Geodätische Woche 2014 Session 6 Theoretische Geodäsie
|
|
|
- Oskar Reuter
- vor 6 Jahren
- Abrufe
Transkript
 &")
")




1 Enrico Mai (IfE/LUH) & Robin Geyer (ZIH/TUD) Numerische Integration mittels Lie Reihen unter Verwendung von Parallelem Rechnen Geodätische Woche 2014 Session 6 Theoretische Geodäsie Berlin,
2 MOTIVATION Lösung von Bewegungsproblemen, z.b. - in der Satellitengeodäsie (Satellitenbahn-Berechnung) - analytische Bahntheorien (Stumpff, Kaula, Cui/Schneider, ) - numerische Integration (UTOPIA/MSODP, BERNESE, ) - semi-analytische Bahntheorien (Dallas,, in Arbeit ) - in der Himmelsmechanik (Ephemeriden-Rechnung) - analytische (Planeten-)Bahntheorien (VSOP/TOP, ) - numerische Integration (DE, INPOP, EPM,, in Arbeit ) - symplektische Integratoren (SWIFT, MERCURY, ) - semi-analytische Bahntheorien (s.o.)
3 ALTERNATIVE INTEGRATIONSMETHODEN (BEISPIELE) basierend auf Lie-Reihen bzw. Lie-Algebra - semi-analytische Bahntheorie, d.h., numerische Integration unter Verwendung von Lie-Reihen - Hamilton-Funktion für relativistisches N-Körper Problem - Hill Variablen (als Beispiel für kanonischen Variablensatz) - symplektische Integratoren (höherer Ordnung) - gute Stabilitätseigenschaften - Koordinatenwahl zur Aufspaltung der Hamilton-Funktion - Potential für Verbesserungen: Korrektor, Kombinationen Softwarepakete für Langzeit-Integrationen: SWIFT, MERCURY

4 IDEALISIERTE BEWEGUNGSPROBLEME linearer harmonischer Oszillator gedämpfter linearer Oszillator Standard-Lösung bzw. als Sonderfall bekannte exakte Lösung äquivalente Lösung, z.b. über Laplace-Transformation
5 IDEALISIERTE BEWEGUNGSPROBLEME generalisierter (Duffing) Oszillator Eigenfrequenz Dämpfung Nicht-Linearität Äußere Anregung











6 IDEALISIERTE BEWEGUNGSPROBLEME Duffing Oszillator (ohne Dämpfung, ohne äußere Anregung) Auswahl von Lösungstechniken: - modifizierte Methode nach Cui - Eliminationsmethode - Propagator - Renormierung (wg. Poisson-Termen) - Laplace-Transformation - Neumann-Reihe -

7 DEFINITION DER POISSON-KLAMMER Poisson-Klammer vs Anmerkung:
 Anwendung der")

8 BEWEGUNGSGLEICHUNGEN MITTELS POISSON-KLAMMERN totales Differential einer beliebigen Funktion (Phasenraum: n = 3) Anwendung der kanonischen / Hamilton schen Gleichungen Anmerkung: Cui s Vorzeichenkonvention F = -H mit H = T + V Spezialfall voll-symmetrisch so dass mit

9 LIE-ABLEITUNG <> POISSON-KLAMMERN Annahme zweier beliebiger Funktionen und Definition der Lie-Ableitung der Funktion f
10 LIE-REIHEN Kommutationsgesetz wichtig für Lie-Transformation Anmerkung: Parameter s (z.b. als Zeit t ) Anmerkung ist unabhängig von q und p Beispiel für die Definition einer Lie-Reihe Ersetzung der allgemeinen Funktion durch die Parameter selbst
 Definition des Lie-Operators falls mehr-dimensional")
11 LIE-OPERATOR Zusammenhang mit Darstellung von Hanslmeier & Dvorak (1984) Definition des Lie-Operators falls mehr-dimensional Zustandsvektor




12 LIE-REIHEN : ANWENDUNG ZUR NUMERISCHEN INTEGRATION 1-dimensional




13 LIE-REIHEN : ANWENDUNG ZUR NUMERISCHEN INTEGRATION Duffing oscillator

14 LIE-REIHEN : ANWENDUNG ZUR NUMERISCHEN INTEGRATION Duffing oscillator







15 LIE-REIHEN : ANWENDUNG ZUR NUMERISCHEN INTEGRATION gedämpfter linearer Oszillator / erinnere: exakte Lösung ist bekannt Term-weise äquivalent zu






16 LIE-REIHEN : ANWENDUNG ZUR NUMERISCHEN INTEGRATION mehr-dimensional für x k = f k bzw. g k, und h = x bzw. p gilt:

17 ANWENDUNG: KEPLER-PROBLEM (IDEALISIERTES 2-KÖRPER-PR.) unter Verwendung von kartesischen Koordinaten

18 ANWENDUNG: KEPLER-PROBLEM (IDEALISIERTES 2-KÖRPER-PR.) unter Verwendung von Hill-Variablen

19 ANWENDUNG: KEPLER-PROBLEM (IDEALISIERTES 2-KÖRPER-PR.)

20 ANWENDUNG: KEPLER-PROBLEM (IDEALISIERTES 2-KÖRPER-PR.)
21 ANWENDUNG: ALLGEMEINERE KEPLER-PROBLEM PROBLEMSTELLUNGEN (IDEALISIERTES 2-KÖRPER-PR.) Möglichkeiten zur Rechenkontrolle - Vergleich mit analytischen Lösungen, z.b. Stumpff-Lösung existieren nur für Spezialfälle - Testen von Integralen der Bewegung - Drehimpuls-Vektor - Energie - Laplace- (Runge-Lenz / Exzentrizitäts-) Vektor - sonstige: -- Testen kinematischer Beziehungen - sonstige: -- Vergleich Vorwärts- <> Rückwärts-Rechnung - sonstige: -- Vergleich mit unabhängigen Berechnungen Dritter
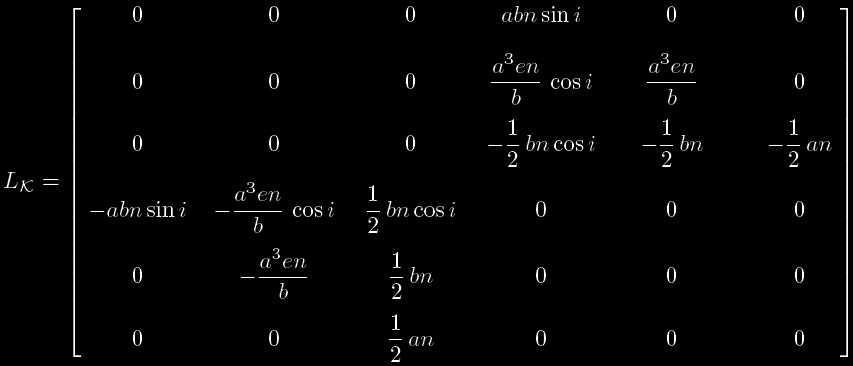
22 ANWENDUNG: KLASSISCHES HAUPTPROBLEM (NUR J 2 = -c 20 ) Hill-Variablen Anmerkung: Kepler-Variablen denkbar ungeeignet, selbst bei Anmerkung: Beschränkung auf Terme bis zur Ordung O(e 2 )!
23 ANWENDUNG: KLASSISCHES HAUPTPROBLEM (NUR J 2 = -c 20 ) Modifizierte kanonische Kugelkoordinaten Elliptische Parametrisierung (cf. Schneider HM III)

24 BEISPIEL: 4x4 IM ERWEITERTEN PHASENRAUM

25 BEISPIEL: 4x4 IM ERWEITERTEN PHASENRAUM
26 BEISPIEL: 4x4 IM ERWEITERTEN PHASENRAUM mit semi-analytische Bahntheorie
27 NUMERISCHE ERGEBNISSE: KEPLER-PROBLEM Bewegungsgleichung der Relativbewegung Kraftmodell-Parameter Startwerte


28 NUMERISCHE ERGEBNISSE: KEPLER-PROBLEM Einzelschritt-Genauigkeit lokal global

29 NUMERISCHE ERGEBNISSE: KEPLER-PROBLEM

30 NUMERISCHE ERGEBNISSE: KEPLER-PROBLEM erinnere alternative Kontrollmöglichkeiten - kinematische Beziehungen - Bewegungsintegrale, z.b.

