2.1.8 Mohrscher Spannungskreis
|
|
|
- Reinhardt Solberg
- vor 6 Jahren
- Abrufe
Transkript
1 ..8 Mohrscher pannungskreis (Mohr 88) Drehung des Koordinatensystems (D): íj τ τ cosθ sinθ sinθ cosθ τ τ cosθ sinθ sinθ cosθ Ergebnis (allgemein): τ τ ( x - x ) Gleichung der Form y r alle äquivalenten Kombinationen aus chubspannungen liegen auf einem Kreis im τ Koordinatensystem Normal - und
2 Konstruktion des Mohrschen pannungskreises (D): τ τ max τ θ τ
3 Mohrscher pannungskreis im Dreidimensionalen Mit Hilfe von den drei gegebenen Hauptnormalspannungen ( > > ) werden drei Mohrsche pannungskreise konstruiert, deren Radien den drei möglichen Hauptscherspannungen entsprechen: r τ r τ r τ Die Mittelpunkte der Kreise liegen auf der Hauptspannungsachse: M Beachte: M M Im Dreidimensionalen ersetzt die Konstruktion des Mohrschen pannungskreises nicht die Hauptachsentransformation!!!
4 Konstruktion der Mohrschen pannungskreise (D): τ τ τ max τ τ
5 Darstellung eines pannungsvektors s(e) mit Hilfe der Mohrschen pannungskreise: df(e) s(e) e n e ϕ Flächenelement df(e) definiert durch: ϕ Meridianwinkel ϑ Breitenkreiswinkel e ϑ und für das entsprechende Koordinatensystem ergibt sich : e e e ( ϕ, ϑ) { sinϑ cosϕ;sinϑ sinϕ;cosϑ}, ( ϕ, ϑ ) { sin ϕ ;cos ϕ ; }, ( ϕ, ϑ) { cosϑ cosϕ;cosϑ sinϕ; sinϑ} ϕ ϑ
6 τ K K ϕ s(e) K ϑ K K ϑ ϕ M M ϕ M M
7 τ K K ϕ s(e) K ϑ K K s(e) T s (s(e)) α ϑ ϕ M M ϕ M M T n (s(e))
8 . Verzerrungstensor Dehnung aber: Rotation ist auszuschließen! e du dx du dx cherung du dx e du dx θ du dx du dx
9 .. Definition Der Verzerrungstensor beschreibt den Verzerrungszustand in einem Punkt des Festkörpers vollständig. Er ist in dieser Form nur für kleine Verschiebungen definiert definiert. mit u i : i-komponente der Verschiebung i j j i ij x u x u i x j x u u u u u ij u u u u u x x x x x ij u u u u u x x x x x Dehnungen :,, x x x x x Dehnungen :,, cherungen :,,,



10 .. Besondere Verzerrungszustände ebene Dehnung reine cherung Dilatation Technische cherung cherkomponente (kein Tensor!)
11 .. Eigenschaften des Verzerrungstensors ) symmetrisch: ij ji 6 Komponenten ) zerlegbar: ij m m m m Dilatator m Deviator m wobei ( ) Dilatation (relative Volumenänderung): m Δ ΔV V
12 ) Deviator ist timmer zerlegbar in 5 reine cherungen Folge: Für beliebige Verformung sind 5 unabhängige Gleitsysteme nötig.
13 4) Ermittlung der Hauptdehnungen analog Ermittlung der Hauptspannungen, d.h. Lösung des Eigenwertproblems. det ij λ E Die Wurzeln λ i des Polynoms entsprechen den drei Hauptdehnungen,, und. Im elastisch isotropen Feskörper fallen die Hauptspannungs- und die Hauptdehnungsachsen zusammen!
14 . Allgemeines Hookesches Gesetz.. Tensorschreibweise des Allgemeinen Hookeschen Gesetzes Das Allgemeine Hookesche Gesetz beschreibt den allgemeinsten linearen Zusammenhang zwischen pannung (pannungstensor) ) und Verzerrung (Verzerrungstensor): ij ijkl kl ij ijkl kl ij : pannungstensor (Tensor. tufe) kl : Verzerrungstensor (Tensor. tufe) ijkl : teifigkeitstensor (Tensor 4. tufe) (auch: Elastizitätstensor) ijkl : Nachgiebigkeitstensor (Tensor 4. tufe)
15 Vollständige Darstellung in Komponentenschreibweise: (9x9 Hypermatrix mi 8 Komponenten) (9 9 ype at 8 o po e te )
16 pannungstensor und Verzerrungstensor sind symmetrisch. Deshalb gilt für die p g g y g Komponenten des teifigkeitstensors und des Nachgiebigkeitstensors jilk ijlk jikl ijkl bzw. jilk ijlk jikl ijkl jilk ijlk jikl ijkl
17 Die Tensormultiplikation führt zu neun linearen Gleichungen der folgenden Form: usw. Unter Berücksichtigung der ymmetriebedingungen ergibt sich für die sechs unabhängigen Komponenten des pannungstensors: ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
18 .. Kontrahierte Notation nach Voigt ( Voigtsche Vereinfachung ) Der pannungstensor lässt sich durch einen sechskomponentigen Vektor repräsentieren (dabei geht keine Information verloren)
19 In ähnlicher Weise wird ein sechskomponentiger Verzerrungsvektor definiert: 4 5 6
20 Das Allgemeine Hookesche Gesetz erhält mit der Voigtschen Notation folgende Form: bzw
21 Durch Koeffizientenvergleich erkennt man,,, 4 usw. Die Voigtsche teifigkeitsmatrix ij enthält die gleiche Information über die elastischen Eigenschaften des Festkörpers wie der teifigkeitstensor. Die teifigkeitsmatrix besitzt jedoch keine Tensoreigenschaften. Die teifigkeitsmatrix enthält 6 Komponenten. Auch die teifigkeitsmatrix it t i ist symmetrisch, d.h. es gilt: ij ji. Dadurch vermindert sich die Anzahl der unabhängigen Komponenten der Matrix auf. Im allgemeinsten Fall werden zur Beschreibung des linear-elastischen Verhaltens eines Festkörpers elastische Konstanten benötigt.
22 Aufgrund der Kristallsymmetrie des Festkörpers wird die Anzahl der unabhängigen Konstanten reduziert. triklin monoklin orthorhombisch 9 tetragonal 6 hexagonal 5 kubisch isotrop
23
24 .. Elastische Konstanten bei kubischer ymmetrie Bei kubischer ymmetrie gilt: Die restlichen Komponenten der teifigkeitsmatrix sind alle gleich null. ij kub
25 Beziehungen zwischen ij und ij :, ( )( ) ( )( ) ( )( ) ( )( ) 44, 44 44, 44
26 Das linear-elastische Verhalten eines kubischen Kristalls lässt sich somit durch die Angabe von drei unabhängigen Konstanten (z.b., und 44 ) vollständig beschreiben. Ein Maß für die Anisotropie eines kubischen Kristalls ist der Anisotropiefaktor A, der wie folgt definiert ist: A ( ( ) Je weiter A vom Wert abweicht, umso ausgeprägter ist die Anisotropie des Kristalls.
