit Kosinus entsprechender Frequenz (Mittenfrequenz des BP, 3kHz im Bild) Bei Verwendung des Sinus' wird eine Phasenverschiebung +/- 90 erzielt TP HP-Transformation durch Vorzeichenwechsel jedes zweiten Koeffizienten 34
35 IIR-Filter IIR Infinite Impulse Response (unendliche Impulsantwort (möglich)) Direktform I 35
36 IIR-Filter IIR Infinite Impulse Response (unendliche Impulsantwort (möglich)) Besitzen Rückkopplungen können instabil sein Direktform I 36
) Besitzen Rückkopplungen können")


 Werden meist als")
37 IIR-Filter IIR Infinite Impulse Response (unendliche Impulsantwort (möglich)) Besitzen Rückkopplungen können instabil sein Sehr recheneffiziente Filter mit wenigen Multiplikationen realisierbar Filterentwurf schwieriger als bei FIR-Filtern, i.d.r. mit spezieller Design-Software Sehr empfindlich auf Quantisierungseffekte (Rundungen) Werden meist als kaskadierte Filter 2-ter Ordnung (biquads) eingesetzt Direktform I 37 Direktform II, auch kanonische
38 IIR - Schweizer Taschenmesser Mit der IIR-Topologie kann nur anhand unterschiedlicher Koeffizienten enorm viel realisiert werden: TP-,BP-,HP-Filter, Differenzierer, Integrierer, Oszillatoren, Kamm-Filter, Beispiel digitaler Oszillator (Grenzfall der Stabilität) Digitaler IIR-Oszillator 38



39 Aktuelle günstige DSP-Lösungen Mittlerweile gibt es wieder kostengünstige DSP-Evaluierungsmodule, insbesondere von Texas Instruments ( Lieferung erfolgt auch an private Besteller 35$ 99$ 49$ 39
 rechnen")
40 Mikrocontroller als DSP-Ersatz Leistungsfähigkeit moderner Mikrocontroller steigt immer weiter Es gibt sogar Modelle mit DSP-Co-Prozessor auf dem selben Chip ARM Cortex M4 40 Auch kleine 16Bit-MCUs können zumindest IIR-Filter bei geringer Abtastrate (8kHz) rechnen MSP430-Familie
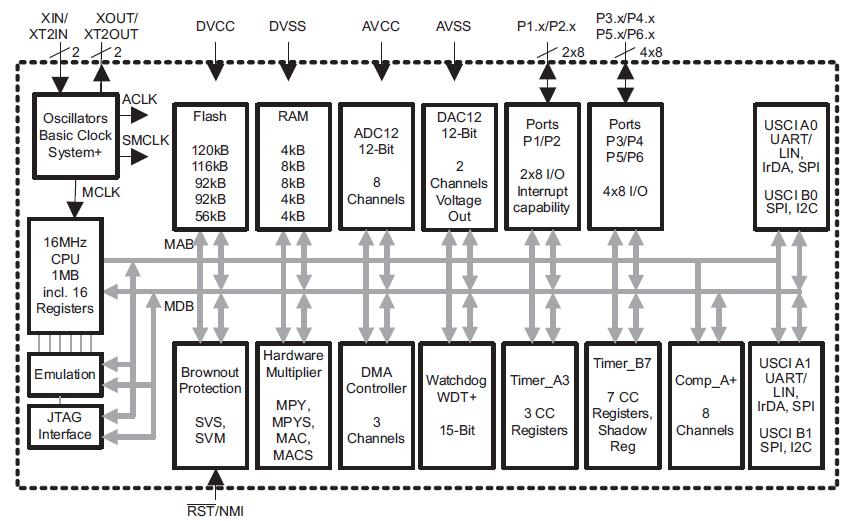
41 DSP mit MSP430F
42 QRP-FIR-Filter Signal im FIR-Filter weiter schieben Mit Koeffizienten multiplizieren und Addieren 42

43 Digitale QRP-NF-Filter Mit einem 10mm x 10mm Mikrocontroller für <5 lassen sich stromsparende DSP-NF-Filter nach QRP-Manier aufbauen Die internen 12 Bit-AD- und DA-Wandler genügen von der Dynamik, wenn sowieso eine AGC im Einsatz ist (einfache analoge Filter sollten ergänzt werden) DSP 43
44 Ende
Digitale Signalverarbeitung für Einsteiger
 Digitale Signalverarbeitung für Einsteiger Dipl.-Ing. Erich H. Franke, DK6II erich.franke@afusoft.com 54. Weinheimer UKW-Tagung 2009 Errata: Nobody is perfect Im Skriptum haben sich kleine aber ärgerliche
Digitale Signalverarbeitung für Einsteiger Dipl.-Ing. Erich H. Franke, DK6II erich.franke@afusoft.com 54. Weinheimer UKW-Tagung 2009 Errata: Nobody is perfect Im Skriptum haben sich kleine aber ärgerliche
Tontechnik 2. Digitale Filter. Digitale Filter. Zuordnung diskrete digitale Signale neue diskrete digitale Signale
 Tontechnik 2 Digitale Filter Audiovisuelle Medien HdM Stuttgart Digitale Filter Zuordnung diskrete digitale Signale neue diskrete digitale Signale lineares, zeitinvariantes, diskretes System (LTD-System)
Tontechnik 2 Digitale Filter Audiovisuelle Medien HdM Stuttgart Digitale Filter Zuordnung diskrete digitale Signale neue diskrete digitale Signale lineares, zeitinvariantes, diskretes System (LTD-System)
Digitale Signalverarbeitung
 Daniel Ch. von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme 4. Auflage Mit 222 Bildern, 91 Beispielen, 80 Aufgaben sowie einer CD-ROM mit Lösungen
Daniel Ch. von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme 4. Auflage Mit 222 Bildern, 91 Beispielen, 80 Aufgaben sowie einer CD-ROM mit Lösungen
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik
![Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik](/thumbs/69/59889032.jpg "Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik") Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Vorteile digitaler Filter
 Digitale Filter Vorteile digitaler Filter DF haben Eigenschaften, die mit analogen Filtern nicht realisiert werden können (z.b. lineare Phase). DF sind unabhängig von der Betriebsumgebung (z.b. Temperatur)
Digitale Filter Vorteile digitaler Filter DF haben Eigenschaften, die mit analogen Filtern nicht realisiert werden können (z.b. lineare Phase). DF sind unabhängig von der Betriebsumgebung (z.b. Temperatur)
Inhaltsverzeichnis. Daniel von Grünigen. Digitale Signalverarbeitung. mit einer Einführung in die kontinuierlichen Signale und Systeme
 Inhaltsverzeichnis Daniel von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme ISBN (Buch): 978-3-446-44079-1 ISBN (E-Book): 978-3-446-43991-7 Weitere
Inhaltsverzeichnis Daniel von Grünigen Digitale Signalverarbeitung mit einer Einführung in die kontinuierlichen Signale und Systeme ISBN (Buch): 978-3-446-44079-1 ISBN (E-Book): 978-3-446-43991-7 Weitere
Signalprozessoren. Digital Signal Processors VO [2h] , LU 2 [2h]
![Signalprozessoren. Digital Signal Processors VO [2h] , LU 2 [2h]](/thumbs/92/108836937.jpg "Signalprozessoren. Digital Signal Processors VO [2h] , LU 2 [2h]") Signalprozessoren Digital Signal Processors VO [2h] 182.082, LU 2 [2h] 182.084 http://ti.tuwien.ac.at/rts/teaching/courses/sigproz Herbert Grünbacher Institut für Technische Informatik (E182) Herbert.Gruenbacher@tuwien.ac.at
Signalprozessoren Digital Signal Processors VO [2h] 182.082, LU 2 [2h] 182.084 http://ti.tuwien.ac.at/rts/teaching/courses/sigproz Herbert Grünbacher Institut für Technische Informatik (E182) Herbert.Gruenbacher@tuwien.ac.at
Tontechnik 2. Digitale Filter. Digitale Filter. Zuordnung Eingang x(t) Ausgang y(t) diskrete digitale Signale neue diskrete digitale Signale
 Ausgang y(t) diskrete digitale Signale neue diskrete digitale Signale") Tontechnik 2 Digitale Filter Audiovisuelle Medien HdM Stuttgart Digitale Filter Zuordnung Eingang x(t) Ausgang y(t) diskrete digitale Signale neue diskrete digitale Signale lineares, zeitinvariantes, diskretes
Tontechnik 2 Digitale Filter Audiovisuelle Medien HdM Stuttgart Digitale Filter Zuordnung Eingang x(t) Ausgang y(t) diskrete digitale Signale neue diskrete digitale Signale lineares, zeitinvariantes, diskretes
Digitale Signalverarbeitung mit MATLAB
 Martin Werner Digitale Signalverarbeitung mit MATLAB Grundkurs mit 16 ausführlichen Versuchen 4., durchgesehene und ergänzte Auflage Mit 180 Abbildungen und 76 Tabellen STUDIUM VIEWEG+ TEUBNER 1 Erste
Martin Werner Digitale Signalverarbeitung mit MATLAB Grundkurs mit 16 ausführlichen Versuchen 4., durchgesehene und ergänzte Auflage Mit 180 Abbildungen und 76 Tabellen STUDIUM VIEWEG+ TEUBNER 1 Erste
- Sei r(x,y) Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.