31 NUMERISCHE ERGEBNISSE: KLASSISCHES HAUPTPROBLEM (c 20 ) Bewegungsgleichung der Relativbewegung Kraftmodell-Parameter Bewegungsintegrale
 Einzelschritt Bahnbogen")
32 NUMERISCHE ERGEBNISSE: KLASSISCHES HAUPTPROBLEM (c 20 ) Einzelschritt Bahnbogen (Länge = 1Tag)
 Bahnbogen (Länge =")
33 NUMERISCHE ERGEBNISSE: KLASSISCHES HAUPTPROBLEM (c 20 ) Bahnbogen (Länge = 1Tag)





34 NUMERISCHE ERGEBNISSE: KLASSISCHES HAUPTPROBLEM (c 20 )

35 NUMERISCHE ERGEBNISSE: 4x4-PROBLEM (n max = m max = 4) Bewegungsgleichung Kraftmodell-Parameter Startwerte Bewegungsintegral

")

36 NUMERISCHE ERGEBNISSE: 4x4-PROBLEM (n max = m max = 4) Lie-Reihe: Kompromiss zwischen Entwicklungsgrad und Schrittweite


37 PARALLEL-PROGRAMMIERUNG (z.b. mittels OpenMP)
38




 - in der")
 - analytische")

39 MOTIVATION Lösung von Bewegungsproblemen, z.b. - in der Satellitengeodäsie (Satellitenbahn-Berechnung) - analytische Bahntheorien (Stumpff, Kaula, Cui/Schneider, ) - numerische Integration (UTOPIA/MSODP, BERNESE, ) - semi-analytische Bahntheorien (Dallas,, in Arbeit ) - in der Himmelsmechanik (Ephemeriden-Rechnung) - analytische (Planeten-)Bahntheorien (VSOP/TOP, ) - numerische Integration (DE, INPOP, EPM,, in Arbeit ) - symplektische Integratoren (SWIFT, MERCURY, ) - semi-analytische Bahntheorien (s.o.)





40 BEISPIEL: EPHEMERIDENRECHNUNG (ANALYTISCH vs. NUMERISCH) analytisch IMCCE (France) INPOPxxx numerisch JPL (USA) DExxx IPA (Russia) EPMxxxx
41 ORDNUNG EINER (SEMI-)ANALYTISCHEN BAHNTHEORIE Kleinheitsparameter e - Satellitenbahn-Integration (z.b. klassisches Hauptproblem ) e = c 20 = O(10-03 ) Ordnung/Fehler einer Theorie - 0 th Terme berücksichtigt bis O(e 0 ) Fehler O(10-03 ) - 1 st Terme berücksichtigt bis O(e 1 ) Fehler O(10-06 ) - 2 nd Terme berücksichtigt bis O(e 2 ) Fehler O(10-09 ) - 3 rd Terme berücksichtigt bis O(e 3 ) Fehler O(10-12 ) GPS: a = km mm
42 HAMILTONISIERUNG gedämpfter Duffing Oszillator) Ansatz






43 GENERALISIERUNG (1-DIMENSIONAL <> MEHR-DIMENSIONAL) Mehrkörperproblem mehr-dimensional 1-dimensional Einkörperproblem Substitution kanonische Gleichungen
44 BAHNVARIABLEN (BEISPIELE) nicht-kanonisch - Kepler-Elemente - äquinoktische Elemente kanonisch - kartesische Koordinaten - kanonische / modifizierte kanonische Kugelkoordinaten - Hill-Variablen - Delaunay-Variablen - Poincaré-Variablen /
45 MATRIX DER LAGRANGE-KLAMMERN Langrange-Klammer Kepler-Elemente




46 MATRIX DER LAGRANGE-KLAMMERN Langrange-Klammer kanonische Kepler-Elemente Hill-Variablen Kugelkoordinaten Kanonizität
 Abspaltung der")
 9 Anmerkung: Beschränkung auf")
47 ANWENDUNG: KLASSISCHES HAUPTPROBLEM (NUR J 2 = -c 20 ) Abspaltung der geschlossenen Kepler-Lösung (da bereits bekannt) 9 Anmerkung: Beschränkung auf Terme bis O(c 20 )


48 PHASENRAUM: REDUZIERT vs ERWEITERT reduzierter Phasenraum vs erweiterter Phasenraum

49 NUMERISCHE ERGEBNISSE: 4x4-PROBLEM (n max = m max = 4) Notwendigkeit konsistenter Kraftmodell-Parameter, z.b.



50 NUMERISCHE ERGEBNISSE: 4x4-PROBLEM (n max = m max = 4) Notwendigkeit einer geeigneten Integrationsschrittweite(-nsteuerung) BZ BZ BZ UT UT UT h UT = 90, 96, 100, 108, 120 seconds