27 /A


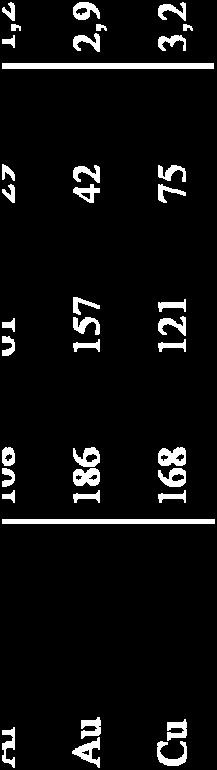








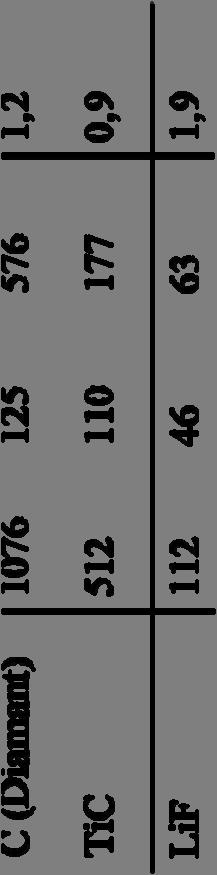



28 Elastische Konstanten und Anisotropiefaktoren verschiedener kubischer Kristalle Zahlenwerte in GPa (ermittelt an Einkristallen) α A E /E
29 Bestimmung des E-Moduls in eine beliebige Richtung d: Einachsiger Zug in Richtung d: d Transformation in Kristallachsen pannungszustand us in Kristallachsen: se 6 Hookesches Gesetz: i ij j Dehnungszustand in Kristallachsen: 6 Rücktransformation Dehnung in Richtung d: d E-Modul lin Richtung d: Ε d d / d
30 Anisotropie des E-Moduls: [ ( ) ] ( ) 44 α β α γ β γ E hkl cos( [ hkl ], [ ] ), β cos( [ hkl],[ ] ), cos( [ hkl],[ ] ) mit α γ tandardorientierungsdreieck Beispiel Ni-basis-uperlegierung (PWA 48)
31 tereographische Projektion P Pol, chnittpunkt der Flächennormale mit der Polkugel/Referenzkugel E Einkristall


32 tandardprojektion


33
![Anisotropie des E-Moduls: [ ( ) ] ( ) 44 α β α γ β γ E hkl cos( [ hkl ], [ ] ), β cos( [ hkl],[ ]](/docs-images/70/62572535/images/34-7.jpg "), cos( [ hkl],[ ] ) mit α γ tandardorientierungsdreieck Beispiel Ni-basis-uperlegierung (PWA 48)")
34 Anisotropie des E-Moduls: [ ( ) ] ( ) 44 α β α γ β γ E hkl cos( [ hkl ], [ ] ), β cos( [ hkl],[ ] ), cos( [ hkl],[ ] ) mit α γ tandardorientierungsdreieck Beispiel Ni-basis-uperlegierung (PWA 48)
35 ..4 Elastische Konstanten bei hexagonaler ymmetrie Bei hexagonaler ymmetrie gilt:, 44 55, 66 ( ) Die restlichen Komponenten der teifigkeitsmatrix sind alle gleich null. ij hex
36 ..5 Elastische Konstanten bei Isotropie Bei isotropem elastischen Verhalten sind die drei Konstanten, und 44 nicht mehr unabhängig voneinander. 44 Es gilt: ( ) A Die drei Konstanten hängen unmittelbar mit dem Elastizitätsmodul E und der Poissonzahl ν zusammen: E( ν ) E ( ν )( ν ) ν ( ν ) 44 Eν ν ν ( )( ) E ( ν ) G
37 E ( ν ) E ( ν )( ν ) ν ( ν ) E ν ν ν ( )( ) E 44 G ν ( ) Die Konstante ist identisch mit dem bereits in Kap. hergeleiteten Modul für einachsige Dehnung. Die Konstante 44 entspricht dem chermodul G. Anmerkung: Polykristalline texturfreie Materialien weisen unabhängig von ihrer Kristallstruktur in der Regel ein isotropes elastisches Verhalten auf, dieses Verhalten nennt man Quasi-Isotropie.
38 ..6 Quasi-Isotropie von Polykristallen Das elastische Verhalten von Polykristallen ist zwar in jedem einzelnen Korn anisotrop, gemittelt über viele Körner ergibt sich jedoch ein quasi-isotropes isotropes Verhalten. Für kubische Materialien lassen sich folgende Mittelwerte für den E- Modul und den chubmodul berechnen: Voigt-Mittel (Iso-Dehnung): E ( )( ) 44 V G V 44 5 Reuss-Mittel (Iso-pannung): E R 5, G R , 5 ( ) 44 Im allgemeinen gilt: E exp < < R E E V
39 .4 Experimentelle Bestimmung von elastischen Konstanten t Für die Bestimmung der elastischen Konstanten müssen so viele voneinander unabhängige Experimente durchgeführt werden, wie es unabhängige Konstanten gibt, also z.b. 5 bei hexagonalen Kristallen, bei kubischen Kristallen und bei isotropen Festkörpern. In der Regel wird das Ultraschallverfahren angewandt, bei dem an einem kleinen Probenkörper (ca. cm³) die Fortpflanzungsgeschwindigkeiten verschiedenartig angeregter g challwellen gemessen wird
40 Versuchsaufbau Ultraschallmessung: Impulsgenerator/-verstärker (T/R) Koppelmittel Ultraschall- prüfkopf ignal Trigger Probe Oszilloskop c l p t p c challgeschwindigkeit, l p Probendicke, l p Laufzeit
41 u l x u t Man unterscheidet zwischen Longitudinalwellen (Auslenkung u parallel zur Fortpflanzungsrichtung x) und cher- bzw. Transversalwellen (Auslenkung senkrecht zur Fortpflanzungsrichtung).
42 Isotrope Materialien Im einfachsten Fall, d.h. bei einem isotropen Festkörper, genügt zur vollständigen harakterisierung die Messung der transversalen challgeschwindigkeit c T und der longitudinalen challgeschwindigkeit c L in jeweils beliebiger Raumrichtung. Ist die Dichte ρ des untersuchten Festkörpers bekannt, so lassen sich die elastischen Konstanten aus folgenden Gleichungen berechnen (gilt so nur bei Isotropie!): c L E ( ν ) ρ ρ ( ν )( ν ) G E c 44 T ρ ρ ρ ( ν )
43 Anisotrope Materialien Zur Bestimmung der elastischen Konstanten von anisotropen Kristallen müssen challgeschwindigkeitsmessungen an einkristallinen Proben in verschiedenen definierten Gitterrichtungen durchgeführt werden. Für genauere Erläuterungen zu diesem Thema wird auf einschlägige Lehrbücher verwiesen, z.b. K.-H. Hellwege, Einführung in die Festkörperphysik, pringer-verlag.
44 challwellen in kubischen Kristallen Eine challwelle ist eine elastische Welle. ie wird charakterisiert durch die Ausbreitungsrichtung (Wellenzahlvektor K mit dem Betrag π/λ) und die Polarisation (Auslenkungsrichtung u) Verschiedene Wellenformen in einem kubischen Kristall. L longitudinal, T transversal.
45
Mechanische Spannung und Elastizität
 Mechanische Spannung und Elastizität Wirken unterschiedliche Kräfte auf einen ausgedehnten Körper an unterschiedlichen Orten, dann erfährt der Körper eine mechanische Spannung. F 1 F Wir definieren die
Mechanische Spannung und Elastizität Wirken unterschiedliche Kräfte auf einen ausgedehnten Körper an unterschiedlichen Orten, dann erfährt der Körper eine mechanische Spannung. F 1 F Wir definieren die
Theoretische Physik 1, Mechanik
 Theoretische Physik 1, Mechanik Harald Friedrich, Technische Universität München Sommersemester 2009 Mathematische Ergänzungen Vektoren und Tensoren Partielle Ableitungen, Nabla-Operator Physikalische
Theoretische Physik 1, Mechanik Harald Friedrich, Technische Universität München Sommersemester 2009 Mathematische Ergänzungen Vektoren und Tensoren Partielle Ableitungen, Nabla-Operator Physikalische
WELLEN im VAKUUM. Kapitel 10. B t E = 0 E = B = 0 B. E = 1 c 2 2 E. B = 1 c 2 2 B
 Kapitel 0 WELLE im VAKUUM In den Maxwell-Gleichungen erscheint eine Asymmetrie durch Ladungen, die Quellen des E-Feldes sind und durch freie Ströme, die Ursache für das B-Feld sind. Im Vakuum ist ρ und
Kapitel 0 WELLE im VAKUUM In den Maxwell-Gleichungen erscheint eine Asymmetrie durch Ladungen, die Quellen des E-Feldes sind und durch freie Ströme, die Ursache für das B-Feld sind. Im Vakuum ist ρ und
Aus Kapitel 4 Technische Mechanik Aufgaben
 6 Aufgaben Kap. 4 Aus Kapitel 4 Aufgaben 4. Zugproben duktiler Werkstoffe reißen im Zugversuch regelmäßig mit einer größtenteils um 45 zur Kraftrichtung geneigten Bruchfläche. F F 3. Mohr scher Spannungskreis:
6 Aufgaben Kap. 4 Aus Kapitel 4 Aufgaben 4. Zugproben duktiler Werkstoffe reißen im Zugversuch regelmäßig mit einer größtenteils um 45 zur Kraftrichtung geneigten Bruchfläche. F F 3. Mohr scher Spannungskreis:
Mathematik II Frühlingsemester 2015 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren
 Mathematik II Frühlingsemester 215 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren www.math.ethz.ch/education/bachelor/lectures/fs215/other/mathematik2 biol Prof. Dr. Erich Walter Farkas http://www.math.ethz.ch/
Mathematik II Frühlingsemester 215 Kapitel 8: Lineare Algebra 8.5 Eigenwerte und Eigenvektoren www.math.ethz.ch/education/bachelor/lectures/fs215/other/mathematik2 biol Prof. Dr. Erich Walter Farkas http://www.math.ethz.ch/
2. Vorlesung Wintersemester
 2. Vorlesung Wintersemester 1 Mechanik von Punktteilchen Ein Punktteilchen ist eine Abstraktion. In der Natur gibt es zwar Elementarteilchen (Elektronen, Neutrinos, usw.), von denen bisher keine Ausdehnung
2. Vorlesung Wintersemester 1 Mechanik von Punktteilchen Ein Punktteilchen ist eine Abstraktion. In der Natur gibt es zwar Elementarteilchen (Elektronen, Neutrinos, usw.), von denen bisher keine Ausdehnung
Geometrie. 1 Vektorielle analytische Geometrie der Ebene, Kegelschnitte
 Geometrie Geometrie W. Kuhlisch Brückenkurs 206. Vektorrechnung und analytische Geometrie der Ebene, Kegelschnitte 2. Vektorrechnung und analytische Geometrie des Raumes, Anwendungen in der Geometrie,
Geometrie Geometrie W. Kuhlisch Brückenkurs 206. Vektorrechnung und analytische Geometrie der Ebene, Kegelschnitte 2. Vektorrechnung und analytische Geometrie des Raumes, Anwendungen in der Geometrie,
Inhaltsverzeichnis INHALTSVERZEICHNIS 1
 INHALTSVERZEICHNIS 1 Inhaltsverzeichnis 1 Die Parabel 2 1.1 Definition................................ 2 1.2 Bemerkung............................... 3 1.3 Tangenten................................ 3 1.4
INHALTSVERZEICHNIS 1 Inhaltsverzeichnis 1 Die Parabel 2 1.1 Definition................................ 2 1.2 Bemerkung............................... 3 1.3 Tangenten................................ 3 1.4
C orthogonal und haben die Länge 1). Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =
. Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =") 1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
ein geeignetes Koordinatensystem zu verwenden.