 Eingangsbild, dass nur Rauschen (Quantenrauschen) enthält.") Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Eingang System Ausgang - Sei r(x,y) Eingangsbild, dass nur (Quantenrauschen) enthält. - Das Bild enthalte keinerlei Information, d.h. das Spektrum ist weiß und es gibt keine Korrelationen zwischen den
Theorie digitaler Systeme
 Theorie digitaler Systeme Vorlesung 15: Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Einführung Entwurfsmethoden für IIR-Filtern sind für Zeitbereich und Bildbereich bekannt Finite-Impulse-Response
Theorie digitaler Systeme Vorlesung 15: Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Einführung Entwurfsmethoden für IIR-Filtern sind für Zeitbereich und Bildbereich bekannt Finite-Impulse-Response
Digitale Signalverarbeitung. mit MATLAB
 Martin Werner Digitale Signalverarbeitung mit MATLAB Grundkurs mit 16 ausführlichen Versuchen 3., vollständig überarbeitete und aktualisierte Auflage Mit 159 Abbildungen und 67 Tabellen Studium Technik
Martin Werner Digitale Signalverarbeitung mit MATLAB Grundkurs mit 16 ausführlichen Versuchen 3., vollständig überarbeitete und aktualisierte Auflage Mit 159 Abbildungen und 67 Tabellen Studium Technik
5. Beispiele - Filter Seite 15
 5. Beispiele - Filter Seite 15 5.2 Entwurf digitaler Filter Zur Demonstration eines rekursiv implementierten Tiefpasses (FIR Finite Impulse Response bzw. IIR Infinite Impulse Response) soll dieses Beispiel
5. Beispiele - Filter Seite 15 5.2 Entwurf digitaler Filter Zur Demonstration eines rekursiv implementierten Tiefpasses (FIR Finite Impulse Response bzw. IIR Infinite Impulse Response) soll dieses Beispiel
Datenaquisition. Verstärker Filter. Sensor ADC. Objekt. Rechner
 Datenaquisition Sensor Verstärker Filter ADC Objekt Rechner Datenaquisition Verstärker: - linearer Arbeitsbereich - linearer Frequenzgang - Vorkehrungen gegen Übersteuerung (trends, shot noise) - Verstärkerrauschen
Datenaquisition Sensor Verstärker Filter ADC Objekt Rechner Datenaquisition Verstärker: - linearer Arbeitsbereich - linearer Frequenzgang - Vorkehrungen gegen Übersteuerung (trends, shot noise) - Verstärkerrauschen
Spektrumanalyse. Inhalt. I. Einleitung 2. II. Hauptteil 2-8
 Fachhochschule Aachen Campus Aachen Hochfrequenztechnik Hauptstudium Wintersemester 2007/2008 Dozent: Prof. Dr. Heuermann Spektrumanalyse Erstellt von: Name: Mario Schnetger Inhalt I. Einleitung 2 II.
Fachhochschule Aachen Campus Aachen Hochfrequenztechnik Hauptstudium Wintersemester 2007/2008 Dozent: Prof. Dr. Heuermann Spektrumanalyse Erstellt von: Name: Mario Schnetger Inhalt I. Einleitung 2 II.
Grundlagen der Signalverarbeitung
 Grundlagen der Signalverarbeitung Zeitdiskrete Signale Wintersemester 6/7 Kontinuierliche und diskrete Signale wertkontinuierlich wertdiskret Signal Signal Signal Signal zeitdiskret zeitkontinuierlich
Grundlagen der Signalverarbeitung Zeitdiskrete Signale Wintersemester 6/7 Kontinuierliche und diskrete Signale wertkontinuierlich wertdiskret Signal Signal Signal Signal zeitdiskret zeitkontinuierlich
Martin Meyer. Signalverarbeitung. Analoge und digitale Signale, Systeme und Filter 5. Auflage STUDIUM VIEWEG+ TEUBNER
 Martin Meyer Signalverarbeitung Analoge und digitale Signale, Systeme und Filter 5. Auflage STUDIUM VIEWEG+ TEUBNER VII 1 Einführung 1 1.1 Das Konzept der Systemtheorie 1 1.2 Übersicht über die Methoden
Martin Meyer Signalverarbeitung Analoge und digitale Signale, Systeme und Filter 5. Auflage STUDIUM VIEWEG+ TEUBNER VII 1 Einführung 1 1.1 Das Konzept der Systemtheorie 1 1.2 Übersicht über die Methoden
Theorie digitaler Systeme
 Theorie digitaler Systeme Vorlesung 6: Impulsantwort und Faltung Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Grundlegende Systemeigenschaften Beispiele führten zu linearen Differenzengleichungen
Theorie digitaler Systeme Vorlesung 6: Impulsantwort und Faltung Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Grundlegende Systemeigenschaften Beispiele führten zu linearen Differenzengleichungen
Erweiterung einer digitalen Übertragungsstrecke mit Einplatinencomputern zur Signalanalyse
 Erweiterung einer digitalen mit Einplatinencomputern Alexander Frömming Mario Becker p.1 Inhalt 1 Ausgangssituation 2 Zielsetzung 3 Theoretische Grundlagen 4 Umsetzung - Hardware 5 Umsetzung - Software
Erweiterung einer digitalen mit Einplatinencomputern Alexander Frömming Mario Becker p.1 Inhalt 1 Ausgangssituation 2 Zielsetzung 3 Theoretische Grundlagen 4 Umsetzung - Hardware 5 Umsetzung - Software
Übungen zu Transformationen. im Bachelor ET oder EW. Version 2.0 für das Wintersemester 2014/2015 Stand:
 Fachhochschule Dortmund University of Applied Sciences and Arts Institut für Informationstechnik Software-Engineering Signalverarbeitung Regelungstechnik IfIT Übungen zu Transformationen im Bachelor ET
Fachhochschule Dortmund University of Applied Sciences and Arts Institut für Informationstechnik Software-Engineering Signalverarbeitung Regelungstechnik IfIT Übungen zu Transformationen im Bachelor ET
Seminar Digitale Signalverarbeitung Thema: Digitale Filter
 Seminar Digitale Signalverarbeitung Thema: Digitale Filter Autor: Daniel Arnold Universität Koblenz-Landau, August 2005 Inhaltsverzeichnis i 1 Einführung 1.1 Allgemeine Informationen Digitale Filter sind
Seminar Digitale Signalverarbeitung Thema: Digitale Filter Autor: Daniel Arnold Universität Koblenz-Landau, August 2005 Inhaltsverzeichnis i 1 Einführung 1.1 Allgemeine Informationen Digitale Filter sind
Klausur zur Vorlesung Digitale Signalverarbeitung
 INSTITUT FÜR INFORMATIONSVERARBEITUNG UNIVERSITÄT HANNOVER Appelstraße 9A 3067 Hannover Klausur zur Vorlesung Digitale Signalverarbeitung Datum:.08.006 Uhrzeit: 09:00 Uhr Zeitdauer: Stunden Hilfsmittel:
INSTITUT FÜR INFORMATIONSVERARBEITUNG UNIVERSITÄT HANNOVER Appelstraße 9A 3067 Hannover Klausur zur Vorlesung Digitale Signalverarbeitung Datum:.08.006 Uhrzeit: 09:00 Uhr Zeitdauer: Stunden Hilfsmittel:
Digitale Signalverarbeitung Vorlesung 5 - Filterstrukturen
 Digitale Signalverarbeitung Vorlesung 5 - Filterstrukturen 21. November 2016 Siehe Skript, Kapitel 8 Kammeyer & Kroschel, Abschnitt 4.1 1 Einführung Filterstrukturen: FIR vs. IIR 2 Motivation: Grundlage
Digitale Signalverarbeitung Vorlesung 5 - Filterstrukturen 21. November 2016 Siehe Skript, Kapitel 8 Kammeyer & Kroschel, Abschnitt 4.1 1 Einführung Filterstrukturen: FIR vs. IIR 2 Motivation: Grundlage
Fahrzeugmechatronik Masterstudiengang M 3.2 Sensoren und Aktoren Labor für Automatisierung und Dynamik AuD FB 03MB
 Abb. 6 Dreidimensionale Darstellung des Frequenzgangs G ATP () s, Achsteilungen s 2 π in Hz Prof. Dr. Höcht 1/29 18.06.2006 11:13 Z_ Abb. 7 Einfluß des Pols bei s imaginären Achse, Achsteilungen in Hz
Abb. 6 Dreidimensionale Darstellung des Frequenzgangs G ATP () s, Achsteilungen s 2 π in Hz Prof. Dr. Höcht 1/29 18.06.2006 11:13 Z_ Abb. 7 Einfluß des Pols bei s imaginären Achse, Achsteilungen in Hz
x[n-1] x[n] x[n+1] y[n-1] y[n+1]
![x[n-1] x[n] x[n+1] y[n-1] y[n+1]](/thumbs/72/67333121.jpg "x[n-1] x[n] x[n+1] y[n-1] y[n+1]") Systeme System Funtion f, die ein Eingangssignal x in ein Ausgangssignal y überführt. zeitdisretes System Ein- und Ausgangssignal sind nur für disrete Zeitpunte definiert y[n] = f (.., x[n-1], x[n], x[n+1],
Systeme System Funtion f, die ein Eingangssignal x in ein Ausgangssignal y überführt. zeitdisretes System Ein- und Ausgangssignal sind nur für disrete Zeitpunte definiert y[n] = f (.., x[n-1], x[n], x[n+1],
Praxiswerkstatt Algorithmen der Signalcodierung
 Praxiswerkstatt Algorithmen der Signalcodierung 2. Termin Themen heute: Abtastung Lineare Zeitinvariante Systeme Seite 1 Abtastung letztes Mal haben wir gesehen: 3,9 khz kaum noch hörbar bei 8 khz Abtastrate.
Praxiswerkstatt Algorithmen der Signalcodierung 2. Termin Themen heute: Abtastung Lineare Zeitinvariante Systeme Seite 1 Abtastung letztes Mal haben wir gesehen: 3,9 khz kaum noch hörbar bei 8 khz Abtastrate.
Abtastung. Normalisierte Kreisfrequenz = DSP_9-Abtasttheorem 2
 Abtasttheorem Abtastung xn [ ] = xnt ( ) = Acos( ωnt+ ϕ) = Acos( ωˆ n+ ϕ) s s Normalisierte Kreisfrequenz ωˆ = ωt s DSP_9-Abtasttheorem 2 Normalisierte Kreisfrequenz ω hat die Einheit rad/sec, ω ˆ = ωt
Abtasttheorem Abtastung xn [ ] = xnt ( ) = Acos( ωnt+ ϕ) = Acos( ωˆ n+ ϕ) s s Normalisierte Kreisfrequenz ωˆ = ωt s DSP_9-Abtasttheorem 2 Normalisierte Kreisfrequenz ω hat die Einheit rad/sec, ω ˆ = ωt
3. Vorlesung. Systemtheorie für Informatiker. Dr. Christoph Grimm. Professur Prof. Dr. K. Waldschmidt, Univ. Frankfurt/Main
 3. Vorlesung Systemtheorie für Informatiker Dr. Christoph Grimm Professur Prof. Dr. K. Waldschmidt, Univ. Frankfurt/Main Letzte Woche: Systemeigenschaften, Superpositionsprinzip Systemklassen: DESS, DEVS,
3. Vorlesung Systemtheorie für Informatiker Dr. Christoph Grimm Professur Prof. Dr. K. Waldschmidt, Univ. Frankfurt/Main Letzte Woche: Systemeigenschaften, Superpositionsprinzip Systemklassen: DESS, DEVS,
filter Filter Ziele Parameter Entwurf
 1 Filter Ziele Parameter Entwurf 2.3.2007 2 Beschreibung Pol-Nullstellen- Diagramm Übertragungsfunktion H(z) Differenzengleichung y(n) Impulsantwort h(n): Finite Impulse Response (FIR) Infinite Impulse
1 Filter Ziele Parameter Entwurf 2.3.2007 2 Beschreibung Pol-Nullstellen- Diagramm Übertragungsfunktion H(z) Differenzengleichung y(n) Impulsantwort h(n): Finite Impulse Response (FIR) Infinite Impulse
Test = 28 Punkte. 1: 2: 3: 4: 5: Punkte: Note:
 ZHAW, DSV1, FS2010, Rumc, 1 Test 1 5 + 5 + 5 + 8 + 5 = 28 Punkte Name: Vorname: 1: 2: : 4: 5: Punkte: Note: Aufgabe 1: AD-DA-System. + 1 + 1 = 5 Punkte Das analoge Signal x a (t) = cos(2πf 0 t), f 0 =750
ZHAW, DSV1, FS2010, Rumc, 1 Test 1 5 + 5 + 5 + 8 + 5 = 28 Punkte Name: Vorname: 1: 2: : 4: 5: Punkte: Note: Aufgabe 1: AD-DA-System. + 1 + 1 = 5 Punkte Das analoge Signal x a (t) = cos(2πf 0 t), f 0 =750
Multimedia Systeme. Dr. The Anh Vuong. http: Multimedia Systeme. Dr. The Anh Vuong
 email: av@dr-vuong.de http: www.dr-vuong.de 2001-2006 by, Seite 1 Multimedia-Application Applications Software Networks Authoringssofware, Contentmangement, Imagesprocessing, Viewer, Browser... Network-Architecture,
email: av@dr-vuong.de http: www.dr-vuong.de 2001-2006 by, Seite 1 Multimedia-Application Applications Software Networks Authoringssofware, Contentmangement, Imagesprocessing, Viewer, Browser... Network-Architecture,
Signale und Systeme. Martin Werner
 Martin Werner Signale und Systeme Lehr- und Arbeitsbuch mit MATLAB -Übungen und Lösungen 3., vollständig überarbeitete und erweiterte Auflage Mit 256 Abbildungen, 48 Tabellen und zahlreichen Beispielen,
Martin Werner Signale und Systeme Lehr- und Arbeitsbuch mit MATLAB -Übungen und Lösungen 3., vollständig überarbeitete und erweiterte Auflage Mit 256 Abbildungen, 48 Tabellen und zahlreichen Beispielen,
Digitale Signalverarbeitung Bernd Edler
 Digitale Signalverarbeitung Bernd Edler Wintersemester 2008/2009 Wesentliche Inhalte der Vorlesung Abtastung z-transformation Lineare zeitinvariante Systeme Diskrete Fouriertransformation Systeme bei stochastischer
Digitale Signalverarbeitung Bernd Edler Wintersemester 2008/2009 Wesentliche Inhalte der Vorlesung Abtastung z-transformation Lineare zeitinvariante Systeme Diskrete Fouriertransformation Systeme bei stochastischer
Regelungstechnik : Vorlesung 10
 Regelungstechnik : Vorlesung 10 Umgang mit Beschränkungen der Aktoren Alle Aktoren haben gewisse Beschränkungen. Sie sind beispielsweise in ihrer Amplitude oder Dynamik beschränkt. Das Missachten von Stellgrößenbegrenzung
Regelungstechnik : Vorlesung 10 Umgang mit Beschränkungen der Aktoren Alle Aktoren haben gewisse Beschränkungen. Sie sind beispielsweise in ihrer Amplitude oder Dynamik beschränkt. Das Missachten von Stellgrößenbegrenzung
Digitale Signalverarbeitung Bernd Edler