51 NUMERISCHE ERGEBNISSE: KEPLER-PROBLEM Bewegungsgleichung der Relativbewegung Kraftmodell-Parameter Startwerte


52 NUMERISCHE ERGEBNISSE: KEPLER-PROBLEM globaler Fehler in mm vs. Bahnbogenlänge in Tagen
Einführung in die Himmelsmechanik und Ephemeridenrechnung
 Einführung in die Himmelsmechanik und Ephemeridenrechnung von Dr. Andreas Guthmann Universität Kaiserslautern Wissenschaftsverlag Mannheim Leipzig Wien Zürich Inhalt Vorrede 1 Inhalt 7 Notation 14 Kapitel
Einführung in die Himmelsmechanik und Ephemeridenrechnung von Dr. Andreas Guthmann Universität Kaiserslautern Wissenschaftsverlag Mannheim Leipzig Wien Zürich Inhalt Vorrede 1 Inhalt 7 Notation 14 Kapitel
11. Vorlesung Wintersemester
 11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
7 Die Hamilton-Jacobi-Theorie
 7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
Definition: Variablentransformation d. Form (2) heisst "kanonisch", wenn sie d. Form der kanonischen Bewegungsgleichungen erhält, d.h.
 heisst kanonisch, wenn sie d. Form der kanonischen Bewegungsgleichungen erhält, d.h.") Zusammenfassung: kanonische Transformationen Definition: Variablentransformation d. Form (2) heisst "kanonisch", wenn sie d. Form der kanonischen Bewegungsgleichungen erhält, d.h., wenn ein existiert,
Zusammenfassung: kanonische Transformationen Definition: Variablentransformation d. Form (2) heisst "kanonisch", wenn sie d. Form der kanonischen Bewegungsgleichungen erhält, d.h., wenn ein existiert,
48 Symplektische Geometrie und Klassische Mechanik
 48 Symplektische Geometrie und Klassische Mechanik Zusammenfassung Zum Schluss der Vorlesung gehen wir noch auf eine geometrische Struktur ein, die wie die euklidische oder die Minkowski-Struktur im Rahmen
48 Symplektische Geometrie und Klassische Mechanik Zusammenfassung Zum Schluss der Vorlesung gehen wir noch auf eine geometrische Struktur ein, die wie die euklidische oder die Minkowski-Struktur im Rahmen
Blatt 10. Hamilton-Formalismus- Lösungsvorschlag
 Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik T) im SoSe 20 Blatt 0. Hamilton-Formalismus- Lösungsvorschlag Aufgabe 0.. Hamilton-Formalismus
Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik T) im SoSe 20 Blatt 0. Hamilton-Formalismus- Lösungsvorschlag Aufgabe 0.. Hamilton-Formalismus
Übungen Theoretische Physik I (Mechanik) Blatt 8 (Austeilung am: , Abgabe am )
 Blatt 8 (Austeilung am: , Abgabe am )") Übungen Theoretische Physik I (Mechanik) Blatt 8 (Austeilung am: 14.09.11, Abgabe am 1.09.11) Hinweis: Kommentare zu den Aufgaben sollen die Lösungen illustrieren und ein besseres Verständnis ermöglichen.
Übungen Theoretische Physik I (Mechanik) Blatt 8 (Austeilung am: 14.09.11, Abgabe am 1.09.11) Hinweis: Kommentare zu den Aufgaben sollen die Lösungen illustrieren und ein besseres Verständnis ermöglichen.
10. und 11. Vorlesung Sommersemester
 10. und 11. Vorlesung Sommersemester 1 Die Legendre-Transformation 1.1 Noch einmal mit mehr Details Diese Ableitung wirkt einfach, ist aber in dieser Form sicher nicht so leicht verständlich. Deswegen
10. und 11. Vorlesung Sommersemester 1 Die Legendre-Transformation 1.1 Noch einmal mit mehr Details Diese Ableitung wirkt einfach, ist aber in dieser Form sicher nicht so leicht verständlich. Deswegen
Theoretische Physik I
 Peter Reineker, Michael Schulz und Beatrix M. Schulz Theoretische Physik I Mechanik mit Aufgaben in Maple WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA VII Inhaltsverzeichnis Vorwort XV 1 Einleitung 1 1.1
Peter Reineker, Michael Schulz und Beatrix M. Schulz Theoretische Physik I Mechanik mit Aufgaben in Maple WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA VII Inhaltsverzeichnis Vorwort XV 1 Einleitung 1 1.1
Name: Gruppe: Matrikel-Nummer:
 Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 1/13/14) Dozent: J. von Delft Übungen: B. Kubala Klausur zur Vorlesung T1: Theoretische Mechanik, SoSe 008 (3. Juli 007) Bearbeitungszeit:
Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 1/13/14) Dozent: J. von Delft Übungen: B. Kubala Klausur zur Vorlesung T1: Theoretische Mechanik, SoSe 008 (3. Juli 007) Bearbeitungszeit:
Höhere Mathematik für Naturwissenschaftler und Ingenieure
 Günter Bärwolff Höhere Mathematik für Naturwissenschaftler und Ingenieure unter Mitarbeit von Gottfried Seifert ELSEVIER SPEKTRUM AKADEMISCHER VERLAG Spekt rum K-/1. AKADEMISCHER VERLAG AKADEMISC Inhaltsverzeichnis
Günter Bärwolff Höhere Mathematik für Naturwissenschaftler und Ingenieure unter Mitarbeit von Gottfried Seifert ELSEVIER SPEKTRUM AKADEMISCHER VERLAG Spekt rum K-/1. AKADEMISCHER VERLAG AKADEMISC Inhaltsverzeichnis
Vektoren - Basiswechsel
 Vektoren - Basiswechsel Grundprinzip Für rein geometrische Anwendungen verwendet man üblicherweise die Standardbasis. Damit ergibt sich in den Zahlenangaben der Koordinaten kein Unterschied zu einem Bezug
Vektoren - Basiswechsel Grundprinzip Für rein geometrische Anwendungen verwendet man üblicherweise die Standardbasis. Damit ergibt sich in den Zahlenangaben der Koordinaten kein Unterschied zu einem Bezug
Übungen zu Theoretische Physik I - Mechanik im Sommersemester 2013 Blatt 7 vom Abgabe:
 Übungen zu Theoretische Physik I - Mechanik im Sommersemester 03 Blatt 7 vom 0.06.3 Abgabe: 7.06.3 Aufgabe 9 3 Punkte Keplers 3. Gesetz Das 3. Keplersche Gesetz für die Planetenbewegung besagt, dass das
Übungen zu Theoretische Physik I - Mechanik im Sommersemester 03 Blatt 7 vom 0.06.3 Abgabe: 7.06.3 Aufgabe 9 3 Punkte Keplers 3. Gesetz Das 3. Keplersche Gesetz für die Planetenbewegung besagt, dass das
Name: Gruppe: Matrikel-Nummer:
 Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 12/13/14) Dozent: J. von Delft Übungen: B. Kubala Nachklausur zur Vorlesung T1: Theoretische Mechanik, SoSe 2008 (1. Oktober
Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 12/13/14) Dozent: J. von Delft Übungen: B. Kubala Nachklausur zur Vorlesung T1: Theoretische Mechanik, SoSe 2008 (1. Oktober
Grundlagen der Astronomie und Astrophysik. Andre Knecht. [HIMMELSMECHANIK] 3 Erhaltungssätze und die Herleitung der drei Kepler-Gesetze
![Grundlagen der Astronomie und Astrophysik. Andre Knecht. [HIMMELSMECHANIK] 3 Erhaltungssätze und die Herleitung der drei Kepler-Gesetze](/thumbs/49/25161834.jpg "Grundlagen der Astronomie und Astrophysik. Andre Knecht. [HIMMELSMECHANIK] 3 Erhaltungssätze und die Herleitung der drei Kepler-Gesetze") 2009 Grundlagen der Astronomie und Astrophysik Andre Knecht [HIMMELSMECHANIK] 3 Erhaltungssätze und die Herleitung der drei Kepler-Gesetze 2-Körperproblem-Gravitationsgesetz 3 Newton schen Axiome Trägheitsgesetz:
2009 Grundlagen der Astronomie und Astrophysik Andre Knecht [HIMMELSMECHANIK] 3 Erhaltungssätze und die Herleitung der drei Kepler-Gesetze 2-Körperproblem-Gravitationsgesetz 3 Newton schen Axiome Trägheitsgesetz:
1 Vektoralgebra (3D euklidischer Raum R 3 )
") Institut für Physik der Martin-Luther-Universität Halle-Wittenberg WS 202/203 Vorlesung Elektrodynamik LAG PD Dr. Angelika Chassé) Vektoralgebra 3D euklidischer Raum R 3 ). Grundbegriffe = Vektordefinition
Institut für Physik der Martin-Luther-Universität Halle-Wittenberg WS 202/203 Vorlesung Elektrodynamik LAG PD Dr. Angelika Chassé) Vektoralgebra 3D euklidischer Raum R 3 ). Grundbegriffe = Vektordefinition
Einführung in die Grundlagen der Theoretischen Physik
 Günther Ludwig Einführung in die Grundlagen der Theoretischen Physik Band 1: Raum, Zeit, Mechanik 2., durchgesehene und erweiterte Auflage Vieweg Inhalt Zur Einführung 1 /. Was theoretische Physik nicht
