Regelungstechnik. Steuerungs- und Reglungstechnik. Created with novapdf Printer ( Please register to remove this message.
|
|
|
- Annegret Lange
- vor 7 Jahren
- Abrufe
Transkript
1 Regelungstechnik 336
2 Definition Steuerung Das Steuern, die Steuerung, ist der Vorgang in einem System, bei dem eine oder mehrere Größen als Eingangsgröße andere Größen als Ausgangsgrößen aufgrund der dem System eigentümlichen Gesetzmäßigkeiten beeinflussen. Kennzeichen für das Steuern ist der offene Wirkungsweg oder ein geschlossener Wirkungsweg, bei dem die durch die Eingangsgrößen beeinflussten Ausgangsgrößen nicht fortlaufend und nicht wieder über die selben Eingangsgrößen auf sich selbst wirken. Störgrößen Führungsgröße Steuerungseinrichtung Stellgröße Steuerstrecke Steuergröße Strukturbild der Steuerung 337
3 Definition Regelung Das Regeln, die Regelung, ist ein Vorgang, bei dem eine Größe, die zu regelnde Größe (Regelgröße), fortlaufend erfasst, mit einer anderen Größe, der Führungsgröße, verglichen und im Sinne einer Angleichung an die Führungsgröße beeinflusst wird. Kennzeichen für das Regeln ist der geschlossene Wirkungsablauf, bei dem die Regelgröße in Wirkungsweg des Regelkreises fortlaufend sich selbst beeinflusst. Störgrößen Führungsgröße Regelungseinrichtung Stellgröße Regelstrecke Regelgröße Strukturbild der Regelung 338
 Manuelle Regelung der Wassertemperatur")
4 Bild 2 Regelkreis mit Regler, Steller, Strecke und Messglied (DIN Teil 4) Manuelle Regelung der Wassertemperatur 339
5 340

6 Vereinfachter Wirkungsplan einer Regelung 341
7 Definition: Regeln Das Regeln die Regelung ist ein Vorgang, bei dem eine Größe, die zu regelnde Größe (Regelgröße) fortlaufend erfasst, mit einer anderen Größe, der Führungsgröße, verglichen und im Sinne einer Angleichung an die Führungsgröße beeinflusst wird. Definition: Regelstrecke Die Regelstrecke ist derjenige Teil des Wirkungswegs, welcher den aufgabengemäß zu beeinflussenden Bereich der Anlage bzw. des Prozesses darstellt. Definition: Stelleinrichtung Die Stelleinrichtung besteht aus Stellantrieb und Stellglied. Sie verbindet den Reglerausgang mit dem Eingang der Regelstrecke 342
8 Definition: Messeinrichtung Die Messeinrichtung wandelt die Aufgabengröße der Regelstrecke in ein weiter verwertbares Signal innerhalb des Regelkreises, in die Regelgröße um. Definition: Erweiterte Regelstrecke Die Regelstrecke bildet zusammen mit der Stell- und Messeinrichtung die erweiterte Regelstrecke. Stellgröße y Eingriffsgröße y A Aufgabengröße x A Regelgröße x Regelstrecke Stelleinrichtung Messeinrichtung 343
9 Definition: Regeleinrichtung Die Regeleinrichtung besteht aus demjenigen Teil des Wirkungswegs eines Regelkreises, der die Beeinflussung der Regelstrecke zur Erfüllung der Regelungsaufgabe über die Stelleinrichtung bewirkt. Führungsgröße w Regeldifferenz e Regler Stellgröße y Regelgröße x Regeleinrichtung Die Regeleinrichtung vergleicht die Führungsgröße W mit der Regelgröße X durch einfache Differenzbildung. 344
10 Definition: Störeinrichtung bzw. Störglied Ein Störglied beschreibt die Dynamik spezifischer Störeinflüsse auf den Regelkreis. Es wird vorwiegend zur theoretischen Untersuchung von Regelungen benutzt. Z. B. Versorgungsstörungen Z. B. Laststörungen Z. B. Messstörungen 345
 Regelungsarten 346")
11 Zeitplanregelung w = f (P) Regelungsarten 346

12 Beispiel einer Festwertregelung 347

13 Festwertregelung 348

14 Beispiel einer Folgeregelung 349

15 350
16 351

17 Blockschaltbild zum Beispiel der Folgeregelung 352
18 Bei einer Folgeregelung bewirkt der Regler, dass die Regelgröße dem vorgegebenen Führungsgrößenverlauf folgt Zum Aufbau und Einstellen eines Regelkreises müssen die Eigenschaften der Regelkreisglieder bekannt sein. 353
19 Temperaturregelung im Bügeleisen 354
20 Wirkungsplan Bügeleisen Verhalten der Temperaturregelung im Bügeleisen 355
21 Der allgemeine Regelkreis 356
22 Störgröße z v (Versorgungstörung) Störgröße z L (Laststörung) Führungsgröße w Regeldifferenz e Regler Stellgröße y Erweiterte Regelstrecke Regelgröße x Der standardisierte einschleifige Regelkreis 357

23 Normierte Signale Die Kleinsignale dienen dazu die Dynamik der Regelung in einem Arbeitspunkt AP zu beschreiben. Der Arbeitspunkt repräsentiert den Wert der Prozessgröße, in dessen unmittelbarer Umgebung der Prozess betrieben wird Arbeitspunkt AP 358

24 Größen eines Regelkreises 359
25 Definition: Regelstrecke Die Regelstrecke ist derjenige Teil des Wirkungsweges, welcher den aufgabengemäß zu beeinflussenden Teil der Anlage darstellt. Die Regelstrecke liegt zwischen Stellort und Messort Y A Stellort Regelstrecke X A Messort Regelstrecke ohne Ausgleich z.b. Fahrstuhl Regelstrecke mit Ausgleich z.b. Niveauregelung 360
26 Verhalten von Regelstrecken 361
27 Arten von Regeleinrichtungen 362

28 K = Propotionalbeiwert oder P Verstärkungsfaktor Sprungantwort und Symbol eines P - Gliedes 363
29 P-Regler sind Zweipunktregler und werden als unstetige Regler bezeichnet Der P-Regler besteht ausschließlich aus einem proportionalen Anteil der Verstärkung K. P Mit seinem Ausgangssignal u ist er proportional dem Eingangssignal e. Das Übergangsverhalten lautet u(t) = K P e(t). U Die Übertragungsfunktion lautet (s) = K E P 364

30 Getriebe als P-Regler 365
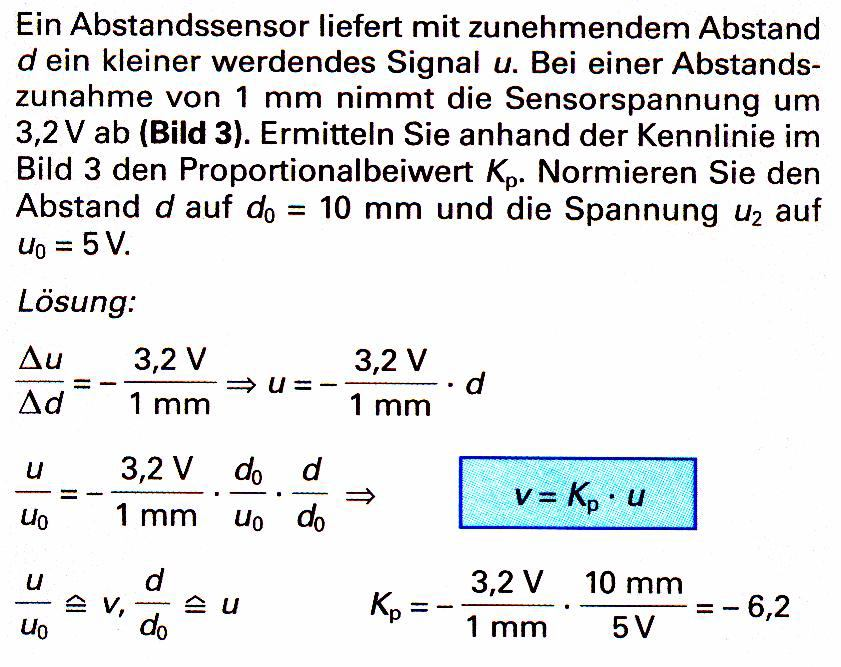
31 Beispiel Sensorkennlinie 366
32 Schwingungseffekt bei unstetigen Reglern 367
33 Regelgüte bei unstetigen Reglern 368
34 Graphische Konstruktion des Regelgrößenverlaufs 369
35 Kenngrößen unstetiger Regleinrichtungen 370
36 Definition: Schwankungsbreite X Die Schwankungsbreite X einer unstetigen Regelung stellt den Bereich der Regelgröße x(t) dar, innerhalb dessen sie periodische Schwankungen bei konstant anliegender Führungsgröße ausführt. Definition: Unstetiger Regler Ein unstetiger Regler erzeugt als Reaktion auf ein kontinuierlichanaloges Eingangssignal nur eine beschränkte Anzahl von Stellwerten für die Regelstrecke Definition: Stetiger Regler Ein stetiger Regler generiert aus dem kontinuierlich-analogen Eingangssignal (der Regeldifferenz) ein kontinuierlich-analoges Stellsignal, das jeden Wert des Stellbereiches annehmen kann. Er greift über das Stellsignal stetig in die Streckenprozesse ein. 371
37 Anforderungen an Regelungen a) Genauigkeit (Stationäre Regelgröße) Der soll gewährleisten, dass die Regelgröße x(t) der Führungsgröße w(t) asymptotisch folgt. e( ) = lim (e(t)) = lim (w(t) x(t)) = 0 8 t 8 t b) Schnelligkeit (Dynamische Regelgüte) 8 Bei zeitlicher Änderung der Führungsgröße w(t) soll die Regelgröße x(t) unmittelbar folgen c) Stabilität Ein Regelkreis hat immer stabil zu sein! Beim Anfahren können Überraschungen auftreten! d) Robustheit Ein Regelkreis hat robust zu sein! Der Regler muss so ausgelegt sein, dass er auch bei Änderung der Parameter während des Betriebes stabil arbeitet. Wird die Stabilitätsforderung erfüllt, spricht man von robuster Stabilität. 372
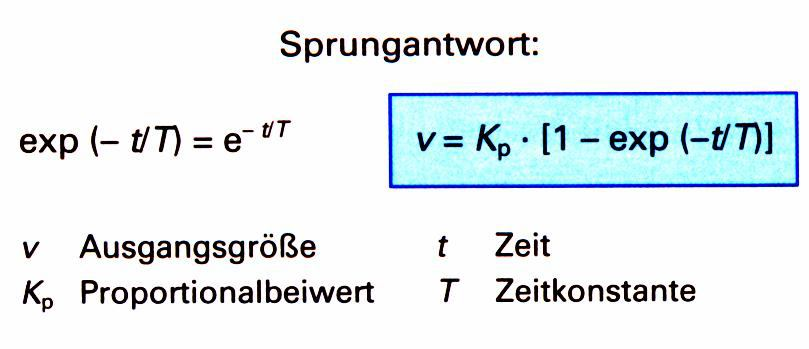
38 Proportionalglied mit Verzögerung 1. Ordnung (PT - Glied) 1 Ausgangssignal ist nach Verzögerung dem Eingangssignal proportional. 373

39 u Sprungantwort und Symbol des PT - Gliedes 1 374
40 375

41 Druckbehälter als Beispiel für PT - Glied 1 376

42 Erwärmung eines Wasserbehälters als Beispiel für PT - Verhalten 1 377
43 Beispiel des Verhaltens eines PT - Gliedes bei sinusförmigen Eingangssignal 1 378

44 Bode-Diagramm eines PT - Gliedes 1 379
45 Proportionalglied mit Verzögerung 2. Ordnung (PT - Glied) 2 Ein PT 2 - Glied setzt sich aus zwei in Reihe geschalteten PT 1- Gliedern zusammen 380

46 Funktion des PT - Glied 2 381

47 Strecken mit Verzögerung zweiter Ordnung und Sprungantwort 382

48 Verhalten eines Schwingungsgliedes 383
49 Elektrischer Reihenschwingkreis als Beispiel eines Schwingungskreises 384

50 Sprungantwort eines Schwingungsgliedes 385
51 Sprungantwort eines Schwingungsgliedes in Abhängigkeit der Dämpfung D 386
52 Verhalten von PT 2- Glied und Schwingungsglied bei sinusförmigem Eingangssignal 387
53 Definition: Unstetige Regler mit Rückkopplung Bei einem unstetigen Regler mit Rückkopplung wird die Stellgröße des Reglers über ein Zeitglied subtraktiv auf seinen Eingang zurückgekoppelt. Regeldifferenz e - e r Unstetiger Regler Stellgröße y y r Zeitglied Als Ergebnis der Rückkopplung erzielt man eine vorgetäuschte Erhöhung der Regelgröße x(t). Auf den Schaltregler wirkt nun die modifizierte Regeldifferenz e = e y = (w x) y = w (x + y ) r r r r Unstetige Regler mit Rückkupplung bezeichnet man auch als stetigähnliche Regler 388
54 Unstetiger Regler mit Rückkopplung 389

55 Beispiel: Regler ohne Rückkopplung Beispiel: Regler mit Rückkopplung Temperaturregelung im Bügeleisen 390
56 Kennlinie eines P - Reglers 391
57 Festlegung des Proportionalbereichs bei einer Füllstandsregelung 392
58 Störverhalten des P- Reglers 393

59 Historische Fliehkraftregelung Abstrahierung: Meßglied Sollwert Regelstrecke Regler Stellglied 394

60 Historischer Fliehkraftregler 395

61 Elektronischer P - Regler 396
62 Zusammenfassung der Kennzeichen für P - Regler 1. Der P Regler kann Störungen der Regelstrecke nicht ausregeln. Er ist deshalb ungenau und hinterlässt eine bleibende Regeldifferenz. 2. Der P Regler reagiert unmittelbar und schnell auf jede Veränderung der Regelgröße Der P Regler arbeitet ungenau 397
63 I Regler (Integralglied) I-Glieder erzeugen ein Ausgangssignal, das dem Integral des Eingangssignales entspricht 398
64 Sprungantwort und Symbol des I -Gliedes 399
65 1 v = t = K t TI I v Ausgangsgröße T I Integrationszeitkonstante K I Integrationsbeiwert t Zeit Reglergleichung bei einem I - Regler 400
66 Verhalten von I Regler bei sinusförmigem Eingangssignal 401

67 Integralglieder 402
68 Führungsverhalten des I -Reglers 403
69 Zusammenfassung der Kennzeichen für I - Regler 1. Der I Regler stellt die Regelgröße exakt auf die Führungsgröße ein. 2. Im Gegensatz zu einem P Regler benötigt der I Regler um die Integrierzeit T länger für den Regelvorgang. 3. Zur exakten Erreichung der Führungsgröße neigt ein I Regler zu Schwingungen. Der I Regler regelt präzise, aber langsam und neigt zum Schwingen 404
70 D Regler (Differenzierglied) Ein D Regler erzeugt ein Ausgangssignal, das dem Differentialquotienten des Eingangssignales entspricht. 405

71 Verhalten von D Regler auf sinusförmige Eingangssignale 406

72 Bode Diagramm eines D - Reglers 407
73 Zusammenfassung der Kennzeichen für D - Regler Der D Regler regelt zeitlich konstante Regeldifferenzen nicht aus, gleich wie groß diese auch ausfallen. Der D Regler ist für sich alleine nicht zu gebrauchen! 408
74 Totzeitglied (T - Glied) t Totzeitglieder treten immer bei Signalverarbeitung mittels Computer auf. 409
75 Sprungantwort von Totzeitgliedern 410

76 Regelkreise mit Totzeitglieder 411
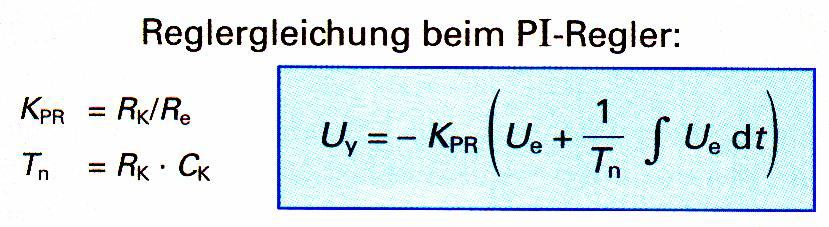
77 Zusammenwirken mehrerer Regelkreisglieder 1. PI - Regler PI Regler haben eine Stellgröße aus zwei Anteilen. Ein Anteil der Sprungantwort ist proportional zur Regeldifferenz (P-Anteil), der andere (I-Anteil) ist zur Regeldifferenz und zur Zeit proportional. 412

78 Elektronischer PI - Regler 413
79 414
80 Sprungantwort des PI - Reglers 415
81 Führungsverhalten des PI - Reglers 416
82 Beispiel eines PI - Reglers 417
83 Zusammenfassung der Kennzeichen für PI - Regler 1. Der P Reglerteil versucht auftretende Regeldifferenz schnell abzufangen, ohne dass er sie vollständig eliminiert. 2. Anschließend beseitigt die I Reglerkomponente die restliche Regeldifferenz. Der PI Regler arbeitet schnell und präzise! 418
84 Zusammenwirken mehrerer Regelkreisglieder 2. PD - Regler Der ideale PD Regler addiert die Wirkung von P- und D Reglern. Seine Systemgleichung lautet: Y(t) = K PR(e(t) + T VR e(t)) 419
85 Sprungantwort eines PD - Reglers 420
86 Zusammenfassung der Kennzeichen für PD - Regler 1. Der D Anteil wendet durch Vorhalt die größte Gefahr von der Regelstrecke ab. 2. Der P Regelanteil bestimmt sein langfristiges Verhalten, weshalb er ungenau arbeitet. Der PD Regler reagiert sehr schnell, aber ungenau 421
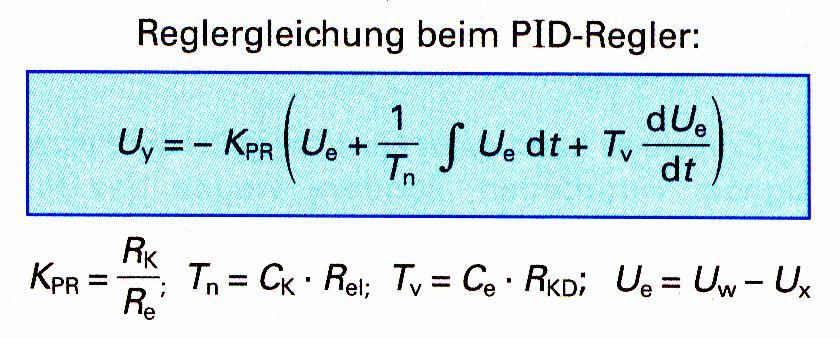
87 Zusammenwirken mehrerer Regelkreisglieder 3. PID - Regler Der PID Regler kombiniert alle drei Basisregler zu einem universellen Regler durch Parallelschaltung von P- I- und D - Reglern 422

88 Sprungverhalten und Symbol des PID - Reglers 423
89 424
90 Sprungantwort eines PID - Reglers 425
91 Führungsverhalten eines PID - Reglers 426

92 PID Regler mit Operationsverstärker 427
93 Zusammenfassung der Kennzeichen für PID - Regler 1. Der PID Regler kann optimal an verschiedene Regelstrecken angepasst werden. 2. Er reagiert auf Regeldifferenzen durch schnelles Vorhalten, gezieltes Anfahren in die Nähe des Sollwerts und abschließendem präzisen Ausregeln der Regeldifferenz. Der PID Regler kann als Universalregler bezeichnet werden! 428
94 Vergleich des Antwortverhaltens der verschiedenen Reglertypen 429
95 Gegenüberstellung der verschiedenen Reglertypen 430

96 Regelkreis Fahrzeuglenkung 431
97 Ergänzung zur Regelungstechnik mathematische Erfassung
98 Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig das Zeitverhalten der Strecke so kompensieren, dass die Regelgröße den Sollwert in gewünschter Weise von aperiodisch bis gedämpft schwingend erreicht. Falsch eingestellte Regler machen den Regelkreis zu langsam, führen zu einer großen Regelabweichung oder zu ungedämpften Schwingungen der Regelgröße und unter Umständen zur Zerstörung der Regelstrecke. Neben dem Einschwingverhalten der Regelgröße auf den Sollwert interessiert: Regelabweichung bei statischen und dynamischen Eingangsgrößen Regelabweichung bei statischen und dynamischen Störgrößen
99 Das Verhalten der Regelkreisglieder wird durch Differentialgleichungen beschrieben. Bei linearen Systemen ist es vorteilhaft, die Regelkreisglieder nicht im Zeitbereich, sondern im Frequenzbereich als zu betrachten. Übertragungsfunktion Der Frequenzgang ist ein Spezialfall der Übertragungsfunktion. Er kennzeichnet das Verhalten eines Systems mit erzwungener Dauerschwingung und der imaginären Frequenz p=jω. Beide Begriffe unterscheiden sich nur durch die Entstehungsweise. Der entscheidende Vorteil der Umwandlung der Funktionen vom Zeitbereich zum Frequenzbereich ist die algebraische Behandlung der Übertragungsfunktionen.
100 Sämtliche Daten für die Kriterien der Stabilität wie Pole, Nullstellen, Verstärkung und Zeitkonstanten lassen sich aus den Übertragungsfunktionen der Regelkreisglieder ableiten. Digitale Regler haben den Vorteil einer universellen Anpassung an die unterschiedlichsten Regelaufgaben, jedoch verlangsamen sie den Regelprozess durch die Abtastzeit der Regelgröße und Rechenzeit im Einsatz bei schnellen Regelstrecken. Für einschleifige lineare Regelsysteme kommen je nach Verhalten der Regelstrecke meistens die klassischen analogen P-, PI-,PD- und PID-Regler zur Anwendung. Viele nicht stabile Regelstrecken, die z. B. durch positive Rückkopplungseffekte (Mitkopplung) entstehen können, sind ebenfalls mit diesen Reglern beherrschbar.
101 Klassische lineare Regler Die Übertragungsfunktion eines Systems entsteht z. B. durch Austausch der zeitabhängigen Terme einer Differentialgleichung mit den Laplace- Transformierten. Voraussetzung ist, dass die Anfangsbedingung des Systems Null ist. Lautet beispielsweise die Differentialgleichung eines PID-Reglers: Die Terme e(t), deren Ableitung und Integral werden durch die Laplace- Transformierten f(s) ersetzt:
102 Die Übertragungsfunktion ist definiert als das Verhältnis von Ausgang U zu Eingang E einer Funktion:
103 In der linearen Regelungstechnik ist es eine willkommene Tatsache, dass praktisch alle vorkommenden regulären (stabilen) Übertragungsfunktionen bzw. Frequenzgänge von Regelkreisgliedern auf folgende 3 Grundformen geschrieben bzw. zurückgeführt werden können. Sie haben eine völlig unterschiedliche Bedeutung, ob sie im Zähler oder im Nenner einer Übertragungsfunktion stehen: (Zähler: Differenzierer, D-Glied, Nenner: Integrator, I-Glied) (Zähler: PD-Glied; Nenner: Verzögerung, PT1-Glied) (Zähler: PD-Glied 2. Ordnung, Nenner: Schwingungsglied für D<=0) T = Zeitkonstante, s = komplexe Frequenz = Laplace-Operator, D= Dämpfungsgrad, Die Zeitkonstanten im Frequenzbereich entsprechen einer dimensionslosen Zahl.
104 Bei so genannten nichtregulären (instabilen) Systemen lauten die Übertragungsfunktionen: und Liegen Zähler- oder Nennerpolynome der Übertragungsfunktion vor, müssen erst die Nullstellen je nach Grad der Polynome gegebenenfalls mit aufwendigen Rechenverfahren ermittelt werden, um die Polynome in faktorielle Grundglieder zu zerlegen.
105 Regelsysteme können definiert werden als: Reihenschaltung: Es gilt das Superpositionsprinzip. Die Systeme in Produktdarstellung können in der Reihenfolge beliebig verschoben werden, Systemausgänge werden nicht durch nachfolgende Eingänge belastet. Parallelschaltung: Gegen- und Mitkopplung:
106 Die linearen Standard-Regler wie: P-Regler (P-Glied) mit proportionalem Verhalten, I-Regler (I-Glied) mit integralem Verhalten, PI-Regler (1 I-Glied, 1 PD-Glied) mit proportionalem und Integralem Verhalten, PD-Regler (PD-Glied) mit proportionalem und differentialem Verhalten, PID-Regler (1 I-Glied, 2 PD-Glieder) mit proportionalem, integralem und differentialem Verhalten, lassen sich bereits mit den ersten beiden der genannten Terme der Grundformen der Übertragungsfunktionen in faktorieller Darstellung beschreiben.
107 Beispielsweise lautet die Produktdarstellung eines PI-Reglers: es handelt sich also bei einem PI-Regler um einen Regler mit einem P-Glied und einem I-Glied mit der Verstärkung KPI = 1 / Tn
108 Reglereigenschaften P-Regler: Wegen des fehlenden Zeitverhaltens reagiert der P-Regler unmittelbar, jedoch ist sein Einsatz sehr begrenzt, weil die Verstärkung je nach Verhalten der Regelstrecke stark reduziert werden muss. Der Regelfehler einer Sprungantwort nach dem Einschwingen der Regelgröße als bleibenden Regelabweichung beträgt 100 / Kp [%], wenn kein I-Glied in der Strecke enthalten ist. Bei einer Regelstrecke mit einem T1-Glied (Verzögerungsglied 1. Ordnung) kann die Verstärkung theoretisch unendlich hoch gewählt werden, weil ein Regelkreis mit einer solcher Regelstrecke nicht instabil werden kann. Dies kann anhand des Stabilitätskriterium von Nyquist nachgeprüft werden. Die bleibende Regelabweichung ist praktisch vernachlässigbar. Das Einschwingen der Regelgröße ist aperiodisch. Bei einer Regelstrecke mit 2 T1-Gliedern und 2 dominanten Zeitkonstanten sind die Grenzen dieses Reglers erreicht. Zum Beispiel ergibt die Sprungantwort bei Kp = 10 eine bleibende Regelabweichung von 10 %, eine erste Überschwingung von 35 % bei einem Dämpfungsgrad D = 0,18. Mit steigender Verstärkung wird die Regelabweichung kleiner, die Überschwingung größer und die Dämpfung schlechter. Diese Daten gelten für 2 gleiche Zeitkonstanten und sind unabhängig von deren Größe.
109 I-Regler: Der I-Regler ist auf Grund seiner (theoretisch) unendlichen Verstärkung ein genauer aber langsamer Regler. Er hinterlässt keine bleibende Regelabweichung. Weil er eine zusätzliche Nullstelle mit einem Phasenwinkel von 90 im aufgeschnittenen Regelkreis einfügt, kann nur eine schwache Verstärkung KI bzw. große Zeitkonstante Tn eingestellt werden. Für eine Regelstrecke mit 2 T1-Gliedern kann bei 2 dominanten Zeitkonstanten bereits volle Instabilität bei geringer Verstärkung KI entstehen. Für diese Art Regelstrecken ist der I-Regler kein geeigneter Regler. Bei einer Regelstrecke mit I-Glied im Regelkreis ohne zusätzliche Verzögerungen gilt für alle Werte der Kreisverstärkung Instabililität mit konstanter Amplitude. Die Schwingfrequenz ist eine Funktion von K (für K>0). Der I-Regler ist die erste Wahl für eine Regelstrecke mit dominanter Totzeit Tt oder Totzeit ohne weitere T1-Glieder. Evt. kann ein PI-Regler eine minimale Verbesserung erzielen. Optimale Einstellung bei vernachlässigbaren Verzögerungen
110 D-Glied: Es kann nur differenzieren, nicht regeln. Es wird vorzugsweise als Komponente in PD- und PID-Reglern eingesetzt. Es kann theoretisch als ideales D-Glied ein I-Glied einer Regelstrecke vollständig bei gleichen Zeitkonstanten kompensieren. Eine lineare Anstiegsfunktion am Eingang bewirkt eine konstante Ausgangsgröße, die proportional der Zeitkonstante Tv ist. Die Sprungantwort ist eine Stoßfunktion, die beim realen D-Glied eine endliche Größe aufweist und nach einer e-funktion auf Null abklingt.
111 PI-Regler: Er kann mit dem PD-Glied ein T1-Glied der Strecke kompensieren und damit die Regelstrecke vereinfachen. Durch das I-Glied wird im stationären Zustand die Regelabweichung zu Null. Nachteilig ist die Wirkung einer zusätzlichen Polstelle mit 90 Phasenwinkel in dem offenen Regelkreis. Deshalb ist der PI-Regler kein schneller Regler. Es gibt nur 2 Einstellparameter, Kpi und TN Er kann optimal an einer Regelstrecke höherer Ordnung eingesetzt werden, von der nur die Sprungantwort bekannt ist. Durch Ermittlung der Ersatztotzeit TU = Verzugszeit und der Ersatzverzögerungs-Zeitkonstante TG = Ausgleichszeit kann das PD-Glied des Reglers die Zeitkonstante TG kompensieren. Für die I-Regler- Einstellung der verbleibenden Regelstrecke mit Ersatztotzeit gelten die bekannten Einstellvorschriften. Er kann eine Regelstrecke mit 2 dominanten Zeitkonstanten von T1-Gliedern regeln, wenn die Kreisverstärkung reduziert wird und die längere Dauer des Einschwingens der Regelgröße auf den Sollwert akzeptiert wird. Dabei kann mit Kpi jeder gewünschte Dämpfungsgrad D eingestellt werden, von aperiodisch (D=1) bis schwach gedämpft schwingend (D gegen 0).
112 PD-Regler: Er kann ein T1-Glied der Regelstrecke kompensieren und damit die Regelstrecke vereinfachen. Der ideale PD-Regler kann gegenüber dem P-Regler bei einer Regelstrecke mit 2 T1-Gliedern theoretisch mit unendlich hoher Verstärkung arbeiten. Die bleibende Regelabweichung ist praktisch vernachlässigbar. Das Einschwingen der Regelgröße ist aperiodisch. Der Regelfehler einer Sprungantwort nach dem Einschwingen der Regelgröße als bleibenden Regelabweichung beträgt 100 / Kp [%].

113 PID - Regler Grundsätzliches Strukturbild eines PID-Reglers Sprungantwort PID-Regler

114 Andere Sprungantwort eines PID-Reglers Der PID-Regler besteht aus den Anteilen des P-Gliedes Kp, des I-Gliedes und des D-Gliedes. Er kann sowohl aus reiner Parallelstruktur oder aus einer gemischten Reihen- und Parallelstruktur definiert werden. Wichtig ist, dass in beiden Fällen die Definition der Nachstellzeit Tn und Vorhaltezeit Tv übereinstimmt und letztlich das gleiche Ergebnis erreicht wird.
115 Bei der reinen Parallelstruktur ist es deshalb notwendig, dass das I-Glied und das PD-Glied mit der Verstärkung Kp multipliziert wird. Anschließend wird Kp dann als gemeinsamer Faktor vor den Klammerausdruck gesetzt. Differentialgleichung:
116 Übertragungsfunktion in Summendarstellung: Wird der Klammerausdruck der Gleichung auf einen gemeinsamen Nenner gebracht, entsteht die Produktdarstellung:
117 Das Zählerpolynom kann durch die Bestimmung der Nullstellen aufgelöst werden. Damit lautet die ideale Übertragungsfunktion in Produktdarstellung: Mit der Reglerverstärkung: Wie beim D-Glied und PD-Regler gilt auch hier für ein System, dessen Übertragungsfunktion im Zähler eine höher Ordnung als im Nenner aufweist, als technisch nicht realisierbar. Es ist nicht möglich, beliebig schnelle Eingangssignale wie z. B. beim Eingangssprung, unvertretbar hohe Stellgrößenamplituden zu verwirklichen. Für die Realisierung des PID-Reglers in digitaler Technik, genügt die Anwendung der idealen Übertragungsfunktion.
118 Eigenschaften des PID-Reglers: Er ist von den Standard-Reglern am anpassungsfähigsten, hat keine bleibende Regelabweichung bei Führungs- und Störgrößensprung und kann 2 Verzögerungen (T1-Glieder) der Regelstrecke kompensieren und damit die Regelstrecke vereinfachen. Nachteilig ist durch das I-Glied bedingt, dass eine zusätzliche Polstelle mit 90 Phasenwinkel in dem offenen Regelkreis eingefügt wird, was eine Reduzierung der Kreisverstärkung KPID bedeutet. Deshalb ist der PID-Regler (wie auch der PI-Regler) kein schneller Regler. Es gibt nur 3 Einstellparameter, KPID, T1 (bzw. TN), T2 (bzw.tv) des idealen Reglers. Er kann eine Regelstrecke mit 3 dominanten Zeitkonstanten von T1-Gliedern regeln, wenn die Kreisverstärkung reduziert wird und die längere Dauer des Einschwingens der Regelgröße auf den Sollwert akzeptiert wird. Dabei kann mit KPID jeder gewünschte Dämpfungsgrad D eingestellt werden, von aperiodisch (D=1) bis schwach gedämpft schwingend (D gegen 0). Er kann eine Regelstrecke mit I-Glied und einem T1-Glied optimal regeln. Der PID-Regler ist an einer Regelstrecke mit dominanter Totzeit ungeeignet.
Ergänzung zur Regelungstechnik
 Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik *v Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern 13 1.1.2 Regeln
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik *v Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern 13 1.1.2 Regeln
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 2., korrigierte Auflage Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 2., korrigierte Auflage Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern
Autonome Mobile Systeme
 Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Regelung. Max Meiswinkel. 8. Dezember Max Meiswinkel () Regelung 8. Dezember / 12
 Regelung 8. Dezember / 12") Regelung Max Meiswinkel 8. Dezember 2008 Max Meiswinkel () Regelung 8. Dezember 2008 1 / 12 Übersicht 1 Einführung Der Regelkreis Regelschleife 2 stetige Regelung P-Regler I-Regler PI-Regler PD-Regler
Regelung Max Meiswinkel 8. Dezember 2008 Max Meiswinkel () Regelung 8. Dezember 2008 1 / 12 Übersicht 1 Einführung Der Regelkreis Regelschleife 2 stetige Regelung P-Regler I-Regler PI-Regler PD-Regler
Praktische Regelungstechnik
 Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 7., überarbeitete Auflage Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Einführung 13 1.1 Steuern - Regeln
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 7., überarbeitete Auflage Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Einführung 13 1.1 Steuern - Regeln
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Alexander Schaefer 1 Inhalt Was ist Regelungstechnik? Modellbildung Steuerung Anwendungsbeispiel Regelung Reglertypen 2 Was ist Regelungstechnik? Ingenieurwissenschaft
Einführung in die Regelungstechnik Alexander Schaefer 1 Inhalt Was ist Regelungstechnik? Modellbildung Steuerung Anwendungsbeispiel Regelung Reglertypen 2 Was ist Regelungstechnik? Ingenieurwissenschaft
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen)
") Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Zusammenfassung der 9. Vorlesung
 Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Zusammenfassung der 9. Vorlesung Analyse des Regelkreises Stationäres Verhalten des des Regelkreises Bleibende Regelabweichung für ffür r FFührungs- und und Störverhalten Bleibende Regelabweichung für
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
4. Der geschlossene Regelkreis mit P-Strecke und P-Regler
 FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
Vorwort zur 14. Auflage 14 Vorwort zur 13. Auflage 14
 Inhaltsverzeichnis Vorwort zur 14. Auflage 14 Vorwort zur 13. Auflage 14 I. Analoge Regelungstechnik Teil 1. Grundbegriffe 1.1 Einleitung 17 1.2 Benennungen und Begriffe 18 1.3 Aufgabe der Regelung 19
Inhaltsverzeichnis Vorwort zur 14. Auflage 14 Vorwort zur 13. Auflage 14 I. Analoge Regelungstechnik Teil 1. Grundbegriffe 1.1 Einleitung 17 1.2 Benennungen und Begriffe 18 1.3 Aufgabe der Regelung 19
Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung
 Karl-Heinz Reuther Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung Berichte aus der Steuerungs- und Regelungstechnik Karl-Heinz Reuther Grundlagen
Karl-Heinz Reuther Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung Berichte aus der Steuerungs- und Regelungstechnik Karl-Heinz Reuther Grundlagen
Optimierung von Regelkreisen. mit P-, PI und PID Reglern
 mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
Zusammenfassung der 7. Vorlesung
 Zusammenfassung der 7. Vorlesung Steuer- und Erreichbarkeit zeitdiskreter Systeme Bei zeitdiskreten Systemen sind Steuer-und Erreichbarkeit keine äquivalente Eigenschaften. Die Erfüllung des Kalmankriteriums
Zusammenfassung der 7. Vorlesung Steuer- und Erreichbarkeit zeitdiskreter Systeme Bei zeitdiskreten Systemen sind Steuer-und Erreichbarkeit keine äquivalente Eigenschaften. Die Erfüllung des Kalmankriteriums
Regelungstechnik Aufgaben
 Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
SYNTHESE LINEARER REGELUNGEN
 Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
Synthese Linearer Regelungen - Formelsammlung von 8 SYNTHESE LINEARER REGELUNGEN FORMELSAMMLUNG UND MERKZETTEL INHALT 2 Grundlagen... 2 2. Mathematische Grundlagen... 2 2.2 Bewegungsgleichungen... 2 2.3
G R. Vorlesung 9. Identifiziert durch Sprungantwort. Sinnvoll selbst gestalten. Regler. Einschleifiger Regelkreis: Xd(s) W(s) Y(s) U(s) GFeder S
 W(s) Y(s) U(s) GFeder S") Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Regelungstechnik I. Heinz JUnbehauen. Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme. 3., durchgesehene Auflage
 Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Taschenbuch der Regelungstechnik
 Taschenbuch der Regelungstechnik Mit MATLAB und Simulink von Holger Lutz, Wolfgang Wendt überarbeitet Taschenbuch der Regelungstechnik Lutz / Wendt schnell und portofrei erhältlich bei beck-shop.de DIE
Taschenbuch der Regelungstechnik Mit MATLAB und Simulink von Holger Lutz, Wolfgang Wendt überarbeitet Taschenbuch der Regelungstechnik Lutz / Wendt schnell und portofrei erhältlich bei beck-shop.de DIE
Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski. Regelschaltungen. Sprungantwort und Verhalten von Regelstrecken
 Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski Regelschaltungen Sprungantwort und Verhalten von Regelstrecken Inhaltsverzeichnis 1 Sprungantwort von Reglern 3 1.1 Reglertypen............................................
Mathias Arbeiter 09. Juni 2006 Betreuer: Herr Bojarski Regelschaltungen Sprungantwort und Verhalten von Regelstrecken Inhaltsverzeichnis 1 Sprungantwort von Reglern 3 1.1 Reglertypen............................................
Versuchsanleitung. Labor Mechatronik. Versuch DV_5 Regelkreis mit analogen Reglern. Labor Mechatronik Versuch BV-5 analoge Regelung
 Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Ausarbeitung Regelungstechnik
 Ausarbeitung Regelungstechnik by Poth & Fiechtner 2005 by Poth & Fiechtner Seite 1/14 Inhalt Grundsätzliches zur Regelungstechnik Untersuchung des als Regelstrecke verwendeten Heizlüfters Regelkreis als
Ausarbeitung Regelungstechnik by Poth & Fiechtner 2005 by Poth & Fiechtner Seite 1/14 Inhalt Grundsätzliches zur Regelungstechnik Untersuchung des als Regelstrecke verwendeten Heizlüfters Regelkreis als
INSTITUT FÜR REGELUNGSTECHNIK
 Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Optimierung Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Herbert Bernstein. Regelungstechnik. Theorie und Praxis. mit WinFACT und Multisim. Elektor-Verlag, Aachen
 Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Regelungs-und Steuerungstechnik
 Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen Beschreibung dynamischer Systeme Regelkreis
Modul: Labor und Statistik OPTIMIERUNG M.SC.KRUBAJINI KRISHNAPILLAI; PROF.DR.ROBBY ANDERSSON Regelungs-und Steuerungstechnik Inhaltsverzeichnis Einleitung Grundlagen Beschreibung dynamischer Systeme Regelkreis
Methoden der Regelungstechnik
 FELJC Methoden_der_Regelungstechnik_3.odt 1 Methoden der Regelungstechnik 5) Störgrößenaufschaltung a) Allgemeines Die Störgrößenaufschaltung ist eine Kombination aus Steuerung und Regelung. Zur Erinnerung:
FELJC Methoden_der_Regelungstechnik_3.odt 1 Methoden der Regelungstechnik 5) Störgrößenaufschaltung a) Allgemeines Die Störgrößenaufschaltung ist eine Kombination aus Steuerung und Regelung. Zur Erinnerung:
Regelungstechnik und Simulationstechnik mit Scilab und Modelica
 Peter Beater Regelungstechnik und Simulationstechnik mit Scilab und Modelica Eine beispielorientierte Einführung für Studenten und Anwender aus dem Maschinenbau Inhaltsverzeichnis Begriffe und Formelzeichen
Peter Beater Regelungstechnik und Simulationstechnik mit Scilab und Modelica Eine beispielorientierte Einführung für Studenten und Anwender aus dem Maschinenbau Inhaltsverzeichnis Begriffe und Formelzeichen
a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.
 Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.") 144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
Reglerentwurf mit dem Frequenzkennlinienverfahren
 Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Dies ist der letzte Termin in diesem Jahr 17.12.2004 fällt aus Nächste Termine: 14.1., 28.1.,
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Dies ist der letzte Termin in diesem Jahr 17.12.2004 fällt aus Nächste Termine: 14.1., 28.1.,
Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis. Wintersemester 2014 Prof. Dr.-Ing. habil. Klaus-Peter Döge
 Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis Wintersemester 04 Prof. Dr.-Ing. habil. Klaus-Peter Döge Regelkreis nach DIN 96 Teil 5 Vereinfachter Regelkreis 3 Einführendes Beispiel
Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis Wintersemester 04 Prof. Dr.-Ing. habil. Klaus-Peter Döge Regelkreis nach DIN 96 Teil 5 Vereinfachter Regelkreis 3 Einführendes Beispiel
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik FH Jena
 Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Regelungstechnik für Ingenieure
 Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
1 Reglerentwurf nach dem Betragsoptimum
 Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (9) Basiswissen Regelungstechnik Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (9) Basiswissen Regelungstechnik Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s)
 P (s)") 1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
1. Teilklausur SS 16 Gruppe A Name: Matr.-Nr.: Für beide Aufgaben gilt: Gegeben sei folgender Regelkreis mit der Führungsgröße r, dem Regelfehler e und der Ausgangsgröße y: r e R(s) P (s) y Aufgabe 1 (6
Vorlesung 13. Die Frequenzkennlinien / Frequenzgang
 Vorlesung 3 Die Frequenzkennlinien / Frequenzgang Frequenzkennlinien geben das Antwortverhalten eines linearen Systems auf eine harmonische (sinusförmige) Anregung in Verstärkung (Amplitude) und Phasenverschiebung
Vorlesung 3 Die Frequenzkennlinien / Frequenzgang Frequenzkennlinien geben das Antwortverhalten eines linearen Systems auf eine harmonische (sinusförmige) Anregung in Verstärkung (Amplitude) und Phasenverschiebung
Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1. 1. Methoden zur Untersuchung von Regelstrecken
 FELJC P_I_D_Tt.odt 1 Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1 (Zum Teil Wiederholung, siehe Kurs T2EE) 1. Methoden zur Untersuchung von Regelstrecken Bei der Untersuchung einer
FELJC P_I_D_Tt.odt 1 Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1 (Zum Teil Wiederholung, siehe Kurs T2EE) 1. Methoden zur Untersuchung von Regelstrecken Bei der Untersuchung einer
Beispiele für Regelungen
 Dozent: Dr.-Ing. Jörg Kahlert Kontaktdaten: Ingenieurbüro Dr. Kahlert, Ludwig-Erhard-Str. 45 D-59065 Hamm E-Mail: jk@kahlert.com Elektronischer vs. mechanischer Raumthermostat 1/2 Vorderansicht Vorderansicht
Dozent: Dr.-Ing. Jörg Kahlert Kontaktdaten: Ingenieurbüro Dr. Kahlert, Ludwig-Erhard-Str. 45 D-59065 Hamm E-Mail: jk@kahlert.com Elektronischer vs. mechanischer Raumthermostat 1/2 Vorderansicht Vorderansicht
Bild 86. Eingrößenregelung. w Führungsgröße (Sollwert), e Regeldifferenz, y Stellgröße, z Störgröße, x Regelgröße (Istwert).
, e Regeldifferenz, y Stellgröße, z Störgröße, x Regelgröße (Istwert).") Beispiel: PID-Regelalgorithmus Zur Vertiefung der im letzten Abschnitt behandelten Fragen soll die numerische Aufbereitung eines PID-Algorithmus mit Festpunktarithmetik behandelt werden. Den zugrundeliegenden,
Beispiel: PID-Regelalgorithmus Zur Vertiefung der im letzten Abschnitt behandelten Fragen soll die numerische Aufbereitung eines PID-Algorithmus mit Festpunktarithmetik behandelt werden. Den zugrundeliegenden,
Umdruck RT: Grundlagen der Regelungstechnik. 1 Grundbegriffe der Steuerungs- und Regelungstechnik. 1.2 Regelung
 Universität Stuttgart Institut für Leistungselektronik und lektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.2 Regelung ÜBUG ZU LKRISCH RGICHIK II Umdruck R: Grundlagen der Regelungstechnik Grundbegriffe
Universität Stuttgart Institut für Leistungselektronik und lektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.2 Regelung ÜBUG ZU LKRISCH RGICHIK II Umdruck R: Grundlagen der Regelungstechnik Grundbegriffe
Regelungstechnik für Ingenieure
 Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik von Dipl.-Ing. Heinz Mann und Dr.-Ing. Horst Schiffelgen 2., überarbeitete und erweiterte Auflage, mit 283 Bildern \\ Carl Hanser Verlag München 1972 Inhaltsverzeichnis
Einführung in die Regelungstechnik von Dipl.-Ing. Heinz Mann und Dr.-Ing. Horst Schiffelgen 2., überarbeitete und erweiterte Auflage, mit 283 Bildern \\ Carl Hanser Verlag München 1972 Inhaltsverzeichnis
8. Regelschaltungen. Name: Daniel Schick Betreuer: Dipl. Ing. D. Bojarski Versuch ausgeführt: 8. Juni 2006 Protokoll erstellt: 11.
 Fortgeschrittenenpraktikum I Universität Rostock - Physikalisches Institut 8. Regelschaltungen Name: Daniel Schick Betreuer: Dipl. Ing. D. Bojarski Versuch ausgeführt: 8. Juni 2006 Protokoll erstellt:
Fortgeschrittenenpraktikum I Universität Rostock - Physikalisches Institut 8. Regelschaltungen Name: Daniel Schick Betreuer: Dipl. Ing. D. Bojarski Versuch ausgeführt: 8. Juni 2006 Protokoll erstellt:
Labor RT Versuch RT1-1. Versuchsvorbereitung. Prof. Dr.-Ing. Gernot Freitag. FB: EuI, FH Darmstadt. Darmstadt, den
 Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
(s + 3) 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)
 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)") Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Grundkurs der Regelungstechnik
 Grundkurs der Regelungstechnik Einführung in die praktischen und theoretischen Methoden von Dr.-Ing. Ludwig Merz em. o. Professor und Direktor des Instituts für Meßund Regelungstechnik der Technischen
Grundkurs der Regelungstechnik Einführung in die praktischen und theoretischen Methoden von Dr.-Ing. Ludwig Merz em. o. Professor und Direktor des Instituts für Meßund Regelungstechnik der Technischen
Bestimmung der Reglerparameter aus den Frequenzkennlinien
 1 Kapitel Bestimmung der Reglerparameter aus den Frequenzkennlinien Mit PSPICE lassen sich die Frequenzgänge der Amplitude und der Phase von Regelkreisen simulieren, graphisch darstellen und mit zwei Cursors
1 Kapitel Bestimmung der Reglerparameter aus den Frequenzkennlinien Mit PSPICE lassen sich die Frequenzgänge der Amplitude und der Phase von Regelkreisen simulieren, graphisch darstellen und mit zwei Cursors
Strukturbildung und Simulation technischer Systeme. Strukturbildung und Simulation technischer Systeme. strukturbildung-simulation.
 Leseprobe zu Kapitel 9 Regelungstechnik des Buchs Strukturbildung und Simulation technischer Systeme Weitere Informationen zum Buch finden Sie unter strukturbildung-simulation.de Im Gegensatz zu Steuerungen
Leseprobe zu Kapitel 9 Regelungstechnik des Buchs Strukturbildung und Simulation technischer Systeme Weitere Informationen zum Buch finden Sie unter strukturbildung-simulation.de Im Gegensatz zu Steuerungen
Regelungstechnik II. Institut für Leistungselektronik und Elektrische Antriebe. Übungen
 Regelungstechnik II Übungen 2 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Der Operationsverstärker (OV, OP) 3 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Aufgaben
Regelungstechnik II Übungen 2 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Der Operationsverstärker (OV, OP) 3 Aufbau eines Regelrechengeräts mit Hilfe von Operationsverstärkern Aufgaben
Praktikum Grundlagen Regelungstechnik
 Praktikum Grundlagen Regelungstechnik Versuch P-GRT 03 Versuchsziel Versuch 3 Photonenstromregelung Untersuchung vom Führungs- und Störverhalten Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Praktikum Grundlagen Regelungstechnik Versuch P-GRT 03 Versuchsziel Versuch 3 Photonenstromregelung Untersuchung vom Führungs- und Störverhalten Datum Versuchsdurchführung: Datum Protokoll: Versuchsgruppe:
Regelungstechnik 1. Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 9 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Einführung in die Regelungstechnik
 Heinz Mann f Horst Schiffelgen f Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann f Horst Schiffelgen f Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Automation-Letter Nr. 1. Prof. Dr. S. Zacher. Die meistgestellten Fragen von Studierenden der Regelungstechnik
 Automation-Letter Nr. 1 Angefangen : 01.11.2015 Aktueller Stand 08.08.2017 Prof. Dr. S. Zacher Die meistgestellten Fragen von Studierenden der Regelungstechnik Ein optimal eingestellter Regelkreis soll
Automation-Letter Nr. 1 Angefangen : 01.11.2015 Aktueller Stand 08.08.2017 Prof. Dr. S. Zacher Die meistgestellten Fragen von Studierenden der Regelungstechnik Ein optimal eingestellter Regelkreis soll
Hauptseminar SOI Regelalgorithmen für Totzeitsysteme
 Hauptseminar SOI 6. Juli 2006 Gliederung des Vortrags Motivation Grundlagen Totzeitsysteme und deren Schwierigkeiten Lösungsansätze für Totzeitsysteme Zusammenfassung Gliederung des Vortrags Motivation
Hauptseminar SOI 6. Juli 2006 Gliederung des Vortrags Motivation Grundlagen Totzeitsysteme und deren Schwierigkeiten Lösungsansätze für Totzeitsysteme Zusammenfassung Gliederung des Vortrags Motivation
70 Jahre Reglereinstellung nach Ziegler und Nichols
 Fakultät Informatik, Institut für angewandte Informatik, Professur für technische Informationssysteme Proseminar Technische Informationssysteme Johannes Postel Dresden, 14. November 2011 Überblick 1. Systembegriff
Fakultät Informatik, Institut für angewandte Informatik, Professur für technische Informationssysteme Proseminar Technische Informationssysteme Johannes Postel Dresden, 14. November 2011 Überblick 1. Systembegriff
Begriffe der DIN Regelung und Steuerung
 Begriffe der DIN 19226 - Regelung und Steuerung Bgrf-RS Das Regeln, die Regelung ist ein Vorgang, bei dem fortlaufend eine Größe, die Regelgröße (die zu regelnde Größe) erfaßt, mit einer anderen Größe,
Begriffe der DIN 19226 - Regelung und Steuerung Bgrf-RS Das Regeln, die Regelung ist ein Vorgang, bei dem fortlaufend eine Größe, die Regelgröße (die zu regelnde Größe) erfaßt, mit einer anderen Größe,
Inhalt. Fliehkraftregler. Regelungen in der Biologie. Regelung der Körpertemperatur. 1 Einführung. Fliehkraftregler von James Watt 1788
 Inhalt Fliehkraftregler von James Watt 1788 Fliehkraftregler Aufgabe: Drehzahlregelung einer Dampfmaschine 1.3 Systemeigenschaften 1.5 Realisierung von Reglern Prof. Dr. Christof Röhrig 21 Prof. Dr. Christof
Inhalt Fliehkraftregler von James Watt 1788 Fliehkraftregler Aufgabe: Drehzahlregelung einer Dampfmaschine 1.3 Systemeigenschaften 1.5 Realisierung von Reglern Prof. Dr. Christof Röhrig 21 Prof. Dr. Christof
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik von Heinz Mann und Horst Schiffelgen 6., bearbeitete und erweiterte Auflage, mit 349 Bildern Carl Hanser Verlag München Wien Formelzeichen XII Einleitung 1 1 Steuerung
Einführung in die Regelungstechnik von Heinz Mann und Horst Schiffelgen 6., bearbeitete und erweiterte Auflage, mit 349 Bildern Carl Hanser Verlag München Wien Formelzeichen XII Einleitung 1 1 Steuerung
Eingebettete Systeme
 Institut für Informatik Lehrstuhl für Eingebettete Systeme Prof. Dr. Uwe Brinkschulte Benjamin Betting Eingebettete Systeme 1. Aufgabe (Regelsystem) 3. Übungsblatt Lösungsvorschlag a) Das Fahrzeug kann
Institut für Informatik Lehrstuhl für Eingebettete Systeme Prof. Dr. Uwe Brinkschulte Benjamin Betting Eingebettete Systeme 1. Aufgabe (Regelsystem) 3. Übungsblatt Lösungsvorschlag a) Das Fahrzeug kann
Institut für Leistungselektronik und Elektrische Antriebe. Übungen Regelungstechnik 2
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Beschreibung linearer Systeme im Frequenzbereich
 Beschreibung linearer Systeme im Frequenzbereich Jan Albersmeyer Seminar Regelungstechnik Ziel Man möchte das Verhalten linearer Systeme der Form in Abhängigkeit der Steuerungen u(t) beschreiben. 22.11.2002
Beschreibung linearer Systeme im Frequenzbereich Jan Albersmeyer Seminar Regelungstechnik Ziel Man möchte das Verhalten linearer Systeme der Form in Abhängigkeit der Steuerungen u(t) beschreiben. 22.11.2002
Ersatzschaltbild eines Operationsverstärkers für den Betrieb bei niederen Frequenzen
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Ersatzschaltbild eines Operationsverstärkers für den Betrieb bei niederen Frequenzen Unterlagen zur Vorlesung Regelungstechnik
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Ersatzschaltbild eines Operationsverstärkers für den Betrieb bei niederen Frequenzen Unterlagen zur Vorlesung Regelungstechnik
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Anton Braun Kontinuierliche und diskrete Systeme ISBN 3-446-40305-1 Leseprobe Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-40305-1 sowie im Buchhandel
Grundlagen der Regelungstechnik Anton Braun Kontinuierliche und diskrete Systeme ISBN 3-446-40305-1 Leseprobe Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-40305-1 sowie im Buchhandel
Klausur im Fach: Regelungs- und Systemtechnik 1
 (in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
(in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
Regelung einer Luft-Temperatur-Regelstrecke
 Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Technische Universität Berlin Fakultät IV Elektrotechnik und Informatik Fachgebiet Regelungssysteme Leitung: Prof. Dr.-Ing. Jörg Raisch Praktikum Grundlagen der Regelungstechnik Regelung einer Luft-Temperatur-Regelstrecke
Regelungstechnik 1. Oldenbourg Verlag München Wien
 Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Versuchsanleitung MV_5_1
 Modellbildung und Simulation Versuchsanleitung MV_5_1 FB 2 Stand August 2011 Prof. Dr.-Ing. Hartenstein Seite 1 von 11 1. Versuchsgegenstand Versuchsziel Ziel des Versuches ist es, die im Lehrfach Mechatronische
Modellbildung und Simulation Versuchsanleitung MV_5_1 FB 2 Stand August 2011 Prof. Dr.-Ing. Hartenstein Seite 1 von 11 1. Versuchsgegenstand Versuchsziel Ziel des Versuches ist es, die im Lehrfach Mechatronische
ka (s + c 0 )(s + c 1 )s 1 c 0 (c 0 c 1 ) e c 0t + lim = k R k max = π 4T t b2) und aus der Hauptlösung der Phasenbedingung die Reglerverstärkung
(s + c 1 )s 1 c 0 (c 0 c 1 ) e c 0t + lim = k R k max = π 4T t b2) und aus der Hauptlösung der Phasenbedingung die Reglerverstärkung") Aufgabe 1: Systemanalyse a) Sprungantwort des Übertragungssystems: X(s) = ka (s + c 0 )(s + c 1 )s a1) Zeitlicher Verlauf der Sprungantwort: [ 1 x(t) = ka + c 0 c 1 a2) Man erhält dazu den Endwert: 1 c
Aufgabe 1: Systemanalyse a) Sprungantwort des Übertragungssystems: X(s) = ka (s + c 0 )(s + c 1 )s a1) Zeitlicher Verlauf der Sprungantwort: [ 1 x(t) = ka + c 0 c 1 a2) Man erhält dazu den Endwert: 1 c
Regelungstechnik für Ingenieure
 Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Mechatronik Grundlagen
 Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Grundlagen der Automatisierungstechnik Teil 2: Regelungstechnik
 Kirbach Grundlagen der Automatisierungstechnik Teil 2: Regelungstechnik AUTOMATISIERUNGSTECHNIK / MSR-TECHNIK Studienbrief 2-050-1202-D 1. Auflage 2000 HDL HOCHSCHULVERBUND DISTANCE LEARNING Verfasser:
Kirbach Grundlagen der Automatisierungstechnik Teil 2: Regelungstechnik AUTOMATISIERUNGSTECHNIK / MSR-TECHNIK Studienbrief 2-050-1202-D 1. Auflage 2000 HDL HOCHSCHULVERBUND DISTANCE LEARNING Verfasser:
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Regelungstechnik B. Prof. Dr. techn. F. Gausch Dipl.-Ing. C.
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Einleitung Einführung in die Aufgabenstellung der Regelungstechnik Beispiel einer Wasserstandsregelung 5
 INHALTSVERZEICHNIS Einleitung 1 1. Einführung in die Aufgabenstellung der Regelungstechnik 5 1.1 Beispiel einer Wasserstandsregelung 5 1.1.1 Verbale Systembeschreibung 5 1.1.2 Anforderungen an die Regelung
INHALTSVERZEICHNIS Einleitung 1 1. Einführung in die Aufgabenstellung der Regelungstechnik 5 1.1 Beispiel einer Wasserstandsregelung 5 1.1.1 Verbale Systembeschreibung 5 1.1.2 Anforderungen an die Regelung
1. Laborpraktikum. Abbildung 1: Gleichstrommotor Quanser QET
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Stephanie Geist Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Lehrveranstaltung Grundlagen der Regelungstechnik
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Stephanie Geist Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Lehrveranstaltung Grundlagen der Regelungstechnik
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (8) Basiswissen Regelungstechnik Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Anmerkung zum Gyro Auflösung Zeitkonstante current_rot_deg
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (8) Basiswissen Regelungstechnik Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Anmerkung zum Gyro Auflösung Zeitkonstante current_rot_deg
BSc PRÜFUNGSBLOCK 2 / D-MAVT VORDIPLOMPRÜFUNG / D-MAVT. Musterlösung
 Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Institut für Mess- und Regeltechnik BSc PRÜFUNGSBLOCK / D-MAVT.. 005. VORDIPLOMPRÜFUNG / D-MAVT REGELUNGSTECHNIK I Musterlösung Dauer der Prüfung: Anzahl der Aufgaben: Bewertung: Zur Beachtung: Erlaubte
Automatisierungstechnik 1
 Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
Vorlesung 3. Struktur Ofensystem
 Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear
Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear
Praxisorientierte Verbesserungsvorschläge
 Fakultät Informatik, Professur Technische Informationssystem PID-Regler Praxisorientierte Verbesserungsvorschläge Erik Ulbricht, 09.07.2010 Inhalt 1. Regelungstechnik 1.1 Laplace-Transformation 1.2 PID-Struktur
Fakultät Informatik, Professur Technische Informationssystem PID-Regler Praxisorientierte Verbesserungsvorschläge Erik Ulbricht, 09.07.2010 Inhalt 1. Regelungstechnik 1.1 Laplace-Transformation 1.2 PID-Struktur
Frequenzganganalyse, Teil 2: P-, I- und D - Glieder
 FELJC Frequenzganganalyse_neu_2.odt 1 Frequenzganganalyse, Teil 2: P-, I- und D - Glieder 2.1 P0-Glieder P0: P-Glied ohne Verzögerung P-Glied nullter Ordnung Aufgabe 2.1: Bestimme den Proportionalbeiwert
FELJC Frequenzganganalyse_neu_2.odt 1 Frequenzganganalyse, Teil 2: P-, I- und D - Glieder 2.1 P0-Glieder P0: P-Glied ohne Verzögerung P-Glied nullter Ordnung Aufgabe 2.1: Bestimme den Proportionalbeiwert
() 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)
 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)") Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen erfolgen:
 1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
Der kybernetische Ansatz zum Verständnis der dissipativen Strukturen
 Der kybernetische Ansatz zum Verständnis der dissipativen Strukturen 1. Was ist Kybernetik? Norbert Wiener: "Cybernetics. Control and Communications in the Animal and the Machine", New York 1948 (dt. "Kybernetik",
Der kybernetische Ansatz zum Verständnis der dissipativen Strukturen 1. Was ist Kybernetik? Norbert Wiener: "Cybernetics. Control and Communications in the Animal and the Machine", New York 1948 (dt. "Kybernetik",
Standardregelkreis. Regelungstechnik. Einführung: Regler Stellglied Regelstrecke. Messglied. Dynamik Linearer Systeme
 Regelungstechnik Einführung: Störgröße Sollwert + - Regler Stellglied Regelstrecke Regelgröße Messglied Dynamik Linearer Systeme Standardregelkreis Wirken auf ein System in Abhängigkeit der Zeit die Größen
Regelungstechnik Einführung: Störgröße Sollwert + - Regler Stellglied Regelstrecke Regelgröße Messglied Dynamik Linearer Systeme Standardregelkreis Wirken auf ein System in Abhängigkeit der Zeit die Größen
Optimierung. 1. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit.
 FELJC Optimierung_Theorie.odt Optimierung. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit. Hierzu gibt es unterschiedliche
FELJC Optimierung_Theorie.odt Optimierung. Grundlegendes Beim PID-Regler müssen 3 Parameter optimal eingestellt werden: Proportionalbeiwert, Nachstellzeit und Vorhaltezeit. Hierzu gibt es unterschiedliche
Klausur: Regelungs- und Systemtechnik 2
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Klausur: Regelungs- und Systemtechnik 2 Kirchhoff-Hörsaal 1 Donnerstag, den 19. 09. 2013 Beginn: 09.30 Uhr Bearbeitungszeit: 120 Minuten
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Klausur: Regelungs- und Systemtechnik 2 Kirchhoff-Hörsaal 1 Donnerstag, den 19. 09. 2013 Beginn: 09.30 Uhr Bearbeitungszeit: 120 Minuten
Regelung. Roddeck, W.: Einführung in die Mechatronik; Teubner Verlag, 2. Auflage, 2003, Kapitel 7
 Regelung Die Regelung ist ein Vorgang, bei dem der vorgegebene Wert einer Größe fortlaufend durch Eingriff aufgrund von Messungen dieser Größe hergestellt und aufrechterhalten wird. Hierdurch entsteht
Regelung Die Regelung ist ein Vorgang, bei dem der vorgegebene Wert einer Größe fortlaufend durch Eingriff aufgrund von Messungen dieser Größe hergestellt und aufrechterhalten wird. Hierdurch entsteht
Regelstrecken. 2.1 Definition. 2.2 Analyse des Verhaltens von Regelstecken
 Regelstrecken 2 2.1 Definition I Nach DIN IEC 60050-351 ist die Regelstrecke diejenige Funktionseinheit, die entsprechend der Regelungsaufgabe beeinflusst wird (vgl. Abb. 1.10 i. V. m. Tab. 1.1). Zur Regelstrecke
Regelstrecken 2 2.1 Definition I Nach DIN IEC 60050-351 ist die Regelstrecke diejenige Funktionseinheit, die entsprechend der Regelungsaufgabe beeinflusst wird (vgl. Abb. 1.10 i. V. m. Tab. 1.1). Zur Regelstrecke