 Digitale Signalverarbeitung Bernd Edler Wintersemester 2007/2008 Wesentliche Inhalte der Vorlesung Abtastung z-transformation Lineare zeitinvariante Systeme Diskrete Fouriertransformation Systeme bei stochastischer
Digitale Signalverarbeitung Bernd Edler Wintersemester 2007/2008 Wesentliche Inhalte der Vorlesung Abtastung z-transformation Lineare zeitinvariante Systeme Diskrete Fouriertransformation Systeme bei stochastischer
Digitale Signalverarbeitung Bernd Edler
 Digitale Signalverarbeitung Bernd Edler Wintersemester 2010/2011 Wesentliche Inhalte der Vorlesung Abtastung z-transformation Lineare zeitinvariante Systeme Diskrete Fouriertransformation Filterentwurf
Digitale Signalverarbeitung Bernd Edler Wintersemester 2010/2011 Wesentliche Inhalte der Vorlesung Abtastung z-transformation Lineare zeitinvariante Systeme Diskrete Fouriertransformation Filterentwurf
Zusammenfassung der 2. Vorlesung
 Zusammenfassung der 2. Vorlesung Fourier-Transformation versus Laplace-Transformation Spektrum kontinuierlicher Signale Das Spektrum gibt an, welche Frequenzen in einem Signal vorkommen und welches Gewicht
Zusammenfassung der 2. Vorlesung Fourier-Transformation versus Laplace-Transformation Spektrum kontinuierlicher Signale Das Spektrum gibt an, welche Frequenzen in einem Signal vorkommen und welches Gewicht
Einführung in die Systemtheorie
 Bernd Girod, Rudolf Rabenstein, Alexander Stenger Einführung in die Systemtheorie Signale und Systeme in der Elektrotechnik und Informationstechnik 4., durchgesehene und aktualisierte Auflage Mit 388 Abbildungen
Bernd Girod, Rudolf Rabenstein, Alexander Stenger Einführung in die Systemtheorie Signale und Systeme in der Elektrotechnik und Informationstechnik 4., durchgesehene und aktualisierte Auflage Mit 388 Abbildungen
Kontrollfragen zum Skript Teil 1 beantwortet
 Kontrollfragen zum Skript Teil 1 beantwortet Von J.S. Hussmann Fragen zu SW 1.1 Welche Vorteile hat die DSVB? Programmierbar Parametrierbar Reproduzierbar Wie heisst die Umwandlung eines Zeit-diskreten
Kontrollfragen zum Skript Teil 1 beantwortet Von J.S. Hussmann Fragen zu SW 1.1 Welche Vorteile hat die DSVB? Programmierbar Parametrierbar Reproduzierbar Wie heisst die Umwandlung eines Zeit-diskreten
Vor- und Nachteile FIR- und IIR-Filter DSV 1, 2005/01, Rur, Filterentwurf, 1. Filterspezifikation DSV 1, 2005/01, Rur, Filterentwurf, 2
 Vor- und Nachteile FIR- und IIR-Filter DSV 1, 2005/01, Rur, Filterentwurf, 1 Filterspezifikation DSV 1, 2005/01, Rur, Filterentwurf, 2 FIR-Filter sind nichtrekursive LTD-Systeme werden meistens in Transversalstruktur
Vor- und Nachteile FIR- und IIR-Filter DSV 1, 2005/01, Rur, Filterentwurf, 1 Filterspezifikation DSV 1, 2005/01, Rur, Filterentwurf, 2 FIR-Filter sind nichtrekursive LTD-Systeme werden meistens in Transversalstruktur
Zusammenfassung der 1. Vorlesung
 Zusammenfassung der 1. Vorlesung Einordnung und Motivation Grundlegende Definitionen Kontinuierliches Signal Zeitdiskretes Signal Quantisiertes Signal Digitales Signal Kontinuierliches System Abtastsystem
Zusammenfassung der 1. Vorlesung Einordnung und Motivation Grundlegende Definitionen Kontinuierliches Signal Zeitdiskretes Signal Quantisiertes Signal Digitales Signal Kontinuierliches System Abtastsystem
Signale und Systeme. von Prof Dr. Uwe Kiencke, Dr.-lng. HolgerJakel 4., korrigierte Auflage. Oldenbourg Verlag Munchen
 Signale und Systeme von Prof Dr. Uwe Kiencke, Dr.-lng. HolgerJakel 4., korrigierte Auflage Oldenbourg Verlag Munchen I Einfuhrung 1 1 Einleitung 3 1.1 Signale 4 1.2 Systeme 4 1.3 Signalverarbeitung 6 1.4
Signale und Systeme von Prof Dr. Uwe Kiencke, Dr.-lng. HolgerJakel 4., korrigierte Auflage Oldenbourg Verlag Munchen I Einfuhrung 1 1 Einleitung 3 1.1 Signale 4 1.2 Systeme 4 1.3 Signalverarbeitung 6 1.4
Signale und Systeme I
 FACULTY OF ENGNEERING CHRISTIAN-ALBRECHTS-UNIVERSITÄT ZU KIEL DIGITAL SIGNAL PROCESSING AND SYSTEM THEORY DSS Signale und Systeme I Musterlösung zur Modulklausur WS 010/011 Prüfer: Prof. Dr.-Ing. Gerhard
FACULTY OF ENGNEERING CHRISTIAN-ALBRECHTS-UNIVERSITÄT ZU KIEL DIGITAL SIGNAL PROCESSING AND SYSTEM THEORY DSS Signale und Systeme I Musterlösung zur Modulklausur WS 010/011 Prüfer: Prof. Dr.-Ing. Gerhard
Signale und Systeme. Grundlagen und Anwendungen mit MATLAB
 Signale und Systeme Grundlagen und Anwendungen mit MATLAB Von Professor Dr.-Ing. Dr. h. c. Norbert Fliege und Dr.-Ing. Markus Gaida Universität Mannheim Mit 374 Bildern, 8 Tabellen und 38 MATLAB-Projekten
Signale und Systeme Grundlagen und Anwendungen mit MATLAB Von Professor Dr.-Ing. Dr. h. c. Norbert Fliege und Dr.-Ing. Markus Gaida Universität Mannheim Mit 374 Bildern, 8 Tabellen und 38 MATLAB-Projekten
6. Vorlesung. Systemtheorie für Informatiker. Dr. Christoph Grimm. Professur Prof. Dr. K. Waldschmidt, Univ. Frankfurt/Main
 6. Vorlesung Systemtheorie für Informatiker Dr. Christoph Grimm Professur Prof. Dr. K. Waldschmidt, Univ. Frankfurt/Main Letzte Woche: Letzte Woche: 1.) Erweiterung von Fourier- zu Laplace-Transformation
6. Vorlesung Systemtheorie für Informatiker Dr. Christoph Grimm Professur Prof. Dr. K. Waldschmidt, Univ. Frankfurt/Main Letzte Woche: Letzte Woche: 1.) Erweiterung von Fourier- zu Laplace-Transformation
Zeitdiskrete Signalverarbeitung
 Zeitdiskrete Signalverarbeitung Ideale digitale Filter Dr.-Ing. Jörg Schmalenströer Fachgebiet Nachrichtentechnik - Universität Paderborn Prof. Dr.-Ing. Reinhold Haeb-Umbach 7. September 217 Übersicht
Zeitdiskrete Signalverarbeitung Ideale digitale Filter Dr.-Ing. Jörg Schmalenströer Fachgebiet Nachrichtentechnik - Universität Paderborn Prof. Dr.-Ing. Reinhold Haeb-Umbach 7. September 217 Übersicht
LTI-Systeme in Frequenzbereich und Zeitbereich
 LTI-Systeme in Frequenzbereich und Zeitbereich LTI-Systeme Frequenzgang, Filter Impulsfunktion und Impulsantwort, Faltung, Fourier-Transformation Spektrum, Zeitdauer-Bandbreite-Produkt Übungen Literatur