Günther Ludwig Einführung in die Grundlagen der Theoretischen Physik Band 1: Raum, Zeit, Mechanik 2., durchgesehene und erweiterte Auflage Vieweg Inhalt Zur Einführung 1 /. Was theoretische Physik nicht
Motivation. Motivation 2
 Grenzzyklen 1 Motivation Grenzzyklen modellieren von selbst oszillierende Systeme Stabile Grenzzyklen kleine Abweichungen in den Anfangsbedingungen gehen in Grenzzyklus über Beispiele: Van-der-Pol Schwingkreis
Grenzzyklen 1 Motivation Grenzzyklen modellieren von selbst oszillierende Systeme Stabile Grenzzyklen kleine Abweichungen in den Anfangsbedingungen gehen in Grenzzyklus über Beispiele: Van-der-Pol Schwingkreis
Allgemeine Mechanik Musterlösung 11.
 Allgemeine Mechanik Musterlösung 11. HS 2014 Prof. Thomas Gehrmann Übung 1. Poisson-Klammern 1 Zeigen Sie mithilfe der Poisson-Klammern, dass folgendes gilt: a Für das Potential V ( r = α r 1+ε ist der
Allgemeine Mechanik Musterlösung 11. HS 2014 Prof. Thomas Gehrmann Übung 1. Poisson-Klammern 1 Zeigen Sie mithilfe der Poisson-Klammern, dass folgendes gilt: a Für das Potential V ( r = α r 1+ε ist der
Praktikumssemesterarbeit für Numerik Aufgabe 1 HU-Berlin, Sommersemester 2005
 Praktikumssemesterarbeit für Numerik Aufgabe HU-Berlin, Sommersemester 2005 Mario Krell Volker Grabsch 24. Juli 2005 Inhaltsverzeichnis Herleitung aus der Physik. Voraussetzungen und Annahmen Allgemein
Praktikumssemesterarbeit für Numerik Aufgabe HU-Berlin, Sommersemester 2005 Mario Krell Volker Grabsch 24. Juli 2005 Inhaltsverzeichnis Herleitung aus der Physik. Voraussetzungen und Annahmen Allgemein
Inhaltsverzeichnis. Vorwort Kapitel 1 Einführung, I: Algebra Kapitel 2 Einführung, II: Gleichungen... 57
 Vorwort... 13 Vorwort zur 3. deutschen Auflage... 17 Kapitel 1 Einführung, I: Algebra... 19 1.1 Die reellen Zahlen... 20 1.2 Ganzzahlige Potenzen... 23 1.3 Regeln der Algebra... 29 1.4 Brüche... 34 1.5
Vorwort... 13 Vorwort zur 3. deutschen Auflage... 17 Kapitel 1 Einführung, I: Algebra... 19 1.1 Die reellen Zahlen... 20 1.2 Ganzzahlige Potenzen... 23 1.3 Regeln der Algebra... 29 1.4 Brüche... 34 1.5
D-MATH Numerische Methoden FS 2016 Dr. Vasile Gradinaru Alexander Dabrowski. Serie 9
 D-MATH Numerische Methoden FS 2016 Dr. Vasile Gradinaru Alexander Dabrowski Serie 9 Best Before: 24.5/25.5, in den Übungsgruppen (2 wochen) Koordinatoren: Alexander Dabrowski, HG G 52.1, alexander.dabrowski@sam.math.ethz.ch
D-MATH Numerische Methoden FS 2016 Dr. Vasile Gradinaru Alexander Dabrowski Serie 9 Best Before: 24.5/25.5, in den Übungsgruppen (2 wochen) Koordinatoren: Alexander Dabrowski, HG G 52.1, alexander.dabrowski@sam.math.ethz.ch
Hamilton-Mechanik. Inhaltsverzeichnis. 1 Einleitung. 2 Verallgemeinerter oder kanonischer Impuls. Simon Filser
 Hamilton-Mechanik Simon Filser 4.9.09 Inhaltsverzeichnis 1 Einleitung 1 Verallgemeinerter oder kanonischer Impuls 1 3 Hamiltonfunktion und kanonische Gleichungen 4 Die Hamiltonfunktion als Energie und
Hamilton-Mechanik Simon Filser 4.9.09 Inhaltsverzeichnis 1 Einleitung 1 Verallgemeinerter oder kanonischer Impuls 1 3 Hamiltonfunktion und kanonische Gleichungen 4 Die Hamiltonfunktion als Energie und
Großes Lehrbuch der Mathematik für Ökonomen
 Großes Lehrbuch der Mathematik für Ökonomen Von Professor Dr. Karl Bosch o. Professor für angewandte Mathematik und Statistik an der Universität Stuttgart-Hohenheim und Professor Dr. Uwe Jensen R. Oldenbourg
Großes Lehrbuch der Mathematik für Ökonomen Von Professor Dr. Karl Bosch o. Professor für angewandte Mathematik und Statistik an der Universität Stuttgart-Hohenheim und Professor Dr. Uwe Jensen R. Oldenbourg
2. Lagrange-Gleichungen
 2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
Übungen zu Meteorologische Modellierung Teil 'Grundlagen der Numerik'
 Übungen zu Meteorologische Modellierung Teil 'Grundlagen der Numerik' 1. Diskretisierung in der Zeit: Die Evolutionsgleichung Kurzzusammenfassung Zur Erprobung der Verfahren zur zeitlichen Diskretisierung
Übungen zu Meteorologische Modellierung Teil 'Grundlagen der Numerik' 1. Diskretisierung in der Zeit: Die Evolutionsgleichung Kurzzusammenfassung Zur Erprobung der Verfahren zur zeitlichen Diskretisierung
Ingenieurmathematik mit MATLAB
 Dieter Schott Ingenieurmathematik mit MATLAB Algebra und Analysis für Ingenieure Mit 179 Abbildungen, zahlreichen Beispielen, Übungsaufgaben und Lernkontrollen Fachbuchverlag Leipzig im Carl Hanser Verlag
Dieter Schott Ingenieurmathematik mit MATLAB Algebra und Analysis für Ingenieure Mit 179 Abbildungen, zahlreichen Beispielen, Übungsaufgaben und Lernkontrollen Fachbuchverlag Leipzig im Carl Hanser Verlag
Musterlösungen. Theoretische Physik I: Klassische Mechanik
 Blatt 1 4.01.013 Musterlösungen Theoretische Physik I: Klassische Mechanik Prof. Dr. G. Alber MSc Nenad Balanesković Hamilton-Funktion 1. Betrachten Sie zwei Massenpunktem 1 undm die sich gemäß dem Newtonschen
Blatt 1 4.01.013 Musterlösungen Theoretische Physik I: Klassische Mechanik Prof. Dr. G. Alber MSc Nenad Balanesković Hamilton-Funktion 1. Betrachten Sie zwei Massenpunktem 1 undm die sich gemäß dem Newtonschen
Theoretische Physik 1 Mechanik
 Technische Universität München Fakultät für Physik Ferienkurs Theoretische Physik 1 Mechanik Skript zu Vorlesung 2: konservative Kräfte, Vielteilchensysteme und ausgedehnte Körper gehalten von: Markus
Technische Universität München Fakultät für Physik Ferienkurs Theoretische Physik 1 Mechanik Skript zu Vorlesung 2: konservative Kräfte, Vielteilchensysteme und ausgedehnte Körper gehalten von: Markus
Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente
 . Session 6: Theoretische Geodäsie Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente 1 Jessica Franken Institut für Geodäsie und Geoinformation Professur für Theoretische
. Session 6: Theoretische Geodäsie Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente 1 Jessica Franken Institut für Geodäsie und Geoinformation Professur für Theoretische
PP Physikalisches Pendel
 PP Physikalisches Pendel Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Ungedämpftes physikalisches Pendel.......... 2 2.2 Dämpfung
PP Physikalisches Pendel Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Ungedämpftes physikalisches Pendel.......... 2 2.2 Dämpfung
Analytische Geometrie - Schnittwinkel. u 1, u 2 Richtungsvektoren der Geraden
 Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung. 4. Dämpfungsmodelle. Elastodynamik 1 3.
 4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung 4. Dämpfungsmodelle 3.4-1 4.1 Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische
4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung 4. Dämpfungsmodelle 3.4-1 4.1 Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische
Gewöhnliche Differentialgleichungen am Beispiel des harmonischen Oszillators
 Gewöhnliche Differentialgleichungen am Beispiel des harmonischen Oszillators Horst Laschinsky 12. Oktober 1999 Inhaltsverzeichnis 1 Gewöhnliche lineare homogene Differentialgleichungen 2. Ordnung mit konstanten
Gewöhnliche Differentialgleichungen am Beispiel des harmonischen Oszillators Horst Laschinsky 12. Oktober 1999 Inhaltsverzeichnis 1 Gewöhnliche lineare homogene Differentialgleichungen 2. Ordnung mit konstanten
Eine lineare Abbildung ist bijektiv, d.h. ihre Matrix ist invertierbar, falls und nur falls
 Kriterien für Invertierbarkeit einer Matrix Eine lineare Abbildung ist bijektiv, d.h. ihre Matrix ist invertierbar, falls und nur falls (i) für jede Basis, die Bildvektoren auch eine Basis, bilden; (intuitiv
