Digitale Regelung. Vorlesung: Seminarübungen: Dozent: Professor Ferdinand Svaricek Ort: 33/2211 Zeit:Di Uhr
|
|
|
- Benjamin Wagner
- vor 8 Jahren
- Abrufe
Transkript
1 Vorlesung: Dozent: Professor Ferdinand Svaricek Ort: 33/2211 Zeit:Di Uhr Seminarübungen: Dozent: Alexander Weber Ort: 33/1101 Zeit: Mo Uhr (Beginn: ) Vorlesungsskript:

2 Motivation Die reale Welt ist überwiegend analog und kontinuierlich. Die meisten Regler werden aber inzwischen mit Hilfe von Computern realisiert, die nur zeitdiskreteund amplitudenquantisierte Signale verarbeiten können. Einfache Realisierung komplexer Regelungs-, Steuerungs- und Überwachungsalgorithmen. Realisierung in Software anstatt Hardware ist kostengünstiger. Flexibilität (einfache Anpassung und Änderung der Algorithmen). Kürzere Entwicklungszeiten (Rapid Prototyping).

3 Einordnung Die Vorlesung befaßt sich mit den Grundlagen der Regelung zeitabgetasteter Systeme (Synonyme: zeitdiskrete Regelung oder Abtastregelung). Die digitale Regelungstechnikbefaßt sich mit der Analyse und der Synthese zeitdiskreter Regelkreise. Sowohl in modernen Kraftfahrzeugenals auch in modernen Flugzeugenwerden Steuerungen und Regelungen heutzutage überwiegend digital realisiert.

4 Steuer- und Regelungstechnik Voraussetzungen Gewichts- und Übergangsfunktion, Übertragungsfunktion, Pole und Nullstellen, Stabilität, PT 1, PT 2,8, Zustandsraummodelle,8 Grundlagen der Messtechnik Analog-/Digital-Umsetzer Fourier-Transformation Spektralanalyse Mathematik Komplexe Zahlen Laplace-Transformation Matrizenrechnung

5 Lerninhalte Diskrete Signale und Systeme Signalarten, Quantisierung, Periodische Signalabtastung, Halteglieder, Impulsfolge, Sprungfolge Beschreibung von dynamischen Systemen im Zeitbereich durch Differenzengleichungen Spektrum diskreter Signale Abtasttheorem Frequenzfaltung, Aliasing

6 Lerninhalte (2) Beschreibung von dynamischen Systemen im Frequenzbereich durch die z-transformation Vergleich mit dem s-bereich z-übertragungsfunktion Pole und Nullstellen Zeitdiskrete Zustandsraumdarstellung Stabilität zeitdiskreter Systeme w-transformation Entwurf digitaler Regler

7 Historischer Hintergrund Die Entwicklung der digitalen Signalverarbeitung und der Regelungstechnik ist eng mit der technischen Entwicklung der Digitalrechner verknüpft Hughes Aircraft Company setzt erstmals einen Digitalrechner zur Überwachung eines Autopiloten ein Louisiana Power & Light Company setzt erstmals einen Digitalrechner zur Überwachung eines Kraftwerks ein Imperial Chemical Industries (ICI) erprobt digitale Regelung (Direct Digital Control) bei der Produktion von Sodaasche Etwa 1000 Digitalrechner sind im industriellen Einsatz. Digital Equipment Corporation (DEC) bringt den Minicomputer PDP-8 (Kosten $18000) auf den Markt.
 erprobt digitale Regelung (Direct Digital Control) bei der Produktion von Sodaasche.")
8 Einführung Abtastregelung bzw. zeitdiskretes Regelungssystem Kontinuierlicher Regelkreis Im Regelkreis sind Elemente enthalten, die Signale nur zu diskreten Zeitpunkten übertragen. Unterscheidung: Regelkreis mit Digitalrechner als Regler Analoge Signale Digitale Signale

9 Definition: Kontinuierliches analoges Signal Ein kontinuierliches analoges Signal kann jeden beliebigen Wert auf der Amplituden- bzw. Zeitachse annehmen. Beschreibung von Signalen Definition: Kontinuierliches quantisiertes Signal Ein kontinuierliches quantisiertes Signalkann jeden beliebigen Wert auf der Zeitachse, aber nur bestimmte Amplitudenwerte annehmen.

10 Quantisierung Bei der gleichförmigen Quantisierungwird der Quantisierungsbereich in 2 w gleichgroße Intervalle aufgeteilt. Hierbei ist wdie Anzahl der zur Verfügung stehenden Bits, man spricht hier auch von der Wortlänge. Beispiel: Quantisierungsbereich: 0 10 Volt Wortlänge: 3 bit Anzahl der Intervalle: 2 3 = 8 Intervallbreite: 10/8 = 1,25 Volt ,25 2,5 3,75 5 6,25 7,5 8,75

11 Beschreibung von Signalen (2) Definition: Zeitdiskretes Signal Ein zeitdiskretes Signalkann nur zu bestimmten Zeitpunkten einen beliebigen Wert auf der Amplitudenachse annehmen. Definition: Digitales Signal Ein digitales Signalkann zu bestimmten Zeitpunkten nur einen quantisierten Amplitudenwert annehmen. 6,25 5,0 3,75 2,5 1,25 t 0 t 1 t 2 t 3

12 Definition: Deterministisches Signal Ein deterministisches Signallässt sich in seinem zeitlichen Verlauf mathematisch beschreiben und ist daher exakt bestimmbar. Beschreibung von Signalen (3) Definition: Periodisches Signal Ein periodisches Signalwiederholt sich in gleichbleibenden Zeitintervallen T 0 : x(t) = x(t+ k T) 0 mit k=1,2,3,.... periodisch Signalwert Periodendauer T 0 Zeit
 = x(t+ k T) 0 mit k=1,2,3,.")
13 Definition: Stochastisches Signal Ein stochastisches Signalhängt in seinem zeitlichen Verlauf vom Zufall ab. Beschreibung von Signalen (4) Signalwert Zeit
")
14 Abtastung Ein zeitdiskretes Signalkann man aus einem kontinuierlichen Signal durch Abtastung gewinnen. y(0) y(1) y(2) y(3) Durch Abtastung des kontinuierlichen Signals y(t)zu den Zeitpunkten t 0, t 1, t 2,... erhält man das zeitdiskrete Signal oder die Abtastfolge y(t k ) = y(t). t=t k k Periodische Abtastung ADU: Analog-Digital-Umsetzer T: Vorgegebener Takt idealer Taster
 = y(t).")
15 Analog-Digital-Umsetzer In einem A/D Umsetzer wird ein kontinuierliches Signal zeitdiskretisiert und amplitudenquantisiert. Der Effekt der Amplitudenquantisierung ist bei hinreichend großer Auflösung für die Dynamik des Regelkreises vernachlässigbar. Im weiteren wird äquidistanteabtastung vorausgesetzt. Die Tastperiode Tist aber ein wesentlicher Analyse-und Syntheseparameter, der erheblichen Einfluß auf die Dynamik des Regelkreises hat.

