Nichtlineare Dynamik Einführung
|
|
|
- Bella Albrecht
- vor 6 Jahren
- Abrufe
Transkript
1 Nichtlineare Dynamik Einführung Tobias Kerscher gekürzte Internetversion (ohne fremde Bilder) Sommerakademie Ftan 2004, 13. August
2 Gliederung 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische Systeme 4. Periodenverdopplung und Chaos 2
3 Def: Nichtlineare Physik 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische Systeme 4. Periodenverdopplung und Chaos 3
4 Def: Nichtlineare Physik Lineare Physik - lineare algebraische Gleichungen - lineare Differentialgleichungen - lineare Transformationen Sind x 1, x 2 Lösungen der Gleichungen, so auch Ax 1 + Bx 2, A, B K Nichtlineare Physik = Physik - Lineare Physik 4
5 Typische Beispiele 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische Systeme 4. Periodenverdopplung und Chaos 5
6 Rotierender Reif keine Drehung: Teilchen schwingt um Ruheposition A bzw. verbleibt dort (Gleichgewichtsposition) B Drehung: A für kleine Frequenzen wie oben. Ab einer kritischen Frequenz erfolgt eine Symmetriebrechung, neue Positionen B links und rechts der ursprünglichen GGW-Position werden stabil (Bifurkation) 6
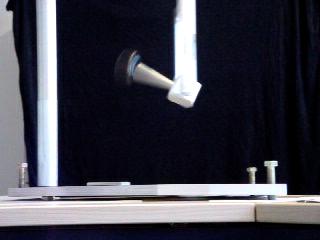
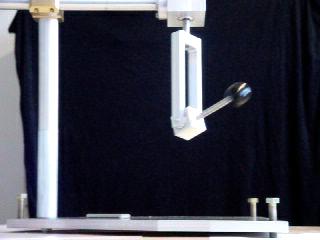
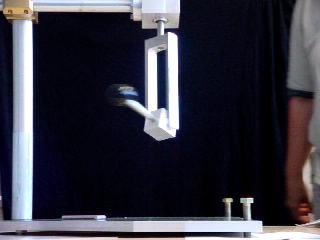

7 Sphärisches Pendel 7

8 Stabilisierung einer instabilen Lösung ohne Anregung fällt der Stab (wie erwartet) um. Bei genügend großer äußerer Anregung stabilisiert sich die instabile Ausgangslage 8
9 Dynamische Systeme 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische Systeme 4. Periodenverdopplung und Chaos 9
10 Dynamische Systeme i. Allgemeines ii. Invariante Mannigfaltigkeiten iii. Dissipative Systeme und Attraktoren 10
11 Allgemeines Dynamische Systeme sind Systeme, die sich zu jedem Zeitpunkt durch eine fixe Menge skalarer Observablen X 1,..., X n charakterisieren lassen, deren zeitliche Entwicklung durch gegeben ist (Trajektorie im X 1 (t),..., X n (t) Phasenraum). Sie heißen deterministisch, falls die Evolution immer vollständig durch den augenblicklichen Zustand und dessen Vergangenheit bestimmt ist. 11
12 Allgemeines Betrachten dazu Systeme von ODEs der Form dx i dt = F i ({X j }, λ), i = 1,..., n bzw. d X dt = F ( X, λ), X : R R n, F : R n U R p R n z.b. Lorenz-Gleichungen Ẋ = σ(x Y ) Ẏ = rx Y XZ Ż = XY bz 12

13 Allgemeines dx dt = F ( X, λ) Die Lösungen solcher Systeme lassen sich im Phasenraum darstellen. Beispiel: harmonischer Oszillator ẍ + 4π 2 x = 0 ẋ = y ẏ = 4π 2 x x(t), y(t) 13
14 Allgemeines d X dt = F ( X, λ) Punkte im Phasenraum mit F = 0 heißen singuläre Punkte. In autonomen Systemen: Fixpunkte. 14
15 Allgemeines d X dt = F ( X, λ), X : R R n, F : R n U R p R n Es gilt nun der wichtige Eindeutigkeits-Satz: X 0 U F ( X0 ) 0 F C 0 ( U) Sei, mit. Sei und genüge lokal einer Lipschitz-Bedingung F ( X) F ( X ) L X X so existiert durch jedes X 0 genau eine Lösung X : ]t 0 ɛ; t 0 + ɛ[ R n mit X(t0 ) = X 0 für obige Differentialgleichung Trajektorien im Phasenraum schneiden sich nicht. 15
16 Dynamische Systeme i. Allgemeines ii. Invariante Mannigfaltigkeiten iii. Dissipative Systeme und Attraktoren 16
17 Invariante Mannigfaltigkeiten Beschränkte (echte) Teilmengen des Phasenraumes, die während der Evolution des Systems dx dt = F ( X, λ) auf sich selbst abgebildet werden, nennt man invariante Mannigfaltigkeiten. Bezeichne d Γ die Dimension des Phasenraumes und d M die Dimension der invarianten Mannigfaltigkeit, so gilt offensichtlich: d M < d Γ 17
18 Dynamische Systeme i. Allgemeines ii. Invariante Mannigfaltigkeiten iii. Dissipative Systeme und Attraktoren 18
19 Dissipative Systeme und Attraktoren Für konservative Systeme gilt div F = 0 (Liouville) z.b. Hamiltonsche Systeme: q = H/ p ṗ = H/ q div F = q ( p H) + p ( q H) = 0 19
20 Dissipative Systeme und Attraktoren Dissipative Systeme sind (allgemein) charakterisiert durch div F 0 Von besonderem physikalischen Interesse sind Systeme mit div F < 0 bzw. allgemeiner divf t < 0 20
21 Dissipative Systeme und Attraktoren divf t < 0 Im Zeitmittel schrumpft das Phasenraumvolumen Für t streben die Trajektorien, die ursprünglich von einem Phasenraumvolumen Γ 0 ausgehen, gegen eine Teilmenge des Phasenraumes mit Volumen Null ( ). d < d Γ Diese Teilmenge heißt Attraktor. 21
22 Dissipative Systeme und Attraktoren Beispiel: gedämpfter harmonischer Oszillator ẋ = y ẏ = cx by divf = b < 0 22
23 Dissipative Systeme und Attraktoren Attraktoren sind invariante Mannigfaltigkeiten, d.h. es gibt - Fixpunktattraktoren - eindimensionale periodische Attraktoren, sog. Grenzzyklen - zwei- und höherdimensionale quasiperiodische Attraktoren (invariante Tori) - Fraktale Attraktoren (seltsame Attraktoren) 23
24 Dissipative Systeme und Attraktoren Beispiel: Grenzzyklen des Van der Pol Oszillators ẋ = y x ẏ = x + µy(1 x 2 ) µ 0 t y x t 24
 Ẏ = rx Y XZ Ż = XY bz σ = 10 b = 8/3")
25 Dissipative Systeme und Attraktoren Bekanntes Beispiel: Lorenz-Attraktor Ẋ = σ(x Y ) Ẏ = rx Y XZ Ż = XY bz σ = 10 b = 8/3 r = 28 25
26 Periodenverdopplung und Chaos 1. Def: Nichtlineare Physik 2. Typische Beispiele 3. Dynamische Systeme 4. Periodenverdopplung und Chaos 26
27 Periodenverdopplung und Chaos i. Bifurkationen ii. Poincaré-Schnitt iii. Beispiel: Getriebener Oszillator iv. Chaos 27
28 Bifurkationen Wir entwickeln die nichtlinearen Gleichungen dx dt = F ( X, λ) X s X = X s + x um einen Fixpunkt (und ) mit d x dt = L(λ) x + h( x, λ) L(λ) = ( F / X) Xs und linearisieren: d x dt = L(λ) x 28
29 Bifurkationen Die Lösungen der linearisierten Gleichung sind von der Form d x dt = L(λ) x x(t) = u i exp(ω i t) u i ist Eigenvektor von L zum Eigenwert ω i. R(ω) Stabilität des Fixpunktes hängt von R(ω i ) ab. λ c λ 29
30 Bifurkationen Betrachte nun wieder den vollständige nichtlineare Gleichung: d x dt = L(λ) x + h( x, λ) Satz: Ist x = 0 eine Lösung in einer ganzen Umgebung von, und ist ein einfacher Eigenwert, dann λ c ω c ist λ = λ c ein Bifurkationspunkt, d.h. es existiert mindestens ein neuer Lösungszweig. 30



31 Bifurkationen Beispiel: Transkritische Bifurkation ẋ = µx x 2 ẏ = y µ < 0 µ = 0 µ > 0 31


32 Bifurkationen Beispiel: Superkritische Pitchfork ẋ = µx x 3 ẏ = y µ < 0 µ = 0 µ > 0 32
33 Periodenverdopplung und Chaos i. Bifurkationen ii. Poincaré-Schnitt iii. Beispiel: Getriebener Oszillator iv. Chaos 33
34 Poincaré-Schnitt Sei dx dt = F ( X, λ) ein n dimensionales System und eine S R n 1 Schnittfläche, die nicht parallel zum Phasenfluss steht. Der Poincaré-Schnitt P : S S entsteht durch Verfolgen der Trajektorien von einem Schnitt mit S zum nächsten (gleichartigen). 34
35 Periodenverdopplung und Chaos i. Bifurkationen ii. Poincaré-Schnitt iii. Beispiel: Getriebener Oszillator iv. Chaos 35
36 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) Wir wählen γ = 0.5 Ω = 2/3 und variieren die Anregungsamplitude a. 36
 a = 0.")
37 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 0.9 Grenzzyklus 37
 a = 1.08 Periodenverdopplung 38")
38 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 1.08 Periodenverdopplung 38
39 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 1.15 Chaos 39
 a = 1.")
40 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 1.35 Grenzzyklus 40
 a = 1.45 Periodenverdopplung 41")
41 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 1.45 Periodenverdopplung 41
42 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 1.47 Periodenvervierfachung 42
43 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 1.50 Chaos 43
44 Getriebener Oszillator φ = ω ω = γω sin φ a cos(ωt) a = 0.9 a = 1.08 a = 1.15 a = 1.35 a = 1.45 a = 1.47 a = 1.50 Grenzzyklus P-Verdopplung Chaos Grenzzyklus P-Verdopplung P-Vervierfachung Chaos 44
45 Periodenverdopplung und Chaos i. Bifurkationen ii. Poincaré-Schnitt iii. Beispiel: Getriebener Oszillator iv. Chaos 45
46 Chaos Kennzeichen auf dem Weg zum Chaos: - Folge von Periodenverdopplungen bei Änderung des Kontrollparameters mit Häufungspunkt, der den Einsatz von Chaos kennzeichnet. Im chaotischen Bereich findet man oft sog. Fenster, in denen kein chaotisches Verhalten vorliegt. - Stretching and Folding - Starke Abhängigkeit der Bewegung von den Anfangsbedingungen. 46
47 Chaos Die Bewegung auf dem Attraktor ist stark von den Anfangswerten abhängig. Sei x(t) ein Punkt auf dem Attraktor. Betrachte einen nahegelegenen Punkt x(t) + δ(t). Wie entwickelt sich nun die Störung δ(t)? δ(t) δ 0 exp(λt) λ heißt Lyapunov-Exponent 47
48 Chaos Für Systeme mit positivem Lyapunov-Exponenten existiert ein Zeit-Horizont, über den hinaus die Vorhersagen zusammenbrechen. Eine Vorhersage sei akzeptabel, falls sie um weniger als a vom wirklichen Zustand abweicht: δ(t) a t horizon O Logarithmische Abhängigkeit von δ0! ( 1 λ ln a δ 0 ) 48


49 Chaos Beispiel: Vorhersage eines chaotische Systems mit Genauigkeit von a = 10 3 δ 0 = 10 7 δ 0 = t horizon = 4 ln 10 λ t horizon = 10 ln 10 λ 2.5x länger Wetter ist und bleibt unberechenbar... 49



50 Literatur G. Nicolis: Introduction to Nonlinear Science. Cambridge J. M. T. Thompson, H. B. Stewart: Nonlinear Dynamics and Chaos. Wiley S. H. Strogatz: Nonlinear Dynamics and Chaos. Westview 50
Flüsse, Fixpunkte, Stabilität
 1 Flüsse, Fixpunkte, Stabilität Proseminar: Theoretische Physik Yannic Borchard 7. Mai 2014 2 Motivation Die hier entwickelten Formalismen erlauben es, Aussagen über das Verhalten von Lösungen gewöhnlicher
1 Flüsse, Fixpunkte, Stabilität Proseminar: Theoretische Physik Yannic Borchard 7. Mai 2014 2 Motivation Die hier entwickelten Formalismen erlauben es, Aussagen über das Verhalten von Lösungen gewöhnlicher
Seltsame Attraktoren
 1 Seltsame Attraktoren Proseminar: Theoretische Physik Jonas Haferkamp 9. Juli 2014 Abbildung: Poincaré-Schnitt der Duffing-Gleichungen 2 3 Gliederung 1 Motivation 2 Was ist ein (seltsamer) Attraktor?
1 Seltsame Attraktoren Proseminar: Theoretische Physik Jonas Haferkamp 9. Juli 2014 Abbildung: Poincaré-Schnitt der Duffing-Gleichungen 2 3 Gliederung 1 Motivation 2 Was ist ein (seltsamer) Attraktor?
11. Nichtlineare Dynamik und Chaos. Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt.
 11. Nichtlineare Dynamik und Chaos Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt. der Auslenkung Fadenlänge L, Masse m, Auslenkwinkel φ Rücktreibende Kraft: Beschleunigung:
11. Nichtlineare Dynamik und Chaos Bei den meisten bisherigen Phänomenen z. B: Pendelbewegung: Kraft linear als Fkt. der Auslenkung Fadenlänge L, Masse m, Auslenkwinkel φ Rücktreibende Kraft: Beschleunigung:
Abbildung 5.1: stabile und instabile Ruhelagen
 Kapitel 5 Stabilität Eine intuitive Vorstellung vom Konzept der Stabilität vermitteln die in Abb. 5.1 dargestellten Situationen. Eine Kugel rollt unter dem Einfluss von Gravitation und Reibung auf einer
Kapitel 5 Stabilität Eine intuitive Vorstellung vom Konzept der Stabilität vermitteln die in Abb. 5.1 dargestellten Situationen. Eine Kugel rollt unter dem Einfluss von Gravitation und Reibung auf einer
Fibonacci Zahlen: 3. Hamiltonsche Systeme. 3.1 Hamilton Dynamik. Teilverhältnis beim `goldenen Schnitt : definiert als. mit
 Fibonacci Zahlen: definiert als Bemerkungen: (1) ist das Teilverhältnis beim `goldenen Schnitt : mit A T B und (2) Alle Zahlen, deren Darstellung als Kettenbruch auf endet, heißen `noble Zahlen. (3) Entwicklung
Fibonacci Zahlen: definiert als Bemerkungen: (1) ist das Teilverhältnis beim `goldenen Schnitt : mit A T B und (2) Alle Zahlen, deren Darstellung als Kettenbruch auf endet, heißen `noble Zahlen. (3) Entwicklung
Chaos - Nichtlineare Dynamik
 Äg Chaos - Nichtlineare Dynamik Renate Thies Universität Dortmund - Fachbereich Informatik Lehrstuhl für Systemanalyse (LS11) Sommersemester 2004 Chaos - Nichtlineare Dynamik 1/102 Inhaltsverzeichnis Äg
Äg Chaos - Nichtlineare Dynamik Renate Thies Universität Dortmund - Fachbereich Informatik Lehrstuhl für Systemanalyse (LS11) Sommersemester 2004 Chaos - Nichtlineare Dynamik 1/102 Inhaltsverzeichnis Äg
Blatt 1. Kinematik- Lösungsvorschlag
 Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik (T1) im SoSe 011 Blatt 1. Kinematik- Lösungsvorschlag Aufgabe 1.1. Schraubenlinie Die
Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik (T1) im SoSe 011 Blatt 1. Kinematik- Lösungsvorschlag Aufgabe 1.1. Schraubenlinie Die
Dynamische Systeme eine Einführung
 Dynamische Systeme eine Einführung Seminar für Lehramtstudierende: Mathematische Modelle Wintersemester 2010/11 Dynamische Systeme eine Einführung 1. Existenz und Eindeutigkeit von Lösungen 2. Flüsse,
Dynamische Systeme eine Einführung Seminar für Lehramtstudierende: Mathematische Modelle Wintersemester 2010/11 Dynamische Systeme eine Einführung 1. Existenz und Eindeutigkeit von Lösungen 2. Flüsse,
FC3 - Duffing Oszillator
 FC3 - Duffing Oszillator 4. Oktober 2007 Universität Paderborn - Theoretische Physik leer Autor: Stephan Blankenburg, Björn Lange Datum: 4. Oktober 2007 FC3 - Duffing Oszillator 3 1 Theorie komplexer Systeme
FC3 - Duffing Oszillator 4. Oktober 2007 Universität Paderborn - Theoretische Physik leer Autor: Stephan Blankenburg, Björn Lange Datum: 4. Oktober 2007 FC3 - Duffing Oszillator 3 1 Theorie komplexer Systeme
5. Vorlesung Wintersemester
 5. Vorlesung Wintersemester 1 Bewegung mit Stokes scher Reibung Ein dritter Weg, die Bewegungsgleichung bei Stokes scher Reibung zu lösen, ist die 1.1 Separation der Variablen m v = αv (1) Diese Methode
5. Vorlesung Wintersemester 1 Bewegung mit Stokes scher Reibung Ein dritter Weg, die Bewegungsgleichung bei Stokes scher Reibung zu lösen, ist die 1.1 Separation der Variablen m v = αv (1) Diese Methode
Die Chaostheorie a) Geschichtliche Betrachtung Die Chaostheorie Quellenverzeichnis
 Geschichtliche Betrachtung Die Chaostheorie Quellenverzeichnis") Die Chaostheorie a) Geschichtliche Betrachtung i. Das mechanistische Naturbild ii. Zweikörperproblem iii. Dreikörperproblem iv. Lagrange-Punkte v. Entdeckung des Chaos b) Die Chaostheorie i. Eigenschaften
Die Chaostheorie a) Geschichtliche Betrachtung i. Das mechanistische Naturbild ii. Zweikörperproblem iii. Dreikörperproblem iv. Lagrange-Punkte v. Entdeckung des Chaos b) Die Chaostheorie i. Eigenschaften
Motivation. Motivation 2
 Grenzzyklen 1 Motivation Grenzzyklen modellieren von selbst oszillierende Systeme Stabile Grenzzyklen kleine Abweichungen in den Anfangsbedingungen gehen in Grenzzyklus über Beispiele: Van-der-Pol Schwingkreis
Grenzzyklen 1 Motivation Grenzzyklen modellieren von selbst oszillierende Systeme Stabile Grenzzyklen kleine Abweichungen in den Anfangsbedingungen gehen in Grenzzyklus über Beispiele: Van-der-Pol Schwingkreis
durch Ratengleichungen der Form t t = F 2 N 1 t, N 2 t d N 1 t
 5. Wechselwirkungen zwischen verschiedenen Spezies Allgemein kann man die zeitliche Entwicklung zweier Spezies N 1 und N 2 durch Ratengleichungen der Form d N 1 t d N 2 t = F 1 N 1 t, N 2 t, t = F 2 N
5. Wechselwirkungen zwischen verschiedenen Spezies Allgemein kann man die zeitliche Entwicklung zweier Spezies N 1 und N 2 durch Ratengleichungen der Form d N 1 t d N 2 t = F 1 N 1 t, N 2 t, t = F 2 N
Nichtlineare Prozesse in der Elektrochemie II
 Nichtlineare Prozesse in der Elektrochemie II 5. Stabilität und Instabilität Neue (dissipative) Strukturen entstehen, wenn der bisherige stationäre Zustand, der den thermodynamischen Zweig repräsentiert,
Nichtlineare Prozesse in der Elektrochemie II 5. Stabilität und Instabilität Neue (dissipative) Strukturen entstehen, wenn der bisherige stationäre Zustand, der den thermodynamischen Zweig repräsentiert,
Theoretische Physik I: Lösungen Blatt Michael Czopnik
 Theoretische Physik I: Lösungen Blatt 2 15.10.2012 Michael Czopnik Aufgabe 1: Scheinkräfte Nutze Zylinderkoordinaten: x = r cos ϕ y = r sin ϕ z = z Zweimaliges differenzieren ergibt: ẍ = r cos ϕ 2ṙ ϕ sin
Theoretische Physik I: Lösungen Blatt 2 15.10.2012 Michael Czopnik Aufgabe 1: Scheinkräfte Nutze Zylinderkoordinaten: x = r cos ϕ y = r sin ϕ z = z Zweimaliges differenzieren ergibt: ẍ = r cos ϕ 2ṙ ϕ sin
Probestudium der Physik 2011/12
 Probestudium der Physik 2011/12 1 Schwingungen und Wellen: Einführung in die mathematischen Grundlagen 1.1 Die Sinus- und die Kosinusfunktion Die Sinusfunktion lässt sich genauso wie die Kosinusfunktion
Probestudium der Physik 2011/12 1 Schwingungen und Wellen: Einführung in die mathematischen Grundlagen 1.1 Die Sinus- und die Kosinusfunktion Die Sinusfunktion lässt sich genauso wie die Kosinusfunktion
Kurze Einführung zu Stabilität bei Differentialgleichungen und Einschrittverfahren
 Kurze Einführung zu Stabilität bei Differentialgleichungen und Einschrittverfahren Was sind typische qualitative Aussagen bei gewöhnlichen Differentialgleichungen der Form x (t) = f(t, x)? (1) 1. Andere
Kurze Einführung zu Stabilität bei Differentialgleichungen und Einschrittverfahren Was sind typische qualitative Aussagen bei gewöhnlichen Differentialgleichungen der Form x (t) = f(t, x)? (1) 1. Andere
Prüfung zur Vorlesung Mathematik I/II
 Dr. A. Caspar ETH Zürich, August 2011 D BIOL, D CHAB Prüfung zur Vorlesung Mathematik I/II Bitte ausfüllen! Name: Vorname: Legi-Nr.: Nicht ausfüllen! Aufgabe Punkte Kontrolle 1 2 3 4 5 6 Total Vollständigkeit
Dr. A. Caspar ETH Zürich, August 2011 D BIOL, D CHAB Prüfung zur Vorlesung Mathematik I/II Bitte ausfüllen! Name: Vorname: Legi-Nr.: Nicht ausfüllen! Aufgabe Punkte Kontrolle 1 2 3 4 5 6 Total Vollständigkeit
Fixpunkte und Stabilitätsanalyse
 Fixpunkte und Stabilitätsanalyse 1 Themenüberblick Motivation 1D-Probleme Bifurkationen 2D-Probleme Fixpunkttypen Lotka-Volterra-Modelle 2 Motivation Bisher: Lineare Dynamik Jetzt: Nichtlineare Systeme
Fixpunkte und Stabilitätsanalyse 1 Themenüberblick Motivation 1D-Probleme Bifurkationen 2D-Probleme Fixpunkttypen Lotka-Volterra-Modelle 2 Motivation Bisher: Lineare Dynamik Jetzt: Nichtlineare Systeme
Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder
 DGL Schwingung Physikalische Felder Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder Johannes Wiedersich 23. April 2008 http://www.e13.physik.tu-muenchen.de/wiedersich/
DGL Schwingung Physikalische Felder Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder Johannes Wiedersich 23. April 2008 http://www.e13.physik.tu-muenchen.de/wiedersich/
Hamilton-Mechanik. Inhaltsverzeichnis. 1 Einleitung. 2 Verallgemeinerter oder kanonischer Impuls. Simon Filser
 Hamilton-Mechanik Simon Filser 4.9.09 Inhaltsverzeichnis 1 Einleitung 1 Verallgemeinerter oder kanonischer Impuls 1 3 Hamiltonfunktion und kanonische Gleichungen 4 Die Hamiltonfunktion als Energie und
Hamilton-Mechanik Simon Filser 4.9.09 Inhaltsverzeichnis 1 Einleitung 1 Verallgemeinerter oder kanonischer Impuls 1 3 Hamiltonfunktion und kanonische Gleichungen 4 Die Hamiltonfunktion als Energie und
Kapitel 2. Kinematik des Massenpunktes. 2.1 Einleitung. 2.2 Massenpunkt. 2.3 Ortsvektor
 Kapitel 2 Kinematik des Massenpunktes 2.1 Einleitung In diesem Kapitel behandeln wir die Bewegung von einem oder mehreren Körpern im Raum. Wir unterscheiden dabei zwischen Kinematik und Dynamik. Die Kinematik
Kapitel 2 Kinematik des Massenpunktes 2.1 Einleitung In diesem Kapitel behandeln wir die Bewegung von einem oder mehreren Körpern im Raum. Wir unterscheiden dabei zwischen Kinematik und Dynamik. Die Kinematik
Experimente, Ideen und Entwicklung der Chaostheorie
 Experimente, Ideen und Entwicklung der Chaostheorie Stephan Lück Ursprünge der Chaostheorie Edward Lorenz (1917-2008) Meteorologe einfaches Atmosphärenmodell (ca. 1960) basierend auf Konvektion Modellexperiment
Experimente, Ideen und Entwicklung der Chaostheorie Stephan Lück Ursprünge der Chaostheorie Edward Lorenz (1917-2008) Meteorologe einfaches Atmosphärenmodell (ca. 1960) basierend auf Konvektion Modellexperiment
Chaotisches Verhalten in nichtlinearen mechanischen Modellsystemen
 Bachelorarbeit im Studienfach Physik Chaotisches Verhalten in nichtlinearen mechanischen Modellsystemen Maximilian Schilcher Matrikelnummer 133957 Theoretische Physik II Universität Augsburg 17. September
Bachelorarbeit im Studienfach Physik Chaotisches Verhalten in nichtlinearen mechanischen Modellsystemen Maximilian Schilcher Matrikelnummer 133957 Theoretische Physik II Universität Augsburg 17. September
Beispiel: Evolution infizierter Individuen
 Differentialgleichungen sind sehr nützlich in der Modellierung biologischer Prozesse, denn: damit kann man auch sehr komplizierte Systeme beschreiben die Mathematik liefert mit der gut entwickelten Theorie
Differentialgleichungen sind sehr nützlich in der Modellierung biologischer Prozesse, denn: damit kann man auch sehr komplizierte Systeme beschreiben die Mathematik liefert mit der gut entwickelten Theorie
4.7 Lineare Systeme 1. Ordnung
 3. Die allgemeine Lösung der inhomogenen Differentialgleichung lautet damit yx = y hom x + y inh x = c x + c 2 x + 8 x + 4 xlnx2 4 xlnx = C x + C 2 x + 4 xlnx2 4 xlnx. Wir haben c 2 + 8 zu C 2 zusammengefasst.
3. Die allgemeine Lösung der inhomogenen Differentialgleichung lautet damit yx = y hom x + y inh x = c x + c 2 x + 8 x + 4 xlnx2 4 xlnx = C x + C 2 x + 4 xlnx2 4 xlnx. Wir haben c 2 + 8 zu C 2 zusammengefasst.
x W x 3 W M 2 x 2 x 1
 Priv-Doz G Reißig, F Goßmann MSc Universität der Bundeswehr München Institut für Steuer- und Regelungstechnik LRT-5 Email: felixgossmann@unibwde Moderne Methoden der Regelungstechnik, HT 26 Übung - Lösung
Priv-Doz G Reißig, F Goßmann MSc Universität der Bundeswehr München Institut für Steuer- und Regelungstechnik LRT-5 Email: felixgossmann@unibwde Moderne Methoden der Regelungstechnik, HT 26 Übung - Lösung
Seminar stabile Zufallsprozesse
 Definitionen und Eigenschaften stabiler Verteilungen 2. November 2011 Inhalt 1 Definitionen Definitionen Beweis der Äquivalenz Beispiele 2 Eigenschaften 3 Charakteristische Funktion 4 Laplace Transformation
Definitionen und Eigenschaften stabiler Verteilungen 2. November 2011 Inhalt 1 Definitionen Definitionen Beweis der Äquivalenz Beispiele 2 Eigenschaften 3 Charakteristische Funktion 4 Laplace Transformation
Kapitel 8: Gewöhnliche Differentialgleichungen 8.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2.
 Kapitel 8: Gewöhnliche Differentialgleichungen 8.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: (enthalten Ableitungen der gesuchten Funktionen) Geschwindigkeit:
Kapitel 8: Gewöhnliche Differentialgleichungen 8.1 Definition, Existenz, Eindeutigkeit von Lösungen Motivation: z.b. Newton 2. Gesetz: (enthalten Ableitungen der gesuchten Funktionen) Geschwindigkeit:
Blatt 10. Hamilton-Formalismus- Lösungsvorschlag
 Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik T) im SoSe 20 Blatt 0. Hamilton-Formalismus- Lösungsvorschlag Aufgabe 0.. Hamilton-Formalismus
Fakultät für Physik der LMU München Lehrstuhl für Kosmologie, Prof. Dr. V. Mukhanov Übungen zu Klassischer Mechanik T) im SoSe 20 Blatt 0. Hamilton-Formalismus- Lösungsvorschlag Aufgabe 0.. Hamilton-Formalismus
Name: Gruppe: Matrikel-Nummer:
 Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 12/13/14) Dozent: J. von Delft Übungen: B. Kubala Nachklausur zur Vorlesung T1: Theoretische Mechanik, SoSe 2008 (1. Oktober
Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 12/13/14) Dozent: J. von Delft Übungen: B. Kubala Nachklausur zur Vorlesung T1: Theoretische Mechanik, SoSe 2008 (1. Oktober
Formelsammlung: Physik I für Naturwissenschaftler
 Formelsammlung: Physik I für Naturwissenschaftler 1 Was ist Physik? Stand: 13. Dezember 212 Physikalische Größe X = Zahl [X] Einheit SI-Basiseinheiten Mechanik Zeit [t] = 1 s Länge [x] = 1 m Masse [m]
Formelsammlung: Physik I für Naturwissenschaftler 1 Was ist Physik? Stand: 13. Dezember 212 Physikalische Größe X = Zahl [X] Einheit SI-Basiseinheiten Mechanik Zeit [t] = 1 s Länge [x] = 1 m Masse [m]
Lösungen zu den Hausaufgaben zur Analysis II
 Christian Fenske Lösungen zu den Hausaufgaben zur Analysis II Blatt 6 1. Seien 0 < b < a und (a) M = {(x, y, z) R 3 x 2 + y 4 + z 4 = 1}. (b) M = {(x, y, z) R 3 x 3 + y 3 + z 3 = 3}. (c) M = {((a+b sin
Christian Fenske Lösungen zu den Hausaufgaben zur Analysis II Blatt 6 1. Seien 0 < b < a und (a) M = {(x, y, z) R 3 x 2 + y 4 + z 4 = 1}. (b) M = {(x, y, z) R 3 x 3 + y 3 + z 3 = 3}. (c) M = {((a+b sin
Einführung in die Physik
 Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Übung : Vorlesung: Tutorials: Montags 13:15 bis 14 Uhr, Liebig-HS Montags 14:15 bis 15:45, Liebig HS Montags
Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Übung : Vorlesung: Tutorials: Montags 13:15 bis 14 Uhr, Liebig-HS Montags 14:15 bis 15:45, Liebig HS Montags
4.2 Der Harmonische Oszillator
 Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Praktikum I PP Physikalisches Pendel
 Praktikum I PP Physikalisches Pendel Hanno Rein Betreuer: Heiko Eitel 16. November 2003 1 Ziel der Versuchsreihe In der Physik lassen sich viele Vorgänge mit Hilfe von Schwingungen beschreiben. Die klassische
Praktikum I PP Physikalisches Pendel Hanno Rein Betreuer: Heiko Eitel 16. November 2003 1 Ziel der Versuchsreihe In der Physik lassen sich viele Vorgänge mit Hilfe von Schwingungen beschreiben. Die klassische
+ + Personalmanagement Stuff-Turnover. Simulation im Excel. Organizational Headcount. Turnover. Recruitment
 Personalmanagement Stuff-Turnover + Organizational Headcount Recruitment + + Turnover Simulation im Excel Schmetterlingseffekt 1 0,8 x 0,6 0,4 0,2 0 0 5 10 15 2 0 2 5 3 0 n Feigenbaum-Szenario Bifurkationspunkt:
Personalmanagement Stuff-Turnover + Organizational Headcount Recruitment + + Turnover Simulation im Excel Schmetterlingseffekt 1 0,8 x 0,6 0,4 0,2 0 0 5 10 15 2 0 2 5 3 0 n Feigenbaum-Szenario Bifurkationspunkt:
Vorwissen Lineare Modelle zweier Bevölkerungen
 Reiser Stephan 1 Ablauf Vorwissen Lineare Modelle zweier Bevölkerungen Das Konkurrenzmodell von Volterra Ein allgemeineres Konkurrenzmodell Periodische Bahnen für die allgemeine Volterra-Lotka- Gleichung
Reiser Stephan 1 Ablauf Vorwissen Lineare Modelle zweier Bevölkerungen Das Konkurrenzmodell von Volterra Ein allgemeineres Konkurrenzmodell Periodische Bahnen für die allgemeine Volterra-Lotka- Gleichung
31 Die Potentialgleichung
 3 Die Potentialgleichung Die Potentialgleichung oder auch Poisson-Gleichung ist die lineare Gleichung zweiter Ordnung u = f in einem Gebiet R n. Im homogenen Fall f = 0 spricht man auch von der Laplace-
3 Die Potentialgleichung Die Potentialgleichung oder auch Poisson-Gleichung ist die lineare Gleichung zweiter Ordnung u = f in einem Gebiet R n. Im homogenen Fall f = 0 spricht man auch von der Laplace-
Gleichgewichte von Differentialgleichungen
 Gleichgewichte von Differentialgleichungen Gleichgewichte von Differentialgleichungen Teil 1 Zur Erinnerung: Zur Erinnerung: Wir hatten lineare Differentialgleichungen betrachtet: in R 1 : Zur Erinnerung:
Gleichgewichte von Differentialgleichungen Gleichgewichte von Differentialgleichungen Teil 1 Zur Erinnerung: Zur Erinnerung: Wir hatten lineare Differentialgleichungen betrachtet: in R 1 : Zur Erinnerung:
3. Berechnen Sie auch die Beschleunigung a als Funktion der Zeit t. 4. Erstellen Sie ein SIMULINK Modell, das x(t) numerisch berechnet.
 numerisch berechnet.") unit 1 / Seite 1 Einführung Differenzialgleichungen In physikalischen Anwendungen spielt oft eine Messgrösse in Abhängigkeit von der Zeit die Hauptrolle. Beispiele dafür sind Druck p, Temperatur T, Geschwindigkeit
unit 1 / Seite 1 Einführung Differenzialgleichungen In physikalischen Anwendungen spielt oft eine Messgrösse in Abhängigkeit von der Zeit die Hauptrolle. Beispiele dafür sind Druck p, Temperatur T, Geschwindigkeit
Bimatrix-Spiele. Sarah Hidlmayer
 Bimatrix-Spiele Sarah Hidlmayer 13.12.2011 Literatur: Josef Hofbauer and Karl Sigmund: Evolutionary Games and Population Dynamics (Ch. 11), Cambridge. Bimatrix-Spiele 1 Dynamik für Bimatrix-Spiele 2 Partnerschaftsspiele
Bimatrix-Spiele Sarah Hidlmayer 13.12.2011 Literatur: Josef Hofbauer and Karl Sigmund: Evolutionary Games and Population Dynamics (Ch. 11), Cambridge. Bimatrix-Spiele 1 Dynamik für Bimatrix-Spiele 2 Partnerschaftsspiele
Lösung 05 Klassische Theoretische Physik I WS 15/16. y a 2 + r 2. A(r) =
 =") Karlsruher Institut für Technologie Institut für theoretische Festkörperphsik www.tfp.kit.edu Lösung Klassische Theoretische Phsik I WS / Prof. Dr. G. Schön Punkte Sebastian Zanker, Daniel Mendler Besprechung...
Karlsruher Institut für Technologie Institut für theoretische Festkörperphsik www.tfp.kit.edu Lösung Klassische Theoretische Phsik I WS / Prof. Dr. G. Schön Punkte Sebastian Zanker, Daniel Mendler Besprechung...
Klausur: Höhere Mathematik IV
 Prof. Dr. Josef Bemelmans Templergraben 55 52062 Aachen Raum 00 (Hauptgebäude) Klausur: Höhere Mathematik IV Tel.: +49 24 80 94889 Sekr.: +49 24 80 9492 Fax: +49 24 80 92323 bemelmans@instmath.rwth-aachen.de
Prof. Dr. Josef Bemelmans Templergraben 55 52062 Aachen Raum 00 (Hauptgebäude) Klausur: Höhere Mathematik IV Tel.: +49 24 80 94889 Sekr.: +49 24 80 9492 Fax: +49 24 80 92323 bemelmans@instmath.rwth-aachen.de
Iterative Verfahren, Splittingmethoden
 Iterative Verfahren, Splittingmethoden Theodor Müller 19. April 2005 Sei ein lineares Gleichungssystem der Form Ax = b b C n, A C n n ( ) gegeben. Es sind direkte Verfahren bekannt, die ein solches Gleichungssystem
Iterative Verfahren, Splittingmethoden Theodor Müller 19. April 2005 Sei ein lineares Gleichungssystem der Form Ax = b b C n, A C n n ( ) gegeben. Es sind direkte Verfahren bekannt, die ein solches Gleichungssystem
Institut für Elektrotechnik u. Informationstechnik. Systemtheorie - Nichtlineare Systeme
 Institut für Elektrotechnik u. Informationstechnik Systemtheorie - Nichtlineare Systeme Stabilitätskonzepte nach Ljapunov Prof. Dr. techn. F. Gausch 211 Inhaltsverzeichnis 1 Gegenüberstellung von Eigenschaften
Institut für Elektrotechnik u. Informationstechnik Systemtheorie - Nichtlineare Systeme Stabilitätskonzepte nach Ljapunov Prof. Dr. techn. F. Gausch 211 Inhaltsverzeichnis 1 Gegenüberstellung von Eigenschaften
Schwingungen. Harmonische Schwingungen. t Anharmonische Schwingungen. S. Alexandrova FDIBA TU Sofia 1
 Schwingungen Harmonische Schwingungen x t Anharmonische Schwingungen x x t S. Alexandrova FDIBA TU Sofia 1 t ANHARMONISCHE SCHWINGUNGEN EHB : Kraft F = -k(x-x o ) Potentielle Energie: E p E p Parabel mit
Schwingungen Harmonische Schwingungen x t Anharmonische Schwingungen x x t S. Alexandrova FDIBA TU Sofia 1 t ANHARMONISCHE SCHWINGUNGEN EHB : Kraft F = -k(x-x o ) Potentielle Energie: E p E p Parabel mit
Analyse nichtlinearer dynamischer Systeme der Elektrotechnik
 E. S. Philippow / W. G. Büntig Analyse nichtlinearer dynamischer Systeme der Elektrotechnik Einführung in die numerische Untersuchung einfacher Systeme Mit 198 Bildern und 27 Tabellen Carl Hanser Verlag
E. S. Philippow / W. G. Büntig Analyse nichtlinearer dynamischer Systeme der Elektrotechnik Einführung in die numerische Untersuchung einfacher Systeme Mit 198 Bildern und 27 Tabellen Carl Hanser Verlag
7 Die Hamilton-Jacobi-Theorie
 7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
7 Die Hamilton-Jacobi-Theorie Ausgearbeitet von Rolf Horn und Bernhard Schmitz 7.1 Einleitung Um die Hamilton schen Bewegungsgleichungen q k = H(q, p) p k ṗ k = H(p, q) q k zu vereinfachen, führten wir
Musterlösung. Aufgabe 1 a) Die Aussage ist falsch. Ein Gegenbeispiel ist die Funktion f : [0, 1] R, die folgendermaßen definiert ist:
![Musterlösung. Aufgabe 1 a) Die Aussage ist falsch. Ein Gegenbeispiel ist die Funktion f : [0, 1] R, die folgendermaßen definiert ist:](/thumbs/63/49291408.jpg "Musterlösung. Aufgabe 1 a) Die Aussage ist falsch. Ein Gegenbeispiel ist die Funktion f : [0, 1] R, die folgendermaßen definiert ist:") Musterlösung Aufgabe a) Die Aussage ist falsch. Ein Gegenbeispiel ist die Funktion f : [, ] R, die folgendermaßen definiert ist: f(x) := { für x R \ Q für x Q f ist offensichtlich beschränkt. Wir zeigen,
Musterlösung Aufgabe a) Die Aussage ist falsch. Ein Gegenbeispiel ist die Funktion f : [, ] R, die folgendermaßen definiert ist: f(x) := { für x R \ Q für x Q f ist offensichtlich beschränkt. Wir zeigen,
Das mathematische Pendel
 1 Das mathematische Pendel A. Krumbholz, S. Effendi 25. Juni 2013 2 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung 3 1.1 Das mathematische Pendel........................... 3 1.2
1 Das mathematische Pendel A. Krumbholz, S. Effendi 25. Juni 2013 2 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung 3 1.1 Das mathematische Pendel........................... 3 1.2
2. Klausur zur Vorlesung Theoretische Physik A Universität Karlsruhe WS 2004/05
 . Klausur zur Vorlesung Theoretische Physik A Universität Karlsruhe WS 004/05 Prof. Dr. Gerd Schön Dr. Matthias Eschrig Dauer: Stunden Gesamtpunktzahl: 30 Punkte + 5 Zusatzpunkte Hinweise: Beginnen Sie
. Klausur zur Vorlesung Theoretische Physik A Universität Karlsruhe WS 004/05 Prof. Dr. Gerd Schön Dr. Matthias Eschrig Dauer: Stunden Gesamtpunktzahl: 30 Punkte + 5 Zusatzpunkte Hinweise: Beginnen Sie
6 Gewöhnliche Differentialgleichungen
 6 Gewöhnliche Differentialgleichungen Differentialgleichungen sind Gleichungen in denen nicht nur eine Funktion selbst sondern auch ihre Ableitungen vorkommen. Im einfachsten Fall gibt es eine unabhängige
6 Gewöhnliche Differentialgleichungen Differentialgleichungen sind Gleichungen in denen nicht nur eine Funktion selbst sondern auch ihre Ableitungen vorkommen. Im einfachsten Fall gibt es eine unabhängige
11. Vorlesung Wintersemester
 11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
Ljapunov Exponenten. Reiner Lauterbach
 Ljapunov Exponenten Reiner Lauterbach 28. Februar 2003 2 Zusammenfassung n diesem Teil betrachten wir ein wichtiges Thema: sensitive Abhängigkeit. Zunächst hat man ja stetige Abhängigkeit, wie man sie
Ljapunov Exponenten Reiner Lauterbach 28. Februar 2003 2 Zusammenfassung n diesem Teil betrachten wir ein wichtiges Thema: sensitive Abhängigkeit. Zunächst hat man ja stetige Abhängigkeit, wie man sie
Übungsskript Regelungstechnik 2
 Seite 1 von 11 Universität Ulm, Institut für Mess-, Regel- und Mikrotechnik Prof. Dr.-Ing. Klaus Dietmayer / Seite 2 von 11 Aufgabe 1 : In dieser Aufgabe sollen zeitdiskrete Systeme untersucht werden.
Seite 1 von 11 Universität Ulm, Institut für Mess-, Regel- und Mikrotechnik Prof. Dr.-Ing. Klaus Dietmayer / Seite 2 von 11 Aufgabe 1 : In dieser Aufgabe sollen zeitdiskrete Systeme untersucht werden.
2.3.4 Drehungen in drei Dimensionen
 2.3.4 Drehungen in drei Dimensionen Wir verallgemeinern die bisherigen Betrachtungen nun auf den dreidimensionalen Fall. Für Drehungen des Koordinatensystems um die Koordinatenachsen ergibt sich 1 x 1
2.3.4 Drehungen in drei Dimensionen Wir verallgemeinern die bisherigen Betrachtungen nun auf den dreidimensionalen Fall. Für Drehungen des Koordinatensystems um die Koordinatenachsen ergibt sich 1 x 1
Kleine Formelsammlung zu Mathematik für Ingenieure IIA
 Kleine Formelsammlung zu Mathematik für Ingenieure IIA Florian Franzmann 5. Oktober 004 Inhaltsverzeichnis Additionstheoreme Reihen und Folgen 3. Reihen...................................... 3. Potenzreihen..................................
Kleine Formelsammlung zu Mathematik für Ingenieure IIA Florian Franzmann 5. Oktober 004 Inhaltsverzeichnis Additionstheoreme Reihen und Folgen 3. Reihen...................................... 3. Potenzreihen..................................
Musterlösungen. Theoretische Physik I: Klassische Mechanik
 Blatt 1 4.01.013 Musterlösungen Theoretische Physik I: Klassische Mechanik Prof. Dr. G. Alber MSc Nenad Balanesković Hamilton-Funktion 1. Betrachten Sie zwei Massenpunktem 1 undm die sich gemäß dem Newtonschen
Blatt 1 4.01.013 Musterlösungen Theoretische Physik I: Klassische Mechanik Prof. Dr. G. Alber MSc Nenad Balanesković Hamilton-Funktion 1. Betrachten Sie zwei Massenpunktem 1 undm die sich gemäß dem Newtonschen
Vorlesung Physik für Pharmazeuten und Biologen
 Vorlesung Physik für Pharmazeuten und Biologen Schwingungen Mechanische Wellen Akustik Freier harmonischer Oszillator Beispiel: Das mathematische Pendel Bewegungsgleichung : d s mg sinϕ = m dt Näherung
Vorlesung Physik für Pharmazeuten und Biologen Schwingungen Mechanische Wellen Akustik Freier harmonischer Oszillator Beispiel: Das mathematische Pendel Bewegungsgleichung : d s mg sinϕ = m dt Näherung
7. Systeme mit drei (und mehr) Spezies: chaotische Systeme
 Spezies: chaotische Systeme") 7. Systeme mit drei (und mehr) Spezies: chaotische Systeme Dies kann z.b. Ein System mit mehreren verschiedenen Räubern sein, die die selben Beutetiere jagen. Auch ein nicht autonomes System mit zwei Spezies
7. Systeme mit drei (und mehr) Spezies: chaotische Systeme Dies kann z.b. Ein System mit mehreren verschiedenen Räubern sein, die die selben Beutetiere jagen. Auch ein nicht autonomes System mit zwei Spezies
5. Fourier-Transformation
 Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Von der Schönheit des mathematischen Chaos. Eine Einführung in Seltsame Attraktoren mit jreality
 Von der Schönheit des mathematischen Chaos Eine Einführung in Seltsame Attraktoren mit jreality Inhalt Physikalische Grundlagen Definition Eigenschaften Beispiele Implementierung Demonstration Physikalische
Von der Schönheit des mathematischen Chaos Eine Einführung in Seltsame Attraktoren mit jreality Inhalt Physikalische Grundlagen Definition Eigenschaften Beispiele Implementierung Demonstration Physikalische
Grundlagen der Physik 2 Schwingungen und Wärmelehre
 (c) Ulm University p. 1/ Grundlagen der Physik Schwingungen und Wärmelehre 3. 04. 006 Othmar Marti othmar.marti@uni-ulm.de Experimentelle Physik Universität Ulm (c) Ulm University p. / Physikalisches Pendel
(c) Ulm University p. 1/ Grundlagen der Physik Schwingungen und Wärmelehre 3. 04. 006 Othmar Marti othmar.marti@uni-ulm.de Experimentelle Physik Universität Ulm (c) Ulm University p. / Physikalisches Pendel
Logistische Gleichung
 Logistische Gleichung Marius Bohn Fakultt6.1MathematikderUniversittSaarbrcken 22.11.2011 Marius Bohn (Universität Saarbrücken) Logistische Gleichung 22.11.2011 1 / 37 Übersicht Bei der Untersuchung von
Logistische Gleichung Marius Bohn Fakultt6.1MathematikderUniversittSaarbrcken 22.11.2011 Marius Bohn (Universität Saarbrücken) Logistische Gleichung 22.11.2011 1 / 37 Übersicht Bei der Untersuchung von
Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016 Hörsaal 2 Montag, den 08. 08. 2016 Beginn: 10.00 Uhr Bearbeitungszeit: 120
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016 Hörsaal 2 Montag, den 08. 08. 2016 Beginn: 10.00 Uhr Bearbeitungszeit: 120
10 Untermannigfaltigkeiten
 10. Untermannigfaltigkeiten 1 10 Untermannigfaltigkeiten Definition. Eine Menge M R n heißt k-dimensionale Untermannigfaltigkeit des R n, 1 k n, falls es zu jedem a M eine offene Umgebung U R n von a und
10. Untermannigfaltigkeiten 1 10 Untermannigfaltigkeiten Definition. Eine Menge M R n heißt k-dimensionale Untermannigfaltigkeit des R n, 1 k n, falls es zu jedem a M eine offene Umgebung U R n von a und
Einführung in Dynamische Systeme Vorlesung im Sommersemester 2010 Universität Hamburg. Prof. Roland Gunesch
 Einführung in Dynamische Systeme Vorlesung im Sommersemester 2010 Universität Hamburg Prof. Roland Gunesch Kontakt-Information: Prof. Roland Gunesch Büro 107, Geomatikum, Bereich Dgl. und Dynamische Systeme
Einführung in Dynamische Systeme Vorlesung im Sommersemester 2010 Universität Hamburg Prof. Roland Gunesch Kontakt-Information: Prof. Roland Gunesch Büro 107, Geomatikum, Bereich Dgl. und Dynamische Systeme
Übungen zur Theoretischen Physik 1 Lösungen zum Mathe-Test
 Prof. C. Greiner, Dr. H. van Hees Wintersemester 2012/2013 Übungen zur Theoretischen Physik 1 Lösungen zum Mathe-Test Aufgabe 1: Bruchrechnung Lösen Sie die folgenden Gleichungen nach x auf (a) x x 2 1
Prof. C. Greiner, Dr. H. van Hees Wintersemester 2012/2013 Übungen zur Theoretischen Physik 1 Lösungen zum Mathe-Test Aufgabe 1: Bruchrechnung Lösen Sie die folgenden Gleichungen nach x auf (a) x x 2 1
6. Erzwungene Schwingungen
 6. Erzwungene Schwingungen Ein durch zeitveränderliche äußere Einwirkung zum Schwingen angeregtes (gezwungenes) System führt erzwungene Schwingungen durch. Bedeutsam sind vor allem periodische Erregungen
6. Erzwungene Schwingungen Ein durch zeitveränderliche äußere Einwirkung zum Schwingen angeregtes (gezwungenes) System führt erzwungene Schwingungen durch. Bedeutsam sind vor allem periodische Erregungen
Übungen zu Partielle Differentialgleichungen, WS 2016
 Übungen zu Partielle Differentialgleichungen, WS 2016 Ulisse Stefanelli 16. Januar 2017 1 Beispiele 1. Betrachten Sie die Beispiele von nichtlinearen PDG und Systemen, die wir im Kurs diskutiert haben,
Übungen zu Partielle Differentialgleichungen, WS 2016 Ulisse Stefanelli 16. Januar 2017 1 Beispiele 1. Betrachten Sie die Beispiele von nichtlinearen PDG und Systemen, die wir im Kurs diskutiert haben,
Theoretische Physik: Mechanik
 Ferienkurs Theoretische Physik: Mechanik Blatt 4 - Lösung Technische Universität München 1 Fakultät für Physik 1 Zwei Kugeln und der Satz von Steiner Nehmen Sie zwei Kugeln mit identischem Radius R und
Ferienkurs Theoretische Physik: Mechanik Blatt 4 - Lösung Technische Universität München 1 Fakultät für Physik 1 Zwei Kugeln und der Satz von Steiner Nehmen Sie zwei Kugeln mit identischem Radius R und
Lösungen zu Mathematik I/II
 Prof. Dr. E. W. Farkas ETH Zürich, Februar 11 D BIOL, D CHAB Lösungen zu Mathematik I/II Aufgaben 1. 1 Punkte a Wir berechnen lim x x + x + 1 x + x 3 + x = 1. b Wir benutzen L Hôpital e x e x lim x sinx
Prof. Dr. E. W. Farkas ETH Zürich, Februar 11 D BIOL, D CHAB Lösungen zu Mathematik I/II Aufgaben 1. 1 Punkte a Wir berechnen lim x x + x + 1 x + x 3 + x = 1. b Wir benutzen L Hôpital e x e x lim x sinx
Experimentalphysik E1
 Experimentalphysik E1 Erzwungene & gekoppelte Schwingungen Alle Informationen zur Vorlesung unter : http://www.physik.lmu.de/lehre/vorlesungen/index.html 10. Jan. 016 Gedämpfte Schwingungen m d x dt +
Experimentalphysik E1 Erzwungene & gekoppelte Schwingungen Alle Informationen zur Vorlesung unter : http://www.physik.lmu.de/lehre/vorlesungen/index.html 10. Jan. 016 Gedämpfte Schwingungen m d x dt +
feste Körper: Idealvorstellung Kristall
 Elastizität fester Körper Massenpunkt starrer Körper Gase reale Körper feste Körper: Idealvorstellung Kristall Zug-, Druck-, Tangential- und Schubspannung Beispiele von Oberflächenkräften (im Gegensatz
Elastizität fester Körper Massenpunkt starrer Körper Gase reale Körper feste Körper: Idealvorstellung Kristall Zug-, Druck-, Tangential- und Schubspannung Beispiele von Oberflächenkräften (im Gegensatz
Übungen zu Physik 1 für Maschinenwesen
 Physikdepartent E13 WS 011/1 Übungen zu Physik 1 für Maschinenwesen Prof. Dr. Peter Müller-Buschbau, Dr. Eva M. Herzig, Dr. Volker Körstgens, David Magerl, Markus Schindler, Moritz v. Sivers Vorlesung
Physikdepartent E13 WS 011/1 Übungen zu Physik 1 für Maschinenwesen Prof. Dr. Peter Müller-Buschbau, Dr. Eva M. Herzig, Dr. Volker Körstgens, David Magerl, Markus Schindler, Moritz v. Sivers Vorlesung
Lineare Systeme mit einem Freiheitsgrad
 Höhere Technische Mechanik Lineare Systeme mit einem Freiheitsgrad Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/200 Übersicht. Grundlagen der Analytischen
Höhere Technische Mechanik Lineare Systeme mit einem Freiheitsgrad Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/200 Übersicht. Grundlagen der Analytischen
Lotka-Volterra-Gleichungen für mehr als zwei Populationen
 Lotka-Volterra-Gleichungen für mehr als zwei Populationen Dennis Kunz 06.12.2011 Josef Hofbauer and Karl Sigmund: Evolutionary Games and Population Dynamics Lotka-Volterra-Gleichungen für mehr als zwei
Lotka-Volterra-Gleichungen für mehr als zwei Populationen Dennis Kunz 06.12.2011 Josef Hofbauer and Karl Sigmund: Evolutionary Games and Population Dynamics Lotka-Volterra-Gleichungen für mehr als zwei
Exakte Differentialgleichungen
 Exakte Differentialgleichungen M. Vock Universität Heidelberg Seminar Mathematische Modellierung am 11.11.2008 Gliederung Differentialgleichungen eine erste Begegnung Definition Gewöhnliche DGL Die exakte
Exakte Differentialgleichungen M. Vock Universität Heidelberg Seminar Mathematische Modellierung am 11.11.2008 Gliederung Differentialgleichungen eine erste Begegnung Definition Gewöhnliche DGL Die exakte
5 Gewöhnliche Differentialgleichungen
 5 Gewöhnliche Differentialgleichungen 5.1 Einleitung & Begriffsbildung Slide 223 Natürliches Wachstum Eine Population bestehe zur Zeit t aus N(t) Individuen. Die Population habe konstante Geburts- und
5 Gewöhnliche Differentialgleichungen 5.1 Einleitung & Begriffsbildung Slide 223 Natürliches Wachstum Eine Population bestehe zur Zeit t aus N(t) Individuen. Die Population habe konstante Geburts- und
Laplace-Transformation
 Laplace-Transformation Gegeben: Funktion mit beschränktem Wachstum: x(t) Ke ct t [, ) Definition: Laplace-Transformation: X(s) = e st x(t) dt = L{x(t)} s C Re(s) >c Definition: Inverse Laplace-Transformation:
Laplace-Transformation Gegeben: Funktion mit beschränktem Wachstum: x(t) Ke ct t [, ) Definition: Laplace-Transformation: X(s) = e st x(t) dt = L{x(t)} s C Re(s) >c Definition: Inverse Laplace-Transformation:
Kapitel 5 (Ebene autonome Systeme) Abschnitt 5.1 (Reduktion auf skalare Di.gleichungen)
 Abschnitt 5.1 (Reduktion auf skalare Di.gleichungen)") Abschnitt 5.1 Reduktion auf skalare Differenzialgleichungen 33 Kapitel 5 Ebene autonome Systeme Abschnitt 5.1 Reduktion auf skalare Di.gleichungen Aufgabe 1, Seite 190 Das gegebene System besitzt oensichtlich
Abschnitt 5.1 Reduktion auf skalare Differenzialgleichungen 33 Kapitel 5 Ebene autonome Systeme Abschnitt 5.1 Reduktion auf skalare Di.gleichungen Aufgabe 1, Seite 190 Das gegebene System besitzt oensichtlich
Klausur Mathematik I
 Technische Universität Dresden 15. August 2008 Institut für Numerische Mathematik Dr. K. Eppler Klausur Mathematik I für Studierende der Fakultät Maschinenwesen (mit Lösungshinweisen) Name: Matrikelnummer.:
Technische Universität Dresden 15. August 2008 Institut für Numerische Mathematik Dr. K. Eppler Klausur Mathematik I für Studierende der Fakultät Maschinenwesen (mit Lösungshinweisen) Name: Matrikelnummer.:
Lineare Differenzen- und Differenzialgleichungen
 Lineare Differenzen- und Differenzialgleichungen Fakultät Grundlagen April 2011 Fakultät Grundlagen Lineare Differenzen- und Differenzialgleichungen Übersicht 1 Beispiele Anwendung auf Fragen der dynamischen
Lineare Differenzen- und Differenzialgleichungen Fakultät Grundlagen April 2011 Fakultät Grundlagen Lineare Differenzen- und Differenzialgleichungen Übersicht 1 Beispiele Anwendung auf Fragen der dynamischen
Outline. 1 Vektoren im Raum. 2 Komponenten und Koordinaten. 3 Skalarprodukt. 4 Vektorprodukt. 5 Analytische Geometrie. 6 Lineare Räume, Gruppentheorie
 Outline 1 Vektoren im Raum 2 Komponenten und Koordinaten 3 Skalarprodukt 4 Vektorprodukt 5 Analytische Geometrie 6 Lineare Räume, Gruppentheorie Roman Wienands (Universität zu Köln) Mathematik II für Studierende
Outline 1 Vektoren im Raum 2 Komponenten und Koordinaten 3 Skalarprodukt 4 Vektorprodukt 5 Analytische Geometrie 6 Lineare Räume, Gruppentheorie Roman Wienands (Universität zu Köln) Mathematik II für Studierende
Symplektische Geometrie
 Symplektische Geometrie Def. Eine symplektische Form auf U R 2n ist eine geschlossene, nichtausgeartete 2-Differentialform. }{{}}{{} d.h. dω = 0 wird gleich definiert Wir bezeichnen sie normalerweise mit
Symplektische Geometrie Def. Eine symplektische Form auf U R 2n ist eine geschlossene, nichtausgeartete 2-Differentialform. }{{}}{{} d.h. dω = 0 wird gleich definiert Wir bezeichnen sie normalerweise mit
Übungen zu Meteorologische Modellierung Teil 'Grundlagen der Numerik'
 Übungen zu Meteorologische Modellierung Teil 'Grundlagen der Numerik' 1. Diskretisierung in der Zeit: Die Evolutionsgleichung Kurzzusammenfassung Zur Erprobung der Verfahren zur zeitlichen Diskretisierung
Übungen zu Meteorologische Modellierung Teil 'Grundlagen der Numerik' 1. Diskretisierung in der Zeit: Die Evolutionsgleichung Kurzzusammenfassung Zur Erprobung der Verfahren zur zeitlichen Diskretisierung
Analysis IV. Gruppenübungen
 Fachbereich Mathematik Prof. B. Farkas Martin Fuchssteiner Lisa Steiner TECHNISCHE UNIVESITÄT DAMSTADT ASS 6 7.7.26 Analysis IV 3. Übung mit Lösungshinweisen (G ) Berechnung einiger Volumina Gruppenübungen
Fachbereich Mathematik Prof. B. Farkas Martin Fuchssteiner Lisa Steiner TECHNISCHE UNIVESITÄT DAMSTADT ASS 6 7.7.26 Analysis IV 3. Übung mit Lösungshinweisen (G ) Berechnung einiger Volumina Gruppenübungen
Experimentalphysik II Elektromagnetische Schwingungen und Wellen
 Experimentalphysik II Elektromagnetische Schwingungen und Wellen Ferienkurs Sommersemester 2009 Martina Stadlmeier 10.09.2009 Inhaltsverzeichnis 1 Elektromagnetische Schwingungen 2 1.1 Energieumwandlung
Experimentalphysik II Elektromagnetische Schwingungen und Wellen Ferienkurs Sommersemester 2009 Martina Stadlmeier 10.09.2009 Inhaltsverzeichnis 1 Elektromagnetische Schwingungen 2 1.1 Energieumwandlung
Physik III im Studiengang Elektrotechnik
 Physik III im Studiengang Elektrotechnik - Schwingungen und Wellen - Prof. Dr. Ulrich Hahn SS 28 Mechanik elastische Wellen Schwingung von Bauteilen Wasserwellen Akustik Elektrodynamik Schwingkreise elektromagnetische
Physik III im Studiengang Elektrotechnik - Schwingungen und Wellen - Prof. Dr. Ulrich Hahn SS 28 Mechanik elastische Wellen Schwingung von Bauteilen Wasserwellen Akustik Elektrodynamik Schwingkreise elektromagnetische
Definition 1.1 (Wirkung) Wir wollen die Kurvenverläufe x(t) finden, die das Funktional
 Wir wollen die Kurvenverläufe x(t) finden, die das Funktional") Christina Schindler Karolina Stoiber Ferienkurs Analysis für Physiker SS 13 A 1 Variationsrechnung 1.1 Lagrange. Art Wir führen die Überlegungen von gestern fort und wollen nun die Lagrangegleichungen.
Christina Schindler Karolina Stoiber Ferienkurs Analysis für Physiker SS 13 A 1 Variationsrechnung 1.1 Lagrange. Art Wir führen die Überlegungen von gestern fort und wollen nun die Lagrangegleichungen.
Die n-dimensionale Normalverteilung
 U. Mortensen Die n-dimensionale Normalverteilung Es wird zunächst die -dimensionale Normalverteilung betrachtet. Die zufälligen Veränderlichen X und Y seien normalverteilt. Gesucht ist die gemeinsame Verteilung
U. Mortensen Die n-dimensionale Normalverteilung Es wird zunächst die -dimensionale Normalverteilung betrachtet. Die zufälligen Veränderlichen X und Y seien normalverteilt. Gesucht ist die gemeinsame Verteilung
BSc PRÜFUNGSBLOCK 2 / D-MAVT VORDIPLOMPRÜFUNG / D-MAVT. Musterlösung
 Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
1. Anfangswertprobleme 1. Ordnung
 1. Anfangswertprobleme 1. Ordnung 1.1 Grundlagen 1.2 Euler-Vorwärts-Verfahren 1.3 Runge-Kutta-Verfahren 1.4 Stabilität 1.5 Euler-Rückwärts-Verfahren 1.6 Differentialgleichungssysteme Prof. Dr. Wandinger
1. Anfangswertprobleme 1. Ordnung 1.1 Grundlagen 1.2 Euler-Vorwärts-Verfahren 1.3 Runge-Kutta-Verfahren 1.4 Stabilität 1.5 Euler-Rückwärts-Verfahren 1.6 Differentialgleichungssysteme Prof. Dr. Wandinger
Name: Gruppe: Matrikel-Nummer:
 Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 1/13/14) Dozent: J. von Delft Übungen: B. Kubala Klausur zur Vorlesung T1: Theoretische Mechanik, SoSe 008 (3. Juli 007) Bearbeitungszeit:
Theoretische Physik 1 (Theoretische Mechanik) SS08, Studienziel Bachelor (170 1/13/14) Dozent: J. von Delft Übungen: B. Kubala Klausur zur Vorlesung T1: Theoretische Mechanik, SoSe 008 (3. Juli 007) Bearbeitungszeit:
Definition 1.2. Eine kontinuierliche Gruppe mit einer endlichen Menge an Parametern heißt endliche kontinuierliche Gruppe. x cosξ sinξ y sinξ cosξ
 8 Gruppentheorie 1 Lie-Gruppen 1.1 Endliche kontinuierliche Gruppe Definition 1.1. Eine Menge G mit einer Verknüpfung m heißt Gruppe, falls folgende Axiome erfüllt sind: (i) Die Operation m, genannt Multiplikation,
8 Gruppentheorie 1 Lie-Gruppen 1.1 Endliche kontinuierliche Gruppe Definition 1.1. Eine Menge G mit einer Verknüpfung m heißt Gruppe, falls folgende Axiome erfüllt sind: (i) Die Operation m, genannt Multiplikation,
Dierentialgleichungen 2. Ordnung
 Dierentialgleichungen 2. Ordnung haben die allgemeine Form x = F (x, x, t. Wir beschränken uns hier auf zwei Spezialfälle, in denen sich eine Lösung analytisch bestimmen lässt: 1. reduzible Dierentialgleichungen:
Dierentialgleichungen 2. Ordnung haben die allgemeine Form x = F (x, x, t. Wir beschränken uns hier auf zwei Spezialfälle, in denen sich eine Lösung analytisch bestimmen lässt: 1. reduzible Dierentialgleichungen:
Laplacetransformation
 Laplacetransformation Fakultät Grundlagen Februar 206 Fakultät Grundlagen Laplacetransformation Übersicht Transformationen Transformationen Bezugssysteme Definition der Laplacetransformation Beispiele
Laplacetransformation Fakultät Grundlagen Februar 206 Fakultät Grundlagen Laplacetransformation Übersicht Transformationen Transformationen Bezugssysteme Definition der Laplacetransformation Beispiele
Einführung in die Physik I. Schwingungen und Wellen 1
 Einführung in die Physik I Schwingungen und Wellen O. von der Lühe und U. Landgraf Schwingungen Periodische Vorgänge spielen in eine große Rolle in vielen Gebieten der Physik E pot Schwingungen treten
Einführung in die Physik I Schwingungen und Wellen O. von der Lühe und U. Landgraf Schwingungen Periodische Vorgänge spielen in eine große Rolle in vielen Gebieten der Physik E pot Schwingungen treten
Katalytische Hyperzyklen
 Katalytische Hyperzyklen Lara Münster 20.12.2011 Literatur: Hofbauer J., Sigmund K. (1998). Evolutionary Games and Population Dynamics. Cambridge University Press: Cambridge Katalytische Hyperzyklen 1
Katalytische Hyperzyklen Lara Münster 20.12.2011 Literatur: Hofbauer J., Sigmund K. (1998). Evolutionary Games and Population Dynamics. Cambridge University Press: Cambridge Katalytische Hyperzyklen 1