Kriterien für Invertierbarkeit einer Matrix Eine lineare Abbildung ist bijektiv, d.h. ihre Matrix ist invertierbar, falls und nur falls (i) für jede Basis, die Bildvektoren auch eine Basis, bilden; (intuitiv
Mathematik für Wirtschaftswissenschaftler
 Knut Sydsaeter Peter HammondJ Mathematik für Wirtschaftswissenschaftler Basiswissen mit Praxisbezug 2., aktualisierte Auflage Inhaltsverzeichnis Vorwort 13 Vorwort zur zweiten Auflage 19 Kapitel 1 Einführung,
Knut Sydsaeter Peter HammondJ Mathematik für Wirtschaftswissenschaftler Basiswissen mit Praxisbezug 2., aktualisierte Auflage Inhaltsverzeichnis Vorwort 13 Vorwort zur zweiten Auflage 19 Kapitel 1 Einführung,
Inhaltsverzeichnis Einleitung Mathematische Grundlagen
 Inhaltsverzeichnis 1 Einleitung 1.1 Vorgehensweise bei der FEM... 3 1.2 Verschiedene Elementtypen... 5 1.3 Beispiele zur Finite-Elemente-Methode... 10 1.3.1 Beispiel zu nichtlinearen Problemen... 10 1.3.2
Inhaltsverzeichnis 1 Einleitung 1.1 Vorgehensweise bei der FEM... 3 1.2 Verschiedene Elementtypen... 5 1.3 Beispiele zur Finite-Elemente-Methode... 10 1.3.1 Beispiel zu nichtlinearen Problemen... 10 1.3.2
Optimieren unter Nebenbedingungen
 Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
Mathematik anschaulich dargestellt
 Peter Dörsam Mathematik anschaulich dargestellt für Studierende der Wirtschaftswissenschaften 15. überarbeitete Auflage mit zahlreichen Abbildungen PD-Verlag Heidenau Inhaltsverzeichnis 1 Lineare Algebra
Peter Dörsam Mathematik anschaulich dargestellt für Studierende der Wirtschaftswissenschaften 15. überarbeitete Auflage mit zahlreichen Abbildungen PD-Verlag Heidenau Inhaltsverzeichnis 1 Lineare Algebra
1.4 Gradient, Divergenz und Rotation
 .4 Gradient, Divergenz und Rotation 5.4 Gradient, Divergenz und Rotation Die Begriffe Gradient, Divergenz und Rotation erfordern die partiellen Ableitung aus Abschnitt.. sowie das Konzept des Differentialoperators.
.4 Gradient, Divergenz und Rotation 5.4 Gradient, Divergenz und Rotation Die Begriffe Gradient, Divergenz und Rotation erfordern die partiellen Ableitung aus Abschnitt.. sowie das Konzept des Differentialoperators.
Lineare Algebra für D-ITET, D-MATL, RW. Beispiellösung für Serie 10. Aufgabe ETH Zürich D-MATH. Herbstsemester Dr. V. Gradinaru D.
 Dr. V. Gradinaru D. Devaud Herbstsemester 5 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie Aufgabe..a Bezüglich des euklidischen Skalarprodukts in R ist die Orthogonalprojektion
Dr. V. Gradinaru D. Devaud Herbstsemester 5 Lineare Algebra für D-ITET, D-MATL, RW ETH Zürich D-MATH Beispiellösung für Serie Aufgabe..a Bezüglich des euklidischen Skalarprodukts in R ist die Orthogonalprojektion
Iterative Methods for Improving Mesh Parameterizations
 Iterative Methods for Improving Mesh Parameterizations Autoren: Shen Dong & Michael Garland, SMI 07 Nicola Sheldrick Seminar Computergrafik April 6, 2010 Nicola Sheldrick (Seminar Computergrafik)Iterative
Iterative Methods for Improving Mesh Parameterizations Autoren: Shen Dong & Michael Garland, SMI 07 Nicola Sheldrick Seminar Computergrafik April 6, 2010 Nicola Sheldrick (Seminar Computergrafik)Iterative
Eine einfache Methode zur Bestimmung des Bahnradius eines Planetoiden
 Eine einfache Methode zur Bestimmung des Bahnradius eines Planetoiden Von Eckhardt Schön Erfurt Mit 1 Abbildung Die Bewegung der Planeten und Kleinkörper des Sonnensystems verläuft scheinbar zweidimensional
Eine einfache Methode zur Bestimmung des Bahnradius eines Planetoiden Von Eckhardt Schön Erfurt Mit 1 Abbildung Die Bewegung der Planeten und Kleinkörper des Sonnensystems verläuft scheinbar zweidimensional
Moderne Portfoliotheorie
 ortfoliooptimierung nach Markowitz Moderne ortfoliotheorie Carlos Nasher Universität Hamburg Hamburg, 12. Mai 2009 ortfoliooptimierung nach Markowitz Moderne ortfoliotheorie 1. Theoretische Grundlagen
ortfoliooptimierung nach Markowitz Moderne ortfoliotheorie Carlos Nasher Universität Hamburg Hamburg, 12. Mai 2009 ortfoliooptimierung nach Markowitz Moderne ortfoliotheorie 1. Theoretische Grundlagen
Optimierung. Optimierung. Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren. 2013 Thomas Brox, Fabian Kuhn
 Optimierung Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren 1 Minimierung ohne Nebenbedingung Ein Optimierungsproblem besteht aus einer zulässigen Menge und einer Zielfunktion Minimum
Optimierung Vorlesung 2 Optimierung ohne Nebenbedingungen Gradientenverfahren 1 Minimierung ohne Nebenbedingung Ein Optimierungsproblem besteht aus einer zulässigen Menge und einer Zielfunktion Minimum
Outline. 1 Vektoren im Raum. 2 Komponenten und Koordinaten. 3 Skalarprodukt. 4 Vektorprodukt. 5 Analytische Geometrie. 6 Lineare Räume, Gruppentheorie
 Outline 1 Vektoren im Raum 2 Komponenten und Koordinaten 3 Skalarprodukt 4 Vektorprodukt 5 Analytische Geometrie 6 Lineare Räume, Gruppentheorie Roman Wienands (Universität zu Köln) Mathematik II für Studierende
Outline 1 Vektoren im Raum 2 Komponenten und Koordinaten 3 Skalarprodukt 4 Vektorprodukt 5 Analytische Geometrie 6 Lineare Räume, Gruppentheorie Roman Wienands (Universität zu Köln) Mathematik II für Studierende
Einführung in die höhere Mathematik 2
 Herbert Dallmann und Karl-Heinz Elster Einführung in die höhere Mathematik 2 Lehrbuch für Naturwissenschaftler und Ingenieure ab 1. Semester Mit 153 Bildern Friedr. Vieweg & Sohn Braunschweig /Wiesbaden
Herbert Dallmann und Karl-Heinz Elster Einführung in die höhere Mathematik 2 Lehrbuch für Naturwissenschaftler und Ingenieure ab 1. Semester Mit 153 Bildern Friedr. Vieweg & Sohn Braunschweig /Wiesbaden
3.6 Eigenwerte und Eigenvektoren
 3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
Iterative Verfahren, Splittingmethoden
 Iterative Verfahren, Splittingmethoden Theodor Müller 19. April 2005 Sei ein lineares Gleichungssystem der Form Ax = b b C n, A C n n ( ) gegeben. Es sind direkte Verfahren bekannt, die ein solches Gleichungssystem
Iterative Verfahren, Splittingmethoden Theodor Müller 19. April 2005 Sei ein lineares Gleichungssystem der Form Ax = b b C n, A C n n ( ) gegeben. Es sind direkte Verfahren bekannt, die ein solches Gleichungssystem
Rechenverfahren und Auswertemodelle der Landesvermessung
 Bernhard Heck Rechenverfahren und Auswertemodelle der Landesvermessung Klassische und moderne Methoden Herbert Wichmann Verlag Karlsruhe IX INHALT Seite TEIL I: ALLGEMEINE GRUNDLAGEN 1 Einführung 1 1.1
Bernhard Heck Rechenverfahren und Auswertemodelle der Landesvermessung Klassische und moderne Methoden Herbert Wichmann Verlag Karlsruhe IX INHALT Seite TEIL I: ALLGEMEINE GRUNDLAGEN 1 Einführung 1 1.1
Hamilton-Formalismus
 KAPITEL IV Hamilton-Formalismus Einleitung! IV.1 Hamilton sche Bewegungsgleichungen IV.1.1 Kanonisch konjugierter Impuls Sei ein mechanisches System mit s Freiheitsgraden. Im Rahmen des in Kap. II eingeführten
KAPITEL IV Hamilton-Formalismus Einleitung! IV.1 Hamilton sche Bewegungsgleichungen IV.1.1 Kanonisch konjugierter Impuls Sei ein mechanisches System mit s Freiheitsgraden. Im Rahmen des in Kap. II eingeführten
Teil I.2 Lösen von Bestimmungsgleichungen
 Brückenkurs Mathematik Teil I.2 Lösen von Bestimmungsgleichungen Staatliche Studienakademie Leipzig Studienrichtung Informatik Dr. Susanne Schneider 12. September 2011 Bestimmungsgleichungen 1 Reelle Zahlen