LTI-Systeme in Frequenzbereich und Zeitbereich LTI-Systeme Frequenzgang, Filter Impulsfunktion und Impulsantwort, Faltung, Fourier-Transformation Spektrum, Zeitdauer-Bandbreite-Produkt Übungen Literatur
4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter
 4 Signalverarbeitung 4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter Weiterführende Literatur (z.b.): Beate Meffert, Olaf Hochmuth: Werkzeuge
4 Signalverarbeitung 4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter Weiterführende Literatur (z.b.): Beate Meffert, Olaf Hochmuth: Werkzeuge
Systemtheorie Teil B
 d + d z + c d z + c uk d + + yk z d + c d z + c Systemtheorie eil B - Zeitdiskrete Signale und Systeme - Musterlösungen Manfred Strohrmann Urban Brunner Inhalt Musterlösungen - Signalabtastung und Rekonstruktion...
d + d z + c d z + c uk d + + yk z d + c d z + c Systemtheorie eil B - Zeitdiskrete Signale und Systeme - Musterlösungen Manfred Strohrmann Urban Brunner Inhalt Musterlösungen - Signalabtastung und Rekonstruktion...
Systemtheorie Teil B
 d + d z + c d z + c uk d + + yk z d + c d z + c Systemtheorie Teil B - Zeitdiskrete Signale und Systeme Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Übungsaufgaben - Signalabtastung und Rekonstruktion...
d + d z + c d z + c uk d + + yk z d + c d z + c Systemtheorie Teil B - Zeitdiskrete Signale und Systeme Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Übungsaufgaben - Signalabtastung und Rekonstruktion...
Zusammenfassung der 1. Vorlesung
 Zusammenfassung der. Vorlesung Einordnung und Motivation Grundlegende Definitionen Kontinuierliches Signal Quantisiertes Signal Zeitdiskretes Signal Digitales Signal Auflösung der A/D- Umsetzer der MicroAutoBox
Zusammenfassung der. Vorlesung Einordnung und Motivation Grundlegende Definitionen Kontinuierliches Signal Quantisiertes Signal Zeitdiskretes Signal Digitales Signal Auflösung der A/D- Umsetzer der MicroAutoBox
Übungseinheit 3. FIR und IIR Filter
 Übungseinheit 3 FIR und IIR Filter In dieser Übungseinheit sollen verschiedene Effekte mittels FIR (finite impulse response) und IIR (infinite impulse response) Filter implementiert werden. FIR Filter
Übungseinheit 3 FIR und IIR Filter In dieser Übungseinheit sollen verschiedene Effekte mittels FIR (finite impulse response) und IIR (infinite impulse response) Filter implementiert werden. FIR Filter
System- und Signaltheorie
 Otto Mildenberger System- und Signaltheorie Grundlagen für das informationstechnische Studium 3., überarbeitete und erweiterte Auflage Mit 166 Bildern vieweg 1 Einleitung 1 1.1 Aufgaben der Systemtheorie
Otto Mildenberger System- und Signaltheorie Grundlagen für das informationstechnische Studium 3., überarbeitete und erweiterte Auflage Mit 166 Bildern vieweg 1 Einleitung 1 1.1 Aufgaben der Systemtheorie
3. Informationsverarbeitung in Objekten
 3. Informationsverarbeitung in Objekten 1 3.1. Abtastung von Signalen an der Schnittstelle 2 Falls System an einen Rechner angeschlossen ist wert- und zeit-diskrete Signale x * (t k ) = abstrakte Zahlen
3. Informationsverarbeitung in Objekten 1 3.1. Abtastung von Signalen an der Schnittstelle 2 Falls System an einen Rechner angeschlossen ist wert- und zeit-diskrete Signale x * (t k ) = abstrakte Zahlen
Aufgabe: Summe Punkte (max.): Punkte:
: Punkte:") ZUNAME:.................................... VORNAME:.................................... MAT. NR.:................................... 2. Teilprüfung 389.055 B Signale und Systeme 2 Institute of Telecommunications
ZUNAME:.................................... VORNAME:.................................... MAT. NR.:................................... 2. Teilprüfung 389.055 B Signale und Systeme 2 Institute of Telecommunications
Aufgabe: Summe Punkte (max.): Punkte:
: Punkte:") ZUNAME:.................................... VORNAME:.................................... MAT. NR.:................................... 2. Teilprüfung 389.055 A Signale und Systeme 2 Institute of Telecommunications
ZUNAME:.................................... VORNAME:.................................... MAT. NR.:................................... 2. Teilprüfung 389.055 A Signale und Systeme 2 Institute of Telecommunications
ZHAW, DSV1, FS2010, Rumc, 1. H(z) a) Zeichnen Sie direkt auf das Aufgabenblatt das Betragsspektrum an der Stelle 1.
 a) Zeichnen Sie direkt auf das Aufgabenblatt das Betragsspektrum an der Stelle 1.") ZHAW, DSV, FS200, Rumc, DSV Modulprüfung 7 + 4 + 5 + 8 + 6 = 30 Punkte Name: Vorname: : 2: 3: 4: 5: Punkte: Note: Aufgabe : AD-DA-Umsetzung. + + +.5 +.5 + = 7 Punkte Betrachten Sie das folgende digitale
ZHAW, DSV, FS200, Rumc, DSV Modulprüfung 7 + 4 + 5 + 8 + 6 = 30 Punkte Name: Vorname: : 2: 3: 4: 5: Punkte: Note: Aufgabe : AD-DA-Umsetzung. + + +.5 +.5 + = 7 Punkte Betrachten Sie das folgende digitale
6Si 6. Signal-und Bildfilterung sowie. H. Burkhardt, Institut für Informatik, Universität Freiburg DBV-I 1
 6Si 6. Signal-und Bildfilterung sowie Korrelation H. Burkhardt, Institut für Informatik, Universität Freiburg DBV-I Bildfilterung und Korrelation Die lineare Bildfilterung wird zur Rauschunterdrückung
6Si 6. Signal-und Bildfilterung sowie Korrelation H. Burkhardt, Institut für Informatik, Universität Freiburg DBV-I Bildfilterung und Korrelation Die lineare Bildfilterung wird zur Rauschunterdrückung
Vorwort. I Einführung 1. 1 Einleitung Signale Systeme Signalverarbeitung Struktur des Buches 9. 2 Mathematische Grundlagen 11
 Vorwort V I Einführung 1 1 Einleitung 3 1.1 Signale 4 1.2 Systeme 4 1.3 Signalverarbeitung 6 1.4 Struktur des Buches 9 2 Mathematische Grundlagen 11 2.1 Räume 11 2.1.1 Metrischer Raum 12 2.1.2 Linearer
Vorwort V I Einführung 1 1 Einleitung 3 1.1 Signale 4 1.2 Systeme 4 1.3 Signalverarbeitung 6 1.4 Struktur des Buches 9 2 Mathematische Grundlagen 11 2.1 Räume 11 2.1.1 Metrischer Raum 12 2.1.2 Linearer
Abschlussprüfung Digitale Signalverarbeitung. Aufgaben, die mit einem * gekennzeichnet sind, lassen sich unabhängig von anderen Teilaufgaben lösen.