 1.13 Koordinatensysteme (Anwendungen) Man ist immer bemüht, für die mathematische Beschreibung einer wissenschaftlichen Aufgabe ( Chemie, Biologie,Physik ) ein geeignetes Koordinatensystem zu verwenden.
1.13 Koordinatensysteme (Anwendungen) Man ist immer bemüht, für die mathematische Beschreibung einer wissenschaftlichen Aufgabe ( Chemie, Biologie,Physik ) ein geeignetes Koordinatensystem zu verwenden.
Einführung in die Physik
 Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Übung : Vorlesung: Tutorials: Montags 13:15 bis 14 Uhr, Liebig-HS Montags 14:15 bis 15:45, Liebig HS Montags
Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Übung : Vorlesung: Tutorials: Montags 13:15 bis 14 Uhr, Liebig-HS Montags 14:15 bis 15:45, Liebig HS Montags
11. Vorlesung Wintersemester
 11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
Der Begriff der konvexen Menge ist bereits aus Definition 1.4, Teil I, bekannt.
 Kapitel 3 Konvexität 3.1 Konvexe Mengen Der Begriff der konvexen Menge ist bereits aus Definition 1.4, Teil I, bekannt. Definition 3.1 Konvexer Kegel. Eine Menge Ω R n heißt konvexer Kegel, wenn mit x
Kapitel 3 Konvexität 3.1 Konvexe Mengen Der Begriff der konvexen Menge ist bereits aus Definition 1.4, Teil I, bekannt. Definition 3.1 Konvexer Kegel. Eine Menge Ω R n heißt konvexer Kegel, wenn mit x
Kapitel VI. Euklidische Geometrie
 Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Eigenwerte und Diagonalisierung
 Eigenwerte und Diagonalisierung Wir wissen von früher: Seien V und W K-Vektorräume mit dim V = n, dim W = m und sei F : V W linear. Werden Basen A bzw. B in V bzw. W gewählt, dann hat F eine darstellende
Eigenwerte und Diagonalisierung Wir wissen von früher: Seien V und W K-Vektorräume mit dim V = n, dim W = m und sei F : V W linear. Werden Basen A bzw. B in V bzw. W gewählt, dann hat F eine darstellende
Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.2/29
 Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
1.2 Schwingungen von gekoppelten Pendeln
 0 1. Schwingungen von gekoppelten Pendeln Aufgaben In diesem Experiment werden die Schwingungen von zwei Pendeln untersucht, die durch eine Feder miteinander gekoppelt sind. Für verschiedene Kopplungsstärken
0 1. Schwingungen von gekoppelten Pendeln Aufgaben In diesem Experiment werden die Schwingungen von zwei Pendeln untersucht, die durch eine Feder miteinander gekoppelt sind. Für verschiedene Kopplungsstärken
3.6 Eigenwerte und Eigenvektoren
 3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
3.6 Eigenwerte und Eigenvektoren 3.6. Einleitung Eine quadratische n n Matrix A definiert eine Abbildung eines n dimensionalen Vektors auf einen n dimensionalen Vektor. c A x c A x Von besonderem Interesse
Korrelationsmatrix. Statistische Bindungen zwischen den N Zufallsgrößen werden durch die Korrelationsmatrix vollständig beschrieben:
 Korrelationsmatrix Bisher wurden nur statistische Bindungen zwischen zwei (skalaren) Zufallsgrößen betrachtet. Für den allgemeineren Fall einer Zufallsgröße mit N Dimensionen bietet sich zweckmäßiger Weise
Korrelationsmatrix Bisher wurden nur statistische Bindungen zwischen zwei (skalaren) Zufallsgrößen betrachtet. Für den allgemeineren Fall einer Zufallsgröße mit N Dimensionen bietet sich zweckmäßiger Weise
1 Vorlesungen: und Vektor Rechnung: 1.Teil
 1 Vorlesungen: 4.10.005 und 31.10.005 Vektor Rechnung: 1.Teil Einige in der Physik auftretende Messgrößen sind durch eine einzige Zahl bestimmt: Temperatur T K Dichte kg/m 3 Leistung P Watt = J/s = kg
1 Vorlesungen: 4.10.005 und 31.10.005 Vektor Rechnung: 1.Teil Einige in der Physik auftretende Messgrößen sind durch eine einzige Zahl bestimmt: Temperatur T K Dichte kg/m 3 Leistung P Watt = J/s = kg
Normalengleichungen. Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b,
 Normalengleichungen Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b, Normalengleichungen 1-1 Normalengleichungen Für eine beliebige
Normalengleichungen Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b, Normalengleichungen 1-1 Normalengleichungen Für eine beliebige
(x 1. Vektoren. g: x = p + r u. p r (u1. x 2. u 2. p 2
 Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
3. Erhaltungsgrößen und die Newton schen Axiome
 Übungen zur T1: Theoretische Mechanik, SoSe13 Prof. Dr. Dieter Lüst Theresienstr. 37, Zi. 45 Dr. James Gray James.Gray@physik.uni-muenchen.de 3. Erhaltungsgrößen und die Newton schen Axiome Übung 3.1:
Übungen zur T1: Theoretische Mechanik, SoSe13 Prof. Dr. Dieter Lüst Theresienstr. 37, Zi. 45 Dr. James Gray James.Gray@physik.uni-muenchen.de 3. Erhaltungsgrößen und die Newton schen Axiome Übung 3.1:
Spannungszustand
 1. Spannungszustand 1.1 Spannungsvektor und Spannungstensor 1.2 Hauptspannungen 1.3 Mohrsche Spannungskreise 1.4 Fließbedingung 1.5 Gleichgewichtsbedingungen 1.1-1 1.1 Spannungsvektor und Spannungstensor
1. Spannungszustand 1.1 Spannungsvektor und Spannungstensor 1.2 Hauptspannungen 1.3 Mohrsche Spannungskreise 1.4 Fließbedingung 1.5 Gleichgewichtsbedingungen 1.1-1 1.1 Spannungsvektor und Spannungstensor
Grundlagen der Chemie Ionenradien
 Ionenradien Prof. Annie Powell KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Ionenradien In einem Ionenkristall halten benachbarte
Ionenradien Prof. Annie Powell KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Ionenradien In einem Ionenkristall halten benachbarte
12. Vorlesung. I Mechanik
 12. Vorlesung I Mechanik 7. Schwingungen 8. Wellen transversale und longitudinale Wellen, Phasengeschwindigkeit, Dopplereffekt Superposition von Wellen 9. Schallwellen, Akustik Versuche: Wellenwanne: ebene
12. Vorlesung I Mechanik 7. Schwingungen 8. Wellen transversale und longitudinale Wellen, Phasengeschwindigkeit, Dopplereffekt Superposition von Wellen 9. Schallwellen, Akustik Versuche: Wellenwanne: ebene
κ Κα π Κ α α Κ Α
 κ Κα π Κ α α Κ Α Ζ Μ Κ κ Ε Φ π Α Γ Κ Μ Ν Ξ λ Γ Ξ Ν Μ Ν Ξ Ξ Τ κ ζ Ν Ν ψ Υ α α α Κ α π α ψ Κ α α α α α Α Κ Ε α α α α α α α Α α α α α η Ε α α α Ξ α α Γ Α Κ Κ Κ Ε λ Ε Ν Ε θ Ξ κ Ε Ν Κ Μ Ν Τ μ Υ Γ φ Ε Κ Τ θ
κ Κα π Κ α α Κ Α Ζ Μ Κ κ Ε Φ π Α Γ Κ Μ Ν Ξ λ Γ Ξ Ν Μ Ν Ξ Ξ Τ κ ζ Ν Ν ψ Υ α α α Κ α π α ψ Κ α α α α α Α Κ Ε α α α α α α α Α α α α α η Ε α α α Ξ α α Γ Α Κ Κ Κ Ε λ Ε Ν Ε θ Ξ κ Ε Ν Κ Μ Ν Τ μ Υ Γ φ Ε Κ Τ θ
Proseminar Lineare Algebra II, SS 11. Blatt
 Blatt 1 1. Berechnen Sie die Determinante der Matrix 0 0 4 1 2 5 1 7 1 2 0 3 1 3 0 α. 2. Stellen Sie folgende Matrix als Produkt von Elementarmatrizen dar: 1 3 1 4 2 5 1 3 0 4 3 1. 3 1 5 2 3. Seien n 2
Blatt 1 1. Berechnen Sie die Determinante der Matrix 0 0 4 1 2 5 1 7 1 2 0 3 1 3 0 α. 2. Stellen Sie folgende Matrix als Produkt von Elementarmatrizen dar: 1 3 1 4 2 5 1 3 0 4 3 1. 3 1 5 2 3. Seien n 2
Brewster-Winkel - Winkelabhängigkeit der Reflexion.