Brückenkurs Mathematik Teil I.2 Lösen von Bestimmungsgleichungen Staatliche Studienakademie Leipzig Studienrichtung Informatik Dr. Susanne Schneider 12. September 2011 Bestimmungsgleichungen 1 Reelle Zahlen
Einführung in die Numerik strukturerhaltender Zeitintegratoren. Leonard Schlag 6. Dezember 2010
 Einführung in die Numerik strukturerhaltender Zeitintegratoren Leonard Schlag 6. Dezember 2010 1 Inhaltsverzeichnis 1 Einführung in die Numerik strukturerhaltender Zeitintegratoren 3 1.1 Häuge Problemstellung:
Einführung in die Numerik strukturerhaltender Zeitintegratoren Leonard Schlag 6. Dezember 2010 1 Inhaltsverzeichnis 1 Einführung in die Numerik strukturerhaltender Zeitintegratoren 3 1.1 Häuge Problemstellung:
FEM isoparametrisches Konzept
 FEM isoparametrisches Konzept /home/lehre/vl-mhs-/folien/vorlesung/5_fem_isopara/deckblatt.tex Seite von 25. p./25 Inhaltsverzeichnis. Interpolationsfunktion für die finiten Elemente 2. Finite-Element-Typen
FEM isoparametrisches Konzept /home/lehre/vl-mhs-/folien/vorlesung/5_fem_isopara/deckblatt.tex Seite von 25. p./25 Inhaltsverzeichnis. Interpolationsfunktion für die finiten Elemente 2. Finite-Element-Typen
Geometrie. 1 Vektorielle analytische Geometrie der Ebene, Kegelschnitte
 Geometrie Geometrie W. Kuhlisch Brückenkurs 206. Vektorrechnung und analytische Geometrie der Ebene, Kegelschnitte 2. Vektorrechnung und analytische Geometrie des Raumes, Anwendungen in der Geometrie,
Geometrie Geometrie W. Kuhlisch Brückenkurs 206. Vektorrechnung und analytische Geometrie der Ebene, Kegelschnitte 2. Vektorrechnung und analytische Geometrie des Raumes, Anwendungen in der Geometrie,
Allgemeines Gleichungssystem mit zwei Gleichungen und zwei Variablen. Der erste Index bezeichnet die Nummer der Zeile, der zweite die der Spalte.
 Lineare Gleichungssysteme. Einleitung Lineare Gleichungssysteme sind in der Theorie und in den Anwendungen ein wichtiges Thema. Theoretisch werden sie in der Linearen Algebra untersucht. Die Numerische
Lineare Gleichungssysteme. Einleitung Lineare Gleichungssysteme sind in der Theorie und in den Anwendungen ein wichtiges Thema. Theoretisch werden sie in der Linearen Algebra untersucht. Die Numerische
Zustandsraum: Historische Einordnung
 Zustandsraum: Historische Einordnung Die Grundlagen der Zustandsraummethoden wurden im Zeitraum 1955 1965 von Kalman und seinen Kollegen in dem Research Institute for Advanced Studies in Baltimore entwickelt.
Zustandsraum: Historische Einordnung Die Grundlagen der Zustandsraummethoden wurden im Zeitraum 1955 1965 von Kalman und seinen Kollegen in dem Research Institute for Advanced Studies in Baltimore entwickelt.
Inhaltsverzeichnis. 1 Lineare Algebra 12
 Inhaltsverzeichnis 1 Lineare Algebra 12 1.1 Vektorrechnung 12 1.1.1 Grundlagen 12 1.1.2 Lineare Abhängigkeit 18 1.1.3 Vektorräume 22 1.1.4 Dimension und Basis 24 1.2 Matrizen 26 1.2.1 Definition einer
Inhaltsverzeichnis 1 Lineare Algebra 12 1.1 Vektorrechnung 12 1.1.1 Grundlagen 12 1.1.2 Lineare Abhängigkeit 18 1.1.3 Vektorräume 22 1.1.4 Dimension und Basis 24 1.2 Matrizen 26 1.2.1 Definition einer
Vorlesungsfolien Mathematik 3 WS 2010/11 UMIT. Einleitung
 Vorlesungsfolien Mathematik 3 WS 2010/11 Dr. Leonhard Wieser UMIT Einleitung Begriff Vektoranalysis: Kombination aus Linearer Algebra/Vektorrechnung mit Differential- und Integralrechnung Inhaltsangabe:
Vorlesungsfolien Mathematik 3 WS 2010/11 Dr. Leonhard Wieser UMIT Einleitung Begriff Vektoranalysis: Kombination aus Linearer Algebra/Vektorrechnung mit Differential- und Integralrechnung Inhaltsangabe:
4 Affine Koordinatensysteme
 4 Affine Koordinatensysteme Sei X φ ein affiner Raum und seien p,, p r X Definition: Nach ( c ist der Durchschnitt aller affinen Unterräume Z X, welche die Menge {p,,p r } umfassen, selbst ein affiner
4 Affine Koordinatensysteme Sei X φ ein affiner Raum und seien p,, p r X Definition: Nach ( c ist der Durchschnitt aller affinen Unterräume Z X, welche die Menge {p,,p r } umfassen, selbst ein affiner
Einführung in die Volkswirtschaftslehre
 Einführung in die Volkswirtschaftslehre Übung 1: Mathematische Analyseinstrumente Dipl.-Volksw. J.-E.Wesselhöft/ Dipl.-Volksw. J.Freese Bachelor Modul Volkswirtschaftliche Analyse (WS-14-V-03) HT 2009
Einführung in die Volkswirtschaftslehre Übung 1: Mathematische Analyseinstrumente Dipl.-Volksw. J.-E.Wesselhöft/ Dipl.-Volksw. J.Freese Bachelor Modul Volkswirtschaftliche Analyse (WS-14-V-03) HT 2009
11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen
 11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen Ziel: Wir wollen lokale Extrema von Funktionen f : M R untersuchen, wobei M R n eine k-dimensionale Untermannigfaltigkeit des
11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen Ziel: Wir wollen lokale Extrema von Funktionen f : M R untersuchen, wobei M R n eine k-dimensionale Untermannigfaltigkeit des
Modellieren in der Angewandten Geologie II. Sebastian Bauer
 Modellieren in der Angewandten Geologie II Geohydromodellierung Institut für Geowissenschaften Christian-Albrechts-Universität zu Kiel CAU 3-1 Die Finite Elemente Method (FEM) ist eine sehr allgemeine
Modellieren in der Angewandten Geologie II Geohydromodellierung Institut für Geowissenschaften Christian-Albrechts-Universität zu Kiel CAU 3-1 Die Finite Elemente Method (FEM) ist eine sehr allgemeine
Mathematik II Frühlingsemester 2015 Kap. 9: Funktionen von mehreren Variablen 9.2 Partielle Differentiation
 Mathematik II Frühlingsemester 2015 Kap. 9: Funktionen von mehreren Variablen 9.2 Partielle Differentiation www.math.ethz.ch/education/bachelor/lectures/fs2015/other/mathematik2 biol Prof. Dr. Erich Walter
Mathematik II Frühlingsemester 2015 Kap. 9: Funktionen von mehreren Variablen 9.2 Partielle Differentiation www.math.ethz.ch/education/bachelor/lectures/fs2015/other/mathematik2 biol Prof. Dr. Erich Walter
Das Unschärfeprodukt x p in der klassischen Mechanik Seminar zur Theorie der Atome, Kerne und kondensierten Materie. Jonas Lübke
 Das Unschärfeprodukt x p in der klassischen Mechanik Seminar zur Theorie der Atome, Kerne und kondensierten Materie Jonas Lübke 7. November 013 Inhaltsverzeichnis 1 Einführung 1 Beziehung zwischen klassischer
Das Unschärfeprodukt x p in der klassischen Mechanik Seminar zur Theorie der Atome, Kerne und kondensierten Materie Jonas Lübke 7. November 013 Inhaltsverzeichnis 1 Einführung 1 Beziehung zwischen klassischer
f f(x ɛξ) f(x) 0, d.h. f (x)ξ = 0 für alle ξ B 1 (0). Also f (x) = 0. In Koordinaten bedeutet dies gerade, dass in Extremstellen gilt: f(x) = 0.
 f(x) 0, d.h. f (x)ξ = 0 für alle ξ B 1 (0). Also f (x) = 0. In Koordinaten bedeutet dies gerade, dass in Extremstellen gilt: f(x) = 0.") Mehrdimensionale Dierenzialrechnung 9 Optimierung 9 Optimierung Definition Seien U R n oen, f : U R, x U x heiÿt lokales Maximum, falls eine Umgebung V U von x existiert mit y V : fx fy x heiÿt lokales
Mehrdimensionale Dierenzialrechnung 9 Optimierung 9 Optimierung Definition Seien U R n oen, f : U R, x U x heiÿt lokales Maximum, falls eine Umgebung V U von x existiert mit y V : fx fy x heiÿt lokales
Dämpfung. . Grundlagen. Viskose Dämpfung. Modale Dämpfung. Rayleigh-Dämpfung. Strukturdämpfung. Elastodynamik 2 SS
 Dämpfung. Grundlagen. Viskose Dämpfung. Modale Dämpfung. Rayleigh-Dämpfung. Strukturdämpfung 5. Dämpfung 5-1 1. Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische Energie
Dämpfung. Grundlagen. Viskose Dämpfung. Modale Dämpfung. Rayleigh-Dämpfung. Strukturdämpfung 5. Dämpfung 5-1 1. Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische Energie