 Name: Abschlussprüfung Digitale Signalverarbeitung Studiengang: Elektrotechnik IK, E/ME Wahlfach SS2015 Prüfungstermin: Prüfer: Hilfsmittel: 3.7.2015 (90 Minuten) Prof. Dr.-Ing. Großmann, Prof. Dr.-Ing.
Name: Abschlussprüfung Digitale Signalverarbeitung Studiengang: Elektrotechnik IK, E/ME Wahlfach SS2015 Prüfungstermin: Prüfer: Hilfsmittel: 3.7.2015 (90 Minuten) Prof. Dr.-Ing. Großmann, Prof. Dr.-Ing.
Systemtheorie Teil A. - Zeitkontinuierliche Signale und Systeme - Musterlösungen. Manfred Strohrmann Urban Brunner
 Systemtheorie Teil A - Zeitkontinuierliche Signale und Systeme - Musterlösungen Manfred Strohrmann Urban Brunner Inhalt 6 Musterlösungen Spektrum von Signalen 6. Approximation eines periodischen Signals
Systemtheorie Teil A - Zeitkontinuierliche Signale und Systeme - Musterlösungen Manfred Strohrmann Urban Brunner Inhalt 6 Musterlösungen Spektrum von Signalen 6. Approximation eines periodischen Signals
Beispiel-Klausuraufgaben Digitale Signalverarbeitung. Herbst 2008
 Beispiel-Klausuraufgaben Digitale Signalverarbeitung Herbst 8 Zeitdauer: Hilfsmittel: Stunden Formelsammlung Taschenrechner (nicht programmiert) eine DIN A4-Seite mit beliebigem Text oder Formeln (beidseitig)
Beispiel-Klausuraufgaben Digitale Signalverarbeitung Herbst 8 Zeitdauer: Hilfsmittel: Stunden Formelsammlung Taschenrechner (nicht programmiert) eine DIN A4-Seite mit beliebigem Text oder Formeln (beidseitig)
Einführung in die Elektronik für Physiker
 Hartmut Gemmeke Forschungszentrum Karlsruhe, IPE hartmut.gemmeke@kit.edu Tel.: 07247-82-5635 Einführung in die Elektronik für Physiker 22. Analog-Digital-Wandlung und digitale Filter Digitale Datenerfassung
Hartmut Gemmeke Forschungszentrum Karlsruhe, IPE hartmut.gemmeke@kit.edu Tel.: 07247-82-5635 Einführung in die Elektronik für Physiker 22. Analog-Digital-Wandlung und digitale Filter Digitale Datenerfassung
Klausur zur Vorlesung Digitale Signalverarbeitung
 INSTITUT FÜR THEORETISCHE NACHRICHTENTECHNIK UND INFORMATIONSVERARBEITUNG UNIVERSITÄT HANNOVER Appelstraße 9A 3067 Hannover Klausur zur Vorlesung Digitale Signalverarbeitung Datum: 5.0.005 Uhrzeit: 09:00
INSTITUT FÜR THEORETISCHE NACHRICHTENTECHNIK UND INFORMATIONSVERARBEITUNG UNIVERSITÄT HANNOVER Appelstraße 9A 3067 Hannover Klausur zur Vorlesung Digitale Signalverarbeitung Datum: 5.0.005 Uhrzeit: 09:00
Schnelle Fouriertransformation (FFT)
") Schnelle Fouriertransformation (FFT) Inhaltsverzeichnis 1 Schnelle Fouriertransformation (FFT)... 3 1.1 Das Realtime-Konzept der Goldammer-Messkarten... 3 1.2 Das Abtasttheorem oder Regeln für die Abtastung
Schnelle Fouriertransformation (FFT) Inhaltsverzeichnis 1 Schnelle Fouriertransformation (FFT)... 3 1.1 Das Realtime-Konzept der Goldammer-Messkarten... 3 1.2 Das Abtasttheorem oder Regeln für die Abtastung
Beate Meffert, Olaf Hochmuth: Werkzeuge der Signalverarbeitung, Pearson 2004
 4 Signalverarbeitung 4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter Weiterführende Literatur (z.b.): Beate Meffert, Olaf Hochmuth: Werkzeuge
4 Signalverarbeitung 4.1 Grundbegriffe 4.2 Frequenzspektren, Fourier-Transformation 4.3 Abtasttheorem: Eine zweite Sicht 4.4 Filter Weiterführende Literatur (z.b.): Beate Meffert, Olaf Hochmuth: Werkzeuge
Grundlagen der Informationstechnik
 Martin Meyer Grundlagen der Informationstechnik Signale, Systeme und Filter Mit 250 Abbildungen und 33 Tabellen Herausgegeben von Otto Mildenberger Vieweg Praxiswissen Vieweg VII 1 Einführung 1 1.1 Das
Martin Meyer Grundlagen der Informationstechnik Signale, Systeme und Filter Mit 250 Abbildungen und 33 Tabellen Herausgegeben von Otto Mildenberger Vieweg Praxiswissen Vieweg VII 1 Einführung 1 1.1 Das
filter Filter Ziele Parameter Entwurf Zölzer (2002) Nov 14, 2015
 Nov 14, 2015") 1 Filter Ziele Parameter Entwurf Zölzer (2002) Nov 14, 2015 2 Beschreibung Übertragungsfunktion H(z), H(ω) Differenzengleichung y[n] Impulsantwort h[n]: Finite Infinite Impulse Response (FIR) Impulse Response
1 Filter Ziele Parameter Entwurf Zölzer (2002) Nov 14, 2015 2 Beschreibung Übertragungsfunktion H(z), H(ω) Differenzengleichung y[n] Impulsantwort h[n]: Finite Infinite Impulse Response (FIR) Impulse Response
Vortrag der Diplomarbeit
 Vortrag der Diplomarbeit Entwicklung eines Continuous-Time Delta- Sigma Modulators für den Einsatz in der Positronen-Emissions-Tomographie von 07.09.2009 Überblick und Gliedergung: Teil 1: CT ΔΣ Modulator
Vortrag der Diplomarbeit Entwicklung eines Continuous-Time Delta- Sigma Modulators für den Einsatz in der Positronen-Emissions-Tomographie von 07.09.2009 Überblick und Gliedergung: Teil 1: CT ΔΣ Modulator
2 Signalabtastung und Rekonstruktion
 Signalabtastung und Rekonstruktion Signalabtastung und Rekonstruktion In vielen praktischen Anwendungen werden analoge Signale mit digitalen Systemen wie z.b. Computern oder Mikro-Controllern erfasst und
Signalabtastung und Rekonstruktion Signalabtastung und Rekonstruktion In vielen praktischen Anwendungen werden analoge Signale mit digitalen Systemen wie z.b. Computern oder Mikro-Controllern erfasst und
Theorie digitaler Systeme
 Theorie digitaler Systeme Vorlesung 1: Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Vergleich zeitkontinuierlicher und zeitdiskreter Systeme Systemtheorie hat zeitkontinuierliche Systeme
Theorie digitaler Systeme Vorlesung 1: Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Vergleich zeitkontinuierlicher und zeitdiskreter Systeme Systemtheorie hat zeitkontinuierliche Systeme
Audio-Bearbeitung. Diese Freq. Anteile «verschwinden» nach dem unterabtasten Filter muß schmal genug sein! Nach Unterabtastung
 Audio Signal Audio-Bearbeitung Ampl Vor Unterabtastung Teilband Grenzen Normierte Frequenz (normierte Abtastrate, maximale Frequenz ist pi oder 1) Teilbänder Diese Freq. Anteile «verschwinden» nach dem
Audio Signal Audio-Bearbeitung Ampl Vor Unterabtastung Teilband Grenzen Normierte Frequenz (normierte Abtastrate, maximale Frequenz ist pi oder 1) Teilbänder Diese Freq. Anteile «verschwinden» nach dem
3. Quantisierte IIR-Filter R