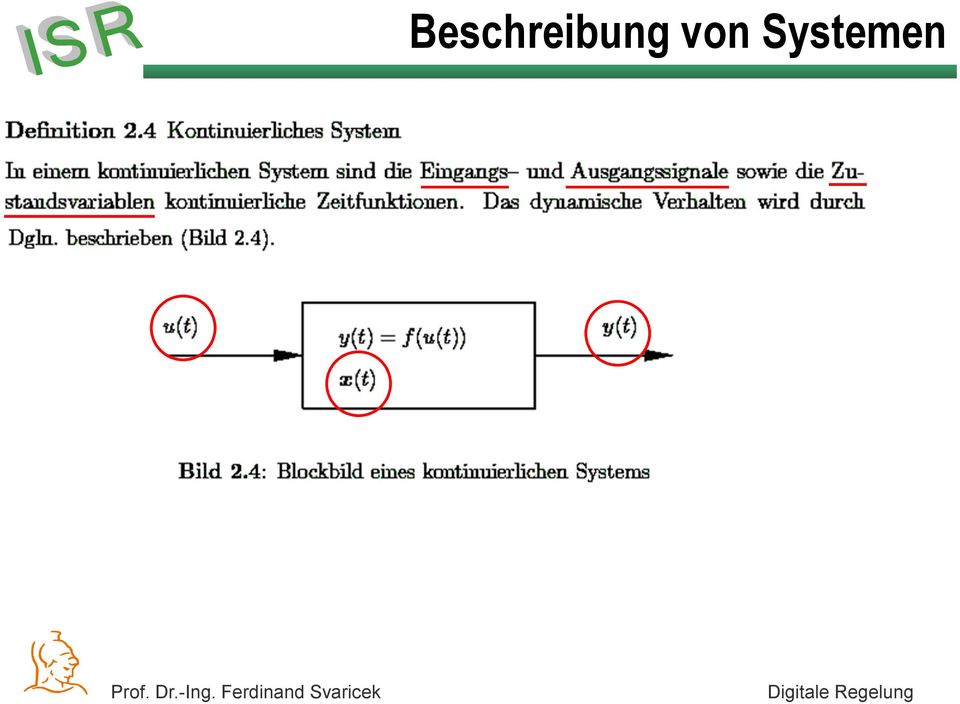
16 Beschreibung von Systemen
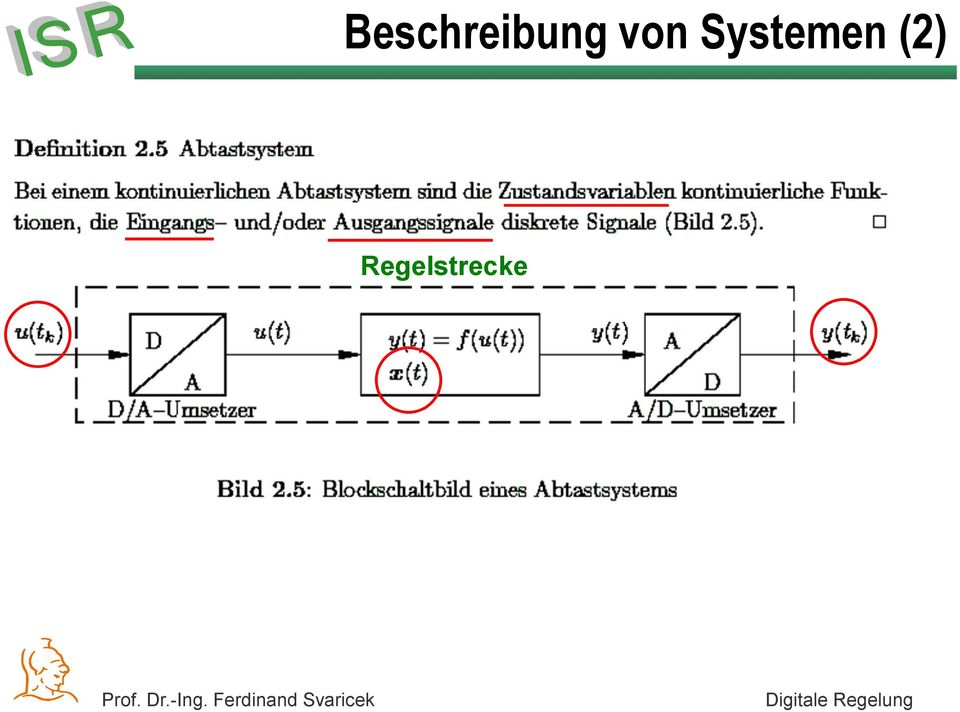
17 Beschreibung von Systemen (2) Regelstrecke
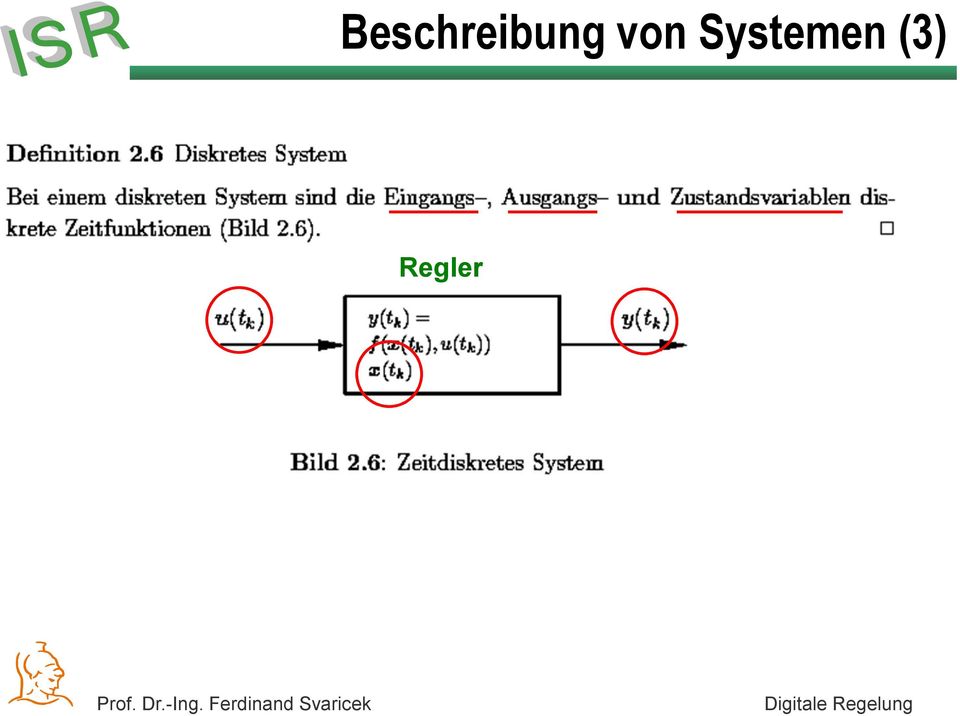
18 Beschreibung von Systemen (3) Regler
19 Schreibweise diskreter Signale Durch Abtastung des kontinuierlichen Signals y(t)zu den Zeitpunkten t 1, t 2, t 3,...erhält man das zeitdiskrete Signal oder die Abtastfolge y(t k ) = y(t). t=t k k Beispiel: y(0,5), y(0,7), y(0,8),... Wird eine äquidistanteabtastung mit dem Abtastintervall Tvorgenommen, so kann man auch diese abgekürzte Schreibweise verwenden: Beispiel: y k = y(k) = y(kt) = y(t) t=kt. Für T=0,1 bedeutet dies y(3) = y(3t) = y(0,3) Die Bezeichung y k kann dabei sowohl für einen einzelnen Abtastwert als auch für eine ganze Abtastfolge stehen.
 = y(kt) = y(t) t=kt.")
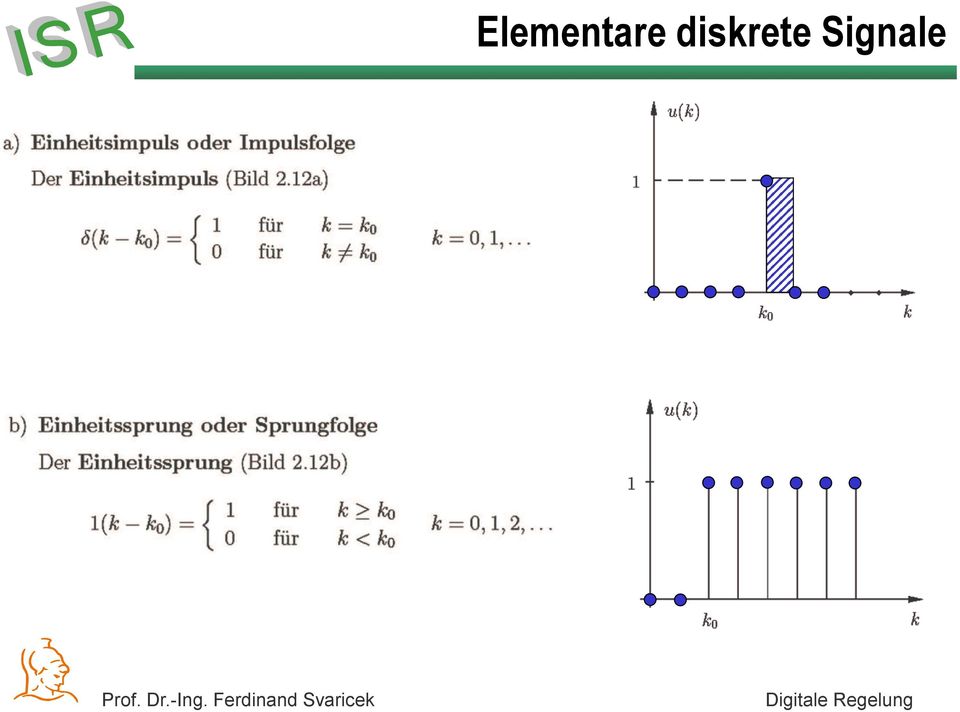
20 Elementare diskrete Signale
21 Energie- und Leistungssignale Die Energie eines diskreten bzw. kontinuierlichen Signals ist definiert zu: diskret: E X = k = x(k) 2 kontinuierlich: E x = 2 x(t) dt Energiesignale weisen eine endliche Energie auf. Beispiel: Impulsfolge mit E = 1
22 Energie- und Leistungssignale (2) Die Leistung eines diskreten bzw. kontinuierlichen Signals ist definiert zu: diskret: P = lim X n n 1 2n+ 1 + n k = n x(k) 2 kontinuierlich: T 1 P x = lim T 2T T 2 x(t) dt Leistungssignale weisen eine endliche Leistung auf. Beispiel:Sprungfolge mit 1 P= lim n n 2n Leistungssignale haben immer eine unendliche Energie! =
23 Eigenschaften diskreter Systeme Betrachtet werden lineare, zeitinvariante, kausale Systeme Beispiel: y 1 (k) + y 2 (k) = f(u 1 (k)) + f(u 2 (k)) = f(u 1 (k) + u 2 (k))
24 Eigenschaften diskreter Systeme (2) Zeitinvarianz Ein zeitdiskretes System verhält sich zeitinvariant, wenn ein zeitverschobenes Eingangssignal u(k - k 0 ) das zeitverschobene Ausgangssignal y(k - k 0 )erzeugt. 0 u(k) y(k) u(k) k Zeitinvariantes Systemverhalten y(k) k k 0 k k 0 k
25 Eigenschaften diskreter Systeme (3)
26 Eigenschaften diskreter Systeme (4) Faltungssummation t 0 g(t τ)u( τ)dτ Faltungsintegral t 0 g( υ)u(t υ)dυ
27 Eigenschaften diskreter Systeme (5) Beispiel: Ty(t) ɺ + y(t) = u(t) 1 PT 1 -System Approximation von dy(t)/dt durch den Differenzenquotienten: dy(t) dt t= kt y(kt) y((k 1)T) = T y(k) y(k 1) T T = Abtastintervall
28 Aus Eigenschaften diskreter Systeme (6) y(k) y(k 1) Ty(t) ɺ 1 + y(t) = u(t) T 1 + y(k) = u(k) T Beide Seiten mit T multiplizieren: T(y(k) 1 y(k 1)) + Ty(k) = Tu(k) (T1 + T)y(k) Ty(k 1 1) = Tu(k) Auflösen nach y(k): 1 y(k) = (T1 y(k 1) + Tu(k)) T + T 1 T T y(k 1) u(k) T + T T + T 1 = = a y(k 1) + bu( k) 1 0
29 Eigenschaften diskreter Systeme (7) Differenzengleichung eines zeitdiskreten Systems Differenzengleichungen stellen einen Rekursionsalgorithmus dar, der mit einem Digitalrechner schrittweise gelöst werden kann.