4.2 Der Harmonische Oszillator
 Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Inhalt. 1 Rechenoperationen Gleichungen und Ungleichungen... 86
 Inhalt 1 Rechenoperationen.................................. 13 1.1 Grundbegriffe der Mengenlehre und Logik............................. 13 1.1.0 Vorbemerkung.................................................
Inhalt 1 Rechenoperationen.................................. 13 1.1 Grundbegriffe der Mengenlehre und Logik............................. 13 1.1.0 Vorbemerkung.................................................
Lorentz-Transformation
 Lorentz-Transformation Aus Sicht von Alice fliegt Bob nach rechts. Aus Sicht von Bob fliegt Alice nach links. Für t = t' = 0 sei also x(0) = x'(0) = Lichtblitz starte bei t = t' = 0 in und erreiche etwas
Lorentz-Transformation Aus Sicht von Alice fliegt Bob nach rechts. Aus Sicht von Bob fliegt Alice nach links. Für t = t' = 0 sei also x(0) = x'(0) = Lichtblitz starte bei t = t' = 0 in und erreiche etwas
Grundlagen, Vorgehensweisen, Aufgaben, Beispiele
 Hans Benker - Wirtschaftsmathematik Problemlösungen mit EXCEL Grundlagen, Vorgehensweisen, Aufgaben, Beispiele Mit 138 Abbildungen vieweg TEIL I: EXCEL 1 EXCEL: Einführung 1 1.1 Grundlagen 1 1.1.1 Tabellenkalkulation
Hans Benker - Wirtschaftsmathematik Problemlösungen mit EXCEL Grundlagen, Vorgehensweisen, Aufgaben, Beispiele Mit 138 Abbildungen vieweg TEIL I: EXCEL 1 EXCEL: Einführung 1 1.1 Grundlagen 1 1.1.1 Tabellenkalkulation
Einführung in die Astronomie und Astrophysik I
 Einführung in die Astronomie und Astrophysik I Teil 5 Jochen Liske Hamburger Sternwarte jochen.liske@uni-hamburg.de Themen Einstieg: Was ist Astrophysik? Koordinatensysteme Astronomische Zeitrechnung Sonnensystem
Einführung in die Astronomie und Astrophysik I Teil 5 Jochen Liske Hamburger Sternwarte jochen.liske@uni-hamburg.de Themen Einstieg: Was ist Astrophysik? Koordinatensysteme Astronomische Zeitrechnung Sonnensystem
Da Atome viele ununterscheidbare Elektronen besitzen, sind ihre Zustände durch interelektronische Coulomb- und Austausch-Wechselwirkungen bestimmt.
 12 Moleküle Slide 267 Vorbemerkungen Da Atome viele ununterscheidbare Elektronen besitzen, sind ihre Zustände durch interelektronische Coulomb- und Austausch-Wechselwirkungen bestimmt. Je 2 Elektronen
12 Moleküle Slide 267 Vorbemerkungen Da Atome viele ununterscheidbare Elektronen besitzen, sind ihre Zustände durch interelektronische Coulomb- und Austausch-Wechselwirkungen bestimmt. Je 2 Elektronen
Copula Funktionen. Eine Einführung. Nils Friewald
 Copula Funktionen Eine Einführung Nils Friewald Institut für Managementwissenschaften Abteilung Finanzwirtschaft und Controlling Favoritenstraße 9-11, 1040 Wien friewald@imw.tuwien.ac.at 13. Juni 2005
Copula Funktionen Eine Einführung Nils Friewald Institut für Managementwissenschaften Abteilung Finanzwirtschaft und Controlling Favoritenstraße 9-11, 1040 Wien friewald@imw.tuwien.ac.at 13. Juni 2005
Computational Astrophysics 1. Kapitel: Sonnensystem
 Computational Astrophysics 1. Kapitel: Sonnensystem Wilhelm Kley Institut für Astronomie & Astrophysik Kepler Center for Astro and Particle Physics Sommersemester 2011 W. Kley: Computational Astrophysics
Computational Astrophysics 1. Kapitel: Sonnensystem Wilhelm Kley Institut für Astronomie & Astrophysik Kepler Center for Astro and Particle Physics Sommersemester 2011 W. Kley: Computational Astrophysics
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2016 Lineare Gleichungssysteme Schwerpunkte: Interpretation und Verständnis der Gleichungen Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik unter
Brückenkurs Mathematik TU Dresden 2016 Lineare Gleichungssysteme Schwerpunkte: Interpretation und Verständnis der Gleichungen Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik unter
Geometrische Objekte im 3-dimensionalen affinen Raum oder,... wie nützlich ist ein zugehöriger Vektorraum der Verschiebungen
 Geometrische Objekte im -dimensionalen affinen Raum Bekanntlich versteht man unter geometrischen Objekten Punktmengen, auf die man die üblichen Mengenoperationen wie z.b.: Schnittmenge bilden: - aussagenlogisch:
Geometrische Objekte im -dimensionalen affinen Raum Bekanntlich versteht man unter geometrischen Objekten Punktmengen, auf die man die üblichen Mengenoperationen wie z.b.: Schnittmenge bilden: - aussagenlogisch:
Fallender Stein auf rotierender Erde
 Übungen zu Theoretische Physik I - Mechanik im Sommersemester 2013 Blatt 4 vom 13.05.13 Abgabe: 27. Mai Aufgabe 16 4 Punkte allender Stein auf rotierender Erde Wir lassen einen Stein der Masse m in einen
Übungen zu Theoretische Physik I - Mechanik im Sommersemester 2013 Blatt 4 vom 13.05.13 Abgabe: 27. Mai Aufgabe 16 4 Punkte allender Stein auf rotierender Erde Wir lassen einen Stein der Masse m in einen
H. Gruber, R. Neumann. Erfolg im Mathe-Abi. Übungsbuch für den Pflichtteil Baden-Württemberg mit Tipps und Lösungen
 H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für den Pflichtteil Baden-Württemberg mit Tipps und Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Themen des Pflichtteils... Analysis Von der Gleichung
H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für den Pflichtteil Baden-Württemberg mit Tipps und Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Themen des Pflichtteils... Analysis Von der Gleichung
Eigenwerte und Diagonalisierung
 Eigenwerte und Diagonalisierung Wir wissen von früher: Seien V und W K-Vektorräume mit dim V = n, dim W = m und sei F : V W linear. Werden Basen A bzw. B in V bzw. W gewählt, dann hat F eine darstellende
Eigenwerte und Diagonalisierung Wir wissen von früher: Seien V und W K-Vektorräume mit dim V = n, dim W = m und sei F : V W linear. Werden Basen A bzw. B in V bzw. W gewählt, dann hat F eine darstellende
++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen dx+ey+f = 0 1.1
 Hauptachsentransformation. Einleitung Schneidet man den geraden Kreiskegel mit der Gleichung = + und die Ebene ++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen +2 + +dx+ey+f = 0. Die
Hauptachsentransformation. Einleitung Schneidet man den geraden Kreiskegel mit der Gleichung = + und die Ebene ++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen +2 + +dx+ey+f = 0. Die
Lineare Algebra und analytische Geometrie
 TI voyage 200 Kompaktwissen Lineare Algebra und analytische Geometrie Eine kleine Hilfe für Schüler der DSB Seite 2 TI voyage 200 Kompaktwissen Algebra/Geometrie Diese Anleitung soll helfen, Aufgaben aus
TI voyage 200 Kompaktwissen Lineare Algebra und analytische Geometrie Eine kleine Hilfe für Schüler der DSB Seite 2 TI voyage 200 Kompaktwissen Algebra/Geometrie Diese Anleitung soll helfen, Aufgaben aus
4.3 Bilinearformen. 312 LinAlg II Version Juni 2006 c Rudolf Scharlau
 312 LinAlg II Version 0 20. Juni 2006 c Rudolf Scharlau 4.3 Bilinearformen Bilinearformen wurden bereits im Abschnitt 2.8 eingeführt; siehe die Definition 2.8.1. Die dort behandelten Skalarprodukte sind
312 LinAlg II Version 0 20. Juni 2006 c Rudolf Scharlau 4.3 Bilinearformen Bilinearformen wurden bereits im Abschnitt 2.8 eingeführt; siehe die Definition 2.8.1. Die dort behandelten Skalarprodukte sind
2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n
![2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n](/thumbs/49/25862272.jpg "2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n") 2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n f ist in dem Fall ein Weg in R n. Das Bild f(t) des Weges wird als Kurve