 . Zweierkomplement a) Wie sieht die binäre Darstellung von -5 aus bei den Wortbreiten b = 4, b =, b = 6? b) Berechnen Sie folgende Additionen im Format SINT(4). Geben Sie bei Überlauf auch die Ausgaben
. Zweierkomplement a) Wie sieht die binäre Darstellung von -5 aus bei den Wortbreiten b = 4, b =, b = 6? b) Berechnen Sie folgende Additionen im Format SINT(4). Geben Sie bei Überlauf auch die Ausgaben
Einführung in die digitale Signalverarbeitung WS11/12
 Einführung in die digitale Signalverarbeitung WS11/12 Prof. Dr. Stefan Weinzierl Musterlösung 11. Aufgabenblatt 1. IIR-Filter 1.1 Laden Sie in Matlab eine Audiodatei mit Sampling-Frequenz von fs = 44100
Einführung in die digitale Signalverarbeitung WS11/12 Prof. Dr. Stefan Weinzierl Musterlösung 11. Aufgabenblatt 1. IIR-Filter 1.1 Laden Sie in Matlab eine Audiodatei mit Sampling-Frequenz von fs = 44100
Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT)
") Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT) Ziele In diesem Versuch lernen Sie zwei Anwendungen der Diskreten Fourier-Transformation in der Realisierung als recheneffiziente schnelle
Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT) Ziele In diesem Versuch lernen Sie zwei Anwendungen der Diskreten Fourier-Transformation in der Realisierung als recheneffiziente schnelle
Digitale Signalverarbeitung auf FPGAs
 Digitale Signalverarbeitung auf FPGAs INP: Interpolation Upsampling und D/A- Wandlung Teil 1 Upsampling 2016 Dr. Christian Münker INP: Überblick Upsampling D/A-Wandlung Interpolation Oversampling (Sigma-Delta
Digitale Signalverarbeitung auf FPGAs INP: Interpolation Upsampling und D/A- Wandlung Teil 1 Upsampling 2016 Dr. Christian Münker INP: Überblick Upsampling D/A-Wandlung Interpolation Oversampling (Sigma-Delta
Grundlagen der Signalverarbeitung
 Grundlagen der Signalverarbeitung Digitale und analoge Filter Wintersemester 6/7 Wiederholung Übertragung eines sinusförmigen Signals u t = U sin(ω t) y t = Y sin ω t + φ ω G(ω) Amplitude: Y = G ω U Phase:
Grundlagen der Signalverarbeitung Digitale und analoge Filter Wintersemester 6/7 Wiederholung Übertragung eines sinusförmigen Signals u t = U sin(ω t) y t = Y sin ω t + φ ω G(ω) Amplitude: Y = G ω U Phase:
FH Jena Prüfungsaufgaben - Master Prof. Giesecke FB ET/IT Digitale Signalverarbeitung SS 2012
 FB ET/IT Digitale Signalverarbeitung SS 0 Name, Vorname: Matr.-Nr.: Zugelassene Hilfsmittel: beliebiger Taschenrechner ein mathematisches Formelwerk eine selbsterstellte Formelsammlung Wichtige Hinweise:
FB ET/IT Digitale Signalverarbeitung SS 0 Name, Vorname: Matr.-Nr.: Zugelassene Hilfsmittel: beliebiger Taschenrechner ein mathematisches Formelwerk eine selbsterstellte Formelsammlung Wichtige Hinweise:
Zeitdiskrete Signalverarbeitung
 Alan V. Oppenheim, Ronald W. Schafer, John R. Buck Zeitdiskrete Signalverarbeitung 2., überarbeitete Auflage ein Imprint von Pearson Education München Boston San Francisco Harlow, England Don Mills, Ontario
Alan V. Oppenheim, Ronald W. Schafer, John R. Buck Zeitdiskrete Signalverarbeitung 2., überarbeitete Auflage ein Imprint von Pearson Education München Boston San Francisco Harlow, England Don Mills, Ontario
2. Digitale Codierung und Übertragung
 2. Digitale Codierung und Übertragung 2.1 Informationstheoretische Grundlagen 2.2 Speicherbedarf und Kompression 2.3 Digitalisierung Ludwig-Maximilians-Universität München Prof. Hußmann Digitale Medien
2. Digitale Codierung und Übertragung 2.1 Informationstheoretische Grundlagen 2.2 Speicherbedarf und Kompression 2.3 Digitalisierung Ludwig-Maximilians-Universität München Prof. Hußmann Digitale Medien
Funktion von Delta-Sigma-Wandlern zur Digitaliserung eines analogen Sensorsignals mit einer praktischen Anwendung. Dr.
 Funktion von Delta-Sigma-Wandlern zur Digitaliserung eines analogen Sensorsignals mit einer praktischen Anwendung Dr. Thomas Komarek 1 Übersicht Praktische Anwendung: Super Audio Compact Disc (SACD) Grundlagen
Funktion von Delta-Sigma-Wandlern zur Digitaliserung eines analogen Sensorsignals mit einer praktischen Anwendung Dr. Thomas Komarek 1 Übersicht Praktische Anwendung: Super Audio Compact Disc (SACD) Grundlagen
ÜBUNG 2: Z-TRANSFORMATION, SYSTEMSTRUKTUREN
 ÜBUNG : Z-TRANSFORMATION, SYSTEMSTRUKTUREN 8. AUFGABE Bestimmen Sie die Systemfunktion H(z) aus den folgenden linearen Differenzengleichungen: a) b) y(n) = 3x(n) x(n ) + x(n 3) y(n ) + y(n 3) 3y(n ) y(n)
ÜBUNG : Z-TRANSFORMATION, SYSTEMSTRUKTUREN 8. AUFGABE Bestimmen Sie die Systemfunktion H(z) aus den folgenden linearen Differenzengleichungen: a) b) y(n) = 3x(n) x(n ) + x(n 3) y(n ) + y(n 3) 3y(n ) y(n)
Digitale Signalverarbeitung sehen, hören und verstehen
 Digitale Signalverarbeitung sehen, hören und verstehen Hans-Günter Hirsch Hochschule Niederrhein, Krefeld email: hans-guenter.hirsch@hs-niederrhein.de http://dnt.kr.hs-niederrhein.de Folie 1 Gliederung
Digitale Signalverarbeitung sehen, hören und verstehen Hans-Günter Hirsch Hochschule Niederrhein, Krefeld email: hans-guenter.hirsch@hs-niederrhein.de http://dnt.kr.hs-niederrhein.de Folie 1 Gliederung
Digitale Signalverarbeitung
 Karl-Dirk Kammeyer, Kristian Kroschel Digitale Signalverarbeitung Filterung und Spektralanalyse mit MATLAB-Übungen 6., korrigierte und ergänzte Auflage Mit 315 Abbildungen und 33 Tabellen Teubner Inhaltsverzeichnis
Karl-Dirk Kammeyer, Kristian Kroschel Digitale Signalverarbeitung Filterung und Spektralanalyse mit MATLAB-Übungen 6., korrigierte und ergänzte Auflage Mit 315 Abbildungen und 33 Tabellen Teubner Inhaltsverzeichnis
Entwicklung einer digitalen Übertragungsstrecke mit Einplatinencomputern zur Signalanalyse
 Entwicklung einer digitalen mit Einplatinencomputern zur Signalanalyse Philipp Urban Jacobs p.1 Inhalt 1 Motivation 2 Grundlagen 3 Umsetzung 4 Verifizierung 5 Fazit p.2 Motivation Signalgenerator ADC Gertboard
Entwicklung einer digitalen mit Einplatinencomputern zur Signalanalyse Philipp Urban Jacobs p.1 Inhalt 1 Motivation 2 Grundlagen 3 Umsetzung 4 Verifizierung 5 Fazit p.2 Motivation Signalgenerator ADC Gertboard
Warum z-transformation?
 -Transformation Warum -Transformation? Die -Transformation führt Polynome und rationale Funktionen in die Analyse der linearen eitdiskreten Systeme ein. Die Faltung geht über in die Multiplikation von
-Transformation Warum -Transformation? Die -Transformation führt Polynome und rationale Funktionen in die Analyse der linearen eitdiskreten Systeme ein. Die Faltung geht über in die Multiplikation von
und mit t in Sekunden wird mit einer Frequenz von 8000 Hz abgetastet. Die Abtastung beginnt bei t=0 mit dem Zeitindex n=0.
 Aufgabe 1 Das periodische Signal x t) 0,5 sin(2 f t) 0,5 cos(2 f t) mit f 1000Hz und mit f 2000Hz ( 1 2 1 2 und mit t in Sekunden wird mit einer Frequenz von 8000 Hz abgetastet. Die Abtastung beginnt bei
Aufgabe 1 Das periodische Signal x t) 0,5 sin(2 f t) 0,5 cos(2 f t) mit f 1000Hz und mit f 2000Hz ( 1 2 1 2 und mit t in Sekunden wird mit einer Frequenz von 8000 Hz abgetastet. Die Abtastung beginnt bei
Faltung, Bildbereich und Stabilität
 Fakultät Informatik Institut für Angewandte Informatik, Professur für Technische Informationssysteme Faltung, Bildbereich und Stabilität Dresden, den 03.08.2011 Gliederung Vorbemerkungen Faltung Bildbereich
Fakultät Informatik Institut für Angewandte Informatik, Professur für Technische Informationssysteme Faltung, Bildbereich und Stabilität Dresden, den 03.08.2011 Gliederung Vorbemerkungen Faltung Bildbereich
Signale und Systeme. Christoph Becker
 Signale und Systeme Christoph Becker 18102012 Signale Definition 1 Ein Signal ist eine Folge von Zahlen {xn)} welche die Bedingung xn) < erfüllt Definition 2 Der Frequenzgang / frequency domain representation
Signale und Systeme Christoph Becker 18102012 Signale Definition 1 Ein Signal ist eine Folge von Zahlen {xn)} welche die Bedingung xn) < erfüllt Definition 2 Der Frequenzgang / frequency domain representation
Einführung in die digitale Signalverarbeitung
 Einführung in die digitale Signalverarbeitung Prof. Dr. Stefan Weinzierl 1. Aufgabenblatt 1. Eigenschaften diskreter Systeme a. Erläutern Sie die Begriffe Linearität Zeitinvarianz Speicherfreiheit Kausalität
Einführung in die digitale Signalverarbeitung Prof. Dr. Stefan Weinzierl 1. Aufgabenblatt 1. Eigenschaften diskreter Systeme a. Erläutern Sie die Begriffe Linearität Zeitinvarianz Speicherfreiheit Kausalität
Digitale Signalverarbeitung für Einsteiger Teil 2
 Digitale Signalverarbeitung für Einsteiger Teil 2 Dipl.-Ing. Erich H. Franke, DK6II erich.franke@afusoft.com 55. Weinheimer UKW-Tagung 2010 RTTY: Ein kurzes Update Spektrale Breite im Funkkanal: B = 235
Digitale Signalverarbeitung für Einsteiger Teil 2 Dipl.-Ing. Erich H. Franke, DK6II erich.franke@afusoft.com 55. Weinheimer UKW-Tagung 2010 RTTY: Ein kurzes Update Spektrale Breite im Funkkanal: B = 235
Eigenschaften und Anwendung zeitdiskreter Systeme
 Fakultät Informatik Institut für Angewandte Informatik, Professur für Technische Informationssysteme Eigenschaften und Anwendung zeitdiskreter Systeme Dresden, den 3.8.2 Gliederung Vorbemerkungen Eigenschaften
Fakultät Informatik Institut für Angewandte Informatik, Professur für Technische Informationssysteme Eigenschaften und Anwendung zeitdiskreter Systeme Dresden, den 3.8.2 Gliederung Vorbemerkungen Eigenschaften
Filterentwurf. Bernd Edler Laboratorium für Informationstechnologie DigSig - Teil 11
 Filterentwurf IIR-Filter Beispiele für die verschiedenen Filtertypen FIR-Filter Entwurf mit inv. Fouriertransformation und Fensterfunktion Filter mit Tschebyscheff-Verhalten Vorgehensweise bei Matlab /
Filterentwurf IIR-Filter Beispiele für die verschiedenen Filtertypen FIR-Filter Entwurf mit inv. Fouriertransformation und Fensterfunktion Filter mit Tschebyscheff-Verhalten Vorgehensweise bei Matlab /
Beate Meffert, Olaf Hochmuth: Werkzeuge der Signalverarbeitung, Pearson 2004
 4 Signalverarbeitung 4.1! Grundbegriffe! 4.2! Frequenzspektren, Fourier-Transformation! 4.3! Abtasttheorem: Eine zweite Sicht Weiterführende Literatur (z.b.):!! Beate Meffert, Olaf Hochmuth: Werkzeuge
4 Signalverarbeitung 4.1! Grundbegriffe! 4.2! Frequenzspektren, Fourier-Transformation! 4.3! Abtasttheorem: Eine zweite Sicht Weiterführende Literatur (z.b.):!! Beate Meffert, Olaf Hochmuth: Werkzeuge
Übung 3: Fouriertransformation
 ZHAW, SiSy HS202, Rumc, Übung 3: Fouriertransformation Aufgabe Fouriertransformation Dirac-Impuls. a) Bestimmen Sie die Fouriertransformierte S(f) des Dirac-Impulses s(t) = δ(t) und interpretieren Sie
ZHAW, SiSy HS202, Rumc, Übung 3: Fouriertransformation Aufgabe Fouriertransformation Dirac-Impuls. a) Bestimmen Sie die Fouriertransformierte S(f) des Dirac-Impulses s(t) = δ(t) und interpretieren Sie
Aufgabe 1 (20 Punkte)
") Augabe 1 (20 Punkte) Es wird ein Sprachsignal x(t) betrachtet, das über eine ISDN-Teleonleitung übertragen wird. Das Betragsspektrum X() des analogen Signals kann dem nachstehenden Diagramm entnommen werden.
Augabe 1 (20 Punkte) Es wird ein Sprachsignal x(t) betrachtet, das über eine ISDN-Teleonleitung übertragen wird. Das Betragsspektrum X() des analogen Signals kann dem nachstehenden Diagramm entnommen werden.