 b0 = T/(T1+T) % uk = 1; % % Anfangsbedingung y(0) = 0 % y0 = 0; % % Berechnung der Ausgangsfolge für k = 1,2,3,4.")
30 Eigenschaften diskreter Systeme (8) % Sprungantwort für die Differenzengleichung 1. Ordnung % y(k) = -a1* y(k-1) + b0 * u(k) % als Approximation der DGL % T1 * dy(t)/dt + y(t) = u(t) % T1 = 1; T = 0.1; a1 = -T1/(T1+T) b0 = T/(T1+T) % uk = 1; % % Anfangsbedingung y(0) = 0 % y0 = 0; % % Berechnung der Ausgangsfolge für k = 1,2,3,4.. % y(1) = -a1* y0 + b0 *uk; for i=2:100 y(i) = -a1* y(i-1) + b0 * uk; end % % Graphische Darstellung der Ausgangsfolge T % 1 stem(y(1:50)) xlabel('k') ylabel('y(k)') title(['zeitkonstante T1 = ', num2str(t1),' Abtastintervall T = ' num2str(t)])
31 Ty(t) + y(t) = u(t) ɺ 1 Eigenschaften diskreter Systeme (9) T ɺ 1 T y(k) = y(k 1) + u(k) T + T T + T Zeitkonstante T1 = 1 Abtastintervall T = Zeitkonstante T1 = 1 Abtastintervall T = y(t), y(k) y(t), y(k) Time (sec) Time (sec)
Institut für Leistungselektronik und Elektrische Antriebe. Übungen Regelungstechnik 2
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Zusammenfassung der 6. Vorlesung
 Zusammenfassung der 6. Vorlesung w-transformation Die w-transformationbildet das Innere des Einheitskreises der z-ebene in die linke w-ebene ab. z 1 w= z+1, bzw. z= 1+w 1 w Nach Anwendung der w-transformationist
Zusammenfassung der 6. Vorlesung w-transformation Die w-transformationbildet das Innere des Einheitskreises der z-ebene in die linke w-ebene ab. z 1 w= z+1, bzw. z= 1+w 1 w Nach Anwendung der w-transformationist
Probeklausur Signale + Systeme Kurs TIT09ITA
 Probeklausur Signale + Systeme Kurs TIT09ITA Dipl.-Ing. Andreas Ströder 13. Oktober 2010 Zugelassene Hilfsmittel: Alle außer Laptop/PC Die besten 4 Aufgaben werden gewertet. Dauer: 120 min 1 Aufgabe 1
Probeklausur Signale + Systeme Kurs TIT09ITA Dipl.-Ing. Andreas Ströder 13. Oktober 2010 Zugelassene Hilfsmittel: Alle außer Laptop/PC Die besten 4 Aufgaben werden gewertet. Dauer: 120 min 1 Aufgabe 1
Zusammenfassung der 1. Vorlesung
 Zusammenfassung der. Vorlesung Einordnung und Motivation Grundlegende Definitionen Kontinuierliches Signal Quantisiertes Signal Zeitdiskretes Signal Digitales Signal Auflösung der A/D- Umsetzer der MicroAutoBox
Zusammenfassung der. Vorlesung Einordnung und Motivation Grundlegende Definitionen Kontinuierliches Signal Quantisiertes Signal Zeitdiskretes Signal Digitales Signal Auflösung der A/D- Umsetzer der MicroAutoBox
Regelungs- und Systemtechnik 1. Kapitel 1: Einführung
 Regelungs- und Systemtechnik 1 Kapitel 1: Einführung Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Luft- und Raumfahrtindustrie Zu regelnde Größen: Position Geschwindigkeit Beschleunigung
Regelungs- und Systemtechnik 1 Kapitel 1: Einführung Prof. Dr.-Ing. Pu Li Fachgebiet Simulation und Optimale Prozesse (SOP) Luft- und Raumfahrtindustrie Zu regelnde Größen: Position Geschwindigkeit Beschleunigung
Kybernetik LTI-Systeme
 Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Grundlagen der Videotechnik. Redundanz
 Grundlagen der Videotechnik Redundanz Redundanz beruht auf: - statistischen Abhängigkeiten im Signal, - Information, die vorher schon gesendet wurde - generell eine Art Gedächtnis im Signal Beispiel: Ein
Grundlagen der Videotechnik Redundanz Redundanz beruht auf: - statistischen Abhängigkeiten im Signal, - Information, die vorher schon gesendet wurde - generell eine Art Gedächtnis im Signal Beispiel: Ein
2. Eigenschaften digitaler Nachrichtensignale
 FH OOW / Fachb. Technik / Studiengang Elektrotechnik u. Automatisierungstechnik Seite 2-2. Eigenschaften digitaler Nachrichtensignale 2. Abgrenzung zu analogen Signalen Bild 2.- Einteilung der Signale
FH OOW / Fachb. Technik / Studiengang Elektrotechnik u. Automatisierungstechnik Seite 2-2. Eigenschaften digitaler Nachrichtensignale 2. Abgrenzung zu analogen Signalen Bild 2.- Einteilung der Signale
Wichtige Eigenschaft: zeitliche Abnahme der Schallintensität. Akustische Ereignisse sind zeitliche Phänomene mit Anfang und Ende
 Schallaufzeichnung Wichtige Eigenschaft: zeitliche Abnahme der Schallintensität Akustische Ereignisse sind zeitliche Phänomene mit Anfang und Ende Akustische Ereignisse sind vergänglich Akustische Ereignisse
Schallaufzeichnung Wichtige Eigenschaft: zeitliche Abnahme der Schallintensität Akustische Ereignisse sind zeitliche Phänomene mit Anfang und Ende Akustische Ereignisse sind vergänglich Akustische Ereignisse
Skalierung des Ausgangssignals
 Skalierung des Ausgangssignals Definition der Messkette Zur Bestimmung einer unbekannten Messgröße, wie z.b. Kraft, Drehmoment oder Beschleunigung, werden Sensoren eingesetzt. Sensoren stehen am Anfang
Skalierung des Ausgangssignals Definition der Messkette Zur Bestimmung einer unbekannten Messgröße, wie z.b. Kraft, Drehmoment oder Beschleunigung, werden Sensoren eingesetzt. Sensoren stehen am Anfang
Klausur zur Vorlesung Signale und Systeme
 Name: 10. Juli 2008, 11.00-13.00 Uhr Allgemeine Hinweise: Dauer der Klausur: Zugelassene Hilfsmittel: 120 min, 2 Zeitstunden Vorlesungsmitschrift, Mitschrift Übungen, Skript, handgeschriebene 2-seitige
Name: 10. Juli 2008, 11.00-13.00 Uhr Allgemeine Hinweise: Dauer der Klausur: Zugelassene Hilfsmittel: 120 min, 2 Zeitstunden Vorlesungsmitschrift, Mitschrift Übungen, Skript, handgeschriebene 2-seitige
4. Dynamische Optimierung
 4. Dynamische Optimierung Allgemeine Form dynamischer Optimierungsprobleme 4. Dynamische Optimierung Die dynamische Optimierung (DO) betrachtet Entscheidungsprobleme als eine Folge voneinander abhängiger
4. Dynamische Optimierung Allgemeine Form dynamischer Optimierungsprobleme 4. Dynamische Optimierung Die dynamische Optimierung (DO) betrachtet Entscheidungsprobleme als eine Folge voneinander abhängiger
Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT)
") Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT) Ziele In diesem Versuch lernen Sie zwei Anwendungen der Diskreten Fourier-Transformation in der Realisierung als recheneffiziente schnelle
Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT) Ziele In diesem Versuch lernen Sie zwei Anwendungen der Diskreten Fourier-Transformation in der Realisierung als recheneffiziente schnelle
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
Argumente für die diskrete Realisierung der Fourierintegrale
 Argumente für die diskrete Realisierung der Fourierintegrale Die Fouriertransformation gemäß der Beschreibung in Kapitel 3.1 weist aufgrund der unbegrenzten Ausdehnung des Integrationsintervalls eine unendlich
Argumente für die diskrete Realisierung der Fourierintegrale Die Fouriertransformation gemäß der Beschreibung in Kapitel 3.1 weist aufgrund der unbegrenzten Ausdehnung des Integrationsintervalls eine unendlich
Moderne Methoden der Regelungstechnik. Moderne Methoden der Regelungstechnik