2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n f ist in dem Fall ein Weg in R n. Das Bild f(t) des Weges wird als Kurve
8 Euklidische Vektorräume und Fourierreihen
 Mathematik für Ingenieure II, SS 9 Dienstag 7.7 $Id: fourier.te,v 1.6 9/7/7 13:: hk Ep $ $Id: diff.te,v 1. 9/7/7 16:13:53 hk Ep $ 8 Euklidische Vektorräume und Fourierreihen 8.4 Anwendungen auf Differentialgleichungen
Mathematik für Ingenieure II, SS 9 Dienstag 7.7 $Id: fourier.te,v 1.6 9/7/7 13:: hk Ep $ $Id: diff.te,v 1. 9/7/7 16:13:53 hk Ep $ 8 Euklidische Vektorräume und Fourierreihen 8.4 Anwendungen auf Differentialgleichungen
Corinne Schenka Vorkurs Mathematik WiSe 2012/13
 4. Lineare Gleichungssysteme Ein lineares Gleichungssystem ist ein System aus Gleichungen mit Unbekannten, die nur linear vorkommen. Dieses kann abkürzend auch in Matrizenschreibweise 1 notiert werden:
4. Lineare Gleichungssysteme Ein lineares Gleichungssystem ist ein System aus Gleichungen mit Unbekannten, die nur linear vorkommen. Dieses kann abkürzend auch in Matrizenschreibweise 1 notiert werden:
Wellen und wandernde Wellen Ähnlichkeitslösungen. Crashkurs PDG anhand von Beispielen. Wellen
 Wellen Crashkurs PDG anhand von Beispielen Eine Welle ist ein erkennbares Signal, welches innerhalb eines Mediums von einer Seite zur anderen übertragen wird, mit einer erkennbaren Ausbreitungsgeschwindigkeit.
Wellen Crashkurs PDG anhand von Beispielen Eine Welle ist ein erkennbares Signal, welches innerhalb eines Mediums von einer Seite zur anderen übertragen wird, mit einer erkennbaren Ausbreitungsgeschwindigkeit.
Das wissen Sie: 6. Welche Möglichkeiten zur Darstellung periodischer Funktionen (Signalen) kennen Sie?
 kennen Sie?") Das wissen Sie: 1. Wann ist eine Funktion (Signal) gerade, ungerade, harmonisch, periodisch (Kombinationsbeispiele)? 2. Wie lassen sich harmonische Schwingungen mathematisch beschreiben und welche Beziehungen
Das wissen Sie: 1. Wann ist eine Funktion (Signal) gerade, ungerade, harmonisch, periodisch (Kombinationsbeispiele)? 2. Wie lassen sich harmonische Schwingungen mathematisch beschreiben und welche Beziehungen
11. Nichtlineare Dynamik und Chaos. Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt.
 11. Nichtlineare Dynamik und Chaos Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt. der Auslenkung Fadenlänge L, Masse m, Auslenkwinkel φ Rücktreibende Kraft: Beschleunigung:
11. Nichtlineare Dynamik und Chaos Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt. der Auslenkung Fadenlänge L, Masse m, Auslenkwinkel φ Rücktreibende Kraft: Beschleunigung:
Mathematik für Wirtschaftswissenschaftler Kapitel 4-6. Universität Trier Wintersemester 2013 / 2014
 Mathematik für Kapitel 4-6 Universität Trier Wintersemester 2013 / 2014 Kapitel 4 1. Extremwerte 2. Lokale Optimalpunkte 3. Wendepunkte 2 Kapitel 4.1 EXTREMWERTE 3 Extrempunkte und Extremwerte 4 Strikte
Mathematik für Kapitel 4-6 Universität Trier Wintersemester 2013 / 2014 Kapitel 4 1. Extremwerte 2. Lokale Optimalpunkte 3. Wendepunkte 2 Kapitel 4.1 EXTREMWERTE 3 Extrempunkte und Extremwerte 4 Strikte
5. Fourier-Transformation
 Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Relativität und Realität
 Max Drömmer Relativität und Realität Zur Physik und Philosophie der allgemeinen und der speziellen Relativitätstheorie mentis PADERBORN Inhaltsverzeichnis Vorwort... 15 Einleitung... 17 Kapitel 1 Allgemeine
Max Drömmer Relativität und Realität Zur Physik und Philosophie der allgemeinen und der speziellen Relativitätstheorie mentis PADERBORN Inhaltsverzeichnis Vorwort... 15 Einleitung... 17 Kapitel 1 Allgemeine
Der CG-Algorithmus (Zusammenfassung)
") Der CG-Algorithmus (Zusammenfassung) Michael Karow Juli 2008 1 Zweck, Herkunft, Terminologie des CG-Algorithmus Zweck: Numerische Berechnung der Lösung x des linearen Gleichungssystems Ax = b für eine
Der CG-Algorithmus (Zusammenfassung) Michael Karow Juli 2008 1 Zweck, Herkunft, Terminologie des CG-Algorithmus Zweck: Numerische Berechnung der Lösung x des linearen Gleichungssystems Ax = b für eine
3 Optimierung mehrdimensionaler Funktionen f : R n R
 3 Optimierung mehrdimensionaler Funktionen f : R n R 31 Optimierung ohne Nebenbedingungen Optimierung heißt eigentlich: Wir suchen ein x R n so, dass f(x ) f(x) für alle x R n (dann heißt x globales Minimum)
3 Optimierung mehrdimensionaler Funktionen f : R n R 31 Optimierung ohne Nebenbedingungen Optimierung heißt eigentlich: Wir suchen ein x R n so, dass f(x ) f(x) für alle x R n (dann heißt x globales Minimum)
Ausarbeitung zum Thema: Port-hamiltonsche Systeme
 Ausarbeitung zum Thema: Port-hamiltonsche Systeme Von F. Schulz WS 05/06 1 Inhaltsverzeichnis 1 Einführung 3 2 Port- hamiltonsche Systeme 3 2.1 Euler-Lagrange- und Hamiltonsche Gleichungen...............
Ausarbeitung zum Thema: Port-hamiltonsche Systeme Von F. Schulz WS 05/06 1 Inhaltsverzeichnis 1 Einführung 3 2 Port- hamiltonsche Systeme 3 2.1 Euler-Lagrange- und Hamiltonsche Gleichungen...............
2. Aufgabe Vereinfachen Sie die folgenden Ausdrücke so, dass möglichst wenige Multiplikationen ausgeführt werden müssen!
 Studiengang: PT/LOT/PVHT Semester: WS 9/ lgebra Serie: 2 Thema: Matrizen, Determinanten. ufgabe Gegeben sind die Matrizen = µ 2 3 2 µ 3 2 4, B = 2 Berechnen Sie: a) 2 + 3B b) B 2 c) B T d) B T e) T B f)
Studiengang: PT/LOT/PVHT Semester: WS 9/ lgebra Serie: 2 Thema: Matrizen, Determinanten. ufgabe Gegeben sind die Matrizen = µ 2 3 2 µ 3 2 4, B = 2 Berechnen Sie: a) 2 + 3B b) B 2 c) B T d) B T e) T B f)
Algebra 3.
 Algebra 3 www.schulmathe.npage.de Aufgaben 1. In einem kartesischen Koordinatensystem sind die Punkte A( 3), B( ) sowie für jedes a (a R) ein Punkt P a (a a a) gegeben. a) Zeigen Sie, dass alle Punkte
Algebra 3 www.schulmathe.npage.de Aufgaben 1. In einem kartesischen Koordinatensystem sind die Punkte A( 3), B( ) sowie für jedes a (a R) ein Punkt P a (a a a) gegeben. a) Zeigen Sie, dass alle Punkte
Teil 2. Ganzrationale und Gebrochen rationale Funktionen. Unbestimmte Integrale und Stammfunktionen auch mit Substitution
 Teil Ganzrationale und Gebrochen rationale Funktionen ANALYSIS Einführung in die Integralrechnung Unbestimmte Integrale und Stammfunktionen auch mit Substitution Kurze Theorie und dann Viel Praxis Datei
Teil Ganzrationale und Gebrochen rationale Funktionen ANALYSIS Einführung in die Integralrechnung Unbestimmte Integrale und Stammfunktionen auch mit Substitution Kurze Theorie und dann Viel Praxis Datei
Drehbewegungen (Rotation)
") Drehbewegungen (Rotation) Drehungen (Rotation) Die allgemeine Bewegung eines Systems von Massepunkten lässt sich immer zerlegen in: und Translation Rotation Drehungen - Rotation Die kinematischen Variablen
Drehbewegungen (Rotation) Drehungen (Rotation) Die allgemeine Bewegung eines Systems von Massepunkten lässt sich immer zerlegen in: und Translation Rotation Drehungen - Rotation Die kinematischen Variablen
Thema: Eigenschaften von Funktionen (Wiederholung und Symmetrie, Nullstellen, Transformation)
") 1. Halbjahr EF 2. Halbjahr EF Einführungsphase (EF) Vektoren, ein Schlüsselkonzept (Punkte, Vektoren, Rechnen mit Vektoren, Betrag) Eigenschaften von Funktionen (Wiederholung und Symmetrie, Nullstellen,
1. Halbjahr EF 2. Halbjahr EF Einführungsphase (EF) Vektoren, ein Schlüsselkonzept (Punkte, Vektoren, Rechnen mit Vektoren, Betrag) Eigenschaften von Funktionen (Wiederholung und Symmetrie, Nullstellen,