Ziel: Erkennen von Geraden allgemeiner: von einfachen parametrischen Kurven (Kreise, Ellipsen...)
|
|
|
- August Kraus
- vor 7 Jahren
- Abrufe
Transkript
1 6. Die Hough-Transformation (sprich: "haff") P.V.C. Hough, Patentschrift von 1962 Ziel: Erkennen von Geraden allgemeiner: von einfachen parametrischen Kurven (Kreise, Ellipsen...) Anwendung: Detektion kollinearer Punkte Konturbeschreibung auch oft zur Bildsegmentierung gerechnet Idee: Transformation in einen Raum, wo Geraden (bzw. andere Kurven) als Punkte dargestellt werden kollineare Geradenstücke fallen alle auf einen Punkt Zählung in einer Akkumulator-Matrix Maxima in dieser Matrix entsprechen den Geraden im Originalbild Geradengleichung: y = mx + b Parameter m, b (Steigung, y-achsen-abschnitt) wenig geeignet, da m auch werden kann bessere Geradendarstellung: Hessesche Normalform (HNF) Herleitung: Gerade kann charakterisiert werden durch Normaleneinheitsvektor n r (steht senkrecht zur Geraden und zeigt weg von 0) und ihren Abstand r vom Nullpunkt 153
2 r n r liegt auf der Geraden r für jeden beliebigen Punkt p auf der Geraden gilt: r r p r n hat die Richtung der Geraden r r r ( p r n) n r r r ( p r n) n = 0 r r p n r 1= 0 r r p n = r (HNF) (der dicke Punkt bezeichnet das Skalarprodukt). Statt der Angabe beider Komponenten von n r genügt der n r Winkel θ von zur x-achse: cosθ n r = sinθ x Somit (mit p r = ): y Geradengleichung x cos θ + y sin θ = r Codierung der Geraden durch (r, θ). 154
3 Somit kann jede Gerade durch einen Punkt im (r, θ)-raum dargestellt werden: (θ im Intervall [0; π), r darf negativ werden.) Hough-Transformation: Gerade-zu-Punkt-Transformation dient der Aufbereitung der Daten, um sie in einem nachfolgenden Schritt einfacher auswerten zu können Vorangehende Schritte sind i.allg.: Konturextraktion durch Gradientenoperation (z.b. Sobel, Laplace) Verdünnung des Kantenbildes (dazu später mehr) Richtung orthogonal zum Gradienten stellt Kontur-Richtung dar 155
4 Beispiel: 5 Kontur-Vektoren, die auf einer Geraden liegen Winkelinformation θ aus der Richtung des Gradienten r aus x, y und θ hier für alle 5 Punkte dasselbe r Wert 5 in der Akkumulator-Tabelle (Akkumulator diskretisiert wie ein digitales Bild) Ergebnis der Hough-Transformation: gefüllter Akkumulator nächste Schritte: evtl. "Säubern" des Akkumulators (Beseitigung von Störeinflüssen: etwa Zusammenfassen von Clustern) Analyse des Akkumulators (Maxima, Überschreitung von Schwellenwerten) Rücktransformation der gefundenen "kritischen Punkte" (Maxima) ins Originalbild: dort Geraden Problem: man will meist Geradenstücke haben (Information über Anfangs- und Endpunkte), keine kompletten Geraden 156
5 Verwendung der kompletten Geraden als "Wegweiser" durch das Originalbild: z.b. dort morphologischen Filter entlanglaufen lassen Vergleich der Pixel rechts und links der Geraden wenn vorgegebene Grauwertdifferenz überschritten wird: Filtermaske befindet sich auf einer Objektkontur Kompletter Arbeitsgang (aus Bässmann & Kreyss 1998): 157
: Ergebnisse (invertiert): Original Akkumulator")
 im Originalbild Richtungsbild")
6 Beispiel mit AdOculos-Software (Setup HOUGH.SET): Ergebnisse (invertiert): Original Akkumulator Akkumulator Geraden Geradensegmente Kantenbild (geclustert) im Originalbild Richtungsbild tabellarische Darstellung d. Seg. 158
: a, b: ungleichmäßig beleuchtete, verrauschte Quadrate c, d: entsprechende Hough-Modellräume ( (r, θ)-ebene) zu a und b Beachte: parallele Geraden stehen")
7 Vorteil: Geraden werden auch erkannt, wenn sie verrauscht sind oder Unterbrechungen aufweisen. anderes Beispiel (aus Jähne 2002): a, b: ungleichmäßig beleuchtete, verrauschte Quadrate c, d: entsprechende Hough-Modellräume ( (r, θ)-ebene) zu a und b Beachte: parallele Geraden stehen in derselben Spalte des Akkumulators Verfahren auch zum Erkennen von Parallelität verwendbar. 159
 Clusterung im Akkumulator kann die \"falschen\" Geraden entfernen großer Speicherbedarf des Akkumulators Tracking der Geraden ist rechenaufwändig verschiedene Verbesserungen des Verfahrens wurden")
8 Probleme: in dieser Form nur zur Detektion von geraden Konturen geeignet ( aber Verallgemeinerung möglich!) Clusterung im Akkumulator kann die "falschen" Geraden entfernen großer Speicherbedarf des Akkumulators Tracking der Geraden ist rechenaufwändig verschiedene Verbesserungen des Verfahrens wurden vorgeschlagen Verallgemeinerung: z.b. auf Kreise (aus Sonka et al. 1999): (a) Original, (b) Kantenbild, (c) Parameterraum, (d) Orig. m. überlagerten Kreisen 160
9 verallgemeinerte Hough-Transformation in ähnlicher Weise möglich für Ellipsen, Parabeln... weitere Verallgemeinerung: für beliebige (nicht-parametrische), aber fest vorgegebene Form, die im Bild aufgefunden werden soll generalized Hough transform nach Ballard (s. Sonka et al. 1999): in der zu suchenden Form (Kontur) wird ein Referenzpunkt R festgelegt in einem preprocessing-schritt wird eine R-table (Referenztabelle) angelegt: für jeden von R ausgehenden Strahl wird der Schnittpunkt mit der Konturlinie der Form bestimmt im Schnittpunkt wird die Kontur-Richtung und der Abstand von R bestimmt und in die Tabelle eingetragen die Tabelle wird nach den Kontur-Richtungen (Winkeln) sortiert für jeden Kontur-Punkt (mit Richtungsinformation) im Bild wird nun anhand der Tabelle ein Kandidaten-Punkt für R (unter der Hypothese, dass diese Kontur an dieser Stelle durch die gesuchte Form erzeugt wurde) errechnet (evtl. auch mehrere Kandidaten-Punkte) die Koordinatenpaare der Kandidaten-Punkte bilden den Hough space (Parameterraum; Akkumulator) bei Punkten mit hohem Akkumulator-Eintrag ist tatsächlich die gesuchte Form lokalisiert wenn Rotationen und Skalierungen der gesuchten Form zugelassen sind, erhöht sich die Dimension des Hough space von 2 auf 4 161
10 zum preprocessing der Konturpunkte (Erstellung der R-table): Beachte: Nach der Hough-Transformation (einfach oder verallgemeinert) ist die Aufgabe der automatischen Detektion vorgegebener Formen noch nicht gelöst. Detektion dunkler Stellen im Akkumulator-Raum zu leisten evtl. Zusatzinformation aus dem Bild erforderlich (z.b. Endpunkte von Geradenstücken) je komplizierter die Form, desto mehr Parameter werden benötigt Akkumulator-Raum wird hochdimensional Verfahren wird sehr speicher- und rechenintensiv Einsatz der Hough-Transformation: besonders in industriellen Anwendungen einfache Formen werden gesucht viele Konturen sind Geradenstücke oder Kreisbögen Parameter können oft eingeschränkt werden 162
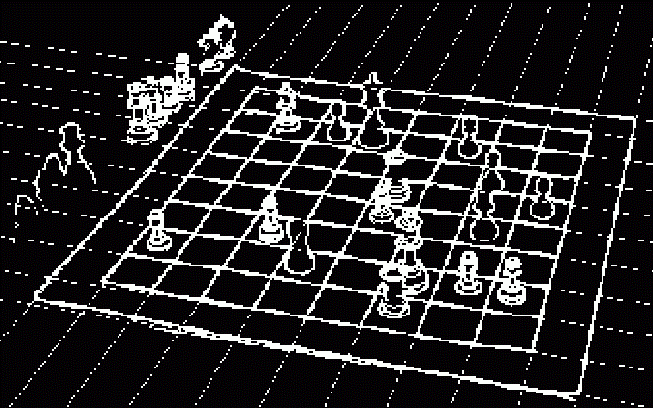
: Original-Aufnahme Kantenbild")
11 Beispiel Schachbrett (aus Beichel 2002): Original-Aufnahme Kantenbild 163
")
12 Akkumulator (Hough-Space) Ergebnis der Hough-Transformation (Geraden) 164

13 weiterverwendbar für formale Verarbeitung: 165
Detektion von Eckpunkten und einfachen Kurven
 Detektion von Eckpunkten und einfachen Kurven Industrielle Bildverarbeitung, Vorlesung No. 7 1 M. O. Franz 21.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005.
Detektion von Eckpunkten und einfachen Kurven Industrielle Bildverarbeitung, Vorlesung No. 7 1 M. O. Franz 21.11.2007 1 falls nicht anders vermerkt, sind die Abbildungen entnommen aus Burger & Burge, 2005.
Kreis - Tangente. 2. Vorbemerkung: Satz des Thales Eine Möglichkeit zur Bestimmung der Tangente benutzt den Satz des Thales.
 Kreis - Tangente 1. Allgemeines 2. Satz des Thales 3. Tangente an einem Punkt auf dem Kreis 4. Tangente über Analysis (an einem Punkt eines Ursprungkreises) 5. Tangente von einem Punkt (Pol) an den Kreis
Kreis - Tangente 1. Allgemeines 2. Satz des Thales 3. Tangente an einem Punkt auf dem Kreis 4. Tangente über Analysis (an einem Punkt eines Ursprungkreises) 5. Tangente von einem Punkt (Pol) an den Kreis
Lösung zu Serie 2. D-ERDW, D-HEST, D-USYS Dr. Ana Cannas. Mathematik II FS März 2016
 Mathematik II FS 6. März 6 Lösung zu Serie Bemerkung: Die Aufgaben der Serie sind der Fokus der Übungsstunden vom./3. März.. a y = x und es wird die ganze Parabel einmal durchlaufen, denn x nimmt alle
Mathematik II FS 6. März 6 Lösung zu Serie Bemerkung: Die Aufgaben der Serie sind der Fokus der Übungsstunden vom./3. März.. a y = x und es wird die ganze Parabel einmal durchlaufen, denn x nimmt alle
1 Vorlesungen: und Vektor Rechnung: 1.Teil
 1 Vorlesungen: 4.10.005 und 31.10.005 Vektor Rechnung: 1.Teil Einige in der Physik auftretende Messgrößen sind durch eine einzige Zahl bestimmt: Temperatur T K Dichte kg/m 3 Leistung P Watt = J/s = kg
1 Vorlesungen: 4.10.005 und 31.10.005 Vektor Rechnung: 1.Teil Einige in der Physik auftretende Messgrößen sind durch eine einzige Zahl bestimmt: Temperatur T K Dichte kg/m 3 Leistung P Watt = J/s = kg
Vektorgeometrie. 1. Vektoren eingeben, Norm, Skalarprodukt. 2 In einem kartesischen Koordinatensystem sind die Vektoren. , v. und. gegeben.
 Vektorgeometrie 1. Vektoren eingeben, Norm, Skalarprodukt 2 In einem kartesischen Koordinatensystem sind die Vektoren u 14, 5 11 10 v 2 und w 5 gegeben. 10 10 a) Zeigen Sie, dass die Vektoren einen Würfel
Vektorgeometrie 1. Vektoren eingeben, Norm, Skalarprodukt 2 In einem kartesischen Koordinatensystem sind die Vektoren u 14, 5 11 10 v 2 und w 5 gegeben. 10 10 a) Zeigen Sie, dass die Vektoren einen Würfel
Skalarprodukte (Teschl/Teschl Kap. 13)
") Skalarprodukte (Teschl/Teschl Kap. ) Sei V Vektorraum über R. Ein Skalarprodukt auf V ist eine Abbildung V V R, (x, y) x, y mit den Eigenschaften () x, y = y, x (symmetrisch), () ax, y = a x, y und x +
Skalarprodukte (Teschl/Teschl Kap. ) Sei V Vektorraum über R. Ein Skalarprodukt auf V ist eine Abbildung V V R, (x, y) x, y mit den Eigenschaften () x, y = y, x (symmetrisch), () ax, y = a x, y und x +
Ein auf Eigenwertanalyse basierendes Verfahren zur einfachen und robusten Linienerkennung. -erweiterte Web-Präsentation
 Ein auf Eigenwertanalyse basierendes Verfahren zur einfachen und robusten Linienerkennung. -erweiterte Web-Präsentation Jan Rudert Vortrag vom. 05. 2004 Seminar Mustererkennung in Bildern und 3D-Daten
Ein auf Eigenwertanalyse basierendes Verfahren zur einfachen und robusten Linienerkennung. -erweiterte Web-Präsentation Jan Rudert Vortrag vom. 05. 2004 Seminar Mustererkennung in Bildern und 3D-Daten
1.1. Geradengleichung aus Steigung und y-achsenabschnitt
 Version vom 4. Januar 2007 Gleichungen von Geraden in der Ebene 1999 Peter Senn * 1.1. Geradengleichung aus Steigung und y-achsenabschnitt In dieser Form lautet die Gleichung der Geraden wie folgt: g:
Version vom 4. Januar 2007 Gleichungen von Geraden in der Ebene 1999 Peter Senn * 1.1. Geradengleichung aus Steigung und y-achsenabschnitt In dieser Form lautet die Gleichung der Geraden wie folgt: g:
Zusammenfassung Vektorrechnung und Komplexe Zahlen
 Zusammenfassung Vektorrechnung und Komplexe Zahlen Michael Goerz 8. April 006 Inhalt Vektoren, Geraden und Ebenen. Länge eines Vektors.......................... Skalarprodukt..............................
Zusammenfassung Vektorrechnung und Komplexe Zahlen Michael Goerz 8. April 006 Inhalt Vektoren, Geraden und Ebenen. Länge eines Vektors.......................... Skalarprodukt..............................
Vektorprodukt. Satz: Für a, b, c V 3 und λ IR gilt: = a b + a c (Linearität) (Linearität) b = λ
 (Linearität) b = λ") Vektorprodukt Satz: Für a, b, c V 3 und λ IR gilt: 1 a b = b a (Anti-Kommutativität) ( ) 2 a b + c ( 3 a λ ) b = λ = a b + a c (Linearität) ( a ) b (Linearität) Satz: Die Koordinatendarstellung des Vektorprodukts
Vektorprodukt Satz: Für a, b, c V 3 und λ IR gilt: 1 a b = b a (Anti-Kommutativität) ( ) 2 a b + c ( 3 a λ ) b = λ = a b + a c (Linearität) ( a ) b (Linearität) Satz: Die Koordinatendarstellung des Vektorprodukts
Lösungsvorschlag zur 5. Übung zu Multimediale Systeme
 Lösungsvorschlag zur 5. Übung zu Multimediale Systeme Dipl. Inf. Günter Robbert Universität Bayreuth Lehrstuhl für Angewandte Informatik I 20.6.2003 Lösungsvorschlag zur 5. Übung 1 AdOculos (1) AdOculos
Lösungsvorschlag zur 5. Übung zu Multimediale Systeme Dipl. Inf. Günter Robbert Universität Bayreuth Lehrstuhl für Angewandte Informatik I 20.6.2003 Lösungsvorschlag zur 5. Übung 1 AdOculos (1) AdOculos
Analytische Geometrie - Schnittwinkel. u 1, u 2 Richtungsvektoren der Geraden
 Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
Analytische Geometrie - Schnittwinkel. Möglichkeiten und Formeln Gerade / Gerade: cos( ) = u u 2 u u 2 Gerade / Ebene: sin( ) = n u n u Ebene / Ebene: cos( ) = n n 2 n n 2 u, u 2 Richtungsvektoren der
Mathematik - 1. Semester. folgenden Zahlenpaare die gegebene Gleichung erfüllen:
 Mathematik -. Semester Wi. Ein Beispiel Lineare Funktionen Gegeben sei die Gleichung y x + 3. Anhand einer Wertetabelle sehen wir; daß die folgenden Zahlenpaare die gegebene Gleichung erfüllen: x 0 6 8
Mathematik -. Semester Wi. Ein Beispiel Lineare Funktionen Gegeben sei die Gleichung y x + 3. Anhand einer Wertetabelle sehen wir; daß die folgenden Zahlenpaare die gegebene Gleichung erfüllen: x 0 6 8
Mathematische Grundlagen für die Vorlesung. Differentialgeometrie
 Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
a) Im Berührungspunkt müssen die y-werte und die Steigungen übereinstimmen:
 Im Berührungspunkt müssen die y-werte und die Steigungen übereinstimmen:") . ANALYSIS Gegeben ist die kubische Parabel f: y = x 3 6x + 8x + a) Die Gerade g: y = k x + berührt die Parabel an der Stelle x = x 0 > 0. Bestimmen Sie den Parameter k. b) Berechnen Sie den Inhalt der
. ANALYSIS Gegeben ist die kubische Parabel f: y = x 3 6x + 8x + a) Die Gerade g: y = k x + berührt die Parabel an der Stelle x = x 0 > 0. Bestimmen Sie den Parameter k. b) Berechnen Sie den Inhalt der
Vorkurs Mathematik Intensiv. Vektoren, Skalarprodukte und Geraden in der Ebene Musterlösung
 Prof. Dr. J. Dorfmeister und Tutoren Vorkurs Mathematik Intensiv TU München WS 06/07 Vektoren, Skalarprodukte und Geraden in der Ebene Musterlösung Skalarprodukt, Kreuzprodukt, Norm Seien x, y R mit x
Prof. Dr. J. Dorfmeister und Tutoren Vorkurs Mathematik Intensiv TU München WS 06/07 Vektoren, Skalarprodukte und Geraden in der Ebene Musterlösung Skalarprodukt, Kreuzprodukt, Norm Seien x, y R mit x
Grundwissen Abitur Geometrie 15. Juli 2012
 Grundwissen Abitur Geometrie 5. Juli 202. Erkläre die Begriffe (a) parallelgleiche Pfeile (b) Vektor (c) Repräsentant eines Vektors (d) Gegenvektor eines Vektors (e) Welcher geometrische Zusammenhang besteht
Grundwissen Abitur Geometrie 5. Juli 202. Erkläre die Begriffe (a) parallelgleiche Pfeile (b) Vektor (c) Repräsentant eines Vektors (d) Gegenvektor eines Vektors (e) Welcher geometrische Zusammenhang besteht
Übungsblatt 1: Lösungswege und Lösungen
 Übungsblatt : Lösungswege und Lösungen 5..6 ) Hier geht es weniger um mathematisch-strenge Beweise als darum, mit abstrakten Vektoren ohne Komponenten) zu hantieren und damit die Behauptungen plausibel
Übungsblatt : Lösungswege und Lösungen 5..6 ) Hier geht es weniger um mathematisch-strenge Beweise als darum, mit abstrakten Vektoren ohne Komponenten) zu hantieren und damit die Behauptungen plausibel
GRUNDLAGEN MATHEMATIK
 Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik GRUNDLAGEN MATHEMATIK 1. Vektorrechnung und Geometrie Prof. Dr. Gunar Matthies Wintersemester 2015/16 G. Matthies
Mathematik und Naturwissenschaften Fachrichtung Mathematik, Institut für Numerische Mathematik GRUNDLAGEN MATHEMATIK 1. Vektorrechnung und Geometrie Prof. Dr. Gunar Matthies Wintersemester 2015/16 G. Matthies
Kapitel VI. Euklidische Geometrie
 Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kurzskript zur Vorlesung Mathematik I für MB, WI/MB und andere Prof. Dr. Ulrich Reif
 14 Oktober 2008 1 Kurzskript zur Vorlesung Mathematik I für MB, WI/MB und andere Prof Dr Ulrich Reif Inhalt: 1 Vektorrechnung 2 Lineare Gleichungssysteme 3 Matrizenrechnung 4 Lineare Abbildungen 5 Eigenwerte
14 Oktober 2008 1 Kurzskript zur Vorlesung Mathematik I für MB, WI/MB und andere Prof Dr Ulrich Reif Inhalt: 1 Vektorrechnung 2 Lineare Gleichungssysteme 3 Matrizenrechnung 4 Lineare Abbildungen 5 Eigenwerte
Lernkarten. Analytische Geometrie. 6 Seiten
 Lernkarten Analytische Geometrie 6 Seiten Zum Ausdrucken muss man jeweils eine Vorderseite drucken, dann das Blatt wenden, nochmals einlegen und die Rückseite drucken. Am besten druckt man die Karten auf
Lernkarten Analytische Geometrie 6 Seiten Zum Ausdrucken muss man jeweils eine Vorderseite drucken, dann das Blatt wenden, nochmals einlegen und die Rückseite drucken. Am besten druckt man die Karten auf
Modellbasierte Segmentierung
 Modellbasierte Segmentierung -----Vollständige Suche Template Matching, Hough Transformation für die Suche in Bilddatenbeständen Proseminararbeit im Proseminar Bildverarbeitung Wintersemester 2005/06 Fakultät
Modellbasierte Segmentierung -----Vollständige Suche Template Matching, Hough Transformation für die Suche in Bilddatenbeständen Proseminararbeit im Proseminar Bildverarbeitung Wintersemester 2005/06 Fakultät
entspricht der Länge des Vektorpfeils. Im R 2 : x =
 Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
Erinnerung an die "Bildanalyse- (Bildverarbeitungs-) Pipeline":
 Pipeline:") 4. Segmentierung Erinnerung an die "Bildanalyse- (Bildverarbeitungs-) Pipeline": Segmentierung: Vorgang, das Bild in sinnvolle Bildteile aufzuteilen (es zu segmentieren) "Fernziel": Objekterkennung; Trennung
4. Segmentierung Erinnerung an die "Bildanalyse- (Bildverarbeitungs-) Pipeline": Segmentierung: Vorgang, das Bild in sinnvolle Bildteile aufzuteilen (es zu segmentieren) "Fernziel": Objekterkennung; Trennung
Normalengleichungen. Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b,
 Normalengleichungen Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b, Normalengleichungen 1-1 Normalengleichungen Für eine beliebige
Normalengleichungen Für eine beliebige m n Matrix A erfüllt jede Lösung x des Ausgleichsproblems Ax b min die Normalengleichungen A t Ax = A t b, Normalengleichungen 1-1 Normalengleichungen Für eine beliebige
gegeben: G sei endliche Gruppe, jede Untergruppe von G sei ein Normalteiler zu zeigen: je zwei Elemente teilerfremder Ordnung kommutieren
 Stefan K. 4.Übungsblatt Algebra I Aufgabe 1 gegeben: G sei endliche Gruppe, jede Untergruppe von G sei ein Normalteiler von G zu zeigen: je zwei Elemente teilerfremder Ordnung kommutieren Beweis: Seien
Stefan K. 4.Übungsblatt Algebra I Aufgabe 1 gegeben: G sei endliche Gruppe, jede Untergruppe von G sei ein Normalteiler von G zu zeigen: je zwei Elemente teilerfremder Ordnung kommutieren Beweis: Seien
Analytische Geometrie Aufgaben und Lösungen
 Analytische Geometrie Aufgaben und Lösungen http://www.fersch.de Klemens Fersch. Januar Inhaltsverzeichnis Punkte:Vektor - Abstand - Steigung - Mittelpunkt. Aufgaben....................................................
Analytische Geometrie Aufgaben und Lösungen http://www.fersch.de Klemens Fersch. Januar Inhaltsverzeichnis Punkte:Vektor - Abstand - Steigung - Mittelpunkt. Aufgaben....................................................
Zusammenfassung der Analytischen Geometrie
 Zusammenfassung der Analytischen Geometrie 1. Rechnen mit Vektoren (Addition, Subtraktion, S-Multiplikation, Linearkombinationen) 1. Gegeben sind die Punkte A(2-6 ) und B(-1 14-4), 4 4 sowie die Vektoren
Zusammenfassung der Analytischen Geometrie 1. Rechnen mit Vektoren (Addition, Subtraktion, S-Multiplikation, Linearkombinationen) 1. Gegeben sind die Punkte A(2-6 ) und B(-1 14-4), 4 4 sowie die Vektoren
14 Skalarprodukt Abstände und Winkel
 4 Skalarprodukt Abstände und Winkel Um Abstände und Winkel zu definieren benötigen wir einen neuen Begriff. Zunächst untersuchen wir die Länge eines Vektors v. Wir schreiben dafür v und sprechen auch von
4 Skalarprodukt Abstände und Winkel Um Abstände und Winkel zu definieren benötigen wir einen neuen Begriff. Zunächst untersuchen wir die Länge eines Vektors v. Wir schreiben dafür v und sprechen auch von
DEUTSCHE SCHULE MONTEVIDEO BIKULTURELLES DEUTSCH-URUGUAYISCHES ABITUR ( AUF SPANISCH )
") Grundlegende Bemerkungen : Der Begriff des Vektors wurde in den vergangenen Jahren im Geometrieunterricht eingeführt und das mathematische Modell des Vektors wurde vor allem auch im Physikunterricht schon
Grundlegende Bemerkungen : Der Begriff des Vektors wurde in den vergangenen Jahren im Geometrieunterricht eingeführt und das mathematische Modell des Vektors wurde vor allem auch im Physikunterricht schon
Parallele Algorithmen in der Bildverarbeitung
 Seminar über Algorithmen - SoSe 2009 Parallele Algorithmen in der Bildverarbeitung von Christopher Keiner 1 Allgemeines 1.1 Einleitung Parallele Algorithmen gewinnen immer stärker an Bedeutung. Es existieren
Seminar über Algorithmen - SoSe 2009 Parallele Algorithmen in der Bildverarbeitung von Christopher Keiner 1 Allgemeines 1.1 Einleitung Parallele Algorithmen gewinnen immer stärker an Bedeutung. Es existieren
Ebenen in Normalenform
 Ebenen in Normalenform Normalenvektoren und Einheitsvektoren Definition Normalenvektor Ein Normalenvektor einer Ebene ist ein Vektor, der senkrecht auf einer Ebene steht (siehe Seite 12). Berechnung eines
Ebenen in Normalenform Normalenvektoren und Einheitsvektoren Definition Normalenvektor Ein Normalenvektor einer Ebene ist ein Vektor, der senkrecht auf einer Ebene steht (siehe Seite 12). Berechnung eines
Lernunterlagen Vektoren in R 2
 Die Menge aller reellen Zahlen wird mit R bezeichnet, die Menge aller Paare a 1 a 2 reeller Zahlen wird mit R 2 bezeichnet. Definition der Menge R 2 : R 2 { a 1 a 2 a 1, a 2 R} Ein Zahlenpaar a 1 a 2 bezeichnet
Die Menge aller reellen Zahlen wird mit R bezeichnet, die Menge aller Paare a 1 a 2 reeller Zahlen wird mit R 2 bezeichnet. Definition der Menge R 2 : R 2 { a 1 a 2 a 1, a 2 R} Ein Zahlenpaar a 1 a 2 bezeichnet
Vektoren. Kapitel 13 Vektoren. Mathematischer Vorkurs TU Dortmund Seite 114 / 1
 Vektoren Kapitel 13 Vektoren Mathematischer Vorkurs TU Dortmund Seite 114 / 1 Vektoren 131 Denition: Vektoren im Zahlenraum Ein Vektor (im Zahlenraum) mit n Komponenten ist ein n-tupel reeller Zahlen,
Vektoren Kapitel 13 Vektoren Mathematischer Vorkurs TU Dortmund Seite 114 / 1 Vektoren 131 Denition: Vektoren im Zahlenraum Ein Vektor (im Zahlenraum) mit n Komponenten ist ein n-tupel reeller Zahlen,
03. Vektoren im R 2, R 3 und R n
 03 Vektoren im R 2, R 3 und R n Unter Verwendung eines Koordinatensystems kann jedem Punkt der Ebene umkehrbar eindeutig ein Zahlenpaar (x, y) zugeordnet werden P (x, y) Man nennt x und y die kartesischen
03 Vektoren im R 2, R 3 und R n Unter Verwendung eines Koordinatensystems kann jedem Punkt der Ebene umkehrbar eindeutig ein Zahlenpaar (x, y) zugeordnet werden P (x, y) Man nennt x und y die kartesischen
Übersicht zur Vorlesung
 Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
Anwendungsaufgaben zur Vektorrechnung (Abstände bestimmen)
") Anwendungsaufgaben zur Vektorrechnung (Abstände bestimmen) 1) a) Ein Flugzeug fliegt von A(4; 2; 5) nach B(12; 6; 10). In S(10; 10; 4,75) befindet sich die Spitze eines Berges. Wie weit fliegt das Flugzeug
Anwendungsaufgaben zur Vektorrechnung (Abstände bestimmen) 1) a) Ein Flugzeug fliegt von A(4; 2; 5) nach B(12; 6; 10). In S(10; 10; 4,75) befindet sich die Spitze eines Berges. Wie weit fliegt das Flugzeug
Mathematik I (MATHE1) Klausuren lineare Algebra & analytische Geometrie
 Klausuren lineare Algebra & analytische Geometrie") Mathematik I (MATHE1) Klausuren lineare Algebra & analytische Geometrie Prof. Dr. Thomas Risse www.weblearn.hs-bremen.de/risse/mai www.weblearn.hs-bremen.de/risse/mai/docs Fakultät Elektrotechnik & Informatik
Mathematik I (MATHE1) Klausuren lineare Algebra & analytische Geometrie Prof. Dr. Thomas Risse www.weblearn.hs-bremen.de/risse/mai www.weblearn.hs-bremen.de/risse/mai/docs Fakultät Elektrotechnik & Informatik
Analytische Geometrie des Raumes
 Analytische Geometrie des Raumes Als Begründer der analytischen Geometrie gilt René Descartes (Discours de la méthode). Seine grundliegende Idee bestand darin, geometrische Gebilde (Gerade, Kreis, Ellipse
Analytische Geometrie des Raumes Als Begründer der analytischen Geometrie gilt René Descartes (Discours de la méthode). Seine grundliegende Idee bestand darin, geometrische Gebilde (Gerade, Kreis, Ellipse
ein geeignetes Koordinatensystem zu verwenden.
 1.13 Koordinatensysteme (Anwendungen) Man ist immer bemüht, für die mathematische Beschreibung einer wissenschaftlichen Aufgabe ( Chemie, Biologie,Physik ) ein geeignetes Koordinatensystem zu verwenden.
1.13 Koordinatensysteme (Anwendungen) Man ist immer bemüht, für die mathematische Beschreibung einer wissenschaftlichen Aufgabe ( Chemie, Biologie,Physik ) ein geeignetes Koordinatensystem zu verwenden.
Pflichtteil Wahlteil Analysis Wahlteil Analysis Wahlteil Analysis Wahlteil Analytische Geometrie 1...
 Pflichtteil Wahlteil Analysis 8 Wahlteil Analysis Wahlteil Analysis 9 Wahlteil Analytische Geometrie Wahlteil Analytische Geometrie 9 Lösungen: Pflichtteil Lösungen zur Prüfung : Pflichtteil Benötigte
Pflichtteil Wahlteil Analysis 8 Wahlteil Analysis Wahlteil Analysis 9 Wahlteil Analytische Geometrie Wahlteil Analytische Geometrie 9 Lösungen: Pflichtteil Lösungen zur Prüfung : Pflichtteil Benötigte
03. Vektoren im R 2, R 3 und R n
 03 Vektoren im R 2, R 3 und R n Unter Verwendung eines Koordinatensystems kann jedem Punkt der Ebene umkehrbar eindeutig ein Zahlenpaar (x, y) zugeordnet werden P (x, y) Man nennt x und y die kartesischen
03 Vektoren im R 2, R 3 und R n Unter Verwendung eines Koordinatensystems kann jedem Punkt der Ebene umkehrbar eindeutig ein Zahlenpaar (x, y) zugeordnet werden P (x, y) Man nennt x und y die kartesischen
Segmentierung 1 Segmentation
 Segmentierung Segmentation M. Thaler, TG08 tham@zhaw.ch Juni 7 Um was geht es? Bis jetzt vor allem Transformation Bild Bild Neu Transformation Bild? Feature, Aussage, etc. Bild Aussage "it's a circle"
Segmentierung Segmentation M. Thaler, TG08 tham@zhaw.ch Juni 7 Um was geht es? Bis jetzt vor allem Transformation Bild Bild Neu Transformation Bild? Feature, Aussage, etc. Bild Aussage "it's a circle"
Klasse WI06b MLAN2 zweite-klausur 13. Juni 2007
 Klasse WI6b MLAN zweite-klausur 3. Juni 7 Name: Aufgabe Gegeben sind die beiden harmonischen Schwingungen ( y = f (t) = +3 sin ωt + π ) (), ( 4 y = f (t) = 8 cos ωt + π ) (). 4 a) Bestimmen Sie mit Hilfe
Klasse WI6b MLAN zweite-klausur 3. Juni 7 Name: Aufgabe Gegeben sind die beiden harmonischen Schwingungen ( y = f (t) = +3 sin ωt + π ) (), ( 4 y = f (t) = 8 cos ωt + π ) (). 4 a) Bestimmen Sie mit Hilfe
Lineare Funktionen. Das rechtwinklige (kartesische) Koordinatensystem. Funktionen
 Koordinatensystem. Funktionen") Das rechtwinklige (kartesische) Koordinatensystem Funktionen Funktion: Eine Funktion ist eine eindeutige Zuordnung. Jedem x D wird genau eine reelle Zahl zugeordnet. Schreibweise: Funktion: f: x f (x)
Das rechtwinklige (kartesische) Koordinatensystem Funktionen Funktion: Eine Funktion ist eine eindeutige Zuordnung. Jedem x D wird genau eine reelle Zahl zugeordnet. Schreibweise: Funktion: f: x f (x)
3. Übungsblatt Aufgaben mit Lösungen
 . Übungsblatt Aufgaben mit Lösungen Aufgabe : Gegeben sind zwei Teilmengen von R : E := {x R : x x = }, und F ist eine Ebene durch die Punkte A = ( ), B = ( ) und C = ( ). (a) Stellen Sie diese Mengen
. Übungsblatt Aufgaben mit Lösungen Aufgabe : Gegeben sind zwei Teilmengen von R : E := {x R : x x = }, und F ist eine Ebene durch die Punkte A = ( ), B = ( ) und C = ( ). (a) Stellen Sie diese Mengen
Übungsblatt Analytische Geometrie - Geraden und Ebenen - 6C /07
 Übungsblatt Analytische Geometrie - Geraden und Ebenen - 6C - 6/7. Gegenseitige Lage von Geraden Gesucht ist die gegenseitige Lage der Geraden g durch die beiden Punkte A( ) und B( 5 9 ) und der Geraden
Übungsblatt Analytische Geometrie - Geraden und Ebenen - 6C - 6/7. Gegenseitige Lage von Geraden Gesucht ist die gegenseitige Lage der Geraden g durch die beiden Punkte A( ) und B( 5 9 ) und der Geraden
Pflichtteilaufgaben zu Gegenseitige Lage, Abstand, Baden-Württemberg
 Pflichtteilaufgaben zu Gegenseitige Lage, Abstand, Baden-Württemberg Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz wwwmathe-aufgabencom September 6 Abituraufgaben (Haupttermin) Aufgabe
Pflichtteilaufgaben zu Gegenseitige Lage, Abstand, Baden-Württemberg Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz wwwmathe-aufgabencom September 6 Abituraufgaben (Haupttermin) Aufgabe
13. Klasse TOP 10 Grundwissen 13 Geradengleichungen 01
 . Klasse TOP 0 Grundwissen Geradengleichungen 0 Punkt-Richtungs-Form Geraden sind gegeben durch einen Aufpunkt A (mit Ortsvektor a) auf der Geraden und einen Richtungsvektor u: x = a + λ u, λ IR. (Interpretation:
. Klasse TOP 0 Grundwissen Geradengleichungen 0 Punkt-Richtungs-Form Geraden sind gegeben durch einen Aufpunkt A (mit Ortsvektor a) auf der Geraden und einen Richtungsvektor u: x = a + λ u, λ IR. (Interpretation:
MATHEMATIK G10. (1) Bestimme die Gleichung der Geraden durch die beiden Punkte
 Bestimme die Gleichung der Geraden durch die beiden Punkte") (c) A( 1 1 ) geht. 1 MATHEMATIK G10 GERADEN (1) Bestimme die Gleichung der Geraden durch die beiden Punkte P und Q: a) P ( 5), Q(4 7) b) P (3 11), Q(3, 1) c) P (3 5), Q( 1 7) d) P ( 0), Q(0 3) e) P (3
(c) A( 1 1 ) geht. 1 MATHEMATIK G10 GERADEN (1) Bestimme die Gleichung der Geraden durch die beiden Punkte P und Q: a) P ( 5), Q(4 7) b) P (3 11), Q(3, 1) c) P (3 5), Q( 1 7) d) P ( 0), Q(0 3) e) P (3
Skalarprodukt und Orthogonalität
 Skalarprodukt und Orthogonalität Skalarprodukt und Orthogonalität in R n Wir erinnern an das euklidische Skalarprodukt im R 2 : Wir erinnern an das euklidische Skalarprodukt im R 2 : < a, b >:= α 1 β 1
Skalarprodukt und Orthogonalität Skalarprodukt und Orthogonalität in R n Wir erinnern an das euklidische Skalarprodukt im R 2 : Wir erinnern an das euklidische Skalarprodukt im R 2 : < a, b >:= α 1 β 1
Formelsammlung Analytische Geometrie
 Formelsammlung Analytische Geometrie http://www.fersch.de Klemens Fersch 6. August 6 Inhaltsverzeichnis 6 Analytische Geometrie 6. Vektorrechung in der Ebene......................................... 6..
Formelsammlung Analytische Geometrie http://www.fersch.de Klemens Fersch 6. August 6 Inhaltsverzeichnis 6 Analytische Geometrie 6. Vektorrechung in der Ebene......................................... 6..
Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.2/29
 Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
Dynamische Systeme und Zeitreihenanalyse Komplexe Zahlen Kapitel 3 Statistik und Mathematik WU Wien Michael Hauser Dynamische Systeme und Zeitreihenanalyse // Komplexe Zahlen 3 p.0/29 Motivation Für die
Kapitel 3. Transformationen
 Oyun Namdag Am 08.11.2007 WS 07/08 Proseminar Numerik: Mathematics for 3D game programming & computer graphics Dozenten: Prof. Dr. V. Schulz, C. Schillings Universität Trier Kapitel 3 Transformationen
Oyun Namdag Am 08.11.2007 WS 07/08 Proseminar Numerik: Mathematics for 3D game programming & computer graphics Dozenten: Prof. Dr. V. Schulz, C. Schillings Universität Trier Kapitel 3 Transformationen
ÜBUNGSBLATT 3 LÖSUNGEN MAT121/MAT131 ANALYSIS I HERBSTSEMESTER 2010 PROF. DR. CAMILLO DE LELLIS
 ÜBUNGSBLATT 3 LÖSUNGEN MAT121/MAT131 ANALYSIS I HERBSTSEMESTER 2010 PROF. DR. CAMILLO DE LELLIS Aufgabe 1. a) Beweisen Sie aus den Axiomen für komplexe Zahlen, dass für alle z, w C gilt: zw = z w; b) Schreiben
ÜBUNGSBLATT 3 LÖSUNGEN MAT121/MAT131 ANALYSIS I HERBSTSEMESTER 2010 PROF. DR. CAMILLO DE LELLIS Aufgabe 1. a) Beweisen Sie aus den Axiomen für komplexe Zahlen, dass für alle z, w C gilt: zw = z w; b) Schreiben
2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n
![2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n](/thumbs/49/25862272.jpg "2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n") 2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n f ist in dem Fall ein Weg in R n. Das Bild f(t) des Weges wird als Kurve
2. VEKTORANALYSIS 2.1 Kurven Definition: Ein Weg ist eine stetige Abbildung aus einem Intervall I = [a; b] R in den R n : f : I R n f ist in dem Fall ein Weg in R n. Das Bild f(t) des Weges wird als Kurve
12 Übungen zu Gauß-Algorithmus
 Aufgaben zum Vorkurs B S. 2 Übungen zu Gauß-Algorithmus 2x x 2 = 7x +, 5x 2 = 7 Aufgabe 6: Aufgabe 7: Aufgabe 8: Aufgabe 9: 2x x 2 = x +2x 2 = 2 2x x 2 = 7x +, 5x 2 =, 5 x 2x 2 = x +x 2 = 5 2x +x 2 = 4
Aufgaben zum Vorkurs B S. 2 Übungen zu Gauß-Algorithmus 2x x 2 = 7x +, 5x 2 = 7 Aufgabe 6: Aufgabe 7: Aufgabe 8: Aufgabe 9: 2x x 2 = x +2x 2 = 2 2x x 2 = 7x +, 5x 2 =, 5 x 2x 2 = x +x 2 = 5 2x +x 2 = 4
Krummlinige Koordinaten
 Krummlinige Koordinaten Einige Koordinatensysteme im R 3 haben wir bereits kennengelernt : x, x 2, x 3... kartesische Koordinaten r, φ, x 3... Zylinderkoordinaten r, φ, ϑ... Kugelkoordinaten Sind andere
Krummlinige Koordinaten Einige Koordinatensysteme im R 3 haben wir bereits kennengelernt : x, x 2, x 3... kartesische Koordinaten r, φ, x 3... Zylinderkoordinaten r, φ, ϑ... Kugelkoordinaten Sind andere
Serie 9: Der Satz von Green und Parametrisierungen von Flächen im Raum
 : Der Satz von Green und Parametrisierungen von Flächen im Raum Bemerkung: Die Aufgaben der sind der Fokus der Übungsstunden vom 6./8. April.. Überprüfung des Satzes von Green Der Satz von Green besagt
: Der Satz von Green und Parametrisierungen von Flächen im Raum Bemerkung: Die Aufgaben der sind der Fokus der Übungsstunden vom 6./8. April.. Überprüfung des Satzes von Green Der Satz von Green besagt
1 Mathematische Hilfsmittel
 Mathematische Hilfsmittel. Vektoranalysis Wiederholung Vektor: Länge und Richtung Vektoraddition: A + B = B + A (A + B) + C = A + (B + C) kartesische Koordinaten: B A + B = i (a i + b i )e i A+B Multiplikation
Mathematische Hilfsmittel. Vektoranalysis Wiederholung Vektor: Länge und Richtung Vektoraddition: A + B = B + A (A + B) + C = A + (B + C) kartesische Koordinaten: B A + B = i (a i + b i )e i A+B Multiplikation
Kapitel 3: Geometrische Transformationen
 [ Computeranimation ] Kapitel 3: Geometrische Transformationen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 3. Geometrische Transformationen
[ Computeranimation ] Kapitel 3: Geometrische Transformationen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 3. Geometrische Transformationen
Das Wort Vektor kommt aus dem lateinischen und heißt so viel wie "Träger" oder "Fahrer".
 Was ist ein Vektor? Das Wort Vektor kommt aus dem lateinischen und heißt so viel wie "Träger" oder "Fahrer". Vektoren sind Listen von Zahlen. Man kann einen Vektor darstellen, indem man seine Komponenten
Was ist ein Vektor? Das Wort Vektor kommt aus dem lateinischen und heißt so viel wie "Träger" oder "Fahrer". Vektoren sind Listen von Zahlen. Man kann einen Vektor darstellen, indem man seine Komponenten
5. Wie bringt man einen Vektor auf eine gewünschte Länge? Zuerst bringt man ihn auf die Länge 1, dann multipliziert man mit der gewünschten Länge.
 1. Definition von drei Vektoren sind l.u. 2. Wie überprüft man 3 Vektoren mit Hilfe eines LGS auf lineare Unabhängigkeit? 3. Definition von Basis?... wenn sich der Nullvektor nur als triviale LK darstellen
1. Definition von drei Vektoren sind l.u. 2. Wie überprüft man 3 Vektoren mit Hilfe eines LGS auf lineare Unabhängigkeit? 3. Definition von Basis?... wenn sich der Nullvektor nur als triviale LK darstellen
(x 1. Vektoren. g: x = p + r u. p r (u1. x 2. u 2. p 2
 Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
Mathematischer Vorkurs für Physiker WS 2012/13
 TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13 Übungsblatt 2 Wichtige Formeln aus der Vorlesung: Basisaufgaben Beispiel 1: 1 () grad () = 2 (). () () = ( 0 ) + grad ( 0 ) ( 0 )+
TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13 Übungsblatt 2 Wichtige Formeln aus der Vorlesung: Basisaufgaben Beispiel 1: 1 () grad () = 2 (). () () = ( 0 ) + grad ( 0 ) ( 0 )+
Denition 6.1 Eine Gerade ist die Menge aller Losungen (x; y) einer linearen Gleichung. y = A B x + C B : Ax + By = C mit 6= 0
 einer linearen Gleichung. y = A B x + C B : Ax + By = C mit 6= 0") 6 Der Vektorraum R n In den folgenden Wochen wenden wir uns der Linearen Algebra zu, die man als eine abstrakte Form des Rechnens mit Vektoren auassen kann. Ein zentrales Thema werden lineare Raume (=
6 Der Vektorraum R n In den folgenden Wochen wenden wir uns der Linearen Algebra zu, die man als eine abstrakte Form des Rechnens mit Vektoren auassen kann. Ein zentrales Thema werden lineare Raume (=
Mathematischer Vorkurs Lösungen zum Übungsblatt 5
 Mathematischer Vorkurs Lösungen zum Übungsblatt 5 Prof. Dr. Norbert Pietralla/Sommersemester 2012 c.v.meister@skmail.ikp.physik.tu-darmstadt.de Aufgabe 1: Berechnen Sie den Abstand d der Punkte P 1 und
Mathematischer Vorkurs Lösungen zum Übungsblatt 5 Prof. Dr. Norbert Pietralla/Sommersemester 2012 c.v.meister@skmail.ikp.physik.tu-darmstadt.de Aufgabe 1: Berechnen Sie den Abstand d der Punkte P 1 und
1 Ableitungen. Definition: Eine Kurve ist eine Abbildung γ : I R R n, γ besteht also aus seinen Komponentenfunktionen. a 1 + tx 1. eine Kurve.
 1 Ableitungen Definition: Eine Kurve ist eine Abbildung γ : I R R n, γ besteht also aus seinen Komponentenfunktionen γ 1 (t) γ(t) = γ n (t) Bild(γ) = {γ(t) t I} heißt auch die Spur der Kurve Beispiel:1)
1 Ableitungen Definition: Eine Kurve ist eine Abbildung γ : I R R n, γ besteht also aus seinen Komponentenfunktionen γ 1 (t) γ(t) = γ n (t) Bild(γ) = {γ(t) t I} heißt auch die Spur der Kurve Beispiel:1)
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.21 2017/05/13 16:28:55 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
$Id: vektor.tex,v 1.21 2017/05/13 16:28:55 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
Abiturprüfung Mathematik 2017 Baden-Württemberg Allgemeinbildende Gymnasien Wahlteil Analysis A 2 Lösungen der Aufgaben A 2.1 und A 2.
 1 Abiturprüfung Mathematik 2017 Baden-Württemberg Allgemeinbildende Gymnasien Wahlteil Analysis A 2 Lösungen der Aufgaben A 2.1 und A 2.2 klaus_messner@web.de www.elearning-freiburg.de 2 Aufgabe A 2.1
1 Abiturprüfung Mathematik 2017 Baden-Württemberg Allgemeinbildende Gymnasien Wahlteil Analysis A 2 Lösungen der Aufgaben A 2.1 und A 2.2 klaus_messner@web.de www.elearning-freiburg.de 2 Aufgabe A 2.1
3 Vektoren. 3.1 Kartesische Koordinaten in Ebene und Raum. Höhere Mathematik 60
 Kartesische Koordinaten in Ebene und Raum 3 Vektoren 3.1 Kartesische Koordinaten in Ebene und Raum In der Ebene (mathematisch ist dies die Menge R 2 ) ist ein kartesisches Koordinatensystem festgelegt
Kartesische Koordinaten in Ebene und Raum 3 Vektoren 3.1 Kartesische Koordinaten in Ebene und Raum In der Ebene (mathematisch ist dies die Menge R 2 ) ist ein kartesisches Koordinatensystem festgelegt
Featurebasierte 3D Modellierung
 1 Featurebasierte 3D Modellierung Moderne 3D arbeiten häufig mit einer Feature Modellierung. Hierbei gibt es eine Reihe von vordefinierten Konstruktionen, die der Reihe nach angewandt werden. Diese Basis
1 Featurebasierte 3D Modellierung Moderne 3D arbeiten häufig mit einer Feature Modellierung. Hierbei gibt es eine Reihe von vordefinierten Konstruktionen, die der Reihe nach angewandt werden. Diese Basis
3. Analyse der Kamerabewegung Video - Inhaltsanalyse
 3. Analyse der Kamerabewegung Video - Inhaltsanalyse Stephan Kopf Bewegungen in Videos Objektbewegungen (object motion) Kameraoperationen bzw. Kamerabewegungen (camera motion) Semantische Informationen
3. Analyse der Kamerabewegung Video - Inhaltsanalyse Stephan Kopf Bewegungen in Videos Objektbewegungen (object motion) Kameraoperationen bzw. Kamerabewegungen (camera motion) Semantische Informationen
Orthonormalbasis. Orthogonalentwicklung
 Orthonormalbasis Eine Orthogonal- oder Orthonormalbasis des R n (oder eines Teilraums) ist eine Basis {v,..., v n } mit v i = und v i, v j = für i j, d. h. alle Basisvektoren haben Norm und stehen senkrecht
Orthonormalbasis Eine Orthogonal- oder Orthonormalbasis des R n (oder eines Teilraums) ist eine Basis {v,..., v n } mit v i = und v i, v j = für i j, d. h. alle Basisvektoren haben Norm und stehen senkrecht
Lösung Arbeitsblatt Vektoren
 Fachhochschule Nordwestschweiz FHNW Hochschule für Technik Institut für Mathematik und Naturwissenschaften IMN Dozent: - Brückenkurs Mathematik Lösung Arbeitsblatt Vektoren Modul: Mathematik Datum:. Aufgabe
Fachhochschule Nordwestschweiz FHNW Hochschule für Technik Institut für Mathematik und Naturwissenschaften IMN Dozent: - Brückenkurs Mathematik Lösung Arbeitsblatt Vektoren Modul: Mathematik Datum:. Aufgabe
7.1.2 Lineare Funktionen Schnittpunkte mit den Achsen - Lösungen
 7.. Lineare Funktionen Schnittpunkte mit den Achsen - Lösungen. Bestimme von den nachfolgenden Funktionsgleichungen zunächst die Schnittpunkte mit den Achsen; stelle sie danach im Koordinatensystem dar.
7.. Lineare Funktionen Schnittpunkte mit den Achsen - Lösungen. Bestimme von den nachfolgenden Funktionsgleichungen zunächst die Schnittpunkte mit den Achsen; stelle sie danach im Koordinatensystem dar.
Vorlesung: Analysis II für Ingenieure. Wintersemester 07/08. Michael Karow. Themen: Koordinatensysteme, klassische Differentialoperatoren
 Vorlesung: Analsis II für Ingenieure Wintersemester 07/08 Michael Karow Themen: Koordinatenssteme, klassische Differentialoperatoren Polarkoordinaten = cos() = sin() = 2 + 2 =(,) tan() = für 0. Winkel
Vorlesung: Analsis II für Ingenieure Wintersemester 07/08 Michael Karow Themen: Koordinatenssteme, klassische Differentialoperatoren Polarkoordinaten = cos() = sin() = 2 + 2 =(,) tan() = für 0. Winkel
Lineare Algebra. Mathematik II für Chemiker. Daniel Gerth
 Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
Kursstufe K
 Kursstufe K 6..6 Schreiben Sie die Ergebnisse bitte kurz unter die jeweiligen Aufgaben, lösen Sie die Aufgaben auf einem separaten Blatt. Aufgabe : Berechnen Sie das Integral Lösungsvorschlag : exp(3x
Kursstufe K 6..6 Schreiben Sie die Ergebnisse bitte kurz unter die jeweiligen Aufgaben, lösen Sie die Aufgaben auf einem separaten Blatt. Aufgabe : Berechnen Sie das Integral Lösungsvorschlag : exp(3x
Durch Ausmultiplizieren von Gleichung (1) erhält man eine Gleichung der Form
 erhält man eine Gleichung der Form") 9 9. Der Kreis 9. Die Koordinaten- und Paraeterfor der Kreisgleichung Def. Unter de Kreis k it Mittelpunkt M(u,v) und adius versteht an die Menge aller Punkte P(x,y) die von M den Abstand haben, für die
9 9. Der Kreis 9. Die Koordinaten- und Paraeterfor der Kreisgleichung Def. Unter de Kreis k it Mittelpunkt M(u,v) und adius versteht an die Menge aller Punkte P(x,y) die von M den Abstand haben, für die
Inhaltsverzeichnis Bausteine Analytische Geometrie
 Graf-Zeppelin-Gmnasium Bausteine Analtische Geometrie Inhaltsvereichnis Bausteine Analtische Geometrie Umgang mit Vektoren1 Länge von Vektoren1 Winkel φ wischen wei Vektoren1 Normale u wei (linear unabhängigen)
Graf-Zeppelin-Gmnasium Bausteine Analtische Geometrie Inhaltsvereichnis Bausteine Analtische Geometrie Umgang mit Vektoren1 Länge von Vektoren1 Winkel φ wischen wei Vektoren1 Normale u wei (linear unabhängigen)
Kapitel 16 Skalar- und Vektorprodukt
 Kapitel 16 Skalar- und Vektorprodukt Mathematischer Vorkurs TU Dortmund Seite 210 / 246 Bisher hatten wir die Möglichkeit Vektoren des Vektoren mit rellen Zahlen zu multiplizieren. n zu addieren und Man
Kapitel 16 Skalar- und Vektorprodukt Mathematischer Vorkurs TU Dortmund Seite 210 / 246 Bisher hatten wir die Möglichkeit Vektoren des Vektoren mit rellen Zahlen zu multiplizieren. n zu addieren und Man
Pflichtteil Wahlteil Analysis Wahlteil Analysis Wahlteil Analysis Wahlteil Analytische Geometrie 1...
 Pflichtteil... Wahlteil Analysis... 7 Wahlteil Analysis... Wahlteil Analysis... Wahlteil Analytische Geometrie... 9 Wahlteil Analytische Geometrie... 008 Pflichtteil Lösungen zur Prüfung 008: Pflichtteil
Pflichtteil... Wahlteil Analysis... 7 Wahlteil Analysis... Wahlteil Analysis... Wahlteil Analytische Geometrie... 9 Wahlteil Analytische Geometrie... 008 Pflichtteil Lösungen zur Prüfung 008: Pflichtteil
Das Wichtigste auf einen Blick
 Das Wichtigste auf einen Blick Zusammenfassung Geometrie.Parameterform einer Geraden Eine Gerade ist wie auch in der Analysis durch zwei Punkte A, B im Raum eindeutig bestimmt einer der beiden Punkte,
Das Wichtigste auf einen Blick Zusammenfassung Geometrie.Parameterform einer Geraden Eine Gerade ist wie auch in der Analysis durch zwei Punkte A, B im Raum eindeutig bestimmt einer der beiden Punkte,
Lineare Algebra und Numerische Mathematik für D-BAUG
 P Grohs T Welti F Weber Herbstsemester 215 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 12 Aufgabe 121 Matrixpotenzen und Eigenwerte Diese Aufgabe ist
P Grohs T Welti F Weber Herbstsemester 215 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 12 Aufgabe 121 Matrixpotenzen und Eigenwerte Diese Aufgabe ist
9. Geometrische Konstruktionen und Geometrische Zahlen.
 9. Geometrische Konstruktionen und Geometrische Zahlen. Die Dreiteilungsgleichnung. Das Problem der Dreiteilung des Winkels wurde von Descartes vollständig gelöst. Dies ist in der Geometrie von Descartes
9. Geometrische Konstruktionen und Geometrische Zahlen. Die Dreiteilungsgleichnung. Das Problem der Dreiteilung des Winkels wurde von Descartes vollständig gelöst. Dies ist in der Geometrie von Descartes
Einführung in die Robotik. Jianwei Zhang
 - Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
- Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 20. April 2010 J. Zhang 63 Gliederung Allgemeine Informationen
n n x a 1 a 2 = 0 n 1 x 1 + n 2 x 2 + ( n 1 a 1 n 2 a 2 )
") IX. Normalformen ================================================================== 9.1 Die Normalenform einer Geradengleichung im 2-dimensionalen Punktraum ----------------------------------------------------------------------------------------------------------------
IX. Normalformen ================================================================== 9.1 Die Normalenform einer Geradengleichung im 2-dimensionalen Punktraum ----------------------------------------------------------------------------------------------------------------
Abstände und Zwischenwinkel
 Abstände und Zwischenwinkel Die folgenden Grundaufgaben wurden von Oliver Riesen, KS Zug, erstellt und von Stefan Gubser, KS Zug, überarbeitet. Aufgabe 1: Bestimme den Abstand der beiden Punkte P( 3 /
Abstände und Zwischenwinkel Die folgenden Grundaufgaben wurden von Oliver Riesen, KS Zug, erstellt und von Stefan Gubser, KS Zug, überarbeitet. Aufgabe 1: Bestimme den Abstand der beiden Punkte P( 3 /
Lageinvariante Konturbilderkennung. H. Burkhardt, Institut für Informatik, Universität Freiburg ME-I, Kap. 4a 1
 Kapitel 4 Lageinvariante Konturbilderkennung H. Burkhardt, Institut für Informatik, Universität Freiburg ME-I, Kap. 4a 1 Konturerfassung und Konturbeschreibung Bei allgemeinen Grau- oder Farbbildvorlagen
Kapitel 4 Lageinvariante Konturbilderkennung H. Burkhardt, Institut für Informatik, Universität Freiburg ME-I, Kap. 4a 1 Konturerfassung und Konturbeschreibung Bei allgemeinen Grau- oder Farbbildvorlagen
Geometrie. 1 Vektorielle analytische Geometrie der Ebene, Kegelschnitte
 Geometrie Geometrie W. Kuhlisch Brückenkurs 206. Vektorrechnung und analytische Geometrie der Ebene, Kegelschnitte 2. Vektorrechnung und analytische Geometrie des Raumes, Anwendungen in der Geometrie,
Geometrie Geometrie W. Kuhlisch Brückenkurs 206. Vektorrechnung und analytische Geometrie der Ebene, Kegelschnitte 2. Vektorrechnung und analytische Geometrie des Raumes, Anwendungen in der Geometrie,
Lineare Funktion. Wolfgang Kippels 3. November Inhaltsverzeichnis
 Lineare Funktion Wolfgang Kippels. November 0 Inhaltsverzeichnis Grundlegende Zusammenhänge. Aufbau der Linearen Funktion......................... Nullstellenbestimmung............................. Schnittpunktbestimmung............................
Lineare Funktion Wolfgang Kippels. November 0 Inhaltsverzeichnis Grundlegende Zusammenhänge. Aufbau der Linearen Funktion......................... Nullstellenbestimmung............................. Schnittpunktbestimmung............................
Vektorprodukt. 1-E1 Ma 1 Lubov Vassilevskaya
 Vektorprodukt 1-E1 Ma 1 Lubov Vassilevskaya Vektorprodukt Unter dem Vektorprodukt zweier Vektoren a und b versteht man den im Raum durch die folgenden Bedingungen charakterisierten Vektor: c = a b 1. c
Vektorprodukt 1-E1 Ma 1 Lubov Vassilevskaya Vektorprodukt Unter dem Vektorprodukt zweier Vektoren a und b versteht man den im Raum durch die folgenden Bedingungen charakterisierten Vektor: c = a b 1. c
Abstand Punkt/Ebene. x 50 = 0
 Abstand Punkt/Ebene 1. Gegeben ist die Ebene E: ( ) x = Um den Abstand des Punktes P(2 ) zu E zu berechnen, gehen wir von der Hesseschen Normalenform der Ebenengleichung aus und bringen die Ebene zum Schnitt
Abstand Punkt/Ebene 1. Gegeben ist die Ebene E: ( ) x = Um den Abstand des Punktes P(2 ) zu E zu berechnen, gehen wir von der Hesseschen Normalenform der Ebenengleichung aus und bringen die Ebene zum Schnitt
Geometrie. 1 Vektoren, Vektorielle analytische Geometrie der Ebene
 Geometrie Geometrie W. Kuhlisch Brückenkurs 207. Vektoren, Vektorrechnung und analytische Geometrie der Ebene 2. Vektorrechnung und analytische Geometrie des Raumes 3. Anwendungen in der Geometrie, Lagebeziehungen
Geometrie Geometrie W. Kuhlisch Brückenkurs 207. Vektoren, Vektorrechnung und analytische Geometrie der Ebene 2. Vektorrechnung und analytische Geometrie des Raumes 3. Anwendungen in der Geometrie, Lagebeziehungen
1 lineare Gleichungssysteme
 Hinweise und Lösungen: http://mathemathemathe.de/lineare-algebra-grundlagen 1 lineare Gleichungssysteme Übung 1.1: Löse das lineare Gleichungssystem: I 3x + 3y + 7z = 13 II 1x 2y + 2, 5z = 1, 5 III 4x
Hinweise und Lösungen: http://mathemathemathe.de/lineare-algebra-grundlagen 1 lineare Gleichungssysteme Übung 1.1: Löse das lineare Gleichungssystem: I 3x + 3y + 7z = 13 II 1x 2y + 2, 5z = 1, 5 III 4x
Analytische Geometrie I
 Analytische Geometrie I Rainer Hauser Januar 202 Einleitung. Geometrie und Algebra Geometrie und Algebra sind historisch zwei unabhängige Teilgebiete der Mathematik und werden bis heute von Laien weitgehend
Analytische Geometrie I Rainer Hauser Januar 202 Einleitung. Geometrie und Algebra Geometrie und Algebra sind historisch zwei unabhängige Teilgebiete der Mathematik und werden bis heute von Laien weitgehend
Lineare Funktion. Wolfgang Kippels 21. März 2011
 Lineare Funktion Wolfgang Kippels. März 0 Inhaltsverzeichnis Grundlegende Zusammenhänge. Aufbau der Linearen Funktion......................... Nullstellenbestimmung............................. Schnittpunktbestimmung............................
Lineare Funktion Wolfgang Kippels. März 0 Inhaltsverzeichnis Grundlegende Zusammenhänge. Aufbau der Linearen Funktion......................... Nullstellenbestimmung............................. Schnittpunktbestimmung............................