 Vorlesung: Dozenten: Professor Ferdinand Svaricek,, PD PD Gunther Reißig ig Ort: Ort: 33/2301 Zeit: Zeit: Di Di 9.45 9.45 11.15 11.15 Uhr Uhr Seminarübungen: Dozent: PD PD Gunther Reißig ig Ort: Ort: 036
Vorlesung: Dozenten: Professor Ferdinand Svaricek,, PD PD Gunther Reißig ig Ort: Ort: 33/2301 Zeit: Zeit: Di Di 9.45 9.45 11.15 11.15 Uhr Uhr Seminarübungen: Dozent: PD PD Gunther Reißig ig Ort: Ort: 036
Zusammenfassung der 2. Vorlesung
 Zusammenfassung der 2. Vorlesung Fourier-Transformation versus Laplace-Transformation Spektrum kontinuierlicher Signale Das Spektrum gibt an, welche Frequenzen in einem Signal vorkommen und welches Gewicht
Zusammenfassung der 2. Vorlesung Fourier-Transformation versus Laplace-Transformation Spektrum kontinuierlicher Signale Das Spektrum gibt an, welche Frequenzen in einem Signal vorkommen und welches Gewicht
DFT / FFT der Titel der Präsentation wiederholt (Ansicht >Folienmaster) Dipl.-Ing. Armin Rohnen, Fakultät 03, rohnen@hm.edu
 Dipl.-Ing. Armin Rohnen, Fakultät 03, rohnen@hm.edu") 1 Grundlagen Abtasttheorem Fenster Zeit - Frequenzauflösung Pegelgenauigkeit Overlap Mittelung 2 2 volle Schwingungen 32 Abtastwerte Amplitude = 1 Pascal Signallänge = 1 Sekunde Eine Frequenzline bei 2
1 Grundlagen Abtasttheorem Fenster Zeit - Frequenzauflösung Pegelgenauigkeit Overlap Mittelung 2 2 volle Schwingungen 32 Abtastwerte Amplitude = 1 Pascal Signallänge = 1 Sekunde Eine Frequenzline bei 2
1 C A = A. y 1 y 2. x 1 x 2. x n B @ B @ C A. y m
 Kapitel Systeme Ein System ist eine Anordnung von miteinander verbundenen Komponenten zur Realisierung einer technischen Aufgabenstellung. Ein System kann als Operator aufgefasst werden, der Eingangsgrößen
Kapitel Systeme Ein System ist eine Anordnung von miteinander verbundenen Komponenten zur Realisierung einer technischen Aufgabenstellung. Ein System kann als Operator aufgefasst werden, der Eingangsgrößen
2004, Thomas Barmetler Automatisierungstechnik - Einstieg. Das EVA-Prinzip
 Das EVA-Prinzip 1 Steuerungsarten Steuerungen lassen sich im Wesentlichen nach folgenden Merkmalen unterscheiden: Unterscheidung nach Art der Informationsdarstellung Diese Unterscheidung bezieht sich auf
Das EVA-Prinzip 1 Steuerungsarten Steuerungen lassen sich im Wesentlichen nach folgenden Merkmalen unterscheiden: Unterscheidung nach Art der Informationsdarstellung Diese Unterscheidung bezieht sich auf
Messtechnik-Praktikum. Spektrumanalyse. Silvio Fuchs & Simon Stützer. c) Berechnen Sie mit FFT (z.b. ORIGIN) das entsprechende Frequenzspektrum.
 Berechnen Sie mit FFT (z.b. ORIGIN) das entsprechende Frequenzspektrum.") Messtechnik-Praktikum 10.06.08 Spektrumanalyse Silvio Fuchs & Simon Stützer 1 Augabenstellung 1. a) Bauen Sie die Schaltung für eine Einweggleichrichtung entsprechend Abbildung 1 auf. Benutzen Sie dazu
Messtechnik-Praktikum 10.06.08 Spektrumanalyse Silvio Fuchs & Simon Stützer 1 Augabenstellung 1. a) Bauen Sie die Schaltung für eine Einweggleichrichtung entsprechend Abbildung 1 auf. Benutzen Sie dazu
Versuch 3. Frequenzgang eines Verstärkers
 Versuch 3 Frequenzgang eines Verstärkers 1. Grundlagen Ein Verstärker ist eine aktive Schaltung, mit der die Amplitude eines Signals vergößert werden kann. Man spricht hier von Verstärkung v und definiert
Versuch 3 Frequenzgang eines Verstärkers 1. Grundlagen Ein Verstärker ist eine aktive Schaltung, mit der die Amplitude eines Signals vergößert werden kann. Man spricht hier von Verstärkung v und definiert
1 Mathematische Grundlagen
 Mathematische Grundlagen - 1-1 Mathematische Grundlagen Der Begriff der Menge ist einer der grundlegenden Begriffe in der Mathematik. Mengen dienen dazu, Dinge oder Objekte zu einer Einheit zusammenzufassen.
Mathematische Grundlagen - 1-1 Mathematische Grundlagen Der Begriff der Menge ist einer der grundlegenden Begriffe in der Mathematik. Mengen dienen dazu, Dinge oder Objekte zu einer Einheit zusammenzufassen.
Technik der Fourier-Transformation
 Was ist Fourier-Transformation? Fourier- Transformation Zeitabhängiges Signal in s Frequenzabhängiges Signal in 1/s Wozu braucht man das? Wie macht man das? k = 0 Fourier- Reihe f ( t) = Ak cos( ωkt) +
Was ist Fourier-Transformation? Fourier- Transformation Zeitabhängiges Signal in s Frequenzabhängiges Signal in 1/s Wozu braucht man das? Wie macht man das? k = 0 Fourier- Reihe f ( t) = Ak cos( ωkt) +
Data Mining: Einige Grundlagen aus der Stochastik
 Data Mining: Einige Grundlagen aus der Stochastik Hagen Knaf Studiengang Angewandte Mathematik Hochschule RheinMain 21. Oktober 2015 Vorwort Das vorliegende Skript enthält eine Zusammenfassung verschiedener
Data Mining: Einige Grundlagen aus der Stochastik Hagen Knaf Studiengang Angewandte Mathematik Hochschule RheinMain 21. Oktober 2015 Vorwort Das vorliegende Skript enthält eine Zusammenfassung verschiedener
Prüfung SS 2008. Mechatronik. Prof. Dr.-Ing. K. Wöllhaf
 Prüfung SS 28 Mechatronik Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung
Prüfung SS 28 Mechatronik Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung
Simulink: Einführende Beispiele
 Simulink: Einführende Beispiele Simulink ist eine grafische Oberfläche zur Ergänzung von Matlab, mit der Modelle mathematischer, physikalischer bzw. technischer Systeme aus Blöcken mittels plug-and-play
Simulink: Einführende Beispiele Simulink ist eine grafische Oberfläche zur Ergänzung von Matlab, mit der Modelle mathematischer, physikalischer bzw. technischer Systeme aus Blöcken mittels plug-and-play
1 Einleitung. 1.1 Motivation und Zielsetzung der Untersuchung
 1 Einleitung 1.1 Motivation und Zielsetzung der Untersuchung Obgleich Tourenplanungsprobleme zu den am häufigsten untersuchten Problemstellungen des Operations Research zählen, konzentriert sich der Großteil
1 Einleitung 1.1 Motivation und Zielsetzung der Untersuchung Obgleich Tourenplanungsprobleme zu den am häufigsten untersuchten Problemstellungen des Operations Research zählen, konzentriert sich der Großteil
Lehrplan. Systemtechnik. Fachschule für Technik. Fachrichtung Mikrosystemtechnik. Fachrichtungsbezogener Lernbereich
 Lehrplan Systemtechnik Fachschule für Technik Fachrichtung Mikrosystemtechnik Fachrichtungsbezogener Lernbereich Ministerium für Bildung, Kultur und Wissenschaft Hohenzollernstraße 60, 66117 Saarbrücken
Lehrplan Systemtechnik Fachschule für Technik Fachrichtung Mikrosystemtechnik Fachrichtungsbezogener Lernbereich Ministerium für Bildung, Kultur und Wissenschaft Hohenzollernstraße 60, 66117 Saarbrücken
Tangentengleichung. Wie lautet die Geradengleichung für die Tangente, y T =? Antwort:
 Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
Signale und Systeme. A1 A2 A3 Summe
 Signale und Systeme - Prof. Dr.-Ing. Thomas Sikora - Name:............................... Vorname:.......................... Matr.Nr:.............................. Ergebnis im Web mit verkürzter Matr.Nr?