 5.9.30 ****** 1 Motivation Polarisiertes Licht wird an einem geschwärzten Glasrohr reflektiert, so dass auf der Hörsaalwand das Licht unter verschiedenen Relexionswinkeln auftrifft. Bei horizontaler Polarisation
5.9.30 ****** 1 Motivation Polarisiertes Licht wird an einem geschwärzten Glasrohr reflektiert, so dass auf der Hörsaalwand das Licht unter verschiedenen Relexionswinkeln auftrifft. Bei horizontaler Polarisation
Vorlesung Physik für Pharmazeuten und Biologen
 Vorlesung Physik für Pharmazeuten und Biologen Schwingungen Mechanische Wellen Akustik Freier harmonischer Oszillator Beispiel: Das mathematische Pendel Bewegungsgleichung : d s mg sinϕ = m dt Näherung
Vorlesung Physik für Pharmazeuten und Biologen Schwingungen Mechanische Wellen Akustik Freier harmonischer Oszillator Beispiel: Das mathematische Pendel Bewegungsgleichung : d s mg sinϕ = m dt Näherung
Brückenkurs Mathematik
 Brückenkurs Mathematik 6.10. - 17.10. Vorlesung 3 Geometrie Doris Bohnet Universität Hamburg - Department Mathematik Mi 8.10.2008 1 Geometrie des Dreiecks 2 Vektoren Länge eines Vektors Skalarprodukt Kreuzprodukt
Brückenkurs Mathematik 6.10. - 17.10. Vorlesung 3 Geometrie Doris Bohnet Universität Hamburg - Department Mathematik Mi 8.10.2008 1 Geometrie des Dreiecks 2 Vektoren Länge eines Vektors Skalarprodukt Kreuzprodukt
Harmonische Schwingung die einfachste Schwingung ist die harmonische Schwingung
 1. Schwingungen Fast alles schwingt, d.h. der Zustand ändert sich periodisch it der Zeit wie in Kreisbewegung. Bsp. Uhr, Kolben i Autootor, wippende Boote auf de Wasser. Haronische Schwingung die einfachste
1. Schwingungen Fast alles schwingt, d.h. der Zustand ändert sich periodisch it der Zeit wie in Kreisbewegung. Bsp. Uhr, Kolben i Autootor, wippende Boote auf de Wasser. Haronische Schwingung die einfachste
Kinematik des starren Körpers
 Technische Mechanik II Kinematik des starren Körpers Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/2010 Übersicht 1. Kinematik des Massenpunktes
Technische Mechanik II Kinematik des starren Körpers Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/2010 Übersicht 1. Kinematik des Massenpunktes
Kapitel 4. Lorentz-Tensoren
 Kapitel 4 Lorentz-Tensoren Nach Möglichkeit versucht man, die Gesetze der Physik so aufzustellen, dass sie in allen Inertialsystemen die gleiche Form haben, also forminvariant unter Translationen und Rotationen
Kapitel 4 Lorentz-Tensoren Nach Möglichkeit versucht man, die Gesetze der Physik so aufzustellen, dass sie in allen Inertialsystemen die gleiche Form haben, also forminvariant unter Translationen und Rotationen
Strukturgeologie. Proseminar WS 2004/2005 Montags Prof. Dr. E. Wallbrecher. Teil 1
 Strukturgeologie Proseminar WS 004/005 Montags.00 3.30 Prof. Dr. E. Wallbrecher Teil Lehrbücher zur Strukturgeologie G. G. H. H. Eisbacher (99): Einführung in in die die Tektonik.- (Enke) R. R. J. J. Twiss
Strukturgeologie Proseminar WS 004/005 Montags.00 3.30 Prof. Dr. E. Wallbrecher Teil Lehrbücher zur Strukturgeologie G. G. H. H. Eisbacher (99): Einführung in in die die Tektonik.- (Enke) R. R. J. J. Twiss
Theoretische Physik: Mechanik
 Ferienkurs Theoretische Physik: Mechanik Blatt 4 - Lösung Technische Universität München 1 Fakultät für Physik 1 Zwei Kugeln und der Satz von Steiner Nehmen Sie zwei Kugeln mit identischem Radius R und
Ferienkurs Theoretische Physik: Mechanik Blatt 4 - Lösung Technische Universität München 1 Fakultät für Physik 1 Zwei Kugeln und der Satz von Steiner Nehmen Sie zwei Kugeln mit identischem Radius R und
46 Eigenwerte und Eigenvektoren symmetrischer Matrizen
 46 Eigenwerte und Eigenvektoren symmetrischer Matrizen 46.1 Motivation Symmetrische Matrizen (a ij = a ji für alle i, j) kommen in der Praxis besonders häufig vor. Gibt es für sie spezielle Aussagen über
46 Eigenwerte und Eigenvektoren symmetrischer Matrizen 46.1 Motivation Symmetrische Matrizen (a ij = a ji für alle i, j) kommen in der Praxis besonders häufig vor. Gibt es für sie spezielle Aussagen über
Experimentalphysik II Elektromagnetische Schwingungen und Wellen
 Experimentalphysik II Elektromagnetische Schwingungen und Wellen Ferienkurs Sommersemester 2009 Martina Stadlmeier 10.09.2009 Inhaltsverzeichnis 1 Elektromagnetische Schwingungen 2 1.1 Energieumwandlung
Experimentalphysik II Elektromagnetische Schwingungen und Wellen Ferienkurs Sommersemester 2009 Martina Stadlmeier 10.09.2009 Inhaltsverzeichnis 1 Elektromagnetische Schwingungen 2 1.1 Energieumwandlung
1 Vektoren, Vektorräume, Abstände: 2D
 Vektoren, Vektorräume, Astände: D Definition: Die Menge aller (geordneten Paare reeller Zahlen (oder allgemeiner: Elemente eines elieigen Körpers, als Spalten geschrieen, ezeichnen wir als Vektoren: R
Vektoren, Vektorräume, Astände: D Definition: Die Menge aller (geordneten Paare reeller Zahlen (oder allgemeiner: Elemente eines elieigen Körpers, als Spalten geschrieen, ezeichnen wir als Vektoren: R
Lineare Algebra: Theorie und Anwendungen
 Lineare Algebra: Theorie und Anwendungen Sommersemester 2012 Bernhard Burgeth Universität des Saarlandes c 2010 2012, Bernhard Burgeth 1 VEKTOREN IN DER EBENE UND IM RAUM 2 1 Vektoren in der Ebene und
Lineare Algebra: Theorie und Anwendungen Sommersemester 2012 Bernhard Burgeth Universität des Saarlandes c 2010 2012, Bernhard Burgeth 1 VEKTOREN IN DER EBENE UND IM RAUM 2 1 Vektoren in der Ebene und
Lösungen der Übungsaufgaben III
 Mathematik für die ersten Semester (. Auflage): Lösungen der Übungsaufgaben III C. Zerbe, E. Ossner, W. Mückenheim 6. Man konstruiere die Winkelhalbierende eines beliebigen Winkels analog zur Konstruktion
Mathematik für die ersten Semester (. Auflage): Lösungen der Übungsaufgaben III C. Zerbe, E. Ossner, W. Mückenheim 6. Man konstruiere die Winkelhalbierende eines beliebigen Winkels analog zur Konstruktion
1 Vektoralgebra (3D euklidischer Raum R 3 )
") Institut für Physik der Martin-Luther-Universität Halle-Wittenberg WS 202/203 Vorlesung Elektrodynamik LAG PD Dr. Angelika Chassé) Vektoralgebra 3D euklidischer Raum R 3 ). Grundbegriffe = Vektordefinition
Institut für Physik der Martin-Luther-Universität Halle-Wittenberg WS 202/203 Vorlesung Elektrodynamik LAG PD Dr. Angelika Chassé) Vektoralgebra 3D euklidischer Raum R 3 ). Grundbegriffe = Vektordefinition
1 Lineare Algebra. 1.1 Matrizen und Vektoren. Slide 3. Matrizen. Eine Matrix ist ein rechteckiges Zahlenschema
 1 Lineare Algebra 1.1 Matrizen und Vektoren Slide 3 Matrizen Eine Matrix ist ein rechteckiges Zahlenschema eine n m-matrix A besteht aus n Zeilen und m Spalten mit den Matrixelementen a ij, i=1...n und
1 Lineare Algebra 1.1 Matrizen und Vektoren Slide 3 Matrizen Eine Matrix ist ein rechteckiges Zahlenschema eine n m-matrix A besteht aus n Zeilen und m Spalten mit den Matrixelementen a ij, i=1...n und
Hier wurde die Jacobi-Determinante der ZylinderKoordinaten verwendet (det J = ρ). Wir führen zunächst die ρ-integration durch: (R 2 H sin 2 φ )
. Wir führen zunächst die ρ-integration durch: (R 2 H sin 2 φ )") b) Für einen Zylinder bieten sich Zylinderkoordinaten an. Legt man den Ursprung in den Schwerpunkt und die z- bzw. x 3 - Achse entlang der Zylinderachse, verschwinden alle Deviationsmomente. Dies liegt
b) Für einen Zylinder bieten sich Zylinderkoordinaten an. Legt man den Ursprung in den Schwerpunkt und die z- bzw. x 3 - Achse entlang der Zylinderachse, verschwinden alle Deviationsmomente. Dies liegt
19.3 Oberflächenintegrale
 19.3 Oberflächenintegrale Definition: Sei D R 2 ein Gebiet und p : D R 3 eine C 1 -Abbildung x = p(u) mit x R 3 und u = (u 1, u 2 ) T D R 2 Sind für alle u D die beiden Vektoren und u 1 linear unabhängig,
19.3 Oberflächenintegrale Definition: Sei D R 2 ein Gebiet und p : D R 3 eine C 1 -Abbildung x = p(u) mit x R 3 und u = (u 1, u 2 ) T D R 2 Sind für alle u D die beiden Vektoren und u 1 linear unabhängig,
Technische Universität München Zentrum Mathematik. Übungsblatt 7
 Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
1 Fraktale Eigenschaften der Koch-Kurve
 Anhang Inhaltsverzeichnis Fraktale Eigenschaften der Koch-Kurve iii. Einführung.................................. iii.2 Defintion.................................... iii.3 Gesamtlänge der Koch-Kurve........................
Anhang Inhaltsverzeichnis Fraktale Eigenschaften der Koch-Kurve iii. Einführung.................................. iii.2 Defintion.................................... iii.3 Gesamtlänge der Koch-Kurve........................
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
5.1 Determinanten der Ordnung 2 und 3. a 11 a 12 a 21 a 22. det(a) =a 11 a 22 a 12 a 21. a 11 a 21
 =a 11 a 22 a 12 a 21. a 11 a 21") 5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
Einführung in die Kristallographie
 Einführung in die Kristallographie Gerhard Heide Institut für Mineralogie Professur für Allgemeine und Angewandte Mineralogie Brennhausgasse 14 03731-39-2665 oder -2628 gerhard.heide@mineral.tu-freiberg.de
Einführung in die Kristallographie Gerhard Heide Institut für Mineralogie Professur für Allgemeine und Angewandte Mineralogie Brennhausgasse 14 03731-39-2665 oder -2628 gerhard.heide@mineral.tu-freiberg.de
Mathematik für Chemische Technologie 2
 Mathematik für Chemische Technologie 2 Themenüberblick: Funktionen mehrerer unabhängigen Veränderlichen Vektoralgebra Lineare Gleichungssysteme und Determinanten Fehlerrechnung Schwerpunkt des Sommersemesters
Mathematik für Chemische Technologie 2 Themenüberblick: Funktionen mehrerer unabhängigen Veränderlichen Vektoralgebra Lineare Gleichungssysteme und Determinanten Fehlerrechnung Schwerpunkt des Sommersemesters
Thema 10 Gewöhnliche Differentialgleichungen
 Thema 10 Gewöhnliche Differentialgleichungen Viele Naturgesetze stellen eine Beziehung zwischen einer physikalischen Größe und ihren Ableitungen (etwa als Funktion der Zeit dar: 1. ẍ = g (freier Fall;
Thema 10 Gewöhnliche Differentialgleichungen Viele Naturgesetze stellen eine Beziehung zwischen einer physikalischen Größe und ihren Ableitungen (etwa als Funktion der Zeit dar: 1. ẍ = g (freier Fall;
Kapitel XII - Kennzahlen mehrdimensionaler Zufallsvariablen
 Institut für Volkswirtschaftslehre (ECON) Lehrstuhl für Ökonometrie und Statistik Kapitel XII - Kennzahlen mehrdimensionaler Zufallsvariablen Wahrscheinlichkeitstheorie Prof. Dr. W.-D. Heller Hartwig Senska
Institut für Volkswirtschaftslehre (ECON) Lehrstuhl für Ökonometrie und Statistik Kapitel XII - Kennzahlen mehrdimensionaler Zufallsvariablen Wahrscheinlichkeitstheorie Prof. Dr. W.-D. Heller Hartwig Senska
8 Die Riemannsche Zahlenkugel
 8 Die Riemannsche Zahlenkugel Wir untersuchen zunächst Geraden- und Kreisgleichungen in der komplexen Ebene C = R 2. Geradengleichungen Die Parameterdarstellung einer Geraden durch zwei Punkte z 1 z 2
8 Die Riemannsche Zahlenkugel Wir untersuchen zunächst Geraden- und Kreisgleichungen in der komplexen Ebene C = R 2. Geradengleichungen Die Parameterdarstellung einer Geraden durch zwei Punkte z 1 z 2
Technische Universität Berlin Fakultät II Institut für Mathematik SS 13 G. Bärwolff, C. Mehl, G. Penn-Karras
 Technische Universität Berlin Fakultät II Institut für Mathematik SS 3 G. Bärwolff, C. Mehl, G. Penn-Karras 9..3 Oktober Klausur Analysis II für Ingenieure Rechenteil. Aufgabe Punkte i) Wir berechnen zunächst
Technische Universität Berlin Fakultät II Institut für Mathematik SS 3 G. Bärwolff, C. Mehl, G. Penn-Karras 9..3 Oktober Klausur Analysis II für Ingenieure Rechenteil. Aufgabe Punkte i) Wir berechnen zunächst
Serie 10: Inverse Matrix und Determinante
 D-ERDW, D-HEST, D-USYS Mathematik I HS 5 Dr Ana Cannas Serie 0: Inverse Matrix und Determinante Bemerkung: Die Aufgaben dieser Serie bilden den Fokus der Übungsgruppen vom und 5 November Gegeben sind die
D-ERDW, D-HEST, D-USYS Mathematik I HS 5 Dr Ana Cannas Serie 0: Inverse Matrix und Determinante Bemerkung: Die Aufgaben dieser Serie bilden den Fokus der Übungsgruppen vom und 5 November Gegeben sind die
Vektoren, Vektorräume
 Vektoren, Vektorräume Roman Wienands Sommersemester 2010 Mathematisches Institut der Universität zu Köln Roman Wienands (Universität zu Köln) Mathematik II für Studierende der Chemie Sommersemester 2010
Vektoren, Vektorräume Roman Wienands Sommersemester 2010 Mathematisches Institut der Universität zu Köln Roman Wienands (Universität zu Köln) Mathematik II für Studierende der Chemie Sommersemester 2010
Vom Spannungstensor zum Impulsstrom
 Vom Spannungstensor zum Impulsstrom Physikalische Grundpraktika FU-Berlin Quelle: Skript zur Mechanik, Herrmann Welche Größe wird durch den Pfeil symbolisiert? Wie hängt die Größe (formal) mit anderen
Vom Spannungstensor zum Impulsstrom Physikalische Grundpraktika FU-Berlin Quelle: Skript zur Mechanik, Herrmann Welche Größe wird durch den Pfeil symbolisiert? Wie hängt die Größe (formal) mit anderen
Typisch metallische Eigenschaften:
 Typisch metallische Eigenschaften: hohe elektrische Leitfähigkeit hohe thermische Leitfähigkeit bei Energiezufuhr (Wärme, elektromagnetische Strahlung) können Elektronen emittiert werden metallischer Glanz
Typisch metallische Eigenschaften: hohe elektrische Leitfähigkeit hohe thermische Leitfähigkeit bei Energiezufuhr (Wärme, elektromagnetische Strahlung) können Elektronen emittiert werden metallischer Glanz
Übungen zur Ingenieur-Mathematik III WS 2009/10 Blatt 10 21.12.2009
 Übungen zur Ingenieur-Mathematik III WS 2009/10 Blatt 10 21.12.2009 Aufgabe 35: Thema: Singulärwertzerlegung und assoziierte Unterräume Sei A eine m n Matrix mit Rang r und A = UDV T ihre Singulärwertzerlegung.
Übungen zur Ingenieur-Mathematik III WS 2009/10 Blatt 10 21.12.2009 Aufgabe 35: Thema: Singulärwertzerlegung und assoziierte Unterräume Sei A eine m n Matrix mit Rang r und A = UDV T ihre Singulärwertzerlegung.
2 Grundlagen der Elastizitätstheorie
 2 Grundlagen der Elastizitätstheorie 2.1 Spannungszustand... 71 2.1.1 Spannungsvektor, Spannungstensor, Indexschreibweise. 71 2.1.2 Koordinatentransformation... 76 2.1.3 Hauptspannungen, Invarianten, Mohrsche
2 Grundlagen der Elastizitätstheorie 2.1 Spannungszustand... 71 2.1.1 Spannungsvektor, Spannungstensor, Indexschreibweise. 71 2.1.2 Koordinatentransformation... 76 2.1.3 Hauptspannungen, Invarianten, Mohrsche
WS 2010/ Januar Mathematisches Institut der Universität München Prof. Dr. Rudolf Fritsch
 Mathematisches Institut der Universität München Prof. Dr. Rudolf Fritsch WS 2010/2011 14. Januar 2011 Geometrie mit Übungen Übungsblatt 9, Musterlösungen Aufgabe 33. Es werden Kreise in der Euklidischen
Mathematisches Institut der Universität München Prof. Dr. Rudolf Fritsch WS 2010/2011 14. Januar 2011 Geometrie mit Übungen Übungsblatt 9, Musterlösungen Aufgabe 33. Es werden Kreise in der Euklidischen
Übungsaufgaben Vektoren
 Kallenrode, www.sotere.uos.de Übungsaufgaben Vektoren 1. Gegeben sind die Einheitsvektoren in Zylinderkoordinaten e ϱ = cos ϕ sin ϕ, e ϕ = sin ϕ cos ϕ und e z = 0 0 0 0 1 und Kugelkoordinaten: sin ϑ cos
Kallenrode, www.sotere.uos.de Übungsaufgaben Vektoren 1. Gegeben sind die Einheitsvektoren in Zylinderkoordinaten e ϱ = cos ϕ sin ϕ, e ϕ = sin ϕ cos ϕ und e z = 0 0 0 0 1 und Kugelkoordinaten: sin ϑ cos
2 Die Dimension eines Vektorraums
 2 Die Dimension eines Vektorraums Sei V ein K Vektorraum und v 1,..., v r V. Definition: v V heißt Linearkombination der Vektoren v 1,..., v r falls es Elemente λ 1,..., λ r K gibt, so dass v = λ 1 v 1
2 Die Dimension eines Vektorraums Sei V ein K Vektorraum und v 1,..., v r V. Definition: v V heißt Linearkombination der Vektoren v 1,..., v r falls es Elemente λ 1,..., λ r K gibt, so dass v = λ 1 v 1
3. Übungsblatt Aufgaben mit Lösungen
 . Übungsblatt Aufgaben mit Lösungen Aufgabe : Gegeben sind zwei Teilmengen von R : E := {x R : x x = }, und F ist eine Ebene durch die Punkte A = ( ), B = ( ) und C = ( ). (a) Stellen Sie diese Mengen
. Übungsblatt Aufgaben mit Lösungen Aufgabe : Gegeben sind zwei Teilmengen von R : E := {x R : x x = }, und F ist eine Ebene durch die Punkte A = ( ), B = ( ) und C = ( ). (a) Stellen Sie diese Mengen
A. N. Danilewsky 31. Fortsetzung von Kapitel 2
 A. N. Danilewsky 31 Fortsetzung von Kapitel 2 2.3 Darstellung von Körpern... 32 2.3.1 Othogonale Parallelprojektion... 32 2.3.2 Stereographische Projektion... 34 2.3.3 Gnomonische Projektion... 42 32 Kristallographie
A. N. Danilewsky 31 Fortsetzung von Kapitel 2 2.3 Darstellung von Körpern... 32 2.3.1 Othogonale Parallelprojektion... 32 2.3.2 Stereographische Projektion... 34 2.3.3 Gnomonische Projektion... 42 32 Kristallographie
Trigonometrie. bekannte Zusammenhänge. 4-Streckensatz: groß/klein = groß/klein. Zusammenhänge im allgemeinen Dreieck:
 Trigonometrie bekannte Zusammenhänge 4-Streckensatz: groß/klein = groß/klein Zusammenhänge im allgemeinen Dreieck: Summe zweier Seiten größer als dritte Seitenlänge: a + b > c Innenwinkelsumme: Summe der
Trigonometrie bekannte Zusammenhänge 4-Streckensatz: groß/klein = groß/klein Zusammenhänge im allgemeinen Dreieck: Summe zweier Seiten größer als dritte Seitenlänge: a + b > c Innenwinkelsumme: Summe der
4. Übungsblatt zur Mathematik I für Maschinenbau
 Fachbereich Mathematik Prof. Dr. M. Joswig Dr. habil. Sören Kraußhar Dipl.-Math. Katja Kulas 4. Übungsblatt zur Mathematik I für Maschinenbau Gruppenübung WS /..-7.. Aufgabe G (Geraden im R ) Bestimmen
Fachbereich Mathematik Prof. Dr. M. Joswig Dr. habil. Sören Kraußhar Dipl.-Math. Katja Kulas 4. Übungsblatt zur Mathematik I für Maschinenbau Gruppenübung WS /..-7.. Aufgabe G (Geraden im R ) Bestimmen
Magnetostriktion. Magnetostriktion: Jegliche Änderung der Dimension eines Körpers durch
 Definition Magnetostriktion: Jegliche Änderung der Dimension eines Körpers durch Änderung seines magnetischen Zustandes! Es gilt: λ = dl/l (lineare Magnetostriktion) Prinzipiell bei allen magnetischen
Definition Magnetostriktion: Jegliche Änderung der Dimension eines Körpers durch Änderung seines magnetischen Zustandes! Es gilt: λ = dl/l (lineare Magnetostriktion) Prinzipiell bei allen magnetischen
Inhalt dieses Vorlesungsteils - ROADMAP
 Inhalt dieses Vorlesungsteils - ROADMAP 2 Von der Kavitation zur Sonochemie 21 Industrieller Einsatz von Ultraschall 22 Physikalische Grundlagen I Was ist Ultraschall? 23 Einführung in die Technik des
Inhalt dieses Vorlesungsteils - ROADMAP 2 Von der Kavitation zur Sonochemie 21 Industrieller Einsatz von Ultraschall 22 Physikalische Grundlagen I Was ist Ultraschall? 23 Einführung in die Technik des
Grundlagen der Vektorrechnung
 Grundlagen der Vektorrechnung Ein Vektor a ist eine geordnete Liste von n Zahlen Die Anzahl n dieser Zahlen wird als Dimension des Vektors bezeichnet Schreibweise: a a a R n Normale Reelle Zahlen nennt
Grundlagen der Vektorrechnung Ein Vektor a ist eine geordnete Liste von n Zahlen Die Anzahl n dieser Zahlen wird als Dimension des Vektors bezeichnet Schreibweise: a a a R n Normale Reelle Zahlen nennt
Anleitung zu Blatt 4 Differentialgleichungen I für Studierende der Ingenieurwissenschaften
 Fachbereich Mathematik der Universität Hamburg WiSe / Dr Hanna Peywand Kiani 722 Anleitung zu Blatt 4 Differentialgleichungen I für Studierende der Ingenieurwissenschaften Lineare Differentialgleichungssysteme,
Fachbereich Mathematik der Universität Hamburg WiSe / Dr Hanna Peywand Kiani 722 Anleitung zu Blatt 4 Differentialgleichungen I für Studierende der Ingenieurwissenschaften Lineare Differentialgleichungssysteme,
Flächen und ihre Krümmungen
 Flächen und ihre Krümmungen Teilnehmer: Levi Borodenko Anna Heinrich Jochen Jacobs Robert Jendersie Tanja Lappe Manuel Radatz Maximilian Rogge Käthe-Kollwitz-Oberschule, Berlin Käthe-Kollwitz-Oberschule,
Flächen und ihre Krümmungen Teilnehmer: Levi Borodenko Anna Heinrich Jochen Jacobs Robert Jendersie Tanja Lappe Manuel Radatz Maximilian Rogge Käthe-Kollwitz-Oberschule, Berlin Käthe-Kollwitz-Oberschule,
Theoretische Physik I: Lösungen Blatt Michael Czopnik
 Theoretische Physik I: Lösungen Blatt 2 15.10.2012 Michael Czopnik Aufgabe 1: Scheinkräfte Nutze Zylinderkoordinaten: x = r cos ϕ y = r sin ϕ z = z Zweimaliges differenzieren ergibt: ẍ = r cos ϕ 2ṙ ϕ sin
Theoretische Physik I: Lösungen Blatt 2 15.10.2012 Michael Czopnik Aufgabe 1: Scheinkräfte Nutze Zylinderkoordinaten: x = r cos ϕ y = r sin ϕ z = z Zweimaliges differenzieren ergibt: ẍ = r cos ϕ 2ṙ ϕ sin
Algebra 3.
 Algebra 3 www.schulmathe.npage.de Aufgaben 1. In einem kartesischen Koordinatensystem sind die Punkte A( 3), B( ) sowie für jedes a (a R) ein Punkt P a (a a a) gegeben. a) Zeigen Sie, dass alle Punkte
Algebra 3 www.schulmathe.npage.de Aufgaben 1. In einem kartesischen Koordinatensystem sind die Punkte A( 3), B( ) sowie für jedes a (a R) ein Punkt P a (a a a) gegeben. a) Zeigen Sie, dass alle Punkte
2. Räumliche Bewegung
 2. Räumliche Bewegung Prof. Dr. Wandinger 1. Kinematik des Punktes TM 3 1.2-1 2. Räumliche Bewegung Wenn die Bahn des Punkts nicht bekannt ist, reicht die Angabe einer Koordinate nicht aus, um seinen Ort
2. Räumliche Bewegung Prof. Dr. Wandinger 1. Kinematik des Punktes TM 3 1.2-1 2. Räumliche Bewegung Wenn die Bahn des Punkts nicht bekannt ist, reicht die Angabe einer Koordinate nicht aus, um seinen Ort
entspricht der Länge des Vektorpfeils. Im R 2 : x =
 Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen dx+ey+f = 0 1.1
 Hauptachsentransformation. Einleitung Schneidet man den geraden Kreiskegel mit der Gleichung = + und die Ebene ++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen +2 + +dx+ey+f = 0. Die
Hauptachsentransformation. Einleitung Schneidet man den geraden Kreiskegel mit der Gleichung = + und die Ebene ++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen +2 + +dx+ey+f = 0. Die
Mathematische Probleme, SS 2013 Donnerstag $Id: quadratisch.tex,v /08/12 09:49:46 hk Exp $ c a b = 1 3. tan(2φ) =
 =") Mathematische Probleme SS 13 Donnerstag 136 $Id: quadratischtexv 18 13/08/1 09:49:46 hk Exp $ 4 Kegelschnitte 41 Quadratische Gleichungen Nachdem wir in der letzten Sitzung die Hauptachsentransformation
Mathematische Probleme SS 13 Donnerstag 136 $Id: quadratischtexv 18 13/08/1 09:49:46 hk Exp $ 4 Kegelschnitte 41 Quadratische Gleichungen Nachdem wir in der letzten Sitzung die Hauptachsentransformation
7 Die Hamilton-Jacobi-Theorie
 7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
Klausur zur Einführung in die Geometrie im SS 2002
 Klausur zur Einführung in die Geometrie im SS 2002 Name, Vorname... Matr.Nr.... Semester-Anzahl im SS 2002:... Studiengang GH/R/S Tutor/in:... Aufg.1 Aufg,2 Aufg.3 Aufg.4 Aufg.5 Aufg.6 Aufg.7 Aufg.8 Gesamt
Klausur zur Einführung in die Geometrie im SS 2002 Name, Vorname... Matr.Nr.... Semester-Anzahl im SS 2002:... Studiengang GH/R/S Tutor/in:... Aufg.1 Aufg,2 Aufg.3 Aufg.4 Aufg.5 Aufg.6 Aufg.7 Aufg.8 Gesamt
2.3.1 Rechtshändiges und linkshändiges Koordinatensystem
 2.3. Rechtshändiges und linkshändiges Koordinatensstem Die Koordinatenachsen im dreidimensionalen Raum lassen sich auf wei verschieden Arten anordnen: Linkshändig und Rechtshändig (s. Abbildung 2.9). Um
2.3. Rechtshändiges und linkshändiges Koordinatensstem Die Koordinatenachsen im dreidimensionalen Raum lassen sich auf wei verschieden Arten anordnen: Linkshändig und Rechtshändig (s. Abbildung 2.9). Um
Lineare Algebra II, Lösungshinweise Blatt 9
 Prof Dr Katrin Wendland Priv Doz Dr Katrin Leschke Christoph Tinkl SS 27 Lineare Algebra II, Lösungshinweise Blatt 9 Aufgabe (4 Punkte) Sei 2 3 4 A = 5 6 Berechnen Sie A k für alle k N und verifizieren
Prof Dr Katrin Wendland Priv Doz Dr Katrin Leschke Christoph Tinkl SS 27 Lineare Algebra II, Lösungshinweise Blatt 9 Aufgabe (4 Punkte) Sei 2 3 4 A = 5 6 Berechnen Sie A k für alle k N und verifizieren
Einführung in die Mathematik für Informatiker
 Einführung in die Mathematik für Informatiker Prof. Dr. www.math.tu-dresden.de/ baumann 12.12.2016 9. Vorlesung Eigenschaften linearer Abbildungen Beschreibung linearer Abbildungen durch Matrizen... Eigenschaften
Einführung in die Mathematik für Informatiker Prof. Dr. www.math.tu-dresden.de/ baumann 12.12.2016 9. Vorlesung Eigenschaften linearer Abbildungen Beschreibung linearer Abbildungen durch Matrizen... Eigenschaften
Aufgabe K5: Kurzfragen (9 1 = 9 Punkte)
") Aufgabe K5: Kurzfragen (9 = 9 Punkte) Beantworten Sie nur, was gefragt ist. (a) Wie transformiert das Vektorpotential bzw. das magnetische Feld unter Eichtransformationen? Wie ist die Coulomb-Eichung definiert?
Aufgabe K5: Kurzfragen (9 = 9 Punkte) Beantworten Sie nur, was gefragt ist. (a) Wie transformiert das Vektorpotential bzw. das magnetische Feld unter Eichtransformationen? Wie ist die Coulomb-Eichung definiert?
gekoppelte Pendelreihe Wellenmaschine Seilwelle (hin und her)
") Mechanik Wellen 16. Wellen 16.1. Einleitung Beispiele: gekoppelte Pendelreihe Wellenmaschine Seilwelle (hin und her) Was passiert? Das schwingende Medium/Teilchen bewegt sich nicht fort, sondern schwingt
Mechanik Wellen 16. Wellen 16.1. Einleitung Beispiele: gekoppelte Pendelreihe Wellenmaschine Seilwelle (hin und her) Was passiert? Das schwingende Medium/Teilchen bewegt sich nicht fort, sondern schwingt
Fakultät für Physik Wintersemester 2016/17. Übungen zur Physik I für Chemiker und Lehramt mit Unterrichtsfach Physik
 Fakultät für Physik Wintersemester 16/17 Übungen zur Physik I für Chemiker und Lehramt mit Unterrichtsfach Physik Dr. Andreas K. Hüttel Blatt 8 / 7.1.16 1. Schwerpunkte Berechnen Sie den Schwerpunkt in
Fakultät für Physik Wintersemester 16/17 Übungen zur Physik I für Chemiker und Lehramt mit Unterrichtsfach Physik Dr. Andreas K. Hüttel Blatt 8 / 7.1.16 1. Schwerpunkte Berechnen Sie den Schwerpunkt in
PP Physikalisches Pendel
 PP Physikalisches Pendel Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Ungedämpftes physikalisches Pendel.......... 2 2.2 Dämpfung
PP Physikalisches Pendel Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Ungedämpftes physikalisches Pendel.......... 2 2.2 Dämpfung
4 Affine Koordinatensysteme
 4 Affine Koordinatensysteme Sei X φ ein affiner Raum und seien p,, p r X Definition: Nach ( c ist der Durchschnitt aller affinen Unterräume Z X, welche die Menge {p,,p r } umfassen, selbst ein affiner
4 Affine Koordinatensysteme Sei X φ ein affiner Raum und seien p,, p r X Definition: Nach ( c ist der Durchschnitt aller affinen Unterräume Z X, welche die Menge {p,,p r } umfassen, selbst ein affiner
Mathematische Formeln für das Studium an Fachhochschulen
 Mathematische Formeln für das Studium an Fachhochschulen von Richard Mohr. Auflage Hanser München 0 Verlag C.H. Beck im Internet: www.beck.de ISBN 978 446 455 4 Zu Inhaltsverzeichnis schnell und portofrei
Mathematische Formeln für das Studium an Fachhochschulen von Richard Mohr. Auflage Hanser München 0 Verlag C.H. Beck im Internet: www.beck.de ISBN 978 446 455 4 Zu Inhaltsverzeichnis schnell und portofrei
Abbildung 5.1: stabile und instabile Ruhelagen
 Kapitel 5 Stabilität Eine intuitive Vorstellung vom Konzept der Stabilität vermitteln die in Abb. 5.1 dargestellten Situationen. Eine Kugel rollt unter dem Einfluss von Gravitation und Reibung auf einer
Kapitel 5 Stabilität Eine intuitive Vorstellung vom Konzept der Stabilität vermitteln die in Abb. 5.1 dargestellten Situationen. Eine Kugel rollt unter dem Einfluss von Gravitation und Reibung auf einer
XII. Elektromagnetische Wellen in Materie
 XII. Elektromagnetische Wellen in Materie Unten den wichtigsten Lösungen der makroskopischen Maxwell-Gleichungen (XI.1) in Materie sind die (fortschreitenden) Wellen. Um die zugehörigen Wellengleichungen
XII. Elektromagnetische Wellen in Materie Unten den wichtigsten Lösungen der makroskopischen Maxwell-Gleichungen (XI.1) in Materie sind die (fortschreitenden) Wellen. Um die zugehörigen Wellengleichungen
Tutorium Mathematik II, M Lösungen
 Tutorium Mathematik II, M Lösungen März 03 *Aufgabe Bestimmen Sie durch Hauptachsentransformation Lage und Typ der Kegelschnitte (a) 3x + 4x x + 3x 4x = 0, (b) 3x + 4x x + 3x 4x 6 = 0, (c) 3x + 4x x +
Tutorium Mathematik II, M Lösungen März 03 *Aufgabe Bestimmen Sie durch Hauptachsentransformation Lage und Typ der Kegelschnitte (a) 3x + 4x x + 3x 4x = 0, (b) 3x + 4x x + 3x 4x 6 = 0, (c) 3x + 4x x +
Grundsätzliches Produkte Anwendungen in der Geometrie. Vektorrechnung. Fakultät Grundlagen. Juli 2015
 Vektorrechnung Fakultät Grundlagen Juli 205 Fakultät Grundlagen Vektorrechnung Übersicht Grundsätzliches Grundsätzliches Vektorbegriff Algebraisierung der Vektorrechnung Betrag 2 Skalarprodukt Vektorprodukt
Vektorrechnung Fakultät Grundlagen Juli 205 Fakultät Grundlagen Vektorrechnung Übersicht Grundsätzliches Grundsätzliches Vektorbegriff Algebraisierung der Vektorrechnung Betrag 2 Skalarprodukt Vektorprodukt
8 Tangenten an Quadriken
 8 Tangenten an Quadriken A Geraden auf Quadriken: Sei A 0 eine symmetrische n n Matri und Q : t A + b t + c = 0 eine nicht leere Quadrik im R n, b R n, c R. g = p + R v R n ist die Gerade durch p mit Richtung
8 Tangenten an Quadriken A Geraden auf Quadriken: Sei A 0 eine symmetrische n n Matri und Q : t A + b t + c = 0 eine nicht leere Quadrik im R n, b R n, c R. g = p + R v R n ist die Gerade durch p mit Richtung
Skalarprodukt und Orthogonalität
 Skalarprodukt und Orthogonalität Skalarprodukt und Orthogonalität in R n Wir erinnern an das euklidische Skalarprodukt im R 2 : Wir erinnern an das euklidische Skalarprodukt im R 2 : < a, b >:= α 1 β 1
Skalarprodukt und Orthogonalität Skalarprodukt und Orthogonalität in R n Wir erinnern an das euklidische Skalarprodukt im R 2 : Wir erinnern an das euklidische Skalarprodukt im R 2 : < a, b >:= α 1 β 1
6.4. Polarisation und Doppelbrechung. Exp. 51: Doppelbrechung am Kalkspat. Dieter Suter - 389 - Physik B2. 6.4.1. Polarisation
 Dieter Suter - 389 - Physik B2 6.4. Polarisation und Doppelbrechung 6.4.1. Polarisation Wie andere elektromagnetische Wellen ist Licht eine Transversalwelle. Es existieren deshalb zwei orthogonale Polarisationsrichtungen.
Dieter Suter - 389 - Physik B2 6.4. Polarisation und Doppelbrechung 6.4.1. Polarisation Wie andere elektromagnetische Wellen ist Licht eine Transversalwelle. Es existieren deshalb zwei orthogonale Polarisationsrichtungen.
13. Klasse TOP 10 Grundwissen 13 Geradengleichungen 01
 . Klasse TOP 0 Grundwissen Geradengleichungen 0 Punkt-Richtungs-Form Geraden sind gegeben durch einen Aufpunkt A (mit Ortsvektor a) auf der Geraden und einen Richtungsvektor u: x = a + λ u, λ IR. (Interpretation:
. Klasse TOP 0 Grundwissen Geradengleichungen 0 Punkt-Richtungs-Form Geraden sind gegeben durch einen Aufpunkt A (mit Ortsvektor a) auf der Geraden und einen Richtungsvektor u: x = a + λ u, λ IR. (Interpretation:
Skript zur Vorlesung. Lineare Algebra. Prof. Dr.-Ing. Katina Warendorf. 2. Oktober 2014
 Skript zur Vorlesung Prof. Dr.-Ing. Katina Warendorf 2. Oktober 2014 erstellt von Sindy Engel erweitert von Prof. Dr.-Ing. Katina Warendorf Inhaltsverzeichnis 1 Vektoren 4 1.1 Grundbegriffe.................................
Skript zur Vorlesung Prof. Dr.-Ing. Katina Warendorf 2. Oktober 2014 erstellt von Sindy Engel erweitert von Prof. Dr.-Ing. Katina Warendorf Inhaltsverzeichnis 1 Vektoren 4 1.1 Grundbegriffe.................................