Signale und Systeme - Prof. Dr.-Ing. Thomas Sikora - Name:............................... Vorname:.......................... Matr.Nr:.............................. Ergebnis im Web mit verkürzter Matr.Nr?
Definition 3.1: Ein Differentialgleichungssystem 1. Ordnung
 Kapitel 3 Dynamische Systeme Definition 31: Ein Differentialgleichungssystem 1 Ordnung = f(t, y) ; y R N ; f : R R N R N heißt namisches System auf dem Phasenraum R N Der Parameter t wird die Zeit genannt
Kapitel 3 Dynamische Systeme Definition 31: Ein Differentialgleichungssystem 1 Ordnung = f(t, y) ; y R N ; f : R R N R N heißt namisches System auf dem Phasenraum R N Der Parameter t wird die Zeit genannt
Approximation durch Taylorpolynome
 TU Berlin Fakultät II - Mathematik und Naturwissenschaften Sekretariat MA 4-1 Straße des 17. Juni 10623 Berlin Hochschultag Approximation durch Taylorpolynome Im Rahmen der Schülerinnen- und Schüler-Uni
TU Berlin Fakultät II - Mathematik und Naturwissenschaften Sekretariat MA 4-1 Straße des 17. Juni 10623 Berlin Hochschultag Approximation durch Taylorpolynome Im Rahmen der Schülerinnen- und Schüler-Uni
Ü bung GIT- Teil Nachrichtentechnik, 17.11.2015
 Ü bung GIT- Teil Nachrichtentechnik, 17.11.2015 1 OSI Schichtenmodell Systeme der Nachrichtentechnik werden häufig mittels des OSI-Referenzmodells charakterisiert. a) Benennen Sie die Schichten des OSI-Referenzmodells!
Ü bung GIT- Teil Nachrichtentechnik, 17.11.2015 1 OSI Schichtenmodell Systeme der Nachrichtentechnik werden häufig mittels des OSI-Referenzmodells charakterisiert. a) Benennen Sie die Schichten des OSI-Referenzmodells!
Kevin Caldwell. 18.April 2012
 im Rahmen des Proseminars Numerische Lineare Algebra von Prof.Dr.Sven Beuchler 18.April 2012 Gliederung 1 2 3 Mathematische Beschreibung von naturwissenschaftlich-technischen Problemstellungen führt häufig
im Rahmen des Proseminars Numerische Lineare Algebra von Prof.Dr.Sven Beuchler 18.April 2012 Gliederung 1 2 3 Mathematische Beschreibung von naturwissenschaftlich-technischen Problemstellungen führt häufig
7 Rechnen mit Polynomen
 7 Rechnen mit Polynomen Zu Polynomfunktionen Satz. Zwei Polynomfunktionen und f : R R, x a n x n + a n 1 x n 1 + a 1 x + a 0 g : R R, x b n x n + b n 1 x n 1 + b 1 x + b 0 sind genau dann gleich, wenn
7 Rechnen mit Polynomen Zu Polynomfunktionen Satz. Zwei Polynomfunktionen und f : R R, x a n x n + a n 1 x n 1 + a 1 x + a 0 g : R R, x b n x n + b n 1 x n 1 + b 1 x + b 0 sind genau dann gleich, wenn
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen.
 darin vorkommen.") 13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
Eigenwerte und Eigenvektoren von Matrizen
 Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
R ist freie Software und kann von der Website. www.r-project.org
 R R ist freie Software und kann von der Website heruntergeladen werden. www.r-project.org Nach dem Herunterladen und der Installation von R kann man R durch Doppelklicken auf das R-Symbol starten. R wird
R R ist freie Software und kann von der Website heruntergeladen werden. www.r-project.org Nach dem Herunterladen und der Installation von R kann man R durch Doppelklicken auf das R-Symbol starten. R wird
ANSPRECHPARTNER. Film Mathematik statt Rechnen (Quelle: Hochschule Merseburg) Prof. Dr. Axel Kilian Fachbereich Informatik und Kommunikationssysteme
 Prof. Dr. Axel Kilian Fachbereich Informatik und Kommunikationssysteme") ANSPRECHPARTNER Prof. Dr. Axel Kilian Fachbereich Informatik und Kommunikationssysteme Hochschule Merseburg axel.kilian@hs-merseburg.de Film Mathematik statt Rechnen (Quelle: Hochschule Merseburg) HOCHSCHULE
ANSPRECHPARTNER Prof. Dr. Axel Kilian Fachbereich Informatik und Kommunikationssysteme Hochschule Merseburg axel.kilian@hs-merseburg.de Film Mathematik statt Rechnen (Quelle: Hochschule Merseburg) HOCHSCHULE
Ein Einfaches AIDS Modell
 Ein Einfaches AIDS Modell Martin Bauer: 990395 Guntram Rümmele: 99008 Das SIR - Modell Die Modellierung von epidemischen Modellen hat schon lange Tradition. Man hat schon immer versucht Erklärungen für
Ein Einfaches AIDS Modell Martin Bauer: 990395 Guntram Rümmele: 99008 Das SIR - Modell Die Modellierung von epidemischen Modellen hat schon lange Tradition. Man hat schon immer versucht Erklärungen für
1 Informationelle Systeme begriffliche Abgrenzung
 1 Informationelle Systeme begriffliche Abgrenzung Im Titel dieses Buches wurde das Wort Softwaresystem an den Anfang gestellt. Dies ist kein Zufall, denn es soll einen Hinweis darauf geben, dass dieser
1 Informationelle Systeme begriffliche Abgrenzung Im Titel dieses Buches wurde das Wort Softwaresystem an den Anfang gestellt. Dies ist kein Zufall, denn es soll einen Hinweis darauf geben, dass dieser
Die Gleichung A x = a hat für A 0 die eindeutig bestimmte Lösung. Für A=0 und a 0 existiert keine Lösung.
 Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Signalübertragung und -verarbeitung
 ILehrstuhl für Informationsübertragung Schriftliche Prüfung im Fach Signalübertragung und -verarbeitung 6. Oktober 008 5Aufgaben 90 Punkte Hinweise: Beachten Sie die Hinweise zu den einzelnen Teilaufgaben.
ILehrstuhl für Informationsübertragung Schriftliche Prüfung im Fach Signalübertragung und -verarbeitung 6. Oktober 008 5Aufgaben 90 Punkte Hinweise: Beachten Sie die Hinweise zu den einzelnen Teilaufgaben.
Rente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren Rentenperiode = Zeitabstand zwischen zwei Rentenzahlungen
 wiederkehren Rentenperiode = Zeitabstand zwischen zwei Rentenzahlungen") 5.2. entenrechnung Definition: ente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren entenperiode = Zeitabstand zwischen zwei entenzahlungen Finanzmathematisch sind zwei
5.2. entenrechnung Definition: ente = laufende Zahlungen, die in regelmäßigen Zeitabschnitten (periodisch) wiederkehren entenperiode = Zeitabstand zwischen zwei entenzahlungen Finanzmathematisch sind zwei
Bevor lineare Gleichungen gelöst werden, ein paar wichtige Begriffe, die im Zusammenhang von linearen Gleichungen oft auftauchen.
 R. Brinkmann http://brinkmann-du.de Seite 1 13.0.010 Lineare Gleichungen Werden zwei Terme durch ein Gleichheitszeichen miteinander verbunden, so entsteht eine Gleichung. Enthält die Gleichung die Variable
R. Brinkmann http://brinkmann-du.de Seite 1 13.0.010 Lineare Gleichungen Werden zwei Terme durch ein Gleichheitszeichen miteinander verbunden, so entsteht eine Gleichung. Enthält die Gleichung die Variable
Bildrekonstruktion & Multiresolution
 Bildrekonstruktion & Multiresolution Verkleinern von Bildern? Was ist zu beachten? Es kann aliasing auftreten! Das Abtasttheorem sagt wie man es vermeidet? ===> Page 1 Verkleinern von Bildern (2) Vor dem
Bildrekonstruktion & Multiresolution Verkleinern von Bildern? Was ist zu beachten? Es kann aliasing auftreten! Das Abtasttheorem sagt wie man es vermeidet? ===> Page 1 Verkleinern von Bildern (2) Vor dem
Optimierung und Simulation ökonomischer Problemlagen privater Haushalte 3. Vorlesung
 Optimierung und Simulation ökonomischer Problemlagen privater Haushalte 3. Vorlesung Rainer Hufnagel / Laura Wahrig 2006 Diese Woche LO - Sensitivitätsanalyse Simulation Beispiel Differenzengleichungen
Optimierung und Simulation ökonomischer Problemlagen privater Haushalte 3. Vorlesung Rainer Hufnagel / Laura Wahrig 2006 Diese Woche LO - Sensitivitätsanalyse Simulation Beispiel Differenzengleichungen
Kommunikation als kreativer Prozess: Im Dialog mit dem Kunden
 VOM MARKETING ZUR AKQUISITON Kommunikation als kreativer Prozess: Im Dialog mit dem Kunden Riklef Rambow Die Kommunikation mit dem Bauherren [1] ist ein wesentlicher Teil des Entwurfsprozesses in der Architektur.
VOM MARKETING ZUR AKQUISITON Kommunikation als kreativer Prozess: Im Dialog mit dem Kunden Riklef Rambow Die Kommunikation mit dem Bauherren [1] ist ein wesentlicher Teil des Entwurfsprozesses in der Architektur.
Kybernetik Laplace Transformation
 Kybernetik Laplace Transformation Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 50 2453 mohamed.oubbati@uni-ulm.de 08. 05. 202 Laplace Transformation Was ist eine Transformation? Was ist
Kybernetik Laplace Transformation Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 50 2453 mohamed.oubbati@uni-ulm.de 08. 05. 202 Laplace Transformation Was ist eine Transformation? Was ist
Informationsblatt Induktionsbeweis
 Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Einführung in. Logische Schaltungen
 Einführung in Logische Schaltungen 1/7 Inhaltsverzeichnis 1. Einführung 1. Was sind logische Schaltungen 2. Grundlegende Elemente 3. Weitere Elemente 4. Beispiel einer logischen Schaltung 2. Notation von
Einführung in Logische Schaltungen 1/7 Inhaltsverzeichnis 1. Einführung 1. Was sind logische Schaltungen 2. Grundlegende Elemente 3. Weitere Elemente 4. Beispiel einer logischen Schaltung 2. Notation von
Charakteristikenmethode im Beispiel
 Charakteristikenmethode im Wir betrachten die PDE in drei Variablen xu x + yu y + (x + y )u z = 0. Das charakteristische System lautet dann ẋ = x ẏ = y ż = x + y und besitzt die allgemeine Lösung x(t)
Charakteristikenmethode im Wir betrachten die PDE in drei Variablen xu x + yu y + (x + y )u z = 0. Das charakteristische System lautet dann ẋ = x ẏ = y ż = x + y und besitzt die allgemeine Lösung x(t)
Einführung in die Algebra
 Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 13 Einheiten Definition 13.1. Ein Element u in einem Ring R heißt Einheit, wenn es ein Element v R gibt mit uv = vu = 1. DasElementv
Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 13 Einheiten Definition 13.1. Ein Element u in einem Ring R heißt Einheit, wenn es ein Element v R gibt mit uv = vu = 1. DasElementv
A2.3: Sinusförmige Kennlinie
 A2.3: Sinusförmige Kennlinie Wie betrachten ein System mit Eingang x(t) und Ausgang y(t). Zur einfacheren Darstellung werden die Signale als dimensionslos betrachtet. Der Zusammenhang zwischen dem Eingangssignal
A2.3: Sinusförmige Kennlinie Wie betrachten ein System mit Eingang x(t) und Ausgang y(t). Zur einfacheren Darstellung werden die Signale als dimensionslos betrachtet. Der Zusammenhang zwischen dem Eingangssignal
Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand
 Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand Vorüberlegung In einem seriellen Stromkreis addieren sich die Teilspannungen zur Gesamtspannung Bei einer Gesamtspannung U ges, der
Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand Vorüberlegung In einem seriellen Stromkreis addieren sich die Teilspannungen zur Gesamtspannung Bei einer Gesamtspannung U ges, der
RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors
 RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors Quelle: http://de.wikipedia.org/w/index.php?title=datei:radialventilator- Wellringrad.jpg&filetimestamp=20061128101719 (Stand: 26.09.2012) Martin
RT-E: Entwurf der Drehzahlregelung eines Gebläsemotors Quelle: http://de.wikipedia.org/w/index.php?title=datei:radialventilator- Wellringrad.jpg&filetimestamp=20061128101719 (Stand: 26.09.2012) Martin
DSO. Abtastrate und Speichertiefe
 DSO Abtastrate und Speichertiefe Inhalt Inhalt...- 1 - Feine Signaldetails und lange Abtastzeiträume...- 2 - Was ein großer Speicher bewirkt...- 2 - Einfluss der Oszilloskop-Architektur auf die Update-Rate...-
DSO Abtastrate und Speichertiefe Inhalt Inhalt...- 1 - Feine Signaldetails und lange Abtastzeiträume...- 2 - Was ein großer Speicher bewirkt...- 2 - Einfluss der Oszilloskop-Architektur auf die Update-Rate...-
9 Multiplexer und Code-Umsetzer
 9 9 Multiplexer und Code-Umsetzer In diesem Kapitel werden zwei Standard-Bauelemente, nämlich Multiplexer und Code- Umsetzer, vorgestellt. Diese Bausteine sind für eine Reihe von Anwendungen, wie zum Beispiel
9 9 Multiplexer und Code-Umsetzer In diesem Kapitel werden zwei Standard-Bauelemente, nämlich Multiplexer und Code- Umsetzer, vorgestellt. Diese Bausteine sind für eine Reihe von Anwendungen, wie zum Beispiel
Prüfungsdauer in Min.
 Fachprüfungen des Eignungsfeststellungsverfahrens für Master Elektrotechnik Geprüft werden Kenntnisse aus vier Fachgebieten. Die Prüfungen erfolgen in deutscher Sprache und an vier Terminen innerhalb einer
Fachprüfungen des Eignungsfeststellungsverfahrens für Master Elektrotechnik Geprüft werden Kenntnisse aus vier Fachgebieten. Die Prüfungen erfolgen in deutscher Sprache und an vier Terminen innerhalb einer
Mathematische Maschinen
 Mathematische Maschinen Ziel: Entwicklung eines allgemeinen Schemas zur Beschreibung von (mathematischen) Maschinen zur Ausführung von Algorithmen (hier: (partiellen) Berechnungsverfahren). Mathematische
Mathematische Maschinen Ziel: Entwicklung eines allgemeinen Schemas zur Beschreibung von (mathematischen) Maschinen zur Ausführung von Algorithmen (hier: (partiellen) Berechnungsverfahren). Mathematische
Vorlesung Diskrete Strukturen Graphen: Wieviele Bäume?
 Vorlesung Diskrete Strukturen Graphen: Wieviele Bäume? Bernhard Ganter Institut für Algebra TU Dresden D-01062 Dresden bernhard.ganter@tu-dresden.de WS 2013/14 Isomorphie Zwei Graphen (V 1, E 1 ) und (V
Vorlesung Diskrete Strukturen Graphen: Wieviele Bäume? Bernhard Ganter Institut für Algebra TU Dresden D-01062 Dresden bernhard.ganter@tu-dresden.de WS 2013/14 Isomorphie Zwei Graphen (V 1, E 1 ) und (V
Empfehlung für den Neubau/die Sanierung eines Einfamilienhauses
 Empfehlung für den Neubau/die Sanierung eines Einfamilienhauses Die folgende Aufstellung dient tohuus.media - Kunden der Stadtwerke Geesthacht GmbH oder Unternehmen, die im Rahmen der Innenhausverkabelung
Empfehlung für den Neubau/die Sanierung eines Einfamilienhauses Die folgende Aufstellung dient tohuus.media - Kunden der Stadtwerke Geesthacht GmbH oder Unternehmen, die im Rahmen der Innenhausverkabelung
Definition:Eine meromorphe Modulform vom Gewicht k Z ist eine meromorphe. f : H C. (ii) C > 0, so daß f(z) im Bereich Im z > C keine Singularität hat.
 C > 0, so daß f(z) im Bereich Im z > C keine Singularität hat.") Die k/2 - Formel von Renate Vistorin Zentrales Thema dieses Vortrages ist die k/2 - Formel für meromorphe Modulformen als eine Konsequenz des Residuensatzes. Als Folgerungen werden danach einige Eigenschaften
Die k/2 - Formel von Renate Vistorin Zentrales Thema dieses Vortrages ist die k/2 - Formel für meromorphe Modulformen als eine Konsequenz des Residuensatzes. Als Folgerungen werden danach einige Eigenschaften
R. Brinkmann http://brinkmann-du.de Seite 1 30.11.2013 Schriftliche Übung Mathematik Stochastik II (Nachschreiber) Jan. 2007
 Jan. 2007") R. Brinkmann http://brinkmann-du.de Seite 1 30.11.2013 Schriftliche Übung Mathematik Stochastik II (Nachschreiber) Jan. 2007 SG15/25D NAME: Lösungen 1. In einer Packung sind Glühbirnen, davon sind zwei
R. Brinkmann http://brinkmann-du.de Seite 1 30.11.2013 Schriftliche Übung Mathematik Stochastik II (Nachschreiber) Jan. 2007 SG15/25D NAME: Lösungen 1. In einer Packung sind Glühbirnen, davon sind zwei
3 TECHNISCHER HINTERGRUND
 Techniken und Voraussetzungen 3 TECHNISCHER HINTERGRUND 3.1 Was bedeutet Feldbus-Technik? Die Feldbus-Technik wird zur Datenübertragung zwischen Sensoren / Aktoren und Automatisierungsgeräten, z.b. Speicher-Programmierbaren-
Techniken und Voraussetzungen 3 TECHNISCHER HINTERGRUND 3.1 Was bedeutet Feldbus-Technik? Die Feldbus-Technik wird zur Datenübertragung zwischen Sensoren / Aktoren und Automatisierungsgeräten, z.b. Speicher-Programmierbaren-
Amateurfunkkurs. Erstellt: 2010-2011. Landesverband Wien im ÖVSV. Digitale Signalverarbeitung. R. Schwarz OE1RSA. Übersicht. Definition.
 Amateurfunkkurs Landesverband Wien im ÖVSV Erstellt: 2010-2011 Letzte Bearbeitung: 17. September 2012 Themen 1 2 3 4 Analog - Digital Analog-Digital Kontinuierlich-Binär Analog: Kontinuierliche Erfassung
Amateurfunkkurs Landesverband Wien im ÖVSV Erstellt: 2010-2011 Letzte Bearbeitung: 17. September 2012 Themen 1 2 3 4 Analog - Digital Analog-Digital Kontinuierlich-Binär Analog: Kontinuierliche Erfassung
Woraus besteht ein Bild? 28.02.2008 (c) Winfried Heinkele 2006 2
 Winfried Heinkele 2006 2") Woraus besteht ein Bild? 28.02.2008 (c) Winfried Heinkele 2006 2 Was ist ein Pixel? Die durch das Objektiv einer Kamera auf einen Film oder einen elektronischen Bildsensor projizierte Wirklichkeit ist
Woraus besteht ein Bild? 28.02.2008 (c) Winfried Heinkele 2006 2 Was ist ein Pixel? Die durch das Objektiv einer Kamera auf einen Film oder einen elektronischen Bildsensor projizierte Wirklichkeit ist
Zusammenfassung der 8. Vorlesung
 Zusammenfassung der 8. Vorlesung Beschreibung und und Analyse dynamischer Systeme im im Zustandsraum Steuerbarkeit eines dynamischen Systems Unterscheidung: Zustandssteuerbarkeit, Zustandserreichbarkeit
Zusammenfassung der 8. Vorlesung Beschreibung und und Analyse dynamischer Systeme im im Zustandsraum Steuerbarkeit eines dynamischen Systems Unterscheidung: Zustandssteuerbarkeit, Zustandserreichbarkeit
Abiturprüfung Mathematik 2008 (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe 1
 Berufliche Gymnasien ohne TG Analysis, Aufgabe 1") Abiturprüfung Mathematik (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe Für jedes t f t () + t R ist die Funktion f t gegeben durch = mit R. Das Schaubild von f t heißt K t.. (6 Punkte)
Abiturprüfung Mathematik (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe Für jedes t f t () + t R ist die Funktion f t gegeben durch = mit R. Das Schaubild von f t heißt K t.. (6 Punkte)
Einführung in die Robotik Analog-Digital und Digital-Analog Wandler
 Einführung in die Robotik Analog-Digital und Digital-Analog Wandler Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 5 2453 mohamed.oubbati@uni-ulm.de 3.. 22 Analog-Digital (A/D) Wandler Digital
Einführung in die Robotik Analog-Digital und Digital-Analog Wandler Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 73 / 5 2453 mohamed.oubbati@uni-ulm.de 3.. 22 Analog-Digital (A/D) Wandler Digital
Professionelle Seminare im Bereich MS-Office
 Gegenüber PowerPoint 2003 hat sich in PowerPoint 2007 gerade im Bereich der Master einiges geändert. Auf Handzettelmaster und Notizenmaster gehe ich in diesen Ausführungen nicht ein, die sind recht einfach
Gegenüber PowerPoint 2003 hat sich in PowerPoint 2007 gerade im Bereich der Master einiges geändert. Auf Handzettelmaster und Notizenmaster gehe ich in diesen Ausführungen nicht ein, die sind recht einfach
Investition und Finanzierung. Investition Teil 1
 Fernstudium Guide Online Vorlesung Wirtschaftswissenschaft Investition und Finanzierung Investition Teil 1 Dieses Werk ist urheberrechtlich geschützt. Jegliche unzulässige Form der Entnahme, des Nachdrucks,
Fernstudium Guide Online Vorlesung Wirtschaftswissenschaft Investition und Finanzierung Investition Teil 1 Dieses Werk ist urheberrechtlich geschützt. Jegliche unzulässige Form der Entnahme, des Nachdrucks,
50. Mathematik-Olympiade 2. Stufe (Regionalrunde) Klasse 11 13. 501322 Lösung 10 Punkte
 Klasse 11 13. 501322 Lösung 10 Punkte") 50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
Definition und Begriffe
 Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Funktionaler Zusammenhang. Lehrplan Realschule
 Funktionaler Bildungsstandards Lehrplan Realschule Die Schülerinnen und Schüler nutzen Funktionen als Mittel zur Beschreibung quantitativer Zusammenhänge, erkennen und beschreiben funktionale Zusammenhänge
Funktionaler Bildungsstandards Lehrplan Realschule Die Schülerinnen und Schüler nutzen Funktionen als Mittel zur Beschreibung quantitativer Zusammenhänge, erkennen und beschreiben funktionale Zusammenhänge
(λ Ri I A+BR)v Ri = 0. Lässt sich umstellen zu
v Ri = 0. Lässt sich umstellen zu") Herleitung der oppenecker-formel (Wiederholung) Für ein System ẋ Ax + Bu (B habe Höchstrang) wird eine Zustandsregelung u x angesetzt. Der geschlossene egelkreis gehorcht der Zustands-Dgl. ẋ (A B)x. Die
Herleitung der oppenecker-formel (Wiederholung) Für ein System ẋ Ax + Bu (B habe Höchstrang) wird eine Zustandsregelung u x angesetzt. Der geschlossene egelkreis gehorcht der Zustands-Dgl. ẋ (A B)x. Die
Mathematischer Vorbereitungskurs für Ökonomen
 Mathematischer Vorbereitungskurs für Ökonomen Dr. Thomas Zehrt Wirtschaftswissenschaftliches Zentrum Universität Basel Gleichungen Inhalt: 1. Grundlegendes 2. Lineare Gleichungen 3. Gleichungen mit Brüchen
Mathematischer Vorbereitungskurs für Ökonomen Dr. Thomas Zehrt Wirtschaftswissenschaftliches Zentrum Universität Basel Gleichungen Inhalt: 1. Grundlegendes 2. Lineare Gleichungen 3. Gleichungen mit Brüchen
MatheBasics Teil 4 Grundlagen der Mathematik
 Fernstudium Guide Online Vorlesung Wirtschaftswissenschaft MatheBasics Teil 4 Grundlagen der Mathematik Version vom 02.11.2015 Dieses Werk ist urheberrechtlich geschützt. Jegliche unzulässige Form der
Fernstudium Guide Online Vorlesung Wirtschaftswissenschaft MatheBasics Teil 4 Grundlagen der Mathematik Version vom 02.11.2015 Dieses Werk ist urheberrechtlich geschützt. Jegliche unzulässige Form der
Black Box erklärt. Subnetzmasken
 Black Box erklärt Subnetzmasken Die Subnetzmaske/Netzwerkmaske Die Subnetzmaske (auch Netzwerkmaske genannt) ist eine mehrstellige Binärzahl (Bitmaske), die in einem Netzwerk eine IP-Adresse in eine Netzadresse
Black Box erklärt Subnetzmasken Die Subnetzmaske/Netzwerkmaske Die Subnetzmaske (auch Netzwerkmaske genannt) ist eine mehrstellige Binärzahl (Bitmaske), die in einem Netzwerk eine IP-Adresse in eine Netzadresse
1.3.2 Resonanzkreise R L C. u C. u R. u L u. R 20 lg 1 , (1.81) die Grenzkreisfrequenz ist 1 RR C . (1.82)
 die Grenzkreisfrequenz ist 1 RR C . (1.82)") 3 Schaltungen mit frequenzselektiven Eigenschaften 35 a lg (8) a die Grenzkreisfrequenz ist Grenz a a (8) 3 esonanzkreise 3 eihenresonanzkreis i u u u u Bild 4 eihenresonanzkreis Die Schaltung nach Bild
3 Schaltungen mit frequenzselektiven Eigenschaften 35 a lg (8) a die Grenzkreisfrequenz ist Grenz a a (8) 3 esonanzkreise 3 eihenresonanzkreis i u u u u Bild 4 eihenresonanzkreis Die Schaltung nach Bild
1. Wie viel Zinsen bekommt man, wenn man 7000,00 1 Jahr lang mit 6 % anlegt?
 Zinsrechnung mit der Tabellenform: Berechnen der Jahreszinsen Ein Sparbuch mit 1600 wird mit 4% verzinst. Wie Zinsen erhält man im Jahr? Geg.: K = 1600 p% = 4% ges.: Z Das Kapital (Grundwert) entspricht
Zinsrechnung mit der Tabellenform: Berechnen der Jahreszinsen Ein Sparbuch mit 1600 wird mit 4% verzinst. Wie Zinsen erhält man im Jahr? Geg.: K = 1600 p% = 4% ges.: Z Das Kapital (Grundwert) entspricht
Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. z(t) = at + b
 = at + b") Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Qualitätsmanagementsystem der IHK Köln. Überblick 2015
 Qualitätsmanagementsystem der IHK Köln Überblick 2015 Aktivitäten zur Weiterentwicklung des QM-Systems /1 Nach dem bestandenen Zertifizierungsaudit (November 2014) hat die Dynamik im QM-System nicht nachgelassen.
Qualitätsmanagementsystem der IHK Köln Überblick 2015 Aktivitäten zur Weiterentwicklung des QM-Systems /1 Nach dem bestandenen Zertifizierungsaudit (November 2014) hat die Dynamik im QM-System nicht nachgelassen.
Einführung in die Informatik I
 Einführung in die Informatik I Algorithmen und deren Programmierung Prof. Dr. Nikolaus Wulff Definition Algorithmus Ein Algorithmus ist eine präzise formulierte Handlungsanweisung zur Lösung einer gleichartigen
Einführung in die Informatik I Algorithmen und deren Programmierung Prof. Dr. Nikolaus Wulff Definition Algorithmus Ein Algorithmus ist eine präzise formulierte Handlungsanweisung zur Lösung einer gleichartigen
Kapitel 4 Schaltungen mit Delays (Schaltwerke) Literatur: Oberschelp/Vossen, Kapitel 4. Kapitel 4: Schaltungen mit Delays Seite 1
 Literatur: Oberschelp/Vossen, Kapitel 4. Kapitel 4: Schaltungen mit Delays Seite 1") Kapitel 4 Schaltungen mit Delays (Schaltwerke) Literatur: Oberschelp/Vossen, Kapitel 4 Kapitel 4: Schaltungen mit Delays Seite 1 Schaltungen mit Delays Inhaltsverzeichnis 4.1 Einführung 4.2 Addierwerke
Kapitel 4 Schaltungen mit Delays (Schaltwerke) Literatur: Oberschelp/Vossen, Kapitel 4 Kapitel 4: Schaltungen mit Delays Seite 1 Schaltungen mit Delays Inhaltsverzeichnis 4.1 Einführung 4.2 Addierwerke
Lineare Algebra und Lösung linearer zeitinvarianter Differentialgleichungssysteme
 Übung Lineare Algebra und Lösung linearer zeitinvarianter Differentialgleichungssysteme Diese Übung beschäftigt sich mit Grundbegriffen der linearen Algebra. Im Speziellen werden lineare Abbildungen, sowie
Übung Lineare Algebra und Lösung linearer zeitinvarianter Differentialgleichungssysteme Diese Übung beschäftigt sich mit Grundbegriffen der linearen Algebra. Im Speziellen werden lineare Abbildungen, sowie
Software-Engineering SS03. Zustandsautomat
 Zustandsautomat Definition: Ein endlicher Automat oder Zustandsautomat besteht aus einer endlichen Zahl von internen Konfigurationen - Zustände genannt. Der Zustand eines Systems beinhaltet implizit die
Zustandsautomat Definition: Ein endlicher Automat oder Zustandsautomat besteht aus einer endlichen Zahl von internen Konfigurationen - Zustände genannt. Der Zustand eines Systems beinhaltet implizit die
1 Einführung. 1.1 Analog - Digital Unterscheidung
 1 Einführung Was ist eigentlich Digitaltechnik? Wird der Begriff Digitaltechnik getrennt, so ergeben sich die Worte DIGITAL und TECHNIK. Digital kommt von digitus (lat. der Finger) und deutet darauf hin,
1 Einführung Was ist eigentlich Digitaltechnik? Wird der Begriff Digitaltechnik getrennt, so ergeben sich die Worte DIGITAL und TECHNIK. Digital kommt von digitus (lat. der Finger) und deutet darauf hin,
C.M.I. Control and Monitoring Interface. Zusatzanleitung: Datentransfer mit CAN over Ethernet (COE) Version 1.08
 Version 1.08") C.M.I. Version 1.08 Control and Monitoring Interface Zusatzanleitung: Datentransfer mit CAN over Ethernet (COE) de LAN LAN Beschreibung der Datentransfermethode Mit dieser Methode ist es möglich, analoge
C.M.I. Version 1.08 Control and Monitoring Interface Zusatzanleitung: Datentransfer mit CAN over Ethernet (COE) de LAN LAN Beschreibung der Datentransfermethode Mit dieser Methode ist es möglich, analoge
Risiken der gesamtwirtschaftlichen Entwicklung
 1 Risiken der gesamtwirtschaftlichen Entwicklung Im Rahmen der regelmäßigen Konjunkturumfrage wurden von den Industrie- und Handelskammern in Niedersachsen seit Herbst 2010 Fragen zu den Risiken der wirtschaftlichen
1 Risiken der gesamtwirtschaftlichen Entwicklung Im Rahmen der regelmäßigen Konjunkturumfrage wurden von den Industrie- und Handelskammern in Niedersachsen seit Herbst 2010 Fragen zu den Risiken der wirtschaftlichen
Musterlösungen zur Linearen Algebra II Blatt 5
 Musterlösungen zur Linearen Algebra II Blatt 5 Aufgabe. Man betrachte die Matrix A := über dem Körper R und über dem Körper F und bestimme jeweils die Jordan- Normalform. Beweis. Das charakteristische
Musterlösungen zur Linearen Algebra II Blatt 5 Aufgabe. Man betrachte die Matrix A := über dem Körper R und über dem Körper F und bestimme jeweils die Jordan- Normalform. Beweis. Das charakteristische
QM: Prüfen -1- KN16.08.2010
 QM: Prüfen -1- KN16.08.2010 2.4 Prüfen 2.4.1 Begriffe, Definitionen Ein wesentlicher Bestandteil der Qualitätssicherung ist das Prüfen. Sie wird aber nicht wie früher nach der Fertigung durch einen Prüfer,
QM: Prüfen -1- KN16.08.2010 2.4 Prüfen 2.4.1 Begriffe, Definitionen Ein wesentlicher Bestandteil der Qualitätssicherung ist das Prüfen. Sie wird aber nicht wie früher nach der Fertigung durch einen Prüfer,
Aufbau eines Digitalzählers
 INTITUT FÜ NGWNDT PHYIK Physikalisches Praktikum für tudierende der Ingenieurswissenschaften Universität Hamburg, Jungiusstraße ufbau eines Digitalzählers inleitung Jede beliebige Information kann zerlegt
INTITUT FÜ NGWNDT PHYIK Physikalisches Praktikum für tudierende der Ingenieurswissenschaften Universität Hamburg, Jungiusstraße ufbau eines Digitalzählers inleitung Jede beliebige Information kann zerlegt
Seminar Digitale Signalverarbeitung
 Universität Koblenz-Landau Institut für integrierte aturwissenschaften Abteilung Physik Dr. Merten Joost Seminar Digitale Signalverarbeitung Thema: Fast Fourier Transformation Praktische Durchführung einer
Universität Koblenz-Landau Institut für integrierte aturwissenschaften Abteilung Physik Dr. Merten Joost Seminar Digitale Signalverarbeitung Thema: Fast Fourier Transformation Praktische Durchführung einer
Messung der Ausgangsspannung an einem FU
 Messung der Ausgangsspannung an einem FU Referent: Werner Käsmann Fluke Deutschland GmbH w.kaesmann@fluke.com D 79286 Glottertal Leider gibt es heute noch Motoren, welche ohne Drehzahlregelung betrieben
Messung der Ausgangsspannung an einem FU Referent: Werner Käsmann Fluke Deutschland GmbH w.kaesmann@fluke.com D 79286 Glottertal Leider gibt es heute noch Motoren, welche ohne Drehzahlregelung betrieben
Bruttoreaktionen sagen nichts darüber aus, wie der Umsatz tatsächlich abläuft.
 7. Chemische Stoffumwandlungen 7.1 Massenbilanz bei chemischen Stoffumwandlungen Bruttoreaktionen, z. B. die Knallgasreaktion H 2 + ½ O 2 = H 2 O, beschreiben die Mengenverhätnisse beim Umsatz H 2 zu O
7. Chemische Stoffumwandlungen 7.1 Massenbilanz bei chemischen Stoffumwandlungen Bruttoreaktionen, z. B. die Knallgasreaktion H 2 + ½ O 2 = H 2 O, beschreiben die Mengenverhätnisse beim Umsatz H 2 zu O
Erstes Nyquistkriterium im Zeitbereich
 Erstes Nyquistkriterium im Zeitbereich Für dieses Kapitel wurde vorausgesetzt, dass die Detektion eines Symbols nicht durch Nachbarimpulse beeinträchtigt werden soll. Dies erreicht man durch die Detektion
Erstes Nyquistkriterium im Zeitbereich Für dieses Kapitel wurde vorausgesetzt, dass die Detektion eines Symbols nicht durch Nachbarimpulse beeinträchtigt werden soll. Dies erreicht man durch